
Титульный лист и исполнители
РЕФЕРАТ
Отчет содержит 153 стр., 9 табл., 42 рис.
ДИСТАНЦИОННЫЙ МОНИТОРИНГ, СЕНСОРЫ, ТОЧНОЕ ЗЕМЛЕДЕЛИЕ, ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПРИНЯТИЯ РЕШЕНИЙ, ТЕСТ-ПОЛИГОН, УМНЫЙ САД.
Конкурентным преимуществом и научной новизной проекта является реализация приоритетов Стратегии научно-технологического развития РФ и «Переход к передовым цифровым, интеллектуальным производственным технологиям, роботизированным системам, к новым материалам и способам конструирования, создание систем обработки больших объемов данных, машинного обучения и искусственного интеллекта» на основе передовых производственных и «сквозных» технологий в отрасли промышленного садоводства.
Практическим результатом выполненных работ по проекту на момент даты отчета являются:
- Интерактивная специализированная нормативно-справочная база данных «Машинные технологии промышленного садоводства (ТОП-модель)» в составе автоматизированного рабочего места АРМ «Садовод-технолог», предназначенная для систематизации, поиска и хранения информации о машинных технологиях промышленного садоводства, включающих технологии, операции и приемы (машины и оборудование) в рамках единого информационного пространства (ЕИП).
- Проектно-конструкторская документация на систему дистанционного автоматического мониторинга влажности и температуры почвы и систему управления капельным поливом на основе безпроводного коммуникационного оборудования сети LoRaWAN отечественной компании «ВЕГА Абсолют».
- Прикладное программное обеспечение локального автоматизированного рабочего места оператора АРМ «Садовод-управленец», обеспечивающего оперативный контроль и управление технологическими процессами на основе дистанционного автоматического мониторинга, оперативной вычислительной обработки результатов и представления информации в удобном для дальнейшей обработки виде.
- Техническое задание (ТЗ), технико-экономическое обоснование (ТЭО) и виртуальные прототипы (модели технического облика) роботизированных и мехатронных модулей машинных технологий на основе «безтракторного» земледелия в формате «Умный сад».
- Технико-экономическое обоснование (ТЭО) и закладка тест-полигона «Умный сад», содержащий сад безопорный (160 деревьев); сад интенсивный (500 деревьев); сад суперинтенсивный (750 деревьев); маточник яблони (1100 растений); питомник яблони 1 очереди (2200 растений); питомник яблони 2 очереди (2200 растений); питомник яблони 3 очереди (2200 растений).
ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
В отчете применяются следующие термины и определения:
Большие данные (Big Data) – обозначение структурированных и неструктурированных данных огромных объёмов, значительного многообразия, обрабатываемых горизонтально масштабируемыми программными инструментами.
Средства измерения – устройства обеспечивающие преобразование информации о внешней среде в данные, пригодные для передачи их средствам обработки. Это могут быть как отдельные датчики температуры, освещения, влажности и т.д., так и сложные измерительные комплексы.
Средства передачи информации – система обеспечивающая передачу данных как по проводным так и беспроводным сетям.
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ И ОБОЗНАЧЕНИЙ
В настоящем отчете о НИР применяются следующие сокращения и обозначения:
Большие данные (Big Data) – обозначение структурированных и неструктурированных данных огромных объёмов, значительного многообразия, обрабатываемых горизонтально масштабируемыми программными инструментами.
CALS (Computer Acquisition and Life-cycle Support) – непрерывная информационная поддержка жизненного цикла продукции;
ИПИ (русскоязычный аналог понятия CALS) – информационная поддержка процессов жизненного цикла изделий;
CALМ (Computer Aided Lean Management) – информационная поддержка управления бережливым производством.
PLM (Product Lifecycle Management) – процесс управления информацией об изделии на протяжении всего его жизненного цикла.
PDM (Product Data Management) – системы управления проектными данными.
SCM (Supply Chain Management) – системы управления цепочками поставок.
CPC (Collaborative Product Commerce) – системами управления данными в интегрированном информационном пространстве.
ERP (Enterprise Resource Planning) – системы планирования и управления.
MRP/ MRP-2 (Manufacturing Requirement Planning) – системы планирования производства и требований к материалам.
SCADA (Supervisory Control and Data Acquisition) – система сбора и обработки данных о состоянии оборудования и технологических процессов и др.
IOT — технологий Интернета вещей
WNAN — Wireless Neighborhood Area Network
WWAN — Wireless Wide Area Network
ВВЕДЕНИЕ
Стратегическая цель социально-экономического развития регионов России определяет лидерство в удовлетворенности населения качеством жизни и окружающей среды на основе новой индустриализации, социальной модернизации, всесторонней цифровизации и эффективного государственного регулирования.
Стратегией социально-экономического развития регионов цифровая трансформация сельского хозяйства определена как ключевой приоритет.
Основными направлениями цифровизации сельского хозяйства являются: создание базы данных, включающей экономическую информацию о сельскохозяйственных товаропроизводителях, историю полей, данные о состоянии почвы и почвенных разностей, сельскохозяйственные зоны, данные о потреблении хозяйствами минеральных удобрений, топлива, материальных ресурсов, данные о продажах сельскохозяйственной продукции по видам, информацию об используемых основных средствах, имеющейся технике и оборудовании.
В части промышленного садоводства новая индустриализация и всесторонняя цифровизация позволит довести к 2030 году валовый сбор плодов и ягод до 72,0 тыс. тонн и обеспечить покрытие дефицита самообеспечения населения области плодово-ягодной продукцией.
Данные положения закреплены в Постановлении Администрации Тамбовской области от 02.11.2018 за №1141 «Об утверждении Плана мероприятий по реализации Стратегии социально-экономического развития Тамбовской области до 2035 года (с изменениями на 12.03.2019 г. за №241)» и «Инвестиционном послании Главы администрации Тамбовской области А.В. Никитина на 2018 год».
Одним из приоритетных направлений стратегического развития определено направление «Новая индустриализация, переход к цифровой и постиндустриальной экономике» для реализации которого требуется проведение следующих мероприятий:
1. Разработать принципы, технико-технологические решения и нормативы цифровой трансформации промышленного садоводства на примере проекта «Умный сад».
2. Разработать сенсорные технологии в промышленном садоводстве на примере интеллектуального полива тест-полигона «Умный сад».
3.Сформулировать принципы инженерного обеспечения промышленного садоводства в формате «Умный сад» на основе «безтракторного» земледелия.
4. Создать систему принятия решений и интеллектуального управления в формате «Умный сад».
5. Разработать подходы и систему тиражирования и коммерциализации проектов «Умный сад».
Проект «Умный сад» направлен на разработку и практическую реализацию современного научно-технологического облика промышленного садоводства на основе Передовых Производственных Технологий и Цифровой трансформации.
В результате реализации проекта «Умный сад» будет создан научно-технологический задел, обеспечивающий опережающее развитие и достижение требуемого уровня готовности технологий для запуска тиражируемых проектов «Умный сад».
1. НАПРАВЛЕНИЕ «НОРМАТИВНОЕ РЕГУЛИРОВАНИЕ ЦИФРОВОЙ ТРАНСФОРМАЦИИ ПРОМЫШЛЕННОГО САДОВОДСТВА»
Разработаны и реализованы научно-технические принципы регионального подбора технических средств в формате, реализованные в автоматизированной системе рационального подбора и формирования машинных технологий в промышленном садоводстве и питомниководстве.
В основу системы рационального подбора и формирования машинных технологий в промышленном садоводстве положен тезис о том, что «известные математические модели для оптимального планирования средств технической оснащенности сельского хозяйства отвечают требуемой постановке задачи, при которой из возможных вариантов состава парка определяют вариант, обеспечивающий выполнение заданного объема работ в требуемые агротехнические сроки и в последовательности, предусмотренной технологией производства». При этом, целевая функция задачи рационального подбора техники для машинной технологии заключается в минимизации общих затрат на выполнение всей технологии, с учётом экономической эффективности применяемых технических средств и их «вписываемости» в экологически безопасные агротехнологии.
Основными требованиями, предъявляемыми к программным средствам для рационального подбора техники, являются:
- Возможность проведения анализа технических средств на соответствие параметров экологически безопасных машинных агротехнологий;
- Способность исследования современных машинных технологий в промышленном садоводстве в зависимости от степени интенсификации технологии и функциональности применяемых машин;
На основе данных требований разработан программный комплекс, предназначенный для оптимизации процесса проектирования машинных технологий возделывания маточников и питомников, реализующий подбор технических средств для самых различных типов питомниководческих хозяйств, в зависимости от конструктивных параметров используемых машин и технологий.
Программный комплекс позволяет:
1. Проводить оценку эффективности применения той или иной техники на определённой операции в конкретных производственных условиях по экономическим и экологическим критериям на базе передовых машинных технологий возделывания и уборки продукции садоводства.
2. Определять оптимальный состав технических средств, с внесением соответствующих корректив в технологическую карту и подготавливать технологические решения, необходимые для качественного управления рабочими процессами машинной технологии.
3. Определять частные и интегральные показатели и критерии энергоэффективности специализированных технических средств.
4. Дополнительно может служить справочным материалом для специалистов-технологов в сфере АПК, аспирантов и студентов.
Результаты апробации программного комплекса подтверждают его работоспособность при создании оптимизационных моделей и принятия эффективных управленческих решений в системе 3D+6D-модели «техника – эксплуатация – стоимость операции».
По утверждению авторов представленного проекта, информационно-технологическая модель промышленного садоводства в 3D + 6D формате позволяет управлять производством качественной продукции на основе индивидуального подхода к каждому объекту воздействия (саженцы и плодовые деревья) в общей цепочке производственно-технологических мероприятий (3D – модель) и процедур 4D, 5D, 6D. Данный подход является принципиально новым научным направлением в использовании технологий точного земледелия в промышленном садоводстве и питомниководстве.
1.1 Описание интерактивной специализированной нормативно-справочной базы данных «Машинные технологии промышленного садоводства»
1.1.1 Общие сведения
Обозначение и наименование программы
Программа «Интерактивная специализированная нормативно-справочная база данных «Машинные технологии промышленного садоводства» имеет следующие атрибуты:
— Наименование исполняемого файла — ISNSBD.exe
— Размер исполняемого файла — 3854 Мбайт
— Версия файла — 1.1.0.0
— Размер базы данных — 124877 Мбайт
— Версия продукта — 1.01.0003
— Внутреннее имя — ISNSBD
— Исходное имя файла — ISNSBD.exe
— Название продукта — Интерактивная специализированная нормативно-справочная база данных «Машинные технологии промышленного садоводства»
— Описание версии файла — 1.01.0003
— Производитель — ФГБОУ ВО Мичуринский ГАУ
— Язык — Русский
Программное обеспечение необходимое для функционирования программы
Программа работает под управлением ОС Windows 8.1/10. Для функционирования модуля СУБД необходимо установленное программное обеспечение MS Access 2003 – 2016.
Языки программирования, на которых написана программа
Подсистема СУБД разработана на языке программирования Visual Basic for Application (VBA) и реализована на MS Access. Исходным языком программирования модуля интерфейса является C#. Среда разработки, компилятор – MS Visual Studio 2017.
1.1.2 Функциональное назначение
Назначение программы.
Программа предназначена для интерактивного поиска, отбора и пополнения данных в специальной базе содержащей информацию о технике для садоводства. Хранение информации производится в СУБД MS Access, для организации комфортной визуальной среды разработан модуль графического интерфейса.
Программа решает следующие задачи:
— осуществляет поиск по основным характеристикам о технике для садоводства в базе данных с отображением результатов в виде таблицы-списка;
— формирует исходный набор характеристик и их предельных значений, по которым осуществляется поиск, сортировка и фильтрация информации, содержащейся в базе данных;
— реализует сортировку и фильтрацию результатов поиска с отображением выходных данных в виде таблицы-списка;
— предоставляет возможность выбора из таблицы-списка конкретного экземпляра техники с выводом детальной информации о нем в виде гипертекстового документа;
— обеспечивает возможность отбора из таблицы-списка нескольких экземпляров техники для их детального сравнения с отображением результатов в виде гипертекстового документа;
— предоставляет персонифицированный доступ к внесению и модификации информации в базе данных на основании авторизации и аутентификации.
Сведения о функциональных ограничениях на применение
Объем базы данных не может превышать 2ГБ. Общее количество объектов базы данных не может превышать 32768. Количество одновременно работающих пользователей с базой данных не может превышать 255. Данные ограничения обусловлены технологическими ограничениями СУБД MS Access.
1.1.3 Описание логической структуры
Программа реализует два режима работы: пользовательский и сервисный режим. Пользовательский режим является режимом по умолчанию и в нем реализуются основные функции программы по поиску и отображению информации. Для входа в сервисный режим необходимо успешно пройти процедуру авторизации и аутентификации. В данном режиме задаются настройки программы, а также реализован алгоритм пополнения базы данных.
Структура программы
Программа состоит из двух основных модулей: модуля интерфейса и модуля СУБД.
Модуль интерфейса автоматически запускается при старте программы ISNSBD и состоит из следующих основных функций, приведенных в таблице 1.1.
Таблица 1.1 — Перечень подпрограмм-функций программы ISNSBD
| Имя | Тип результата | Назначение |
| FirstCreateGrid | dataGridView | Инициализирует настройки таблицы |
| SetWidthColumnsToGrid | dataGridView | Устанавливает ширину столбцов таблицы, пропорционально ширине главного окна |
| LoadDataToGrid | dataGridView | На основании строки SQL-запроса формирует список объектов и помещает их в таблицу |
| toolStripButton2_Click | tabControl, WebBrowser | Создает новую вкладку, размещает на ней окно Web-браузера, помещает в это окно, сгенерированный файл с информацией об объекте. |
| ProgramSettings | OleDbConnection | Выполняет изменение параметров базы данных, вида и цветовых схем окон, настроек доступа. |
Описание функций модуля интерфейса
Модуль построен на основе оконного интерфейса, с главным окном и модальными окнами. При старте программы процедура FirstCreateGrid создает в главном окне шаблон таблицы элемента интерфейса dataGridView, в которую в дальнейшем будут помещаться объекты из БД.
Подпрограмма SetWidthColumnsToGrid устанавливает ширину столбцов элемента интерфейса dataGridView, пропорционально ширине главного окна. Данная подпрограмма вызывается в момент начальной инициализации программы, после подпрограммы
FirstCreateGrid и в дальнейшем, всегда в момент изменения размеров главного окна.
Подпрограмма LoadDataToGrid предназначена для создания таблицы на основании элемента интерфейса dataGridView, куда помещается в табличном виде информация по SQL-запросу из базы данных. Данная подпрограмма вызывается при начальной инициализации программы и всегда, когда необходимо выполнить SQL-запрос к базе данных и отобразить результаты запроса в таблицу элемента интерфейса dataGridView.
После старта программы и создания элементов графического интерфейса пользователя, программа переходит в режим отслеживания действий пользователя (событий) и реакций на эти действия. К таким элементам интерфейса относится меню команд и панель инструментов, на которой дублируются в виде кнопок наиболее часто используемые команды из меню. К основным командам можно отнести: поиск, сортировка (по возрастанию и убыванию), фильтрация, вывод на экран подробной информации по выбранным объектам БД.
Процедура toolStripButton2_Click вызывается при возникновении события выбора из меню или с панели инструментов соответствующей команды и предназначена для создания новой вкладки, размещения на этой вкладке окна Web-браузера и вывода в окно файла с информацией об объекте.
Процедура ProgramSettings предназначена для реализации сервисных функций программы: устанавливает параметры подключения к базе данных, задает учетные записи администраторов и внешний вид интерфейса.
Алгоритм работы основных процедур программы приведен на рисунке 1.1
Описание модуля СУБД
Моделирование предметной области базируется на использовании графических диаграмм, включающих разнородные компоненты (сущности, связи, типы данных). Была построена модель «сущность – связь», которая отображена в виде ER-диаграммы на рисунке 1.2.
Рисунок 1.1. Блок-схема алгоритма программы
Рисунок 1.2 — ER-диаграмма модели предметной области
Связи между сущностями приведены в таблице 1.2.
Таблица 1.2 — Взаимосвязи сущностей предметной области
| Сущность | Связь | Сущность |
| Агрегат | 1:N | Модификация |
| Агрегат | 1:N | Характеристика |
| Тип агрегата | 1:N | Агрегат |
| Модификация | 1:N | Характеристика |
| Производитель | 1:N | Агрегат |
| Страна | 1:N | Производитель |
| Параметр | 1:N | Характеристика |
Выбор представленной модели организации данных позволяет в процессе эксплуатации программы добавлять новые характеристики объектов базы данных без нарушения логической целостности базы данных.
На основании приведенной ER-диаграммы была создана схема данных, которая представлена рисунке 1.3.
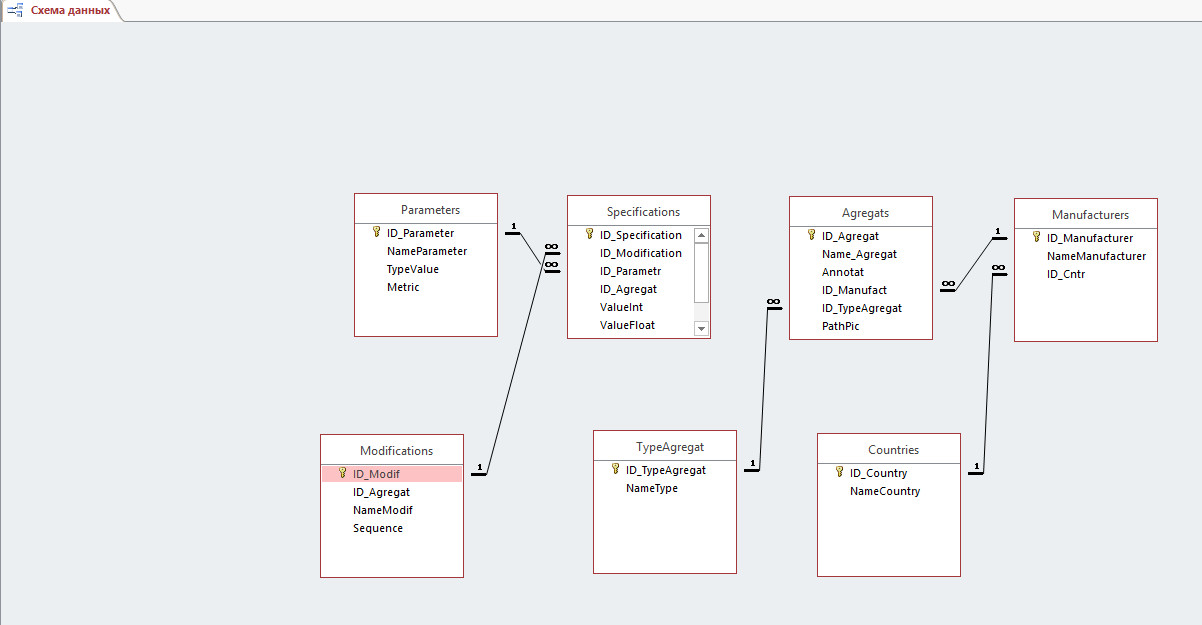
Рисунок 1.3. Схема данных модуля СУБД
Связи между составными частями программы
Связи между основной процедурой и функциями программы выполняются в виде стандартных вызовов подпрограмм. Связи между модулем интерфейса и модулем СУБД обеспечивается посредством использования библиотек ADO.NET входящих в Microsoft .NET Framework используемых для организации взаимодействия с БД Microsoft Access посредством трансляции SQL-запросов.
1.1.4 Используемые технические средства
Программа эксплуатируется на персональном компьютере (ПК) типа IBM. Режим работы – в форме оконного приложения MS Windows, посредством интерактивного взаимодействия с оператором. Входные и выходные данные хранятся в СУБД MS Access на жестком диске компьютера.
Требования к ПК:
IBM-совместимый персональный компьютер (ПЭВМ), включающий в себя:
- процессор с тактовой частотой, 2.5 ГГц, или выше;
- оперативную память объемом, 2 Гб, или выше;
- жесткий диск объемом 128 Гб, и выше;
- монитор с разрешением экрана не менее 1024 x 768 пикселей.
1.1.5 Вызов и загрузка
После инсталляции программы на жесткий диск, ее вызов осуществляется посредством выбора соответствующего ярлыка из меню «Пуск» или запуска ярлыка с рабочего стола. После установки программы необходима предварительная настройка подключения к базе данных. Процедура установки, начальной настройки и основные этапы работы с программой изложены в документе «Руководство пользователя».
1.1.6 Входные данные
В качестве входных данных используется следующая информация:
- база данных с объектами и характеристиками предметной области «Техника для садоводства»;
- данные интерактивных форм графического интерфейса программы.
Схема данных, используемая для хранения объектов предметной области интерактивной специализированной нормативно-справочная базы данных, приведена в подразделе 1.1.3 данного документа.
1.1.7 Выходные данные
В качестве выходных данных используется следующая информация:
- данные интерактивных форм графического интерфейса программы;
- документы-отчеты, генерируемые на основании запросов оператора к базе данных, которые возможно сохранить в формате гипертекстового документа или файла pdf на жестком диске персонального компьютера.
1.1.8 Текст программы
Sub ReadMDB_добавить_запись()
Dim tbl As Recordset
Dim SQLr As String
Dim dbs As Database
Dim kol As Long
`Пример кода для заполнения таблиц базы данных
Set dbs = DAO.OpenDatabase(«E:\data.mdb»)
Set tbl = dbs.OpenRecordset(«agregats_rs»)
kol = tbl.RecordCount + 1000
SQLr = «INSERT INTO agregats_rs (ID_Agregat, Name_Agregat, Annotat, ID_Manufact, ID_TypeAgregat, PathPic) Values (» & kol & «,Уневерсальный комплекс для работы в маточниках УКМ (Olimpia)’,’Предназначен для выполнения широкого спектра работ по выращиванию и уходу за маточными плодовыми растениями. Универсальный комплекс УКМ – это результат опыта, который компания ООО «НПП «ПитомникМаш» накопила в области питомниководства. Рациональность конструкции и модульность компонентов превращают эту машину в универсальную модель для использования, как в специальных отраслях садоводства’, 8, 1, ‘image’ )»
dbs.Execute SQLr
tbl.Close
Set tbl = Nothing
dbs.Close
Set dbs = Nothing
End Sub
private void FirstCreateGrid()
{
/** Создает шапку таблицы DataGrid ****/
var column1 = new DataGridViewImageColumn();
column1.HeaderText = «Изображение»; //текст в шапке
column1.ReadOnly = true; //значение в этой колонке нельзя править
column1.Name = «image»; //текстовое имя колонки, его можно использовать вместо обращений по индексу
column1.Frozen = true; //флаг, что данная колонка всегда отображается на своем месте
var column2 = new DataGridViewColumn();
column2.HeaderText = «Наименование модели»; //текст в шапке
column2.ReadOnly = true; //значение в этой колонке нельзя править
column2.Name = «name»; //текстовое имя колонки, его можно использовать вместо обращений по индексу
column2.Frozen = true; //флаг, что данная колонка всегда отображается на своем месте
column2.CellTemplate = new DataGridViewTextBoxCell(); //тип нашей колонки
var column3 = new DataGridViewColumn();
column3.HeaderText = «Тип»; //текст в шапке
column3.ReadOnly = true; //значение в этой колонке нельзя править
column3.Name = «type»; //текстовое имя колонки, его можно использовать вместо обращений по индексу
column3.Frozen = true; //флаг, что данная колонка всегда отображается на своем месте
column3.CellTemplate = new DataGridViewTextBoxCell(); //тип нашей колонки
var column4 = new DataGridViewColumn();
column4.HeaderText = «Аннотация»; //текст в шапке
column4.ReadOnly = true; //значение в этой колонке нельзя править
column4.Name = «annotation»; //текстовое имя колонки, его можно использовать вместо обращений по индексу
column4.Frozen = true; //флаг, что данная колонка всегда отображается на своем месте
column4.CellTemplate = new DataGridViewTextBoxCell(); //тип нашей колонки
var column5 = new DataGridViewColumn();
column5.HeaderText = «Предприятие производитель»; //текст в шапке
column5.ReadOnly = true; //значение в этой колонке нельзя править
column5.Name = «fabric»; //текстовое имя колонки, его можно использовать вместо обращений по индексу
column5.Frozen = true; //флаг, что данная колонка всегда отображается на своем месте
column5.CellTemplate = new DataGridViewTextBoxCell(); //тип нашей колонки
var column6 = new DataGridViewColumn();
column6.HeaderText = «Страна производителя»; //текст в шапке
column6.ReadOnly = true; //значение в этой колонке нельзя править
column6.Name = «cantry»; //текстовое имя колонки, его можно использовать вместо обращений по индексу
column6.Frozen = true; //флаг, что данная колонка всегда отображается на своем месте
column6.CellTemplate = new DataGridViewTextBoxCell(); //тип нашей колонки
var column7 = new DataGridViewColumn();
column7.HeaderText = «ID»; //текст в шапке
column7.ReadOnly = true; //значение в этой колонке нельзя править
column7.Name = «ID»; //текстовое имя колонки, его можно использовать вместо обращений по индексу
column7.Frozen = true; //флаг, что данная колонка всегда отображается на своем месте
column7.CellTemplate = new DataGridViewTextBoxCell(); //тип нашей колонки
column7.Visible = false;
dataGridView1.Columns.Add(column1);
dataGridView1.Columns.Add(column2);
dataGridView1.Columns.Add(column3);
dataGridView1.Columns.Add(column4);
dataGridView1.Columns.Add(column5);
dataGridView1.Columns.Add(column6);
dataGridView1.Columns.Add(column7);
dataGridView1.AllowUserToAddRows = false; //запрешаем пользователю самому добавлять строки
// Выравниваем текст в заголовках столбцов
foreach (DataGridViewColumn column in dataGridView1.Columns)
{
column.HeaderCell.Style.Alignment = DataGridViewContentAlignment.MiddleCenter;
}
SetWidthColumnsToGrid(); //масштабируем ширину столбцов
}
private void SetWidthColumnsToGrid()
{
/** Масштабирует ширину столбцов таблицы-списка в зависимости от ширины окна ****/
dataGridView1.Columns[0].Width = 100;
dataGridView1.Columns[1].Width = 2 * (tabControl1.Width — 180) / 9;
dataGridView1.Columns[2].Width = (tabControl1.Width — 180) / 9;
dataGridView1.Columns[3].Width = 4 * (tabControl1.Width — 180) / 9;
dataGridView1.Columns[4].Width = (tabControl1.Width — 180) / 9;
dataGridView1.Columns[5].Width = (tabControl1.Width — 180) / 9;
dataGridView1.Columns[6].Width = 0;
}
private void LoadDataToGrid(string strAddSQL)
{
/** Заполняет таблицу DataGrid ****/
//Строка соединения с БД, котороя содержит провайдера для подключения и имя базы данных
string connectString = «Provider=Microsoft.ACE.OLEDB.16.0;Data Source=» + Environment.CurrentDirectory + «\\store\\Data.accdb»;
// Объявляем переменную для подключения к БД.
OleDbConnection connection = new OleDbConnection();
//Подключаемся к БД в соотвествии со строкой подключения
connection.ConnectionString = connectString;
//Инициализируем новую переменну содержащую комманду — запрос
OleDbCommand command = new OleDbCommand();
OleDbCommand command2 = new OleDbCommand();
//Текст комманды-запроса к базе данных
command.CommandText = strAddSQL;
//Задаем подключение System.Data.OleDb.OleDbConnection, используемое экземпляром класса System.Data.OleDb.OleDbCommand.
command.Connection = connection;
try
{
//Открываем новое подключение к базе данных со значениями свойств,
//определяемыми объектом
//System.Data.OleDb.OleDbConnection.ConnectionString.
connection.Open();
//Отправляет System.Data.OleDb.OleDbCommand.CommandText
//в System.Data.OleDb.OleDbCommand.Connection
//и создает объект System.Data.OleDb.OleDbDataReader.
OleDbDataReader dr = command.ExecuteReader();
//Значение true, если объект System.Data.OleDb.OleDbDataReader
//содержит одну или несколько строк;
//в противном случае — значение false.
if (dr.HasRows)
{
toolStripProgressBar1.Value = 0;
while (dr.Read())
{
//Добавляем новую строку в элементы управления, где в качестве источника значения
//указывается имя столбца.
dataGridView1.Rows.Add();
//Наименование агрегата
dataGridView1[«name», dataGridView1.Rows.Count — 1].Value = dr[«Name_Agregat»];
//ID Номер агрегата
dataGridView1[«ID», dataGridView1.Rows.Count — 1].Value = dr[«ID_Agregat»];
//Выводим первые 255 символов анотации
string strTemp = Convert.ToString(dr[«Annotat»]);
if (strTemp.Length > 400)
strTemp = strTemp.Substring(0, 400)+»…»;
dataGridView1[«annotation», dataGridView1.Rows.Count — 1].Value = strTemp;
//Заполняем Типы агрегатов
command2.CommandText = «SELECT * FROM TypeAgregat WHERE ID_TypeAgregat=»+ dr[«ID_TypeAgregat»];
command2.Connection = connection;
OleDbDataReader dr2 = command2.ExecuteReader();
if (dr2.HasRows)
{
dr2.Read();
dataGridView1[«type», dataGridView1.Rows.Count — 1].Value = dr2[«NameType»];
}
dr2.Close();
//Заполняем производителя и страну
String IndexCantry=»»;
command2.CommandText = «SELECT * FROM Manufacturers WHERE ID_Manufacturer=» + dr[«ID_Manufact»];
command2.Connection = connection;
dr2 = command2.ExecuteReader();
if (dr2.HasRows)
{
dr2.Read();
dataGridView1[«fabric», dataGridView1.Rows.Count — 1].Value = dr2[«NameManufacturer»];
//dataGridView1[«cantry», dataGridView1.Rows.Count — 1].Value = dr2[«ID_Сntr»];
IndexCantry =Convert.ToString(dr2[«ID_Сntr»]);
}
dr2.Close();
command2.CommandText = «SELECT * FROM Countries WHERE ID_Country=»+ IndexCantry;
command2.Connection = connection;
dr2 = command2.ExecuteReader();
if (dr2.HasRows)
{
dr2.Read();
dataGridView1[«cantry», dataGridView1.Rows.Count — 1].Value = dr2[«NameCountry»];
}
dr2.Close();
// Размещаем в ячейки превью иллюстрации агрегатов
Image image = new Bitmap(Environment.CurrentDirectory + «\\store\\» + dr[«PathPic»] + «\\» + dr[«PathPic»]+»s.jpg»);
dataGridView1.Rows[dataGridView1.Rows.Count — 1].Height = image.Height;
dataGridView1[«image», dataGridView1.Rows.Count — 1].Value = image;
}
}
}
catch (Exception ex)
{
//Сообщение об ошибке
MessageBox.Show(«Ошибка получения данных: » + Environment.NewLine + ex.ToString());
}
finally
{
//Закрываем соединение с базой данных.
connection.Close();
}
}
private void выходToolStripMenuItem_Click(object sender, EventArgs e)
{
this.Close();
}
private void toolStripButton1_Click(object sender, EventArgs e)
{
}
private void toolStripButton7_Click(object sender, EventArgs e)
{
if (toolStripTextBox1.Visible)
toolStripTextBox1.Visible = false;
else
{
toolStripTextBox1.Text = «Поиск»;
toolStripTextBox1.Visible = true;
}
}
private void tabPage1_Click(object sender, EventArgs e)
{
}
private void MainForm_SizeChanged(object sender, EventArgs e)
{
tabControl1.Width = this.Width — 20;
tabControl1.Height = this.Height — 50 -tabControl1.Top;
dataGridView1.Width = tabControl1.Width — 20;
dataGridView1.Height = tabControl1.Height — 20;
if (dataGridView1.Columns.Count==7)
SetWidthColumnsToGrid(); // Масштабируем таблицу
}
private void toolStripButton1_Click_1(object sender, EventArgs e)
{
}
private void toolStripButton3_Click(object sender, EventArgs e)
{
// Очищаем таблицу-список
dataGridView1.Rows.Clear();
// Заполняем таблицу-список
LoadDataToGrid(«SELECT * FROM Agregats»);
}
private void toolStripStatusLabel1_Click(object sender, EventArgs e)
{
}
private void toolStripButton2_Click(object sender, EventArgs e)
{
//Для выделенных строк создаем новые вкладки и первую делаем ее активной
//Обходим все выделенные строки и создаем вкладки
string tmpString=»»;
foreach (DataGridViewRow row in dataGridView1.SelectedRows)
{
tmpString = Convert.ToString(dataGridView1[«name», row.Index].Value);
if (tmpString.Length > 40)
tmpString = tmpString.Substring(0, 40)+»…»;
TabPage myTabPage = new TabPage(tmpString);
tabControl1.TabPages.Add(myTabPage);
tabControl1.SelectTab(myTabPage);
//Создаем на вкладке браузер и задаем его размеры
WebBrowser MyWebBrowser = new WebBrowser();
tabControl1.SelectedTab.Controls.Add(MyWebBrowser);
MyWebBrowser.Height = tabControl1.SelectedTab.Height;
MyWebBrowser.Width = tabControl1.SelectedTab.Width;
string MyStringURL = Environment.CurrentDirectory + @»\store\»+ dataGridView1[«ID», row.Index].Value + @»\» + dataGridView1[«ID», row.Index].Value + «.htm»;
MyWebBrowser.Navigate(MyStringURL);
}
}
1.2 Руководство пользователя интерактивной специализированной нормативно-справочной базы данных «Машинные технологии промышленного садоводства»
В данном программном документе приведено руководство оператора по применению и эксплуатации программного обеспечения «Интерактивная специализированная нормативно-справочная база данных «Машинные технологии промышленного садоводства»».
В данном программном документе, в разделе «Назначение программы» указаны сведения о назначении программы и информация, достаточная для понимания функций программы и ее эксплуатации.
В разделе «Условия выполнения программы» указаны условия, необходимые для выполнения программы (минимальный состав аппаратных и программных средств и т.п.).
В данном программном документе, в разделе «Выполнение программы» указана последовательность действий оператора, обеспечивающих загрузку, запуск, выполнение и завершение программы, приведено описание функций, формата и возможных вариантов команд, с помощью которых оператор осуществляет загрузку и управляет выполнением программы, а также ответы программы на эти команды.
В разделе «Сообщения оператору» приведены тексты сообщений, выдаваемых в ходе выполнения программы, описание их содержания и соответствующие действия оператора (действия оператора в случае сбоя, возможности повторного запуска программы и т.п.).
1.2.1 Назначение программы
Функциональное назначение программы
Программное обеспечение «Интерактивная специализированная нормативно-справочная база данных «Машинные технологии промышленного садоводства»» (ИСНСБД «Машинные технологии промышленного садоводства») используется для систематизации, поиска и хранения информации о техники для садоводства.
Эксплуатационное назначение программы
Программное обеспечение может эксплуатироваться на предприятиях любого масштаба для обеспечения корректных и актуальных справочных данных, устранения несогласованности в действиях различных подразделений и упрощения принятия управленческих решений.
Конечными пользователями программы должны являться сотрудники профильных подразделений.
- централизованное управление справочниками, классификаторами и другими документами;
- возможность централизованного контроля всех нормативно-справочных данных (при хранении, использовании или изменении);
- возможность изменения состава справочников, их структуры без модернизации программного кода системы;
- обеспечение возможности поиска документа по фрагменту в одном из параметров;
- реализация функции сортировки документов по возрастанию и убыванию одного из заданных параметров;
- реализация возможности фильтрации (отбора) документов по заданным параметрам;
- обеспечение возможности сохранения выбранных документов на жесткий диск компьютера;
- обеспечение возможности вывода на печать выбранных документов;
- протоколирование различных событий программы;
- работа с «профилями» настройки программы;
- обеспечение разграничения прав пользователей системы.
1.2.2 Условия выполнения программы
Минимальный состав аппаратных средств
IBM-совместимый персональный компьютер (ПЭВМ), включающий в себя:
- процессор с тактовой частотой, 2.5 ГГц, или выше;
- оперативную память объемом, 2 Гб, или выше;
- жесткий диск объемом 128 Гб, и выше;
- монитор с разрешением экрана не менее 1024 x 768 пикселей.
Минимальный состав программных средств
Программа работает под управлением ОС Windows 8.1/10. Для функционирования модуля СУБД необходимо установленное программное обеспечение MS Access 2003 – 2016.
Требования к персоналу (пользователю)
Конечный пользователь программы (оператор) должен обладать практическими навыками работы с графическим пользовательским интерфейсом операционной системы, иметь квалификацию «Пользователь ЭВМ».
1.2.3 Выполнение программы
Загрузка и запуск программы
Для запуска программы ИСНСБД «Машинные технологии промышленного садоводства» необходимо выбрать соответствующий пункт из меню «Пуск» ОС Windows или ярлык расположенный на рабочем столе. После этого откроется окно. В данном окне отображается прогресс загрузки различных модулей системы. После окончания загрузки откроется главное окно программы.
В данном окне на основании настроек по умолчанию осуществляется вывод документов интерактивной специализированной нормативно-справочной базы данных в форме таблицы со следующими столбцами:
- изображение для предварительного просмотра объекта ИСНСБД «Машинные технологии промышленного садоводства»;
- наименование модели объекта;
- тип объекта;
- краткое описание объекта;
- наименование предприятия изготовителя;
- наименование страны предприятия изготовителя.
В верхней части окна расположено меню команд и панель инструментов, которая дублирует основные команды меню.
Кнопки панели инструментов имеют следующие функции:
| 1 |  |
— обеспечивает заполнение таблицы объектами с критерием отбора «по умолчанию»; |
| 2 |  |
— обеспечивает сохранения информации с активной вкладки главного окна; |
| 3 |  |
— выводит на печать информацию с активной вкладки главного окна; |
| 4 |  |
— закрывает все вкладки главного окна, кроме вкладки с результатами отбора; |
| 5 |  |
— выводит выбранные документы в отдельных вкладках; |
| 6 |  |
— производит сортировку объектов таблицы по возрастанию; |
| 7 |  |
— производит сортировку объектов таблицы по убыванию; |
| 8 |  |
— открывает окно, в котором можно задать критерии фильтрации объектов в списке; |
| 9 | — при нажатии на данную кнопку справа от нее появляется текстовое поле для ввода критерия поиска, при повторном нажатии по данной кнопке поле скрывается; | |
| 10 |  |
— обеспечивает переход в режим настройки программы и заполнения БД; |
| 11 |  |
— выводит информацию о программе. |
1.2.4 Выполнение программы
Для просмотра развернутой информации о любом объекте в таблице результатов отбора необходимо произвести двойной щелчок левой кнопкой мыши (ЛКМ) в первой ячейке соответствующей строки. Альтернативный вариант выбора – выделить любую ячейку нужной строки клавишами управления курсором и нажать клавишу Enter. После выполнения данных операций в отдельной вкладке откроется соответствующий документ (рис. 1.4.):

Рисунок 1.4.
Перейдя на вкладку документа можно сохранить документ на жесткий диск или иной носитель информации, а также вывести его на печать.
Можно выделить несколько строк таблицы и нажав кнопку 5 открыть соответствующие документы в отдельных вкладках.
Вкладку с документом можно закрыть двойным щелчком ЛКМ на названии вкладки. Для закрытия всех вкладок с документами необходимо нажать кнопку 4.
Для отображения в таблице объектов, удовлетворяющих определенным критериям можно воспользоваться функцией поиска, которая активируется нажатием на кнопку 9. После нажатия на данную кнопку справа от нее появляется текстовое поле ввода поискового запроса. Запрос применяется к активному столбцу и может содержать фрагмент текста. После ввода поискового запроса необходимо нажать на кнопку Enter. Результаты отбора отобразятся на вкладке результатов отбора.
Для отображения всех строк таблицы необходимо нажать на кнопку 1.
Для фильтрации содержимого таблицы по нескольким критериям необходимо нажать кнопку 8, в результате откроется окно (рис. 1.5.):
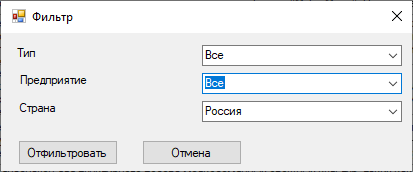
Рисунок 1.5
В данном окне необходимо из выпадающих списков для каждого параметра отбора необходимо установить значение и нажать кнопку Отфильтровать.
В программе реализованы возможности сортировки по выбранным параметрам по возрастанию или по убыванию значений. Для этого необходимо выделить нужный столбец таблицы и нажать на кнопку 6 или 7.
Для перехода к настройкам программы необходимо нажать кнопку 10, в результате отобразится окно авторизации (рис. 1.6.):
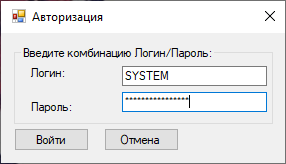
Рисунок 1.6.
В случае успешной авторизации откроется окно настроек (рис. 1.7.):
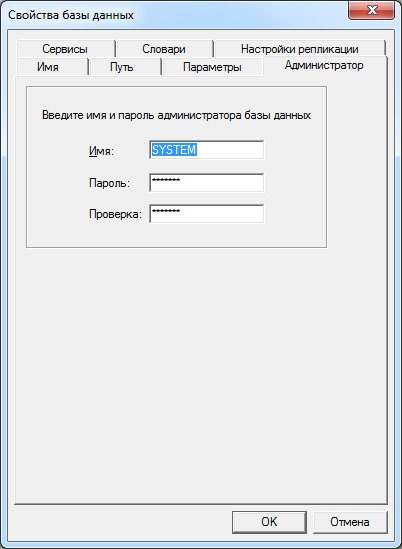
Рисунок 1.7
В данном окне можно: сменить пароль для доступа к настройкам, задать параметры начального отображения списка и цветовой профиль, указать путь к файлам хранилища, выбрать базу данных, редактировать справочники, установить настройки обновления программы.
При нажатии на кнопку 11. выводится информация о программе.
В данном окне отображается информация о названии программного продукта, его версии, дате релиза, а также информация о разработчике.
Для завершения работы с программой необходимо выбрать из меню Файл команду Выход или использовать стандартные средства рабочего окна операционной системы, расположенные в правой части заголовка программы (рис.1.8).

Рисунок 1.8.
1.2.5 Сообщения оператору
В ходе выполнения программы для обеспечения интерактивного взаимодействия с оператором программа выводит различные сервисные сообщения, содержание которых и варианты реакции на них оператора были рассмотрены в главе 1.2.3 данного документа.
1.3 Структура базы данных
Каждая группа и категории машин занимают свою определенную нишу в сфере механизации процессов и операций производства плодово-ягодной продукции.
Характер и уровень механизации технологических процессов и операций в промышленном садоводстве в основном зависит от размера садоводческих плантаций, принятой технологии возделывания и уровня интенсификации производства, ну и конечно от финансовых возможностей хозяйств.
По доступному уровню технической оснащенности отечественные садоводческие хозяйства можно разделить на условные размерные группы:
- мелкотоварные (до 10 га насаждений);
- среднетоварные (10-40 га насаждений);
- специализированные хозяйства (40-100 га насаждений);
- высокоспециализированные хозяйства (свыше 100 га насаждений).
В разделе в основном приводятся ссылки на машины и орудия, производимые в рамках Союзного Государства (РФ и РБ), а также техника зарубежных фирм активно позиционирующиеся на отечественном рынке и не имеющих отечественных аналогов.
Весь спектр технического обеспечения технологических операций в промышленном садоводстве условно разделяется на следующие группы по функциональному назначению:
- Энергетические средства;
- Машины для раскорчевки и утилизации садовых насаждений;
- Машины для подготовки почвы под закладку садовых насаждений;
- Машины и приспособления для обустройства опорных конструкций;
- Машины для посадки плодовых и ягодных растений;
- Машины для содержания почвы в саду и ягодных плантаций;
- Машины для химической защиты растений и внесения удобрений;
- Машины и оборудование для полива и внесения подкормок;
- Машины для ухода за кроной плодовых деревьев и управления продукционными процессами;
- Машины для ухода за маточниками и питомниками;
- Машины для уборки и транспортировки урожая;
- Машины для товарной обработки плодов и ягод;
- Дополнительное и вспомогательное оборудование.
Энергетические средства.
В качестве энергетических средств для механизации работ садоводстве и питомниководстве в основном используются тракторы, снабженные передней и задней навеской, задним и передним валом отбора мощности. Также, особенностью садовых тракторов является возможность реверсивного управления (для работы с вилочными и грейферными погрузчиками), герметичность кабины (для работы с опрыскивателями) и малые габаритные размеры по ширине (не более 1,65 м). Основным параметром типажирования тракторов является их тяговый класс и эксплуатационная мощность.
Ниже представлены основные типы тракторов, используемых в садоводстве и питомниководстве.
Малогабаритные тракторы одноосные (мотоблоки) – тягового класса 0,1-0,2 (с тяговым усилием 0,3-5,4 кН и эксплуатационной мощностью 3-16 кВт). В основном используются при выполнении операций в маточниках и питомниках с пешеходным управлением, а также на транспортных работах небольших объемов. Данный тип тракторов отличаются достаточно большим разнообразием типов и марок.
Малогабаритные тракторы двухосные (минитракторы) – тягового класса 0,2-0,6 (с тяговым усилием 5,4-8,1 кН и эксплуатационной мощностью 16-32 кВт). Рекомендуются для выполнения широкого спектра технологических операций на мелкоконтурных участках и транспортных работах. Из всей гаммы тракторов Союзного государства наиболее популярны минитракторы Беларус-132Н и МТЗ-320.
Колесные тракторы общего назначения – тягового класса 0,6-1,4 (с тяговым усилием 8,1-18 кН и эксплуатационной мощностью 32-94 кВт). Рекомендуются для выполнения широкого спектра технологических операций в специализированных садоводческих и на питомниководческих хозяйствах. Наиболее популярны российские тракторы типа ВТЗ-20-27/32/48 (являющиеся модернизацией Т-25/30) и белорусские тракторы типа МТЗ-892, 921, 952, 1221. Из зарубежных, наибольшее распространение получили тракторы John Deer, New Holland, Same, Ferrari и др., большинство которых имеет реверсивное управление и весьма комфортные условия в кабине.
Колесные и гусеничные тракторы общего назначения – тягового класса 2 (с тяговым усилием 18-27 кН и эксплуатационной мощностью до 150 кВт для колесных и до 94 кВт для гусеничных тракторов). Здесь наиболее популярны гусеничные тракторы типа ДТ-75, которые в основном используются на операциях посадки и выкопки саженцев.
Высококлиренсные энергетические средства (ВЭС) – тягового класса 0,6-0,9 (с тяговым усилием 8,1-12,6 кН и эксплуатационной мощностью до 94 кВт). Данные тракторы имеют высокий клиренс до 1,5 м и применяются при выполнении технологических операций в плодовых и декоративных питомниках. В отечественных ВЭС в качестве энергетического модуля используются серийные тракторы – ВТЗ-2048А для высококлиренсного энергетического средства ВЭС-45 и МТЗ-320 для высококлиренсной платформы ВП-1,5. Привод на задние колеса у данных ВЭС осуществляется через бортовые редукторы. Зарубежные ВЭС в большинстве случаев выполнены полноприводными и в качестве привода используются высокомоментные регулируемые гидромоторы или мотор-колеса, что предопределяет большую мощность энергоблока и сложную систему синхронизации.
Машины для раскорчевки и утилизации садовых насаждений
В настоящее время к технологиям раскорчевки старых экстенсивных садов добавились технологии раскорчевки и утилизации садов интенсивного типа, выведенных из эксплуатации.
Раскорчевка старых садов экстенсивного типа может проводиться по традиционной сплошной и раздельной технологиям.
При сплошной технологии для корчевания деревьев и пней и их удаления за пределы участка используют тяжелые мелиоративные тракторы типа Т-130М с корчевателями типа КТ-3 и МП-8. Утилизация раскорчеванных деревьев производится путем их сжигания.
При раздельной технологии предварительно утилизируется надземная часть путем спиливания деревьев и их измельчения в древесную щепу стационарными рубительными машинами типа МР-25/40 (ПО «Минский тракторный завод») или НЕМ-420D (JENZ GmbH), установленных на передвижных платформах, а также широким диапазоном различных типов измельчителей и дробилок (например Vermeer, Pezzolato, Bandit и др.)
В случае слабой древесно-кустарниковой растительности на участке используют кусторезы типа КБ-4А, Д-514А, ДН-24 или лесные мульчеры прямого действия типа MINIFORST SEPPI в агрегате с тракторами типа МТЗ-82.
Оставшиеся пни корчуют машинами Амкодор 332С с лаповым захватом или 342С.62 или легкими экскаваторами с установленными на них корчевательными адаптерами-клыками.
При рядном расположении пней могут использоваться корчеватели пней типа КП-2, обеспечивающие «non stop» (непрерывный процесс) раскорчевку.
Технология раскорчевки и утилизации интенсивного сада предусматривает предварительное удаление столбов и шпалер, которое осуществляется насадкой-перфоратором с захватом для столба, установленной на легкий экскаватор.
Извлечение оставшихся в почве корней и древесно-растительных остатков и их последующее удаление с участка осуществляется рыхлителями-вычесывателями типа РВ-3, корчевательной бороной типа К-1, навесными кустарниковыми граблями типа К-3.
В последнее время, для утилизации древесно-растительных остатков, набирают популярность универсальные фрезы-ротоваторы, которые производят измельчение древесно-растительных остатков с их одновременной заделкой в почву до 25 см. Здесь можно выделить итальянские ротоваторы 1FSD-220.32 AGRI-WORLD и мульчеры-ротоваторы MULTIFORST SEPPI, а также отечественную машину органического земледелия МОЗ-2.
Машины для подготовки почвы под закладку садовых насаждений
Подготовка почвы под закладку садовых насаждений включает операции глубокого рыхления, щелевания, планировку поверхности, внесение органических и минеральных удобрений, плантажную вспашку, дискование, культивацию, комбинированную, фрезерную и финишную обработку почвы.
Глубокое рыхление почвы на глубину до 80 см выполняют рыхлителем типа РН-80Б в агрегате с трактором Т-130М.
Щелевание и рыхление почвы на глубину до 45 см осуществляют чизельными плугами ПЧ-3,5/4,5 или рыхлителями-вычесывателями РВ-3 в агрегате с тракторами тягового класса 30 и 50 кН.
Планировку и выравнивание поверхности выполняют планировщиками П-28, ДЗ-602А, бульдозерами Д-492А и Д-533С в агрегате с тракторами Т-130М. Используют также тракторные грейферы (например фирмы MONTEFIORI) и другие машины и приспособления.
Поверхностное внесение твердых минеральных удобрений в гранулированном и кристаллическом виде производится агрегатом для внесения удобрений АВУ- 0,8, навесными и прицепными разбрасывателями твердых минеральных удобрений Л-116, РУМ-0,3/0,4/0,5С, или ММТ-4-У.
Поверхностное внесение твердых органических удобрений производится прицепным разбрасывателем типа ПРТ-7.
Поверхностное внесение жидких минеральных удобрений производится машинами ПЖУ-2,5, ПЖУ-5 в агрегате с тракторами тягового класса 1,4 – 2,0. Жидкий аммиак вносят агрегатом типа АБА-0,5М.
Плантажная вспашка на глубину до 45 см обеспечивается однокорпусными навесными плантажными плугами типа ППН-40, ППУ-50 или FS1/98 в агрегате с тракторами тягового класса не ниже 3,0 и мощностью более 100 л.с.
Выравнивание и поверхностное рыхление после плантажной вспашки производят тяжелыми полевыми дисковыми боронами БДТ- 7/10 или дискаторами БДМ (трактор класса тяги 3,0 и 5,0). В этих же целях используют полевые лаповые культиваторы типа КПЭ-3,8 или чизельные культиваторы типа КЧМ-2,5.
Комбинированная обработка почвы совмещает операции рыхления, поверхностной обработки и выравнивание рельефа почвы, которая проводится комбинированными агрегатами типа АКШ-3,6-0,2.
Фрезерная обработка почвы обеспечивает тщательное рыхление почвы и осуществляется полевыми горизонтальными фрезерными агрегатами типа КФУ-3,2, а также ротоваторами типа 1FSD-220.32 AGRI-WORLD.
Финишную (окончательную) обработку почвы проводят легкими лаповыми или зубовыми культиваторами типа КПС в комбинации с зубовыми боронами типа БЗС-1,0 и катками различного типа.
Машины и приспособления для обустройства опорных конструкций
Обустройство опорных конструкций включает операции бурения ям под столбы и шпалеры, запрессовку столбов и шпалер и окончательный монтаж опорных систем (установка анкеров, закрепление и натяжка шпалерной проволоки).
Механизированное бурение ям под столбы различного диаметра осуществляется тракторными ямобурами и гидробурами или буровым инструментом типа STIHL ВТ-121.
Запрессовка столбов и шпалер в почву производится запресовщиками столбов типа СП-2А и ЗС1Б, навешиваемый на гусеничный трактор класса не менее 2,0 или гидроперфоратором типа REVO TR-P, навешиваемый на легкий экскаватор.
Монтаж опорных конструкций производится бурильными насадками для установки анкеров и машинами типа УНП-6 для разматывания и приспособлениями типа ЛРД-85 для натяжения шпалерной проволоки.
Машины для посадки растений
При посадке черенков, сеянцев и саженцев наибольшее распространение получили технологии прямой посадки (механизированная посадка) и технологии с предварительным обустройством посадочных мест (ям, щелей, борозд, канав).
В обоих случаях использования технологий посадки проводится предварительная маркировка мест посадки путем нарезания разметочных борозд пропашными культиваторами типа КРН-4,2/5,6 или фиксацией первого прохода посадочного агрегата лазерными теодолитами.
Механизированная посадка производится питомководческими и садовыми сажалками, которые совмещают операции нарезания посадочной борозды (канавы), подачи и фиксации растений в посадочное место, заделки корневой системы и уплотнения почвы в месте посадки.
Здесь наибольшее распространение получили отечественные питомниководческие сажалки типа СПУ-1, СПУ-4 и садопосадочные машины типа МПС-1 и СНС-1, в которых подача и фиксация растений в месте посадки осуществляется оператором-сажальщиком. Отличительной особенностью посадочных машин такого типа является наличие пассивного ножа-сошника для обустройства посадочного места, что обуславливает их значительное тяговое сопротивление. Данный факт требует тщательной предварительной подготовки почвы на глубину посадки и использования гусеничных тракторов тягового класса 3,0 типа ДТ-75М, оборудованными ходоуменьшителями.
В питомниководческих сажалках OLIVER и садовых сажалках DAMCON посадочные борозды и канавы нарезаются фрезерными рабочими органами, что предопределяет использование менее энергонасыщенных тракторов.
Предварительное обустройство посадочных мест с последующей ручной посадкой растений производится ямокопателями и ямобурами различного конструктивного исполнения (например – КЯУ-100, БМ-300, БС-500 и др.), а также бороздонарезчиками типа БР-1, БР-2, БР-4. Обустройство посадочных канав в случае предварительно установленных опорных конструкциях используют плужные и фрезерные выносные секции фирмы Industrias David и других компаний.
После посадки и фиксации растений используют загортачи для заделки корневой системы и прикатывающие приспособления для уплотнения места посадки.
Машины для содержания почвы в саду и ягодных плантаций
Способы и системы содержания почвы в саду должны обеспечивать накопление гумуса, улучшение физических свойств и пищевого режима плодовых растений, оптимальный водно-воздушный режим, предупреждать эрозию почв, повышать урожайность, качество плодов и экономическую эффективность их производства.
В зависимости от принятой системы содержания почвы применяются следующие технологические операции: обработка почвы в междурядьях; залужение междурядий; скашивание травы в междурядьях и измельчение веток после обрезки; механическая обработка приствольных полос и межствольного пространства; гербицидная обработка приствольных полос и межствольного пространства.
Обработка почвы в междурядьях включает технологические приемы вспашки, дискования, культивации, фрезерования и боронования.
Вспашку почвы выполняют 3-х или 4-х корпусными плугами, например Л-108, ПЛН-3-35, ПС-4-30 или плугом-лущильником ПЛС-5-25 в агрегате с тракторами класса 2,0 – 3,0.
Эффективно чередование вспашки с дискованием тяжелыми дисковыми боронами БДСТ-2,5/3,5 или дискаторами типа БДН с различной шириной захвата.
Культивацию и фрезерование почвы проводят навесными лаповыми культиваторами типа КСМ-2 или КСН-4 с тракторами класса тяги 1,4-2,0 и фрезерными агрегатами типа КФУ-3,2. В последнее время агрегаты с лаповыми и фрезерными культиваторами оснащаются системой внесения жидких удобрений.
Боронование проводят зубовыми боронами типа БЗС-1,0, ножевыми боронками типа HANKMO и другими типами борон (например, сетчатыми или игольчатыми).
Залужение междурядий проводится путем посева многолетних трав или сидератами травяными сеялками типа СЗТ-3,6.
Скашивание и измельчение травы, сидератов и древесно-растительных остатков производится отечественными косилками-измельчителями семейства КИУ-2А; ИКС-1,5А; КРС-1,5-3, навешиваемых на заднюю навеску тракторов и фронтальными косилками типа КФС-3.
Зарубежная техника отличается огромным разнообразием измельчителей, косилок-измельчителей и мульчировщиков различного конструктивного исполнения и типоразмеров. Здесь можно отметить фирмы KUHN, Industrias David, CABE, Orsi Group S.r.l. и др.
Отличительной особенностью современных конструкций косилок-измельчителей является наличие выносных мульчировочных секций, установка дополнительного приспособления «метла» для удаления опавших листьев и древесно-растительных остатков из приствольной зоны, а также емкости для сбора измельченных древесно-растительных остатков и скошенной травы.
Механическая обработка приствольных полос и подкроновой зоны производится выдвижными ножевыми секциями садовых культиваторов и приспособлением типа ПМП-0,6, а также фрезерными секциями типа ФА-0,76; ФАС-0,7; МПП-1,2; ФСН-0,9Г и дисковыми секциями типа БПР-1 в агрегате с тракторами класса 0,6-1,4.
Зарубежные выносные секции для механической обработки приствольных полос и подкроновой зоны представлены большим типажом машин фирм Calderoni и Industrias David.
Гербицидная обработка приствольных полос и межствольного пространства производится гербицидными опрыскивателями, например Зубр НШ с одно или двухсторонними гербицидными штангами ГШС-0,9; ШГ-1 с защитными кожухами и другими зарубежными аналогами.
Машины для химической защиты растений и внесения удобрений
Внесение удобрений и защита садов, ягодников и питомников от вредителей, болезней и сорняков включает следующие технологические операции: поверхностное внесение органических и минеральных удобрений; защита, листовая и внекорневая подкормка плодовых и ягодных культур; сплошное и локальное внесение гербицидов в приствольные полосы садов.
Поверхностное внесение органических удобрений осуществляется прицепами-разбрасывателями типа РПН-4, РТО-4, РОУ-5, ПРТ-10, 1ПТУ-4.
Поверхностное внесение минеральных удобрений в гранулированном и кристаллическом виде в медурядьях и в приствольную зону осуществляется агрегатами типа АВУ-0,8 и разбрасывателями типа Л-116 и РУМ-0,3/0,4/0,5С.
Защиту растений, листовую и внекорневую подкормку проводят методом обычного (О), малообъемного (МО) и ультрамалообъемного (УМО) опрыскивания. Обычное опрыскивание (размер капли от 300 до 600 микрон) осуществляется традиционными опрыскивателями с применением насосов высокого давления, малообъемное опрыскивание (размер капли от 100 до 300 микрон) осуществляется пневматическими опрыскивателями, ультрамалообъемное опрыскивание (размер капли от 10 до 100 микрон) осуществляется вращающимися распылителями или газогенераторами.
В настоящее время используются отечественные опрыскивателями типа ОПВ-1200, ОП-2000, ОП-1600 и белорусская типоразмерная серия опрыскивателей типа ЗУБР модели ПВ и НВ. Для обеспечения МО и УМО используют распылительные системы типа «Шквал» или «Виктория».
Из зарубежных можно отметить опрыскиватели фирм LOCHMANN PLANTATEC, TECNOMA, SAE-Turbmatic, Martignani и др.
Последнее время набирают популярность туннельные опрыскиватели, например ISK-1 фирмы EKOSAD (Польша), Munckhof tunnel sprayer фирмы Munckhof (Голландия), Tunnelspritze TSG N2 1000 фирмы LIPCO (Германия), а также башенные опрыскиватели, например трехрядный башенный опрыскиватель M.A.S. 3 Row sprayer фирмы Munckhof (Голландия) и др.
Сплошное и локальное внесение гербицидов осуществляется опрыскивателями гербицидными типоразмерной серии ЗУБР-Герби (модификация НШ) или гербицидными штангами типа ГШС-0,9; ШГ-1; ШГ/ДС-2.
Приготовление рабочей жидкости для опрыскивателей и гербицидников используют мобильные агрегаты типа АПЖ-12 или стационарные заправочные станции типа СЗС-10. Транспортировка рабочей жидкости осуществляется заправщиками типа ЗЖВ-3,2; РЖТ-4; МЖТ-8.
Машины для ухода за кроной плодовых деревьев и управления продукционными процессами
Основным аспектом управления продукционными процессами в садоводстве является уход за кроной (обрезка) плодовых деревьев. Основными задачами обрезки являются формирование кроны деревьев и кустарников, обеспечение максимальной продуктивности растений и защиту насаждений от повреждения и от неблагоприятных климатических условий.
Уход за кроной и управление продукционными процессами включают следующие технологические операции: ручная обрезка плодовых деревьев с технологических платформ и с использованием пневмоинструментов; механизированная (технологическая) обрезка; сгребание и выметание обрезанных веток из приствольной полосы; сбор срезанных ветвей и их вынос за пределы сада; измельчение веток в междурядьях сада; прореживание завязей; подрезка корней.
При ручной обрезке используют белорусские навесные платформы типа ПОС-2Н (ООО «СелАгро»), а также прицепные и самоходные платформы-подъемники фирм Damcon, PAZZAGLIA, BILLO и др., с установленными на них компрессорами для подключения пневмосекаторов.
Механизированная (технологическая) обрезка осуществляется агрегатами с использованием дисковых, сегментных и ножевых (чеканочных) режущих аппаратов.
Из отечественной техники наиболее известны контурные обрезчики типа МКО-3, АМС-7 и МКОТС с дисковыми режущими аппаратами (в настоящее время не производятся).
Зарубежные контурные обрезчики отличаются большим разнообразием типов и моделей, например фирмы Industrias David (Испания), RINIERIS R.L. (Италия) и др.
Сгребание и выметание обрезанных веток из приствольной полосы осуществляется метлами различной с гидроприводом, например модель ALH-4EN Industrias David (гидравлическое изменение ширины и высоты, междурядье 3,60-4,60 м) или выгребатель веток садовый MCMS производства ООО «СелАгро».
Сбор срезанных ветвей и их вынос за пределы сада осуществляется садовыми волокушами типа ВСН-2,5 и сборщиками ветвей СВ-1А.
Измельчение веток в междурядьях сада осуществляется отечественными измельчителями и мульчерами типа КРС-2,4; МОЗ-2; KG 180 и ИКС-1,5А, навешиваемых на заднюю навеску тракторов.
Зарубежные измельчители отличаются огромным разнообразием моделей и типоразмеров. Здесь можно отметить фирмы KUHN, Industrias David, CABE, Orsi Group S.r.l. и др.
В отдельных случаях измельчители агрегатируются совместно с гидравлическими метлами
Управления продукционными процессами также осуществляется прореживанием завязей, например механический прореживатель завязи DARWIN (Германия) и подрезкой корней, например корнеподрезчик DS-PK/2 (Польша)
Машины для содержания и ухода за маточниками и питомниками
Технологические процессы выращивания посадочного материала плодовых культур в средней полосе России включают этапы выращивания подвойного материала в маточниках вегетативно размножаемых подвоев и выращивание саженцев первого, второго и третьего года развития в плодовых питомниках.
Основными технологическими операциями по содержанию и уходу за маточниками вегетативно размножаемых подвоев являются: весеннее раскрытие маточных растений; внесение субстрата и удобрений; окучивание маточника; междурядная обработка; ошмыгивание листьев; раскрытие корневой системы маточника и отделение отводков.
Основными технологическими операциями по содержанию и уходу за плодовыми питомниками являются: междурядная обработка; борьба с вредителями и болезнями; зеленые операции и выкопка саженцев.
В настоящее время основной отечественной машиной для работы в маточниках является универсальных комплекс для маточников УКМ, содержащий основной базовый агрегат, который оснащается технологическими модулями, обеспечивающими весеннее раскрытие маточных растений; окучивание маточника; междурядную обработку; ошмыгивание листьев; раскрытие корневой системы маточника и отделение отводков.
Поверхностное внесение субстрата и твердых органических удобрений производится прицепным разбрасывателем типа ПРТ-7, которые оснащаются специальными направителями.
В плодовых питомниках междурядную и химическую обработку проводят высококлиренсными культиваторными, фрезерными и гербицидными секциями, устанавливаемыми тракторы типа ВЭС-45 или ВП-1,5.
Для выкопки саженцев используют отечественный выкопочный плуг пассивного типа ВПН-2М, выкопочный плуг ВПС-2 со встряхивающим механизмом, зарубежные копатели вибрационного типа или выкопочные комбайны, например фирмы DAMCON.
Машины для уборки и транспортировки плодов и ягод
Механизированная уборка и транспортировка плодов в основном включает следующие технологические операции: комбайновую уборку косточковых плодов и ягод; съём семечковых плодов с передвижных и стационарных плодоуборочных платформ; подбор опавших плодов (падалицы), внутриквартальные перевозки, погрузочно-разгрузочные операции; транспортировку к местам хранения.
Для уборки опавших плодов используют машины и приспособления для встряхивания плодов, например машины типоразмерного ряда фирмы Feucht-Obsttechnik, а также агрегаты и комбайны для подбора плодов фирм Feucht-Obsttechnik и ООО «СелАгро».
Для сбора плодов в труднодоступной зоне верхнего яруса используются белорусские навесные платформы типа ПОС-2Н (ООО «СелАгро»), а также прицепные и самоходные платформы-подъемники фирм Damcon, PAZZAGLIA, BILLO и др.
Наиболее перспективным направлением в уборочных операциях является использование самоходных плодоуборочных платформ-комбайнов, обеспечивающих сбор плодов с нижнего и верхнего ярусов с одновременной укладкой в контейнеры. В настоящее время наиболее популярны плодоуборочные платформы-комбайны типа белорусской АСУ–6 и иностранных фирм Hermes, ZUCAL и др.
Для уборки косточковых плодов и ягод используют плодоуборочные и ягодоуборочные комбайны, например: машину ВУМ-15А; агрегат для уборки ягод АУС-8; полурядный прицепной комбайн Иоанна-механический и Иоанна-2-гидравлический; прицепной ягодоуборочный комбайн USK-1 Jovaras; самоходный смородиноуборочный комбайн Joonas-1500; комбайн для уборки смородины, крыжовника, аронии JAREK-5; комбайн для уборки малины NATALIA; комбайн для уборки вишни FELIX и др.
Для уборки земляники и других низкорастущих культур используют платформу УНК-1.
При поточно-контейнерном способе уборки, внутриквартальных перевозок и транспортировки к местам хранения используют контейнеровозы-транспортировщики типа ВУК-3М, ТКС-1,5, ТТК-3 и многочисленный ассортимент транспортировщиков-контейнеровозов иностранных фирм, например AGROFER и др.
Погрузочно-разгрузочные операции осуществляют различными отечественными вильчатыми погрузчиками, устанавливаемые на реверсивные тракторы, типа ПВСВ-0,5; ПВ-750. Для опорожнения контейнеров используется приспособление типа ОКП-6 или КО-1. Из зарубежных вилочных погрузчиков можно отметить типоразмерный модельный ряд фирмы BARGAM.
Оборудование для товарной обработки плодов и ягод
Товарная обработка плодов и ягод проводится для подготовки к реализации и длительному хранению. Предварительный процесс товарной обработки плодов и ягод включает операции перегрузки и опорожнения контейнеров, сортировки, калибровки и упаковки.
Перегрузка и опорожнение контейнеров с плодово-ягодной продукцией осуществляется контейнероопрокидывателями типа КО-1 или HD 1211, контейнероразгрузчиком КР-1в агрегате со складскими вильчатыми аккумуляторными погрузчиками типа ЭП-103, АВ-701.
Ручная сортировка и упаковка плодов производится на столах и линиях типа СП-1, ЛТО-3А и ЛТО-6.
Автоматизированная сортировка по интенсивности окраски и калибровки по размеру и весу яблок и груш производится на сортировочных линиях типа Greefa А3/UP, Greefa MSE 2000 с программным обеспечением и Perfect MGS, EGS, OMS 2-250, OMS 4-470 (Голландия).
Дополнительное и вспомогательное оборудование для промышленного садоводства
Для снижения стрессовых погодных нагрузок (защита от заморозков и перегрева) в садах и ягодных плантациях используются вентиляторные установки от ООО «Босманика».
Вызывает интерес оборудование для отпугивания птиц от фирмы KURTBOMSAN.
2. НАПРАВЛЕНИЕ «СЕНСОРНЫЕ ТЕХНОЛОГИИ В ПРОМЫШЛЕННОМ САДОВОДСТВЕ»
2.1 Обзор и анализ технологий по беспроводному сбору данных в целях использования в садоводстве и земледелии
Промышленное интенсивное садоводство характеризуются тем, что сады располагаются на достаточно больших территориях. Для сбора информации с большого количества территориально распределенных датчиков рационально использовать беспроводные каналы связи. При этом крайне желательно, чтобы датчики имели автономное питание и работали бы без замены питания несколько лет.
С помощью таких беспроводных датчиков операторы-технологи смогут получать точные данные в режиме реального времени с участков, на которых они установлены. На основании полученных сведений система управления сможет принимать ключевые решения, например, когда орошать, сколько вносить удобрения, когда собирать урожай и т.д. Организованный подобным образом круглосуточный доступ ко всей необходимой информации сводит к минимуму многочисленные риски и позволяет садоводам принимать более точные решения, причем не только в процессе производства, но и при планировании [6].
С развитием промышленного Интернета вещей все больше устройств оснащаются стандартными сетевыми протоколами. Таким образом, становится возможным самостоятельная обработка данных оборудованием, взаимодействие между устройствами на низовом уровне и обращение к централизованной системе управляющей только по необходимости.
В последние 20 лет возникло множество беспроводных стандартов и сетей, отвечающих требованиям постоянно растущего объема передачи данных между людьми — GSM, GPRS, 3G, LTE, Wi-Max, Wi-Fi, ZegBee и др.
Распределение частот для протоколов беспроводной связи различных технологий Интернета вещей (IOT) ближнего радиуса действия (Short range wireless), Wi-Fi и системы связи дальнего радиуса действия (Longer range wireless) представлено в таблице 2.1 [7].
Таблица 2.1 — Распределение частот для протоколов беспроводной связи IOT
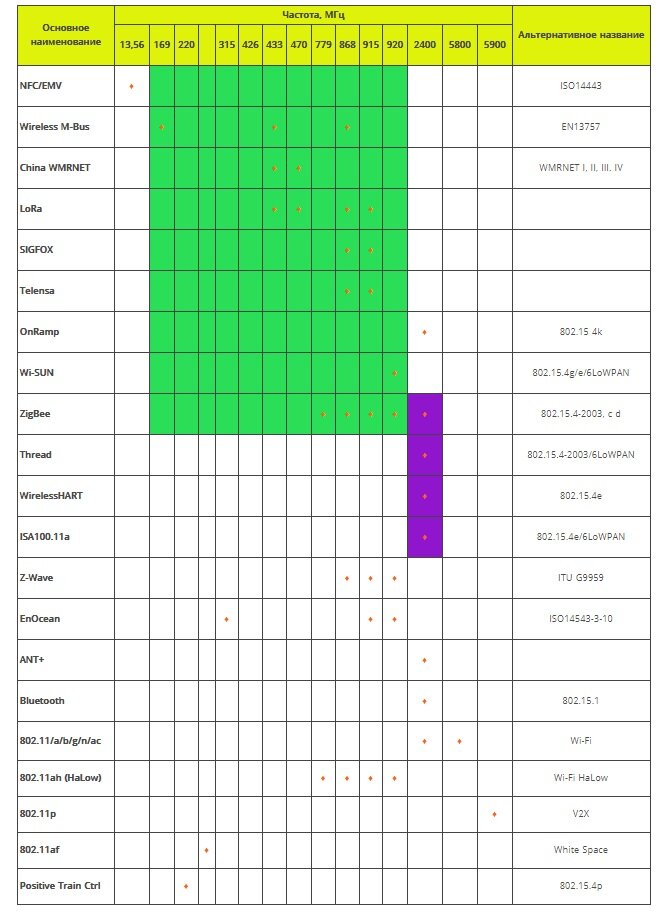
При принятии решения в части использования конкретных стандартов организации беспроводной связи в обязательном порядке необходимо учитывать требования национальных стандартов и тех или иных ограничений, связанных с конкретной областью их применения.
Технологии IOT можно поделить, исходя из радиуса действия [8]:
- Технологии определения присутствия и бесконтактной идентификации.
- Технологии персональных сетей.
- Технологии беспроводных локальных сетей.
- Технологии дальнего радиуса.
На рисунке 2.1 представлены различные технологии в зависимости от радиуса действия.
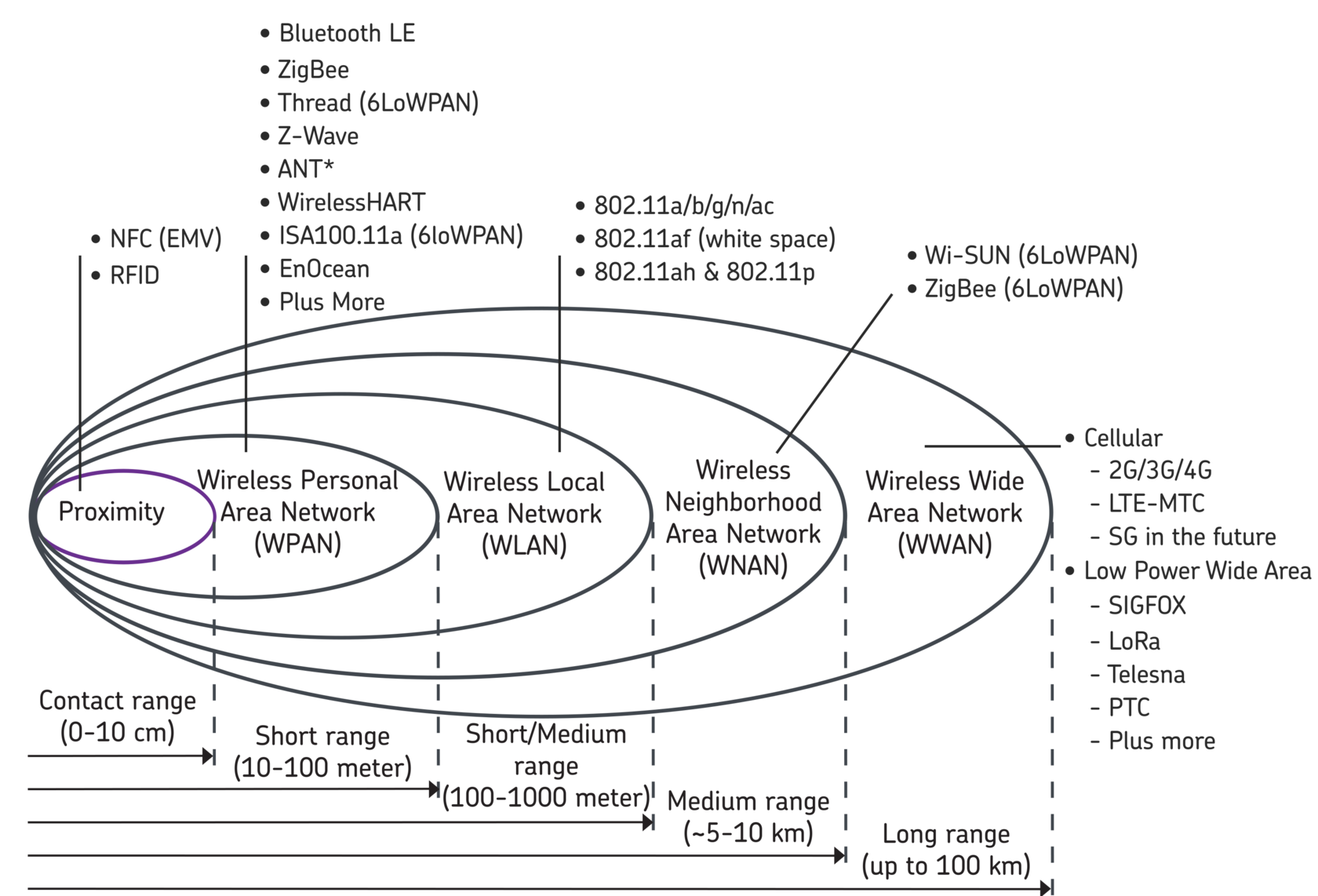
Рисунок 2.1 – Сетевые технологии в зависимости от радиуса действия
Так как в промышленном интенсивном садоводстве осуществляется сбор информации с большого количества территориально распределенных датчиков наибольший интерес для организации беспроводной сети представляют технологии относящиеся к Wireless Neighborhood Area Network (WNAN) и Wireless Wide Area Network (WWAN), так как они обеспечивают дальность приема сигнала порядка нескольких километров.
Кроме радиуса действия необходимо учитывать и другие ключевые аспекты при выборе технологии беспроводного сетевого подключения [9]:
- Частота. Какое проникновение необходимо и какая устойчивость против помех?
- Скорость передачи данных. Какая пропускная способность требуется? Как часто обновляются данные?
- Энергопитание. Устройства работают от сети или аккумулятора?
- Безопасность. Устройства участвуют в работе критически важных приложений?
В таблице 2.2 представлены характеристики различных беспроводных сетевых технологий дальнего радиуса действия.
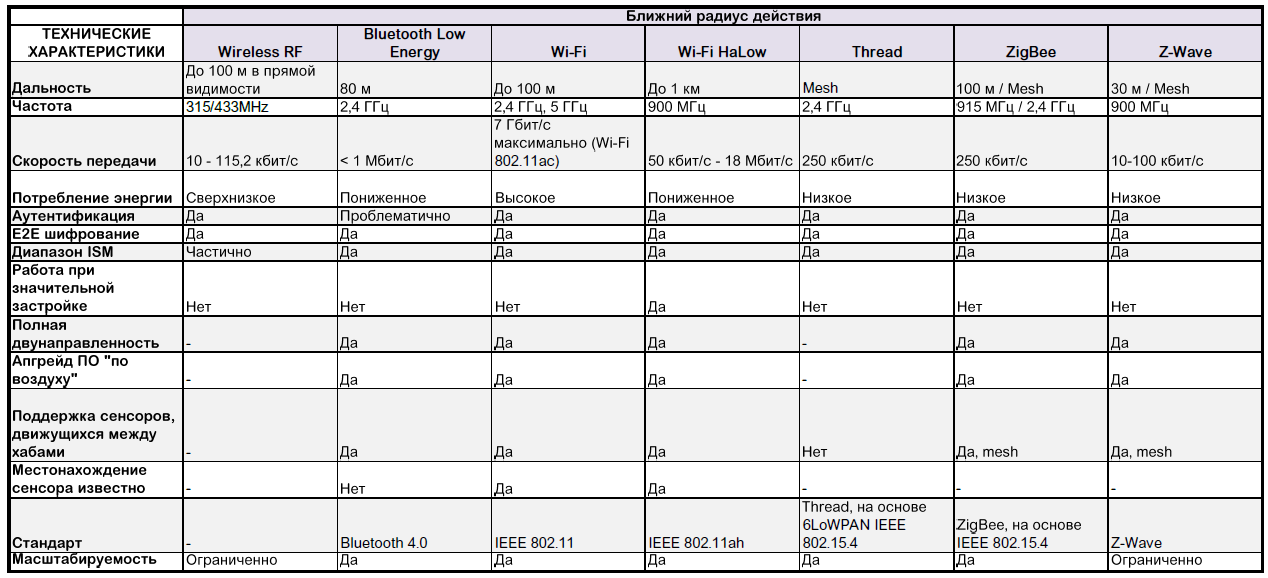
В таблице 2.3 представлены характеристики различных беспроводных сетевых технологий ближнего радиуса действия.
Таблица 2.2 – Характеристика беспроводных сетевых технологий дальнего радиуса действия
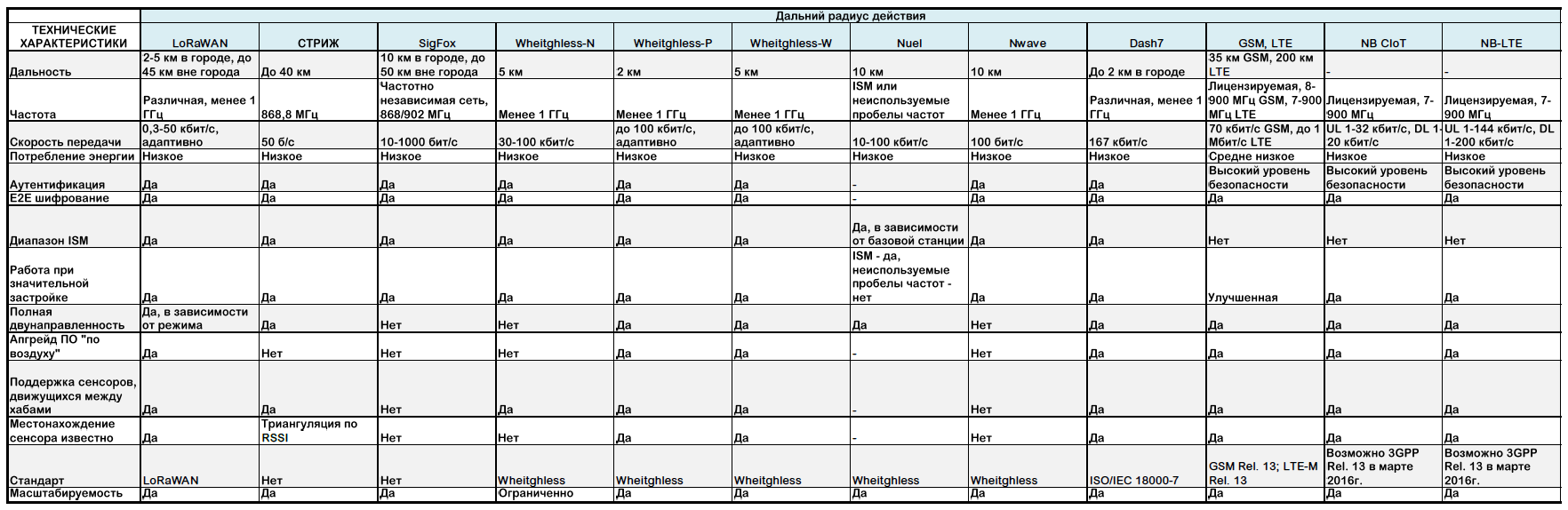
Таблица 2.3 – Характеристика беспроводных сетевых технологий ближнего радиуса действия
Рассмотрим более подробно наиболее популярные беспроводные сетевые технологии.
Ближний радиус действия
Большинство стандартов для беспроводных систем связи ближнего радиуса действия относится к организации т. н. «персональной сети» — той, которая построена «вокруг» человека [10]. Такая сеть в технической литературе иногда сокращенно именуется PAN (Personal Area Networks), хотя для нас более привычны другие названия — например, WLAN (от англ. Wireless Local Area Network — беспроводная локальная сеть). PAN — это сеть передачи данных, объединяющая персональные электронные устройства одного пользователя (телефоны, карманные персональные компьютеры, смартфоны, ноутбуки, беспроводные гарнитуры и т. п.). Обычно такие сети имеют радиус покрытия от 10 до 30 метров (хотя в хороших условиях все они могут обеспечить и большую дальность связи).
Wireless RF
Wireless RF Беспроводные радио (Wireless RF) датчики и исполнительные механизмы дешевы и просты в развертывании. Они характеризуются ультранизким энергопотреблением. Дальность действия составляет до 100 м в прямой видимости и до 500м с внешними антеннами. Работают они обычно на частоте 315 или 433 МГц со скоростью 10 — 115.2 кбит/с и поддерживают AES шифрование 128 бит.
Bluetooth Low Energy (BLE)
Bluetooth Low Energy (BLE) является беспроводной персональной сетевой технологией, разработана и реализуется с помощью Bluetooth Special Interest Group. Bluetooth Low Energy, называемый также Bluetooth Smart (для использования в IoT-устройствах), использует преимущественно протокол BLE, который предназначен специально для устройств со сверхмалым потреблением энергии [10].
В данный момент технология Bluetooth присутствует на всех мобильных платформах, BLE оснащаются миллионы новых устройств. Эта технология хорошо поддерживается и надежна для ближних коммуникаций. Часто применяется для связи между смартфонами и другими персональными, реже домашними электронными устройствами. На этой технологии, в частности, основана технология iBeacon. Благодаря широким возможностям по выбору доступных вариантов протоколов и экономному использованию энергии аккумулятора, технологию Bluetooth можно эффективно применять и принимать как один из основных стандартов беспроводной связи для IoT-устройств. Сокращение затрат энергии на радиосвязь и оптимизация ПО нацелены как раз на то, чтобы сделать десятилетний срок эксплуатации без замены батарей, критичный для IoT, практически достижимым.
Преимущества BLE:
- широкое распространение в мире;
- высокая скорость передачи данных;
- высокая надежность.
Недостатки BLE:
- некоторые проблемы с аутентификацией и приватностью;
- невысокая проникающая способность в городской застройке;
- местонахождение устройства не определяется.
Wi-Fi
Wi-Fi (или WiFi, изначально от англ. Wireless Fidelity) — локальная беспроводная сетевая технология, которая позволяет электронным устройствам подключаться к сети, в основном с использованием частот 2,4 ГГц и 5 ГГц ISM радиодиапазона [9]. Технология развивается Wi-Fi Alliance на базе стандарта IEEE (Institute of Electrical and Electronics Engineers) 802.11. Wi-Fi является зарегистрированной торговой маркой одноименного альянса, в который входит более 600 компаний. Эта технология де-факто стала практически повсеместной, в мире выпускаются миллиарды Wi-Fi устройств в год.
Wi-Fi изначально разрабатывалась для локальной связи. Современные точки доступа со шток-антеннами могут обеспечить радиус действия примерно до 100 м без препятствий. Существуют решения с использованием усилителя и полупараболической антенны с дальностью свыше 20 км.
Эта технология не стоит на месте, постоянно развиваясь. Так, технология Wi-Fi Direct позволяет устройствам Wi-Fi подключаться напрямую без точки доступа и сети. Устройства могут установить соединение друг с другом или с группой из нескольких устройств одновременно. Подключаются Wi-Fi Direct-сертифицированные устройства легко и просто: либо два NFC-совместимых устройства вместе, либо с вводом ПИН-кода. Кроме того, все прямые соединения Wi-Fi защищены WPA2.
Wi-Fi соединения могут быть нарушены или скорость соединения снижена при наличии других подобных устройств в той же области. Многие 2,4 ГГц 802.11b и 802.11g точки доступа по умолчанию работают на одних каналах при первоначальном запуске. Wi-Fi загрязнение может стать проблемой в районах с высокой плотностью, таких как большие жилые комплексы или офисные здания со многими точками доступа Wi-Fi. Кроме того, многие другие устройства используют диапазон 2,4 ГГц: микроволновые печи, ZigBee устройства, устройства Bluetooth, беспроводные телефоны, видеоняни, что может вызвать значительные дополнительные помехи. Это также является проблемой, когда муниципалитеты или другие крупные объекты (такие как университеты) стремятся обеспечить большую зону покрытия Wi-Fi.
Недавно выпущенный Cisco и Apple документ «Enterprise Best Practices for Apple Devices on Cisco Wireless LAN» содержит совместные рекомендации, касающиеся использования в сетях устройств iPhone, iPad, iPod (с операционной системой не ниже iOS 9.0). Как говорится в этом документе, «полоса 2,4 ГГц не считается пригодной для любых бизнес- и/или критичных корпоративных приложений». Для беспроводных сетей, где используются устройства Apple, компаниям рекомендуется пользоваться исключительно частотами 5 ГГц (стандарт 802.11a/n/ac). Тем не менее диапазон 2,4 ГГц пока остается основным, используемым по умолчанию для большинства мобильных устройств, к тому же использование частот 5 ГГц для Wi-Fi разрешено не во всех странах.
Первоначально введенный стандарт шифрования WEP может быть относительно легко взломан даже при правильной конфигурации (из-за слабой стойкости алгоритма). Новые устройства поддерживают более совершенные протоколы шифрования данных WPA и WPA2. Многие организации используют дополнительное шифрование для защиты от вторжения. На данный момент основным методом взлома WPA2 является подбор пароля, поэтому рекомендуется использовать сложные цифро-буквенные пароли для того, чтобы максимально усложнить задачу подбора пароля. Кроме того, стандартами Wi-Fi не предусмотрено шифрование передаваемых данных в открытых сетях. Это значит, что все данные, которые передаются по открытому беспроводному соединению, могут быть прослушаны злоумышленниками при помощи программ-снифферов. Поэтому, при использовании бесплатных хот-спотов не следует передавать в Интернет критически важные данные.
Преимущества Wi-Fi:
- повсеместное распространение в мире;
- гарантированная совместимость;
- высокая скорость передачи данных;
- высокая надежность.
Недостатки Wi-Fi:
- интерференция и помехи;
- некоторые проблемы с безопасностью;
- невысокая проникающая способность в городской застройке;
- высокая энергоемкость;
- диапазон и ограничения в разных странах различны, многие страны требуют регистрации сетей Wi-Fi, работающих вне помещений.
Wi-Fi Ha Low
Ha Low новый стандарт беспроводной связи, предназначенный для работы Интернета вещей. Новый стандарт получил спецификацию IEEE 802.11ah.
Этот протокол работает на нетребующей лицензирования частоте 900 МГц, для обеспечения расширенного диапазона Wi-Fi сетей, по сравнению с обычными сетями Wi-Fi, работающими в диапазонах 2.4 ГГц и 5 ГГц. Его низкое энергопотребление является преимуществом, позволяющим создавать большие группы станций или датчиков, которые взаимодействуют чтобы распространять сигналы, поддерживая концепцию IoT [11]. Низкое энергопотребление протокола конкурирует с Bluetooth и имеет дополнительное преимущество — более высокие скорости передачи данных и более широкий диапазон покрытия [12].
Преимущество протокола 802.11ah заключается в расширенном радиусе действия, что делает его полезным для сельской связи и разгрузки трафика сотовой связи. Другая цель протокола — разрешить использование беспроводных станций 802.11 с низкой скоростью в субгигагерцовом спектре [11]. Протокол является одной из технологий стандарта IEEE 802.11, которая наиболее отличается от модели локальной сети, особенно в отношении коллизий. Важным аспектом протокола 802.11ah является поведение станций, сгруппированных для сведения к минимуму конфликтов в эфире, использование ретранслятора для увеличения радиуса действия, использование небольшого количества энергии благодаря предварительно заданным периодам пробуждения/дремания, по-прежнему можно отправлять данные на высокой скорости при некоторых согласованных условиях и использовать секторные антенны.
Частота 900 МГц заметно увеличивает проникающую способность сигнала в городской застройке, а радиус ее действия будет намного больше, чем у современного беспроводного стандарта, — до 1 километра. В то же время платой за «дальнобойность» является малая мощность сигнала. Пропускная способность Wi-Fi HaLow будет гораздо ниже, чем максимум Wi-Fi 802.11ac (7 Гбит/c), предполагаемая скорость: 50 кбит/с — 18 Мбит/с.
Thread
Thread (от англ. thread — нить) — это протокол среднего уровня, основанный на энергоэффективном беспроводном стандарте 6LoWPAN — стандарте взаимодействия по протоколу IPv6 (новая версия протокола IP с длиной адреса 128 бит вместо 32 в IPv4) поверх маломощных беспроводных персональных сетей стандарта IEEE802.15.4. Технология Thread (в ее логотипе показана суть протокола — сшивание) предназначена для адаптации простых устройств IoT к коммуникации с использованием протокола IPv6, который позволяет осуществлять связь через локальную сеть (LAN) и Интернет. Протокол среднего уровня Thread можно установить поверх других низкоуровневых стандартов. Стандарт предполагает использование самой современной схемы аутентификации и AES-шифрования, позволяющих закрыть дыры в защите, которые существуют в других беспроводных протоколах. При этом безопасность обеспечивается как на уровне сети, так и непосредственно на уровне приложений.
Широкая поддержка «спящего режима» позволяет в течение многих лет эксплуатировать устройства даже от одной батареи AA.
Преимущества Thread:
- дополнение к Wi-Fi;
- разработка специально для домашней электроники;
- надежная самовосстанавливающаяся сеть;
- использование проверенных открытых стандартов;
- высокая безопасность;
- низкое энергопотребление.
Недостатки Thread:
- интерференция и помехи;
- невысокая проникающая способность в городской застройке;
- диапазон и ограничения в разных странах различны, многие страны требуют регистрации сетей Wi-Fi, работающих вне помещений.
ZigBee
ZigBee — спецификация сетевых протоколов верхнего уровня, регламентированных стандартом IEEE 802.15.4, который появился в 2003 году [13]. ZigBee и IEEE 802.15.4 описывают беспроводные персональные вычислительные сети (WPAN, wireless personal area networks). Спецификация ZigBee ориентирована на приложения, требующие гарантированной безопасной передачи данных при относительно небольших скоростях и возможности длительной работы сетевых устройств от автономных источников питания. Технология ZigBee поддерживает не только простые топологии сети («точка-точка», «дерево» и «звезда»), но и самоорганизующуюся и самовосстанавливающуюся ячеистую (mesh) топологию с ретрансляцией и маршрутизацией сообщений.
ZigBee разрабатывается ZigBee Alliance, в который входит более 300 компаний. Альянс также сертифицирует оборудование и устройства. 16 декабря 2015 года Альянс объявил о ратификации ZigBee 3.0, учитывающий современные требования IoT и поддерживающий все предыдущие версии и сотни миллионов уже проданных устройств.
Название стандарта ZigBee происходит от танца медовых пчел после возвращения в свой улей. Эта технология является еще одним удачным решением, которое ориентировано на приложения, требующие гарантированной безопасной передачи данных при относительно небольших скоростях. Она обеспечивает возможность длительной работы сетевых устройств от автономных источников питания (батарей). Сети, образованные по протоколу ZigBee, начали привлекать внимание еще с 1998 г., когда многие разработчики осознали, что протоколы Wi-Fi и Bluetooth стали недостаточно эффективными для целого ряда приложений. В частности, многие инженеры увидели необходимость в самоорганизующихся сетях ad-hoc (ad-hoc — латинское выражение, означающее «специально для этого»). В такой одноранговой сети узлы могут связываться напрямую, точка-к-точке, без потребности в общей точке доступа. Технология ZigBee использует радиочастоты не требующего лицензирования ISM-диапазона, включая полосу в районе 2,4 ГГц. Однако в разных регионах и странах для этого стандарта связи применяются разные полосы рабочих частот: так, в США для ZigBee выделена полоса в субгигагерцовом диапазоне, включающем 915 МГц, в Китае это 784 МГц, а в Европе — 868 МГц. В России ZigBee используется в частотном диапазоне 2400-2483,5 МГц и также не требует получения частотных разрешений и дополнительных согласований. Протокол ZigBee изначально поддерживает сетевые соединения типа «дерево», «звезда» и самоорганизующейся сети с ячеистой топологией, предназначенные для решения самого широкого круга задач. Подключенные таким образом устройства для управления узлами могут передавать данные через каналы связи в сеть, что делает технологию ZigBee более привлекательной (по сравнению с сетью «точка-точка» в аналогичных условиях) для организации сетей с низкой скоростью передачи данных, распределенных по большой площади.
Плата за все преимущества ZigBee — это сокращение времени автономной работы устройств, которые служат репитерами кластеров такой сети, используемых в процессе обмена данными с более удаленными IoT-устройствами. Ускоренное истощение энергии батарей связано с тем, что устройствам приходится передавать не только свои собственные данные и подтверждения между узлами сети, но также данные и подтверждения с других устройств. Что же касается помехозащищенности, то хотя расширенная спецификация от 2007 г., получившая название ZigBee Pro, предоставляет возможность использования технологии с перескоком частоты, однако в этом случае при наличии помех переходить на другой канал должна сразу вся сеть. Если говорить о скорости передачи, то в зависимости от области применения устройства она может находиться в диапазоне от 10 до 200 Кбит/с.
Более низкие скорости обычно означают и более экономное использование энергии батареи, которая расходуется на процессоры, логические микросхемы и, конечно, передачу. Характерная для данной области применения и диапазона частот низкая скорость передачи данных при нечастых обновлениях данных может обеспечить устройству более длительный срок службы батареи. В настоящее время технология Zigbee используется во многих приложениях самого различного назначения, которые требуют подключения с малым расходом потребляемой мощности, включая домашнюю автоматизацию и промышленные сети. Например, замок «без ключа» на входной двери и регулятор температурного режима вполне могут быть устройствами ZigBee.
Преимущества ZigBee:
- способность к самоорганизации и самовосстановлению;
- простота развертывания;
- высокая помехоустойчивость;
- высокая безопасность;
- нелицензируемые частоты;
- низкое энергопотребление (в том числе режим «сна» для устройств).
Недостатки ZigBee:
- невысокая скорость;
- большая часть трафика тратится на передачу пакетов, содержащих адресную информацию, информацию по синхронизации и т.п.;
- невысокая проникающая способность в городской застройке;
- недостаточно высокий уровень стандартизации и отсутствие единой программно-аппаратной платформы для разработки сложных приложений.
Z-Wave
Z-Wave — запатентованный беспроводный протокол связи, разработанный в основном для домашней автоматизации [14]. Технология использует маломощные и миниатюрные радиочастотные модули, которые встраиваются в бытовую электронику и различные устройства. Z-Wave работает в диапазоне частот до 1 ГГц и оптимизирован для передачи простых управляющих команд с малыми задержками. В основе решения Z-Wave лежит самоорганизующаяся ячеистая сеть (mesh сеть), в которой каждый узел или устройство может принимать и передавать управляющие сигналы другим устройствам сети, используя промежуточные соседние узлы.
В Z-Wave используется FSK- или GFSK-модуляция, и хотя эта технология изначально была запатентована, в настоящее время она является общедоступной открытой спецификацией ITU G.9959.
Преимущества Z-Wave:
- разработка специально для домашней электроники;
- способность к самоорганизации и самовосстановлению;
- простота развертывания;
- высокая помехоустойчивость;
- высокая безопасность;
- нелицензируемые частоты;
- отсутствие интерференции с многочисленными устройствами на 2.4 ГГц;
- низкое энергопотребление.
Недостатки Z-Wave:
- невысокая скорость;
- для решений с потребностью более 30 устройств, Z-Wave начинает становиться более дорогим, чем кабельные системы;
- невысокая проникающая способность в городской застройке;
- платежи Sigma Designs как владельцу технологии.
Дальний радиус действия
Существует множество приложений, в которых технология IOT требует значительно больших дальности связи и зон покрытия одиночными устройствами. Такие сети с ограниченной мощностью и большим покрытием часто упоминаются под аббревиатурой LPWAN (англ. Low-power Wide-area Network — энергоэффективная сеть дальнего радиуса действия) [15]. Области применения этих сетей включают: медицину (мониторинг состояния пациентов амбулаторно и на дому), мониторинг ресурсов (контроль качества воды, добыча нефти и полезных ископаемых), индустрию (мониторинг и контроль на предприятиях, рассредоточенных на больших площадях), сельское хозяйство (здоровье и местонахождение животных, погода, состояние растений и водопользование). Также они используются в системах «умного города» (транспорт, парковка, качество воздуха, учет коммунальных услуг и стоков), при мониторинге зданий и сооружений и т. п. Кроме того, сети типа LPWAN могут служить точками доступа для сбора и передачи на большие расстояния данных, которые собраны беспроводными датчиками, объединенными в сетевые кластеры.
LoRaWAN
LoRa (от англ. Long Range) — это достаточно новый метод модуляции и одноименная сетевая технология, продвигаемая открытой некоммерческой организацией LoRa Alliance (консорциум) [16]. В альянс входят многие ведущие игроки рынка «Интернета вещей»: IBM, Semtech, Cisco, Inmarsat, Swisscom и др.
В зависимости от региональных распределений, в такой сети используются радиочастоты субгигагерцового диапазона в не требующих лицензирования спектрах частот в диапазонах VHF (30-300 МГц), UHF (300 МГц — 3 ГГц) или 800-930 МГц. Поскольку технология LoRa применяет более низкие радиочастоты, чем стандарты, использующие частоты 2,4 или 5 ГГц, она отличается от них и по радиочастотным характеристикам, при этом сигналы LoRa могут проникать глубоко в здания и в места, недоступные более высокочастотным сигналам.. Архитектура сети представляет собой звезду, конечные устройства подключаются по беспроводной связи к одному или нескольким шлюзам, а шлюзы подключаются к сетевому серверу по стандартному IP-соединению.
Устройство с LoRaWAN-модулем передает данные по радиоканалу на базовую станцию. Станция принимает сигналы от всех устройств в радиусе своего действия, обрабатывает и передаёт на удалённый сервер, используя доступный канал связи (например, Ethernet) [17].
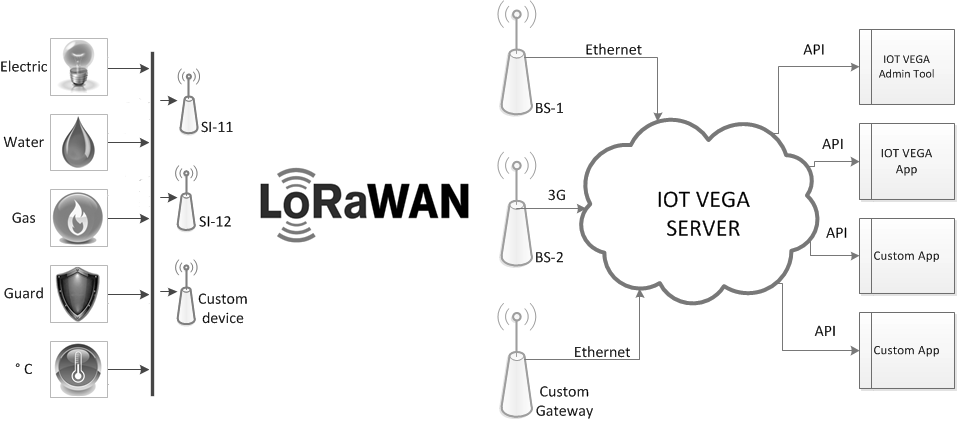
Рисунок 2.2 — LoRaWAN — как реализация LPWAN
Как правило, под LoRa обычно подразумевается тип модуляции, а под LoRaWAN — открытый сетевой протокол LoRa, который не надо напрямую ассоциировать с LPWAN (как уже говорилось ранее, это любая энергоэффективная сеть дальнего радиуса действия). LoRaWAN используется для передачи небольших по объему пакетов данных на дальние расстояния. Такая сеть была разработана специально для распределенных сетей телеметрии, межмашинного взаимодействия, или так называемого М2М (от англ. Machine-to-Machine), и, собственно, «Интернета вещей». Сеть LoRa является одной из наиболее перспективных беспроводных технологий, обеспечивающих среду сбора данных с различного оборудования: датчиков, счетчиков и сенсоров.
Модуляция LoRa сильно выделяется на фоне других типов модуляции, и является настоящим достижением в области радиочастотных технологий. Большинство стандартов ближнего радиуса действия, как было сказано ранее, использует ту или иную разновидность модуляций FSK, OFDM, FHSS или DSSS с расширением спектра. LoRa — это набор методов модуляции, запатентованных компанией Semtech, с расширением спектра посредством линейной частотной модуляции — Chirp Spread Spectrum (CSS). В целом суть этого подхода заключается в перестройке несущей частоты по линейному закону.
Благодаря такой перестройке сигнал становится устойчивым к эффекту Допплера (для мобильных пользователей) и многолучевому замиранию в отражающей радиочастотной среде, а также получает высокий уровень помехоустойчивости. Кроме того, при таком методе расширения спектра низкие битовые скорости (до 300 бит/с) могут избежать влияния источников узкополосных помех, таких как FSK-сигналы, и успешно восстановиться на приемном конце. Это может дать линии связи LoRa преимущество в 15 дБ по сравнению с узкополосным FSK-сигналом при использовании радиочастотных сигналов одинаковой мощности. Что касается шумов, то LoRa может прекрасно и без проблем работать ниже уровня окружающего радиочастотного шума и на 20 дБ или даже еще ниже по отношению к узкополосным источникам помех — из-за усиления, присущего этому виду модуляции с расширенным спектром.
Также технология LoRa позволяет использовать различные комбинации скорости передачи данных и модуляции. Они могут быть выбраны исходя из разных соображений: например, для увеличения скорости передачи данных (до 40 Кбит/с) с меньшим диапазоном покрытия, когда именно скорость передачи является критическим фактором, или для достижения большей дальности связи с низкой радиочастотной мощностью в зашумленных средах. Дело в том, что при снижении скорости передачи данных на один бит приходится больше энергии и его легче распознать на приемном конце — следовательно, при одной и той же потребляемой мощности и чувствительности приемника дальность связи увеличивается. Интересно, что коэффициенты расширения спектра LoRa, называемые SF (от англ. Spreading Factor), при передаче данных могут быть активны в одном канале, не мешая при этом друг другу. Поскольку сигнал CSS проще декодировать, чем сигналы с другими технологиями расширения спектра, то это можно сделать и с меньшей вычислительной мощностью. Что, в свою очередь, приводит к увеличению времени автономной работы устройств «Интернета вещей», несмотря на более сложное решение в части модуляции.
Преимущества LoRa:
- открытый стандарт;
- большая дальность;
- высокая проникающая способность в городской застройке;
- низкое энергопотребление, по оценкам до 10 лет работы сенсора от батареи АА;
- различные нелицензируемые частоты, такие как 109 МГц, 433 МГц, 868 МГц, 915 МГц суб-ГГц ISM полос;
- адаптивная скорость передачи данных;
- поддерживает личные и общественные сети;
- комплексная безопасность и встроенные идентификация и аутентификация.
Недостатки LoRa:
- низкая скорость передачи данных;
- Semtech — единственный поставщик чипов;
- отсутствует роуминг.
СТРИЖ
Система реализовывается российской компанией СТРИЖ-Телематика, используется собственный протокол Marcato 2.0. Частота может быть адаптирована под ISM диапазон.
«СТРИЖ» — это платформа для сбора данных на базе беспроводных LPWAN [18]. Используя новый энергоэффективный протокол радиосвязи, она позволяет устройствам передавать информацию на десятки километров и при этом работать в течение нескольких лет на одной батарее. «СТРИЖ» позиционируется как технология передачи небольшого объема данных — до 20 байт с малой частотой обновления.
Технология до определенной степени схожа с технологией LoRa со всеми плюсами и минусами последней. Принципиальное отличие: у LoRa используется широкополосное кодирование, а у СТРИЖ — узкополосная модуляция. По данным компании, такая модуляция позволяет гораздо эффективнее использовать полосу спектра, увеличить чувствительность и энергоэффективность и снизить стоимость.
По мнению разработчиков системы, данная технология позволяет создать сеть, в которой одна базовая станция собирает данные в радиусе 50 км с сотен тысяч разнотипных автономных датчиков (рисунок 2.3) [18]. Но, поскольку «СТРИЖ» требует собственной инфраструктуры, включая базовые станции, он вряд ли будет дешевле технологий на базе существующих сетей LTE, хотя стоимость оборудования для точки измерения может быть и ниже.
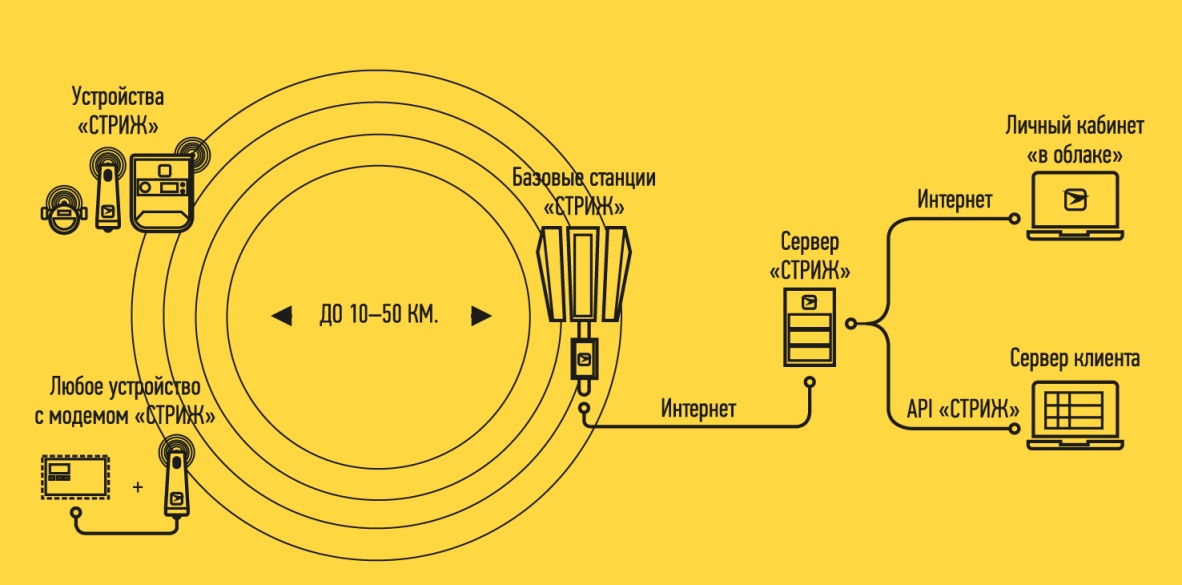
Рисунок 2.3 — Организация сети «СТРИЖ»
SigFox
Система построена одноименной компанией, основанной во Франции в 2009 году [19]. Используется технология Ultra Narrow Band (UNB), та же, что использовалась для связи между подводными лодками во время Второй мировой войны. Эта технология изначально предназначена для связи на низких скоростях передачи данных.
SigFox в настоящее время использует самый популярный европейский ISM диапазон на 868 МГц (как определено стандартом ETSI и СЕРТ), а также 902 МГц в США (как определено FCC), в зависимости от конкретных региональных правил. Система развернута с использованием возможностей современных сотовых сетей.
Устройство может отправить до 140 сообщений в день, и каждое сообщение может содержать до 12 байт полезных данных. 12 байт покрывает потребности устройств, которые передают данные, такие как местоположение устройства, индекс потребления энергии, сигнал тревоги или любой другой тип основной сенсорной информации. Также можно передавать до 4 сообщений из 8 байт полезных данных на каждое устройство в сутки. Для того, чтобы получать сообщения, устройство должно запросить данные с сервера, это должно быть запрограммировано на конкретные события или на определенное время. 8 байт, отправленные на устройство, позволяют при необходимости отправить данные конфигурации, можно оптимизировать срок службы аккумулятора. Этого достаточно, если нет необходимости в полноценной двусторонней связи.
В отличие от своих конкурентов сеть уже развернута по всей Европе и Северной Америке и охватывает десятки тысяч устройств. Компания проводит сертификацию устройств SigFox Ready™.
Преимущества SigFox:
- большое покрытие;
- высокая проникающая способность в городской застройке;
- сверхнизкое энергопотребление, по оценкам до 20 лет работы сенсора от 2-х батарей АА;
- гибкость в плане конструкции антенны;
- протокол SigFox совместим с существующими трансиверами;
- низкая стоимость.
Недостатки SigFox:
- низкая скорость передачи данных;
- зависимость от сотовой инфраструктуры;
- ограниченная помехоустойчивость.
Wheitghless
Weightless — группа открытых технологических стандартов связи LPWAN (Low-Power Wide-Area Network) для обмена данными между базовой станцией и устройствами. Стандарты развиваются некоммерческой организацией Weightless SIG [20]. В настоящее время доступны 3 стандарта — Weightless-N, Weightless-P и Weightless-W. Используются нелицензируемые частоты суб-гигагерцового диапазона.
Weightless-N использует технологию Ultra Narrow Band (UNB), является стандартом односторонней связи. Самый экономичный стандарт в группе как с точки зрения затрат, так и по энергопотреблению.
Weightless-W использует частоты TVWS (TV white space, неиспользуемые частоты телевизионного спектра) там, где это разрешено местными правилами. Это удорожает терминал и увеличивает его энергопотребление.
Weightless-P — последний из стандартов, введен в июле 2015 года, полностью двусторонний, поддерживает все основные диапазоны SRD / ISM (short range devices / industrial, scientific and medical), наиболее производительный в группе, обладает рядом дополнительных возможностей, как роуминг, пейджинг, адаптированное кодирование и др. Поэтому имеет немного меньшую дальность и более высокое энергопотребление.
Преимущества Weightless:
- открытый стандарт;
- большая дальность;
- высокая проникающая способность в городской застройке;
- низкое энергопотребление, по оценкам до 10 лет работы сенсора (Weightless-N);
- различные нелицензируемые частоты (Weightless-P);
- поддерживает личные и общественные сети;
- высокая безопасность;
- низкая стоимость (особенно Weightless-N);
Недостаток Weightless — низкая скорость передачи данных.
GSM, LTE
Консорциум 3GPP (The 3rd Generation Partnership Project), разрабатывающий спецификации для мобильной телефонии, уже давно работает над улучшением GSM (Global System for Mobile Communications, изначально Groupe Spécial Mobile) и LTE (Long-Term Evolution) с точки зрения IoT.
LTE-сети сотовой связи предлагают новые сервисы и низкоскоростные режимы передачи данных. Учитывая, что сотовые сети распространены практически повсеместно, такой подход позволяет устройствам с низким энергопотреблением передавать по ним данные, имея при этом большой диапазон покрытия и длительный срок службы батареи. Однако, как уже было сказано, экономия батарей означает и более низкую скорость передачи данных. Основными предложениями в рамках LTE для разработчиков «Интернета вещей» являются относительно медленный стандарт NB-IoT и более быстрый Cat-M1, что дает известную гибкость в принятии решений.
Преимущества GSM, LTE:
- функционирование на существующей инфраструктуре сотовых операторов;
- широкое распространение в мире;
- высокая скорость передачи данных;
- поддержка личных и общественных сетей;
- высокая комплексная безопасность;
- роуминг.
Недостатки GSM, LTE:
- лицензируемые частоты;
- высокие тарифы.
NB-LTE и NB-CoT
NB-IoT (Narrow-Band Internet of Things) –это совсем недавнее дополнение к технологии беспроводного Интернета, которое представляет собой стандарт сотовой связи для устройств телеметрии с малыми объемами передачи данных [21].
Корпорации Nokia Networks, Ericsson и Intel объединились для продвижения технологии Narrow-Band Long-Term Evolution (NB-LTE). Sprint, Verizon Wireless, Alcatel-Lucent, Qualcomm, Samsung, Sony и ZTE также стали частью этой инициативы.
NB-LTE рассматривается некоторыми экспертами как прямой вызов Huawei Technologies, которая развивает технологию Narrowband Cellular IoT (NB-CIoT). NB-CIoT уже получила поддержку таких тяжеловесов, как Vodafone, T-Mobile, TeliaSonera и China Unicom.
Основное различие между NB-LTE и NB-CIoT сводится к тому, насколько существующие LTE-сети могут быть переориентированы на IoT. Huawei отказался от комментариев на этот счет, но критики подхода «чистого листа» (clean slate) NB-CIoT отмечают, что эта технология требует новых чипсетов и, кажется, не имеет обратную совместимость с LTE-сетями старше Release 13.
По словам представителя Nokia, NB-LTE, напротив, может быть полностью интегрирована в существующие LTE- сети и работает в рамках существующих полос LTE. Другими словами, NB-LTE использует существующую экосистему и, таким образом, обещает большую экономию на масштабе.
В остальном обеим технологиям удалось решить проблему энергосбережения: заявленная продолжительность работы устройства от элемента питания — 10 лет. Кроме того, в несколько раз улучшена проникающая способность в плотной застройке, и количество возможных подключений устройств увеличено на 2 порядка.
Преимущества и недостатки этих технологий естественным образом произрастают из GSM и LTE.
Таким образом, рассмотренные LPWAN-сети в той или иной степени могут использоваться для сбора данных с различного оборудования: датчиков, счётчиков, сенсоров т.п. в промышленном интенсивном садоводстве.
Технология LoRA наиболее полно отвечает требованиям к системе сбора данных и управления в интенсивном садоводстве.
Выбор технологии LoRA для использования в системе управления обусловлен ее уникальными особенностями [22]:
- Большая дальность передачи радиосигнала по сравнению с другими беспроводными технологиями, используемыми для телеметрии. Благодаря высокой чувствительности приёмника и применению модуляции LoRa обеспечивается устойчивая связь на расстоянии до 5 км в городских условиях при плотной застройке и до 15 км в зоне прямой видимости.
- Низкое электропотребление. Оконечное устройство (например, датчик) может работать до 10 лет от одной батареи ёмкостью 3400mAh благодаря сверхбыстрому переходу из режима сна и обратно и низкому энергопотреблению в режимах приема и передачи данных.
- Защита данных. Безопасность протокола LoRaWAN гарантируется следующими условиями: 64-разрядный уникальный номер устройства [EUI 64], 128-разрядный сетевой ключ соединения [AES 128], 128-разрядный сетевой ключ приложения [AES 128].
- Масштабируемость. Один шлюз (базовая станция) может обслуживать до 5 тысяч оконечных узлов на каждый км2, а топология типа «звезда» без использования повторителей позволяет легко наращивать сеть.
В России технология LoRa делает первые шаги, а например, в Китае она уже применяется очень широко. Сегодня Китай стал локомотивом продвижения LoRaWAN» [23].
Производителем оборудования с поддержкой технологии LoRa в России является компании «Вега-Абсолют», г. Новосибирск [24].
2.2 Разработка проектно-конструкторской документации на систему автоматического контроля влажности почвы и систему управления поливом
2.2.1 Выбор структуры автоматизированной системы контроля и управления. Разработка структурной схемы комплекса технических средств
Структурная схема комплекса технических средств представлена на рисунке 2.4
При построении автоматизированной системы контроля и управления используется иерархическая информационная структура с применением на разных уровнях вычислительных средств различной мощности.
Для разработки данной автоматизированной системы контроля и управления выбрана трехуровневая структура комплекса технических средств (КТС).
АРМ оператора/агронома
Базовая станция LORA
Щит управления поливом
Датчики влажности почвы
Счетчики воды
Клапаны воды с электроприводом
Ethernet
(основной канал)
Ethernet
(основной канал)
GPRS/GSM
(альтернативный канал)
Сеть LoraWAN
(беспроводная передача данных)
Электрические
сигналы
Рисунок 2.4 — Структура комплекса технических средств
Первый (нижний) уровень представлен датчиками и исполнительными механизмами. Датчики представлены измерительными преобразователями влажности почвы. Датчики имеют выходной унифицированный сигнал 4…20 мА, пропорциональный относительной влажности почвы. Передача информация от датчиков влажности на автоматизированное рабочее место оператора/агронома осуществляется посредством беспроводной сети LoRaWAN. В проекте используется коммуникационное оборудование сети LoRaWAN отечественной компании «ВЕГА Абсолют» — базовой станции БС1-2 и конвертором токовой петли ТП-11.
Клапаны с электроприводом осуществляют управление подачей воды в капельную систему орошения и дождевания. Управление клапанами осуществляется сигналами 24VAC, поступающими от щита управления поливом.
Второй (средний) уровень комплекса технических средств представлен базовой станцией сети LoRaWAN и щитом управления поливом, в котором расположен управляющий контроллер ОВЕН ПЛК-210.
Базовая станция сети LoRaWAN осуществляет взаимодействие с конверторами токовой петли с подключенными к ним датчиками влажности почвы. Для передачи данных на сервер и АРМ оператора/агронома в качестве основного канала используется сеть Ethernet. Возможен альтернативный способ передачи данных (при очень большом удалении базовой станции от сервера) с использованием беспроводного канала GSM/GPRS.
Контроллер ОВЕН ПЛК-210, установленный в щите управления поливом выполняет:
- сбор сигналов от счетчиков воды, установленных на линиях подачи воды на каждый участок;
- реализацию алгоритмов управления и формирование управляющих сигналов на исполнительные механизмы (клапаны);
- передачу и прием информации из промышленной сети Ethernet.
Третий (верхний) уровень комплекса технических средств представлен АРМом оператора/агронома, который совмещен с сервером сети LoRaWAN.
АРМ оператора осуществляет выполнение следующих функций:
- формирование сетевых запросы к контроллеру среднего уровня и базовой станции;
- получение от них оперативной информации о ходе технологического процесса;
- сигнализация (световая и звуковая) о выходе параметров за предупредительные и предельно допустимые (аварийные) границы;
- отображение на экране монитора хода технологического процесса в удобном для оператора виде (в цифровом виде, в виде трендов, динамизированных мнемосхем);
- осуществление долговременного хранения динамической информации (ведение архива) о ходе процесса;
- коррекция необходимых параметров алгоритмов управления;
- реализация функций ручного (дистанционного) управления любым клапаном на линиях подачи воды;
- автоматическая генерация отчетов;
- протоколирование всех действий оператора по управлению системой.
Реализация этих функция возможна при использовании в составе АРМ оператора SCADA-системы КРУГ-2000.
2.2.2 Выбор основных технических средств
Управление поливом осуществляется из операторского помещения, в котором находятся автоматизированное место оператора и щит управления поливом.
Измерение влажности почвы осуществляется с помощью измерительного преобразователя TH-12 (рисунок 2.5). Датчик влажности ТН-12 предназначен для преобразования относительной влажности в унифицированный выходной сигнал 4-20 мА или передачи измеренных значений по интерфейсу RS-485 (Modbus RTU). Питание прибора – 12…30 В, поддерживаемые интерфейсы и протоколы — 4-20мА/Modbus RTU, диапазон измерений относительной влажности – 0…100%, степень пылевлагозащиты — IP68, абсолютная погрешность измерения влажности± 3,0 %(0-53%);± 5,0 %(53-100%).

Рисунок 2.5 — Датчик влажности ТН-12
Датчик влажности ТН-12 работает в комплекте с конвертером Вега ТП-11. Конвертер Вега ТП-11 (рисунок 2.6) предназначен для считывания показаний с устройств, имеющих интерфейс токовая петля 4-20 мА, с последующим накоплением и передачей этой информации в сеть LoRaWAN. Конвертер может быть использован для снятия показаний с любых датчиков и промышленного оборудования с интерфейсом 4-20 мА, таких как температурные датчики, датчики влажности, датчики давления. Конвертер является автономным устройством и обеспечивает питание подключаемых датчиков напряжением 24 В непосредственно через интерфейс 4-20 мА.

Рисунок 2.6 — Конвертер Вега ТП-11
Элементом питания для конвертера служит встроенная батарея ёмкостью 6400 mAh, рассчитанная на срок службы до 10 лет при передаче данных один раз в сутки. Также конвертер может работать от внешнего источника питания с напряжением 10…36 В.
Настройка конвертера осуществляется по USB с помощью специального ПО «Vega LoRaWAN конфигуратор».
Технические характеристики конвертера Вега ТП-11 представлены на рисунке 2.7.
В целях экономии ресурса батареи конвертера питающее напряжение 24 В подаётся не постоянно. Напряжение 24 В подаётся на устройство «4-20 мА» за несколько секунд до выполнения опроса для того чтобы датчик успел включиться и установить соответствующий измеряемому параметру ток. Это время, так называемое «время прогрева», является настраиваемым из конфигуратора параметром и может устанавливаться от 1 до 60 секунд.
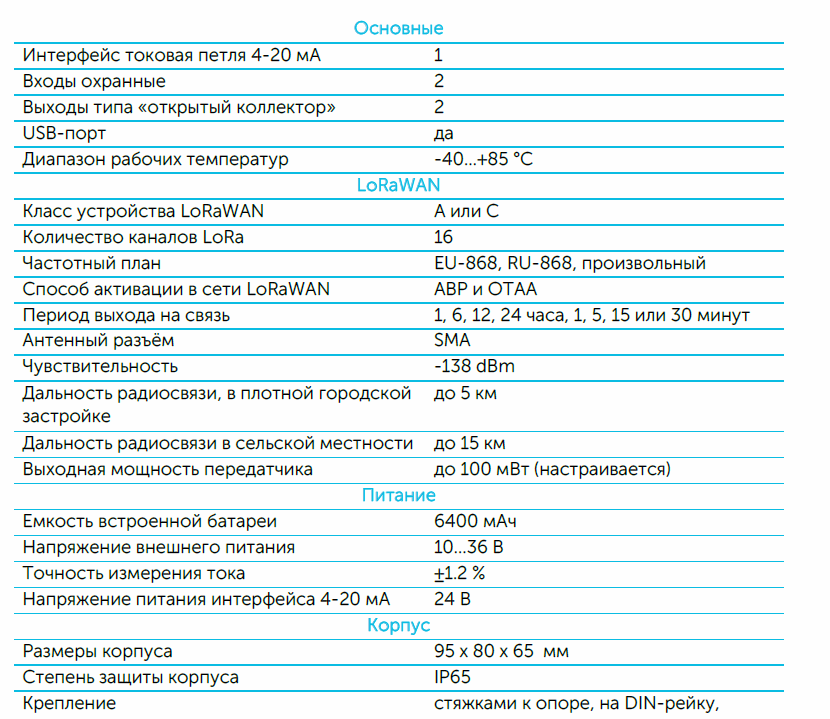
Рисунок 2.7 – Технические характеристики конвертера Вега ТП-11
Взаимодействие по сети LORAWAN с конвертерами Вега ТП-11 осуществляется с помощью базовой станции Вега БС-2.2 (рисунок 2.8). Базовая станция Вега БС предназначена для разворачивания сети LoRaWAN на частотах диапазона 863-870 МГц. Базовая станция работает на операционной системе Linux и имеет предустановленное ПО Packet forwarder.

Рисунок 2.8 – Базовая станция Вега БС-2.2
Питание базовой станции и сообщение с сервером осуществляется через канал Ethernet. Настройка осуществляется через канал Ethernet либо через интерфейс базовой станции, либо по протоколу SSH с помощью любой терминальной программы (например, PuTTY).
Базовые станции Вега БС-2 и Вега БС-2.2 имеют дополнительно 3G-модуль, который обеспечивает дополнительный канал связи и GPS/ГЛОНАСС-модуль для определения местоположения базовой станции и синхронизации встроенных часов по сигналам навигационных спутников.
Технические характеристики базовых станций представлены на рисунке 2.9.
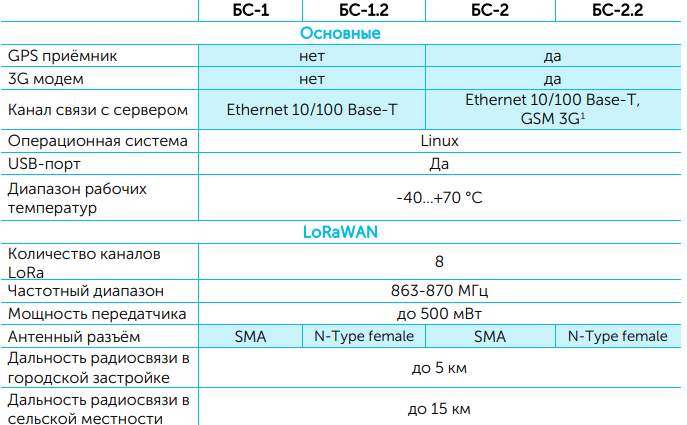
Рисунок 2.9 – Технические характеристики базовых станций ВЕГА
Управление технологическим процессом осуществляется отечественным программируемым логическим контроллером ОВЕН ПЛК-210 (рисунок 2.10).

Рисунок 2.10 — Программируемый логический контроллер ОВЕН ПЛК-210
ОВЕН ПЛК210 – новая линейка моноблочных контроллеров с расширенными коммуникационными возможностями и дополнительными функциями надежности.
Контроллер программируется в среде CODESYS V3.5 SP14 Patch 3. В рамках единого ПО пользователь разрабатывает управляющую логику, человеко-машинный интерфейс и настраивает обмен с другими устройствами. В качестве модулей расширения входных и выходных сигналов рекомендуется к использованию линейка модулей Мх210 с интерфейсом Ethernet.
Основным коммуникационным интерфейсом ПЛК210 является Ethernet. Контроллер имеет 4 порта Ethernet, 3 из которых объединены в управляемый коммутатор. Это позволяет использовать различные сетевые топологии, а также применять контроллер в качестве шлюза между промышленной сетью и сетью предприятия.
Контроллер ОВЕН ПЛК210 на борту имеет встроенные дискретные входы-выходы. В проекте дискретные входы используются для приема сигналов от счетчиков воды, а дискретные выходы – для управления электроприводами клапанов на линиях подачи воды.
В дополнение к контроллеру для увеличения числа дискретных выходов в проекте используется 16-ти канальный модуль дискретного вывода с интерфейсом Ethernet МУ-402 (рисунок 2.11).

Рисунок 2.11 — 16-ти канальный модуль дискретного вывода ОВЕН МУ-402
Управление подачей воды в системах капельного полива и дождевания осуществляется с помощью электромагнитных клапанов PGV фирмы HUNTER (рисунок 2.12)

Рисунок 2.12 — Электромагнитные клапаны PGV фирмы HUNTER
Электромагнитные клапаны PGV состоят из двух камер, отделенных мембраной. В мембране есть отверстие, благодаря которому при закрытом положении клапана мембрана прижата к нижней камере. При открытии соленоида (вручную или с пульта управления) открывается дополнительное отверстие, большее по диаметру, чем в мембране. Давление в верхней камере становится меньше, чем в нижней, мембрана поднимается, и вода поступает в линию.
Для ручной регулировки потока воды через клапан применяют вентиль контроля потока, прижимающий или отпускающий мембрану (диафрагму). Стандартные клапаны оснащены соленоидами переменного тока 24В.
Корпус изготовлен из высококачественного ПВХ, а прочная диафрагма специально разработана для интенсивной эксплуатации. В зависимости от диаметра подсоединяемой к клапану трубе бывают следующие варианты исполнения: 1 дюйм, 1 ½ дюйма, 2 дюйма.
2.2.3 Описание функциональной схемы автоматизации
Функциональная схема автоматизации является основным технологическим документом, определяющим объем автоматизации.
ФСА представляет собой чертеж, на котором схематично изображено основное техническое оборудование, коммуникации, органы управления и средства автоматизации с указанием связей между технологическим оборудованием и элементами автоматики.
Рассмотрим функциональную схему автоматизации процесса контроля влажности и управления поливом.
Согласно техническому регламенту необходимо осуществлять контроль влажности почвы. Контроль влажности осуществляется датчиками TH-12. Позиции датчиков представлены в таблице 2.3. Датчики влажности имеют выходной сигнал 4…20 мА и работают в комплекте с конвертерами токовой петли ВЕГА ТП-11. Позиции соответствующих приборов также приведены в таблице 2.3.
Сигналы с конвертеров ВЕГА ТП-11 через сеть LoRaWAN поступают на базовую станцию и затем на сервер и в АРМ оператора/агронома.
Управление влажностью почвы на различных участках осуществляется за счет подачи воды через клапаны с электроприводом. Необходимое количество подаваемой воды определяется с помощью счетчиков жидкости.
Счетчики жидкости имеют дискретный выходной сигнал, который поступает на дискретные входы контроллера управления поливом. Контроллер осуществляет подсчет поданной на каждой участок воды и в соответствии с заданием производит управление соответствующими клапанами. Позиции соответствующих счетчиков и клапанов приведены в таблице 2.4.
Таблица 2.3 – Позиционные обозначения приборов системы контроля влажности почвы
| Участок | Позиция датчика
влажности |
Позиция конвертера | ||
| 1 | 2 | 3 | ||
| Питомник 1 | 1МЕ 1-1 | 1МY 1-2 | ||
| 1МЕ 2-1 | 1МY 2-2 | |||
| 1МЕ 3-1 | 1МY 3-2 | |||
| 1МЕ 4-1 | 1МY 4-2 | |||
| 1МЕ 5-1 | 1МY 5-2 | |||
| 1МЕ 6-1 | 1МY 6-2 | |||
| Питомник 2 | 2МЕ 1-1 | 2МY 1-2 | ||
| 2МЕ 2-1 | 2МY 2-2 | |||
| 2МЕ 3-1 | 2МY 3-2 | |||
| 2МЕ 4-1 | 2МY 4-2 | |||
| 2МЕ 5-1 | 2МY 5-2 | |||
| 2МЕ 6-1 | 2МY 6-2 | |||
| Питомник 3 | 3МЕ 1-1 | 3МY 1-2 | ||
| 3МЕ 2-1 | 3МY 2-2 | |||
| 3МЕ 3-1 | 3МY 3-2 | |||
| 3МЕ 4-1 | 3МY 4-2 | |||
| 3МЕ 5-1 | 3МY 5-2 | |||
| 3МЕ 6-1 | 3МY 6-2 | |||
| Суперинтенсивный сад | 4МЕ 1-1 | 4МY 1-2 | ||
| 4МЕ 2-1 | 4МY 2-2 | |||
| 4МЕ 3-1 | 4МY 3-2 | |||
| 4МЕ 4-1 | 4МY 4-2 | |||
| 4МЕ 5-1 | 4МY 5-2 | |||
| 4МЕ 6-1 | 4МY 6-2 | |||
| Интенсивный сад | 5МЕ 1-1 | 5МY 1-2 | ||
| 5МЕ 2-1 | 5МY 2-2 | |||
| 5МЕ 3-1 | 5МY 3-2 | |||
| 5МЕ 4-1 | 5МY 4-2 | |||
| Маточник | 6МЕ 1-1 | 6МY 1-2 | ||
| 6МЕ 2-1 | 6МY 2-2 | |||
| 6МЕ 3-1 | 6МY 3-2 | |||
| 6МЕ 4-1 | 6МY 4-2 | |||
Таблица 2.4 – Позиционные обозначения приборов системы управления поливом
| Участок | Позиция счетчика воды | Позиции клапанов |
| 1 | 2 | 3 |
| Питомник 1 | 1FQE 7-1 | 1V1, 1V2, 1V3, 1V4, 1V5, 1V6 |
| Питомник 2 | 2FQE 7-1 | 2V1, 2V2, 2V3, 2V4, 2V5, 2V6 |
| Питомник 3 | 3FQE 7-1 | 3V1, 3V2, 3V3, 3V4, 3V5, 3V6 |
| Суперинтенсивный сад | 4FQE 7-1 | 4V1, 4V2, 4V3, 4V4, 4V5, 4V6 |
| Интенсивный сад | 5FQE 5-1 | 5V1, 5V2, 5V3, 5V4 |
| Маточник | 6FQE 5-1 | 6V1, 6V2, 6V3 |
2.3 Разворачивание и настройка сети LoRaWAN
Сеть LoRaWAN это радиосеть (рисунок 2.13). Общение между оконечными устройствами и сервером осуществляется через ретрансляторы радиосигнала, в роли которых выступают базовые станции Вега БС-1 или Вега БС-2.
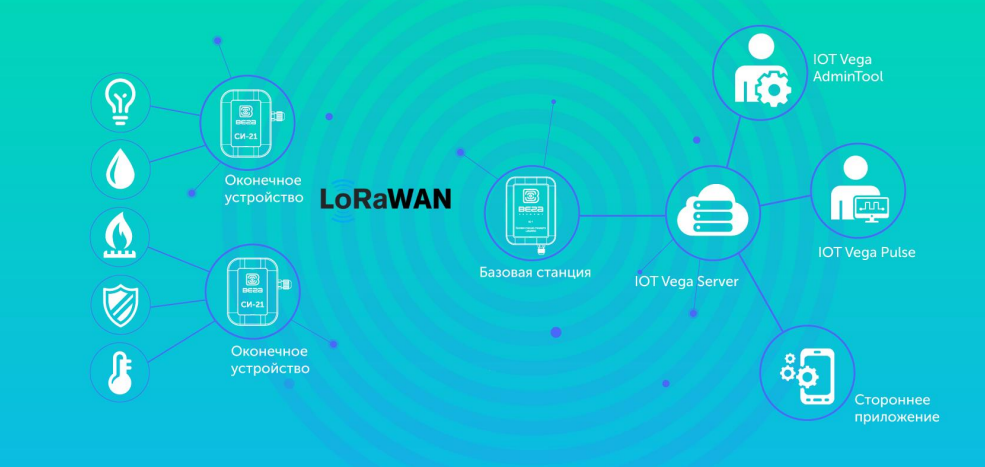
Рисунок 2.13 – Структура сети LoRaWAN
Базовые станции зарегистрированы на сервере и имеют привязку к серверу. Оконечные устройства зарегистрированы на сервере и имеют привязку к серверу. Между базовыми станциями и оконечными устройствами никакой конкретной привязки нет. Базовая станция передает сообщения с сервера в эфир, а все оконечные устройства в радиусе распространения сигнала принимают эти сообщения. Также и наоборот, оконечное устройство передает сообщения в эфир, а все базовые станции поблизости принимают эти сообщения и передают на сервер, к которому привязаны. Сообщения содержат идентификационную информацию, поэтому сервер не обрабатывает сообщения с устройств, не зарегистрированных на данном сервере, так же и оконечные устройства не обрабатывают сообщения, предназначенные для другого оконечного устройства.
Таким образом, построение сети начинается с организации сервера. Сервер должен работать круглосуточно для обеспечения работы сети. Далее необходимо обеспечить связь базовой станции и сервера, после чего можно начинать подключать оконечные устройства.
Построение сети осуществляется в несколько этапов.
1. Установка и настройка сервера.
2. Подключение базовой станции к серверу.
3. Подключение оконечных устройств к серверу.
4. Установка оборудования на место его работы.
Причем первый этап необходимо осуществлять на компьютере, который впоследствии станет сервером и будет круглосуточно работать. Второй и третий этапы можно осуществлять в любом удобном месте с компьютером, подключенным к сети Интернет. Четвертый этап осуществляется на местах установки конкретных устройств.
Этап 1. IOT VEGA SERVER
После скачивания архива с нужной версией сервера, следует распаковать архив, зайти в папку и открыть файл settings.conf в любом текстовом редакторе. Данный файл содержит настройки сервера. Содержимое файла приведено ниже. Красным выделены строки, в которых следует произвести изменения, синим отображены комментарии файла, зелёным комментарии данного руководства. 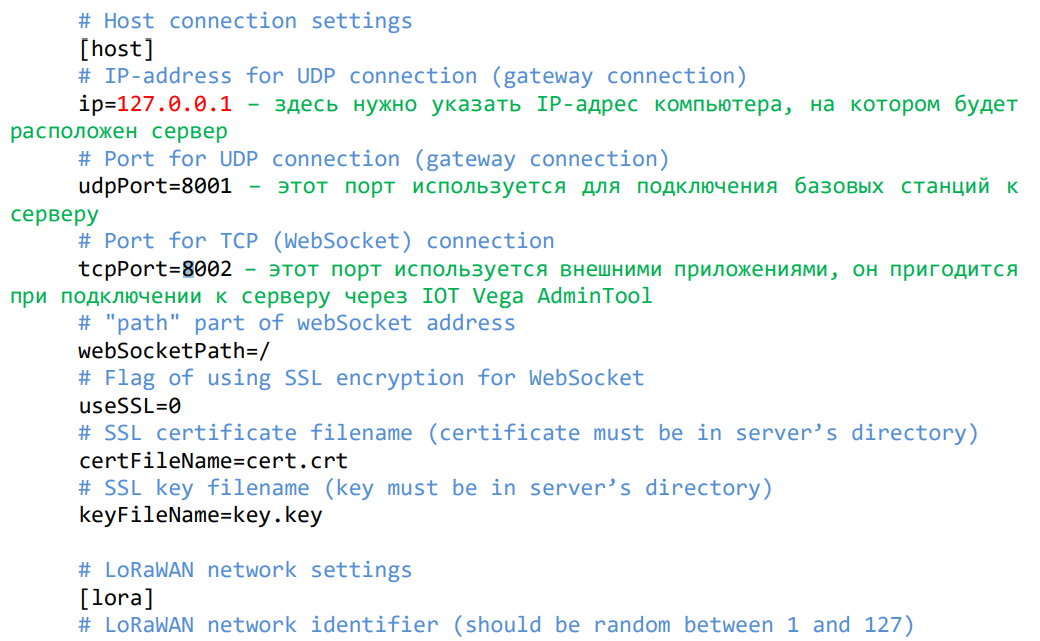
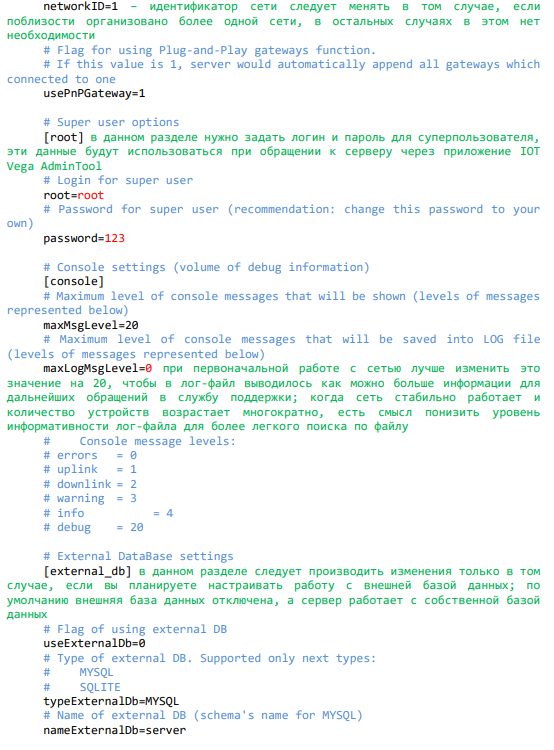
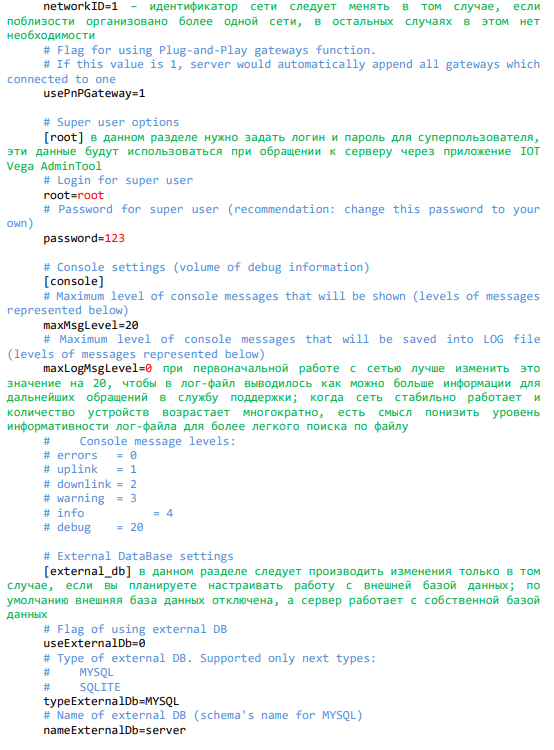

После внесения необходимых изменений файл настроек следует сохранить и закрыть. Для корректной работы сервера нужно также установить драйвера openSSL и msvc c++ 2013, папки с которыми находятся в корневой папке сервера. После этого можно запустить файл iot-vega-server.exe и убедиться, что сервер работает (рисунок 2.14).
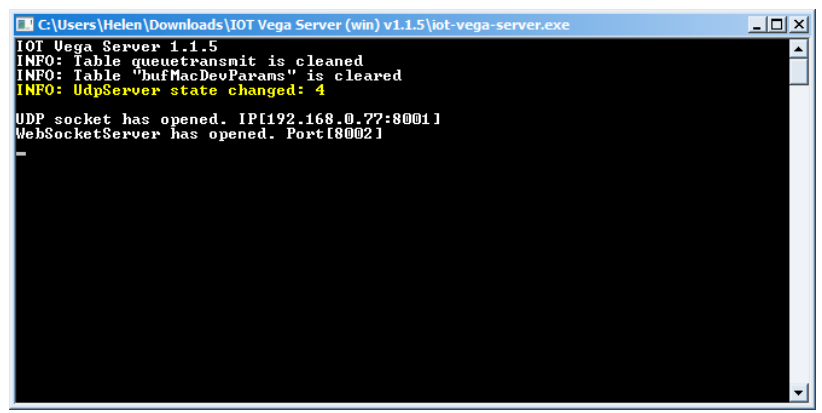
Рисунок 2.14 – Проверка работоспособности сервера
О корректной работе сервера говорят строки UDP socket has opened и WebSocketServer has opened, а также отсутствие каких-либо сообщений об ошибках.
Этап 2. Базовая станция
После запуска сервера можно приступать к подключению и настройке базовой станции. Для подключения базовой станции к компьютеру потребуется установить драйвер для COM-порта (его можно скачать на сайте iotvega.com со страницы базовой станции). Также необходима терминальная программа PuTTY или любая другая терминальная программа с поддержкой подключения по SSH. Подключение осуществляется в следующем порядке:
1. Подключить базовую станцию к POE-адаптеру.
2. Подключить POE-адаптер к LAN разъему сетевого оборудования и подключить в сеть электропитания.
3. Подключить базовую станцию к компьютеру по USB.
4. Установить драйвер для COM-порта. В диспетчере устройств в разделе «Порты» убедиться, что появился COM-порт подключенной базовой станции и запомнить его номер.
5. Открыть программу PuTTY, выполнить подключение по последовательному порту согласно руководству по эксплуатации базовой станции.
6. После этого открыть программу PuTTY, выбрать способ подключения Serial, и ввести номер виртуального COM-порта базовой станции и скорость (115200) в соответствующие поля.
7. После чего нажать Open.
После подключения к базовой станции появится окно терминала PuTTY, где нужно ввести логин и пароль.
Программа Packet forwarder запускается автоматически при старте системы. Перед тем, как настраивать базовую станцию нужно завершить процесс Packet forwarder, набрав команду:
/etc/init.d/lora_watchdog stop
Листаем файл настроек вниз до строчки gateway_conf.
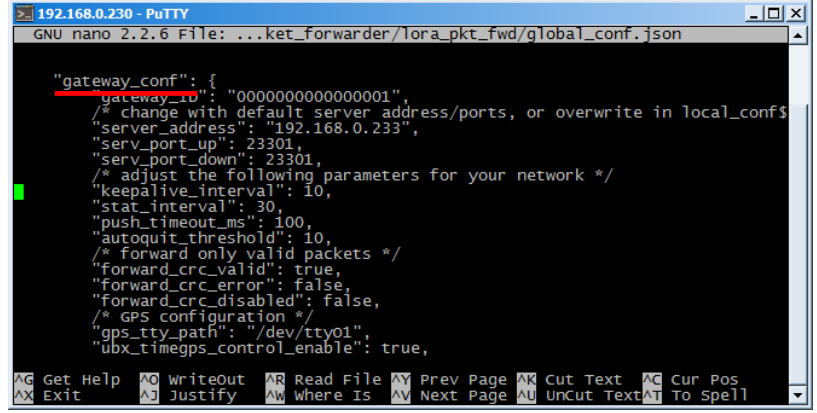
В данном разделе нужно указать IP-адрес и UDP-порт сервера, указанные в файле настроек сервера settings.conf.
Порт указываем дважды, в строчках serv_port_up и serv_port_down один и тот же.
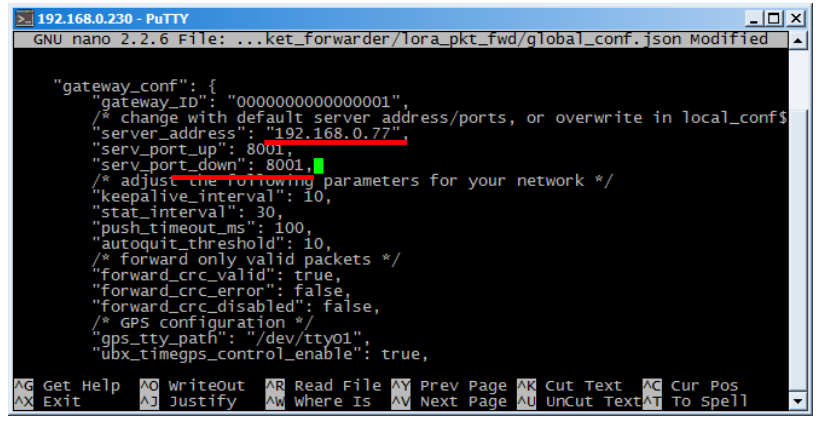
После внесения изменений нажать ctrl+X – выход из файла. На предложенный вопрос о сохранении изменений нажать клавишу Y. Подтвердить клавишей Enter. После изменения настроек базовой станции необходимо снова запустить процесс:
/etc/init.d/lora_watchdog start
После чего процесс Packet forwarder будет запущен с новыми настройками. В окне сервера появится запись о подключенной базовой станции. Обратите внимание на значение отклика (параметр LATENCY), он может варьироваться в зависимости от качества связи от 0 до 100 по сети Ethernet и от 100 до 500 по сети 3G в порядке нормы.
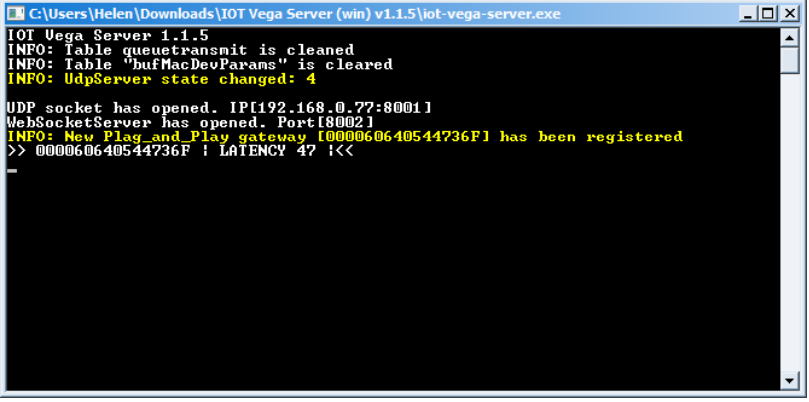
Сервер и базовая станция друг друга видят, можно закрыть PuTTY. Сервер должен оставаться открытым.
IOT VEGA ADMINTOOL
Открыть папку с программой, найти файл config.js и открыть с помощью любого текстового редактора. В данном файле всего две строчки:
const address_ws = ‘ws://127.0.0.1:8002’;
const demo_user = false;
Изменить следует IP-адрес и номер порта в соответствии с указанными в файле настрое сервера settings.conf, но в этот раз нужно использовать TCP-порт. После чего сохранить и закрыть файл. Запустить файл index.html с помощью любого браузера. Откроется web-страница с панелью ввода логина и пароля. Первым делом следует нажать кнопку в виде шестеренок.
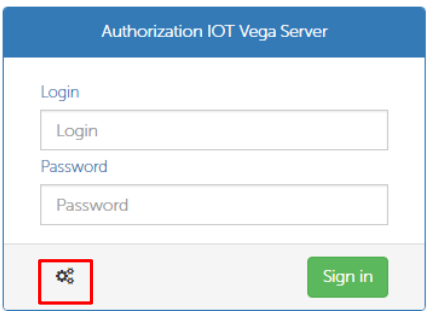
Появится строка с адресом и портом сервера, указанными в файле настроек config.js, а также значок подключения к серверу. Зелёный значок означает успешное подключение.
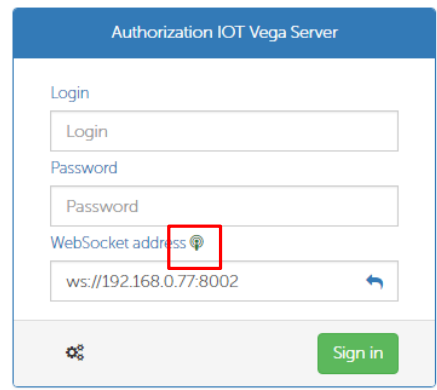
В поля Login и Password необходимо ввести логин и пароль, указанные в файле settings.conf соответственно. Нажать кнопку Sign in. Приложение IOT Vega AdminTool запущено.
Во вкладке Gateways можно увидеть подключенную базовую станцию. В колонке Active отображается статус базовой станции, зелёная галочка означает, что базовая станция передаёт данные на сервер.
ЭТАП 3 — ПОДКЛЮЧЕНИЕ ОКОНЕЧНЫХ УСТРОЙСТВ
Перед первым подключением устройства к компьютеру необходимо установить драйвер для COM-порта stsw-stm32102. После запуска исполняемого файла VCP_V1.4.0_Setup.exe появится окно установщика: В этом окне нужно нажать кнопку Next, затем Install, после чего начнётся установка. По окончании появится окно успешного завершения установки. После нажатия Finish драйвер готов к работе, — можно подключать оконечные устройства по USB.
Все оконечные устройства настраиваются с помощью программы «Vega LoRaWAN Configurator» при подключении к компьютеру по USB. Программа «Vega LoRaWAN Configurator» не требует установки. При запуске исполняемого файла появляется окно работы с программой. Для подключения к устройству необходимо выполнить следующие шаги:
1. Подключить USB-кабель к устройству.
2. Запустить программу «Vega LoRaWAN Configurator».
3. Нажать кнопку «Подключиться» в меню слева.
Программа автоматически распознает тип устройства, и меню выбора устройства станет неактивным.
Всё, что нужно для подключения устройства к сети находится во вкладке «Информация».
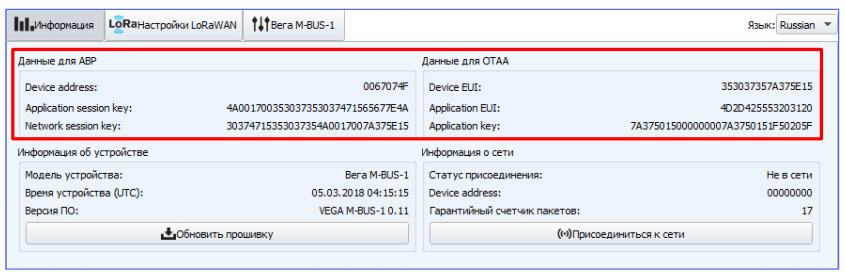
Данные для ABP – отображаются данные, необходимые для регистрации устройства в сети LoRaWAN в режиме активации ABP (Activation By Personalization).
Данные для OTAA – отображаются данные, необходимые для регистрации устройства в сети LoRaWAN в режиме активации OTAA (Over The Air Activation).
Для подключения устройства к серверу в программе IOT Vega AdminTool необходимо перейти на вкладку Devices и нажать кнопку «+». Появится окно подключения нового оконечного устройства. Поля, обязательные для заполнения подсвечены красным цветом. Также рекомендуется указывать имя девайса, чтобы можно было однозначно идентифицировать его при большом количестве подключенных устройств.
После заполнения всех полей нажать кнопку Save. Устройство появится в списке устройств.
В программе «Vega LoRaWAN Configurator» нажать кнопку «Присоединиться к сети». Убедиться, что пакет пришел на сервер, в столбце Last connection появится информация с датой и временем последнего пакета.
Теперь можно настроить устройство в программе «Vega LoRaWAN Configurator» в соответствии с руководством по эксплуатации на конкретное устройство. После чего отсоединить устройство от компьютера. Таким образом, можно подключить любые оконечные устройства к сети LoRaWAN.
ЭТАП 4 — УСТАНОВКА ОБОРУДОВАНИЯ НА МЕСТО ЕГО РАБОТЫ
Теперь, когда сеть LoRaWAN построена и успешно функционирует, нужно разместить базовые станции и оконечные устройства там, где они будут работать постоянно. Работа сети во многом зависит от правильного взаимного расположения антенны базовой станции и оконечных устройств. Проверить качество сигнала можно с помощью тестера сети LoRaWAN. Порядок проведения работ зависит от конкретных целей, для которых строится сеть, и порядок размещения устройств и антенны выбирается в соответствии с ними.
Основные рекомендации по размещению антенны даны в руководстве по эксплуатации на базовую станцию. Общее правило – антенна должна быть расположена на высокой точке, на открытом пространстве, чтобы ничего не мешало распространению сигнала. Чем мощнее антенна, тем дальше распространяется сигнал, поэтому рекомендуется использовать антенну с усилением, по крайней мере, 10 dBi. С такой антенной зона покрытия базовой станции может достигать 5 км в городе, и 15 км за городом.
Базовая станция соединяется с антенной проводом, поэтому может находиться в любом месте, удобном для подключения к сети Ethernet или 3G. После установки базовой станции и антенны и проверки корректной работы базовой станции через IOT Vega AdminTool можно приступать к установке оконечных устройств. С помощью тестера сети можно убедиться в качестве сигнала на месте установки оконечного устройства. Далее подключить устройство по схеме согласно руководству по эксплуатации на конкретное устройство. И нажать кнопку активации на плате. Устройства с импульсными входами при подключении к ним внешних счетчиков могут накапливать случайные импульсы. После завершения настройки такого устройства необходимо сбросить эти показания, удерживая кнопку активации в течении 5 секунд, а затем снова включить устройство. Корректность работы оконечных устройств также можно проверять через IOT Vega AdminTool.
Построение сети завершено.
3 НАПРАВЛЕНИЕ «ГЛОБАЛЬНАЯ СИСТЕМА ИНТЕЛЛЕКТУАЛЬНОГО УПРАВЛЕНИЯ И СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ»
3.1 Разработка прикладного программного обеспечения управляющего контроллера системы управления капельным поливом тест-полигона «Умный сад»
3.1.1 Описание программного обеспечения управляющего контроллера
Одним из самых популярных в мире универсальных комплексов программирования является инструментальная система CoDeSys, которая поддерживает стандарт МЭК и учитывает фирменные особенности большого количества ПЛК различных фирм.
Инструментальная система CoDeSys (Controllers Development System) фирмы 3S (Smart Software Solutions) относится к классу систем CASE-типа (Computer Aided Software Engineering) и представляет проектировщику удобную среду для программирования контроллеров на языках МЭК [3 — 5]. Используемые редакторы и отладочные средства базируются на широко известных принципах. CoDeSys позволяет использовать языки: IL, ST, LD, SFC, FBD, а так же язык непрерывных функциональных схем CFC (Continuous Flow Chart), который относится к языкам высокого уровня и является продолжением языка FBD.
Отечественная компания ОВЕН является производителем средств промышленной автоматизации собственной разработки на современной элементной базе.
В настоящее время компанией выпускаются программируемые логические контроллеры четырех серий:
- контроллеры с HMI для локальных систем автоматизации ОВЕН ПЛК63/ПЛК73. Основные области применения этих контроллеров: центральные и индивидуальные тепловые пункты, жилищно-коммунальное хозяйство, котельные и различные небольшие установки;
- контроллеры для малых систем автоматизации ОВЕН ПЛК100/ПЛК150/ПЛК154. Данные ПЛК предназначены для управления средними и малыми объектами, и для построения систем диспетчеризации;
- моноблочные контроллеры с дискретными и аналоговыми входами/выходами для средних систем автоматизации ПЛК110/ПЛК160. Данные ПЛК предназначены для автоматизации систем средней сложности, для создания распределенных систем управления;
- коммуникационные контроллеры ПЛК/210/ПЛК304/ПЛК323, Данные ПЛК это PC — совместимые контроллеры под управлением ОС Linux, которые могут быть использованы для организации взаимодействия между различным оборудованием, оснащенным различными же интерфейсами и протоколами связи.
Первые три серии ПЛК компании ОВЕН используют в качестве инструментальной системы программирования систему CoDeSys v.2, при этом могут быть использованы различные порты ПЛК (USB Device, Ethernet, RS-232 Debug).
Для программирования коммуникационных контроллеров ПЛК210/ПЛК304/ПЛК323 используется система CoDeSys v3.5.
CoDeSys реализует поддержку всех пяти стандартных (IEC 61131-3) языков программирования ПЛК:
1. Язык последовательных функциональных схем SFC (Sequential Function Chart) .
2. Язык функциональных блоковых диаграмм FBD (Function Block Diagrams)+ расширенный аналог FBD – CFC (Continuous Flow Diagram).
3. Графический язык релейных диаграмм или релейной логики LD (Ladder Diagrams).
4. Язык структурированного текста ST (Structured Text) .
5. Язык инструкций IL (Instruction List).
1. Язык последовательных функциональных схем SFC (Sequential Function Chart) – графический язык, позволяет описать логику программы на основе чередующихся процедурных шагов и условных переходов, а также представить последовательно-параллельные задачи в понятной и наглядной форме. Основными элементами языка являются шаг и переход.
Шаг представляет собой набор операций над переменными. Переход – набор логических условий, определяющий передачу управления к другому шагу.
По внешнему виду описание на языке SFC напоминает хорошо известные логические блок-схемы алгоритмов, при этом SFC предоставляет возможности построения сложных распараллеленных алгоритмов. Язык SFC является наиболее важным из семейства языков стандарта IEC 61131-3. Однако SFC не имеет средств для описания шагов и переходов, и их содержание должно быть выражено средствами других языков стандарта.
2. Язык функциональных блоковых диаграмм FBD (Function Block Diagrams) – графический язык, позволяет создать программу практически любой сложности с использованием библиотечных функций (арифметических, тригонометрических, строковых) и функциональных блоков (логических, ПИД-регулирования, мультиплексоров и др.).
Программа на языке FBD выглядит как набор блоков, между входами/ выходами которых графически установлены связи. Программирование сводится к выбору необходимых библиотечных функций и блоков и соединению их соответствующих входов/выходов. В результате получается максимально наглядная и хорошо контролируемая программа.
3. Графический язык релейных диаграмм или релейной логики LD (Ladder Diagrams) является стандартизованным вариантом класса языков релейно-контактных схем и применяется для описания логических выражений различного уровня сложности. Логические выражения на этом языке описываются в виде контактов и катушек реле, которые широко применялись в области автоматизации в 60-х – 70-х годах ХХ века. Ввиду своих ограниченных возможностей язык дополнен такими средствами, как таймеры, счётчики и др.
4. Язык структурированного текста ST (Structured Text) относится к классу текстовых языков высокого уровня и предоставляет булевые и арифметические операторы, оператор ветвления if-then-else, операторы цикла. По мнемонике язык ST похож на Паскаль. На его основе можно создавать гибкие процедуры обработки данных. Язык структурированного текста является основным для программирования последовательных шагов и переходов языка SFC.
5. Язык инструкций IL (Instruction List) – текстовый язык низкого уровня. Выглядит как типичный язык Ассемблера. Язык IL позволяет создавать эффективные, оптимальные по быстродействию программы.
3.1.2 Краткое описание процедур программной реализации системы управления поливом
В соответствии с разработанным техническим обеспечением на систему управления управляющий контроллер ОВЕН ПЛК210 формирует дискретные выходные сигналы на открытие/закрытие клапанов.
Прикладное программное обеспечение управляющего контроллера разработано в среде CodeSys с использованием языков программирования ST, CFC и SFC.
Связь программного обеспечения управляющего контроллера с программным обеспечением верхнего уровня (АРМом оператора) осуществляется посредством ОРС-технологии с использованием OPC-сервера.
Прикладное программное обеспечение управляющего контроллера включает несколько взаимосвязанных процедур.
Процедура logik написана на языке CFC и осуществляет:
- управление электроприводами клапанов
- обработку сигналов от счётчиков воды.
Функциональный блок counter использует дискретный выход счетчиков для преобразования в количество прошедшей через счетчик воды, написан на языке ST.
Функциональный блок dozir, описывает алгоритм автоматического дозирования заданного количества воды, с формированием управляющего сигнала на клапан, реализован на языке SFC.
3.2 Разработка прикладного программного обеспечения локального автоматизированного рабочего места оператора (агронома) c использованием SCADA-системы
Целью создания системы является повышение экономических показателей за счет усовершенствования системы контроля и управления, оперативной сигнализации и протоколирования хода процесса полива, повышения технологической дисциплины.
Достижение этой цели обеспечивается внедрением на объекте современных средств автоматизации — программно-логического контроллера и персонального компьютера.
Поставленная цель достигается за счет:
- оперативного и высокоэффективного контроля и управления процессом полива;
- применения современных технических средств и методов контроля;
- точной, достоверной автоматической регистрации технологического процесса, что обеспечивает повышение технологической дисциплины;
- оперативной вычислительной обработки результатов функционирования технологических агрегатов;
- представления информации в удобном для дальнейшей обработки виде.
Система обеспечивает:
- заданную точность и достоверность контроля;
- дистанционное управление исполнительными механизмами;
- снижение количества предаварийных ситуаций за счет оперативной предупредительной цветовой и звуковой сигнализации;
- возможность анализа работы технологического оборудования и действий оператора за длительный промежуток времени;
- улучшение условий труда оперативного персонала;
- возможность наращивания функций.
3.2.1 Функции, регламент и режимы работы системы
АСУТП реализует комплекс информационных и вспомогательных функций.
Информационные функции:
- контроль и измерение технологических параметров;
- сигнализация отклонений параметров от установленных границ;
- ручной ввод данных;
- формирование и выдача данных оперативному персоналу в форматах протокола сообщений, режимных листов и протоколов аварийных ситуаций;
- вычисление косвенных переменных;
- сбор и накопление данных.
Управляющие функции:
- выдача управляющих воздействий с клавиатуры ПК на запорную арматуру и др. технологическое оборудование;
- изменение режима работы объекта в системе реального времени путем выбора соответствующего алгоритма управления.
Вспомогательные функции:
- автоматический перезапуск ПК при срабатывании WatchDog;
- оперативная перенастройка системы и реконфигурация программного обеспечения;
- подробная экранная помощь оператору;
- коррекция времени абонентов системы;
- осуществление переходов зима-лето;
- регистрация лица, осуществляющего управление объектом.
Основным режимом функционирования системы контроля является автоматизированный диалоговый режим.
АСУТП представляет собой двухуровневую систему.
В системе АСУТП используются:
- Контрольно-измерительные приборы, необходимые для контроля за ходом процесса;
- Исполнительные механизмы, необходимые для управления процессом;
- Контроллер — обеспечивает ввод, обработку и вывод всех сигналов датчиков и устройств системы.
- Блок бесперебойного питания (АБП), обеспечивающий работу системы при выключенной электросети.
- Станция оператора – на базе персонального компьютера в комплекте.
Станция оператора
Станция оператора реализована на базе персонального компьютера и функционирует под управлением операционной системы Windows. Станция оператора предназначена для сбора, обработки оперативных данных от УСО, хранения и отображения архивной информации по заданным параметрам.
На станции оператора реализуются следующие функции:
- индикация на экране монитора общей мнемосхемы процесса полива с динамической индикацией выведенных на них параметров, отображающих состояние определенных зон технологического объекта; для визуализации состояния процесса используется ряд стандартных кадров;
- индикация на экране и звуковая сигнализация выхода параметров за технологические и аварийные пределы, сигнализация аварийных ситуаций;
- дистанционное управление исполнительными механизмами;
- задание параметров ведения процесса;
- разграничение доступа к средствам системы управления по паролю;
- просмотр в журналах системы следующей информации:
- Сообщений о действиях операторов-технологов;
- Сообщений о работе комплекса технических средств контроля и управления;
- Просмотр истории параметров процесса на экране дисплея в виде графиков и таблиц и распечатки на принтере в табличном виде или как копии экрана;
- Просмотр архивов печатных документов на экране дисплее.
После запуска станции оператора, на базе пакета программ системы КРУГ-2000 (для Window), на экране монитора станции оператора появляется основное окно системы. Способы запуска станции оператора описаны в разделе «Запуск станции оператора».
Окно системы разбито на 6 областей отображения информации (Рисунок 3.1):
1 — основное меню,
2 — панель инструментов основного окна системы,
3 — панель сообщений,
4 — поле мнемосхем рабочего стола,
5 — панель выбора видеокадров,
2
1
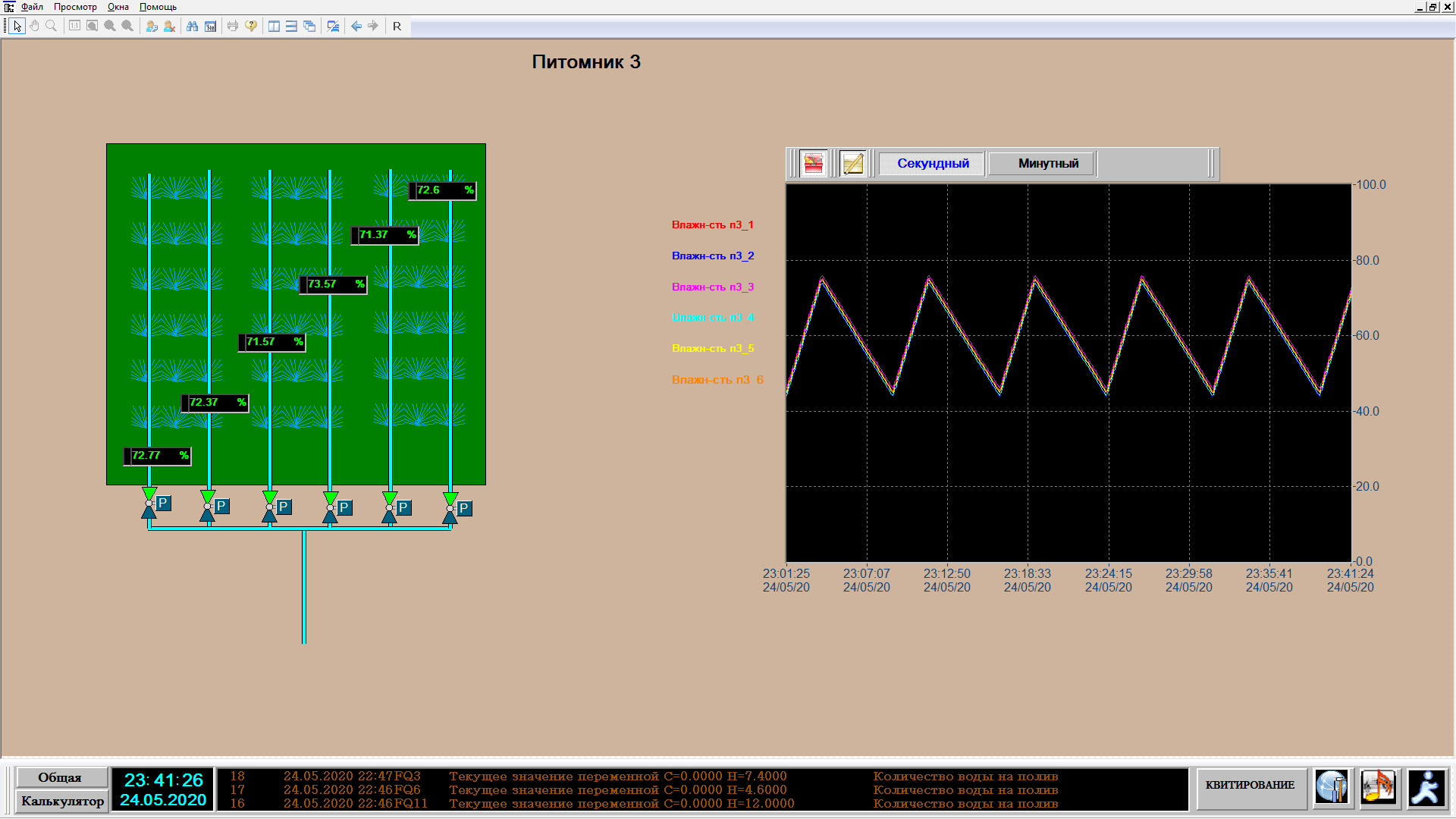
5
4
3
Рисунок 3.1 – Описание элементов окна системы
3.2.2 Основное меню системы
В верхней части окна системы располагается основное меню системы, предназначенное для выбора отдельных функций управления системой, и состоящее из следующих выпадающих подменю:
- Подменю «Файл» – предназначено для вывода на печать мнемосхемы текущего окна системы, предварительного просмотра выводимой на печать информации, для выбора принтера, определения параметров настройки принтера и выхода из системы,
- Подменю «Окна» – предназначено для работы с окнами в системе,
- Подменю «Помощь» – предназначено для получения справочной информации о функциях системы.
Выбор подменю и их функций осуществляется с помощью мыши или «горячих клавиш» — комбинаций клавиши «Alt» и подчеркнутой буквы, входящей в имя подменю.
Описание подменю «Файл»
Подменю «Файл» состоит из следующих подменю:
- Печать – вывод на печать изображения текущего окна системы с возможностью выбора принтера и параметров страницы,
- Предварительный просмотр – предварительный просмотр изображения текущего окна, выводимого на печать. В окне предварительного просмотра расположены кнопки управления режимом просмотра:
- Печать – вывод на печать изображения текущего окна,
- Приблизить – увеличение масштаба изображения для просмотра. По умолчанию на экран выводится вся страница целиком. Изменение масштаба изображения при просмотре осуществляется также и последовательными нажатиями левой клавишей мыши, при этом изображение будет меняться от минимального до максимального и обратно.
- Отодвинуть – уменьшение масштаба изображения для просмотра,
- Закрыть – выход из режима предварительного просмотра,
- Следующая страница – просмотр следующей страницы,
- Предыдущая страница – просмотр предыдущей страницы,
- Две страницы/Одна страница – режим отображения страниц в окне предварительного просмотра.
- Установка принтера – выбор принтера по умолчанию для печати изображения текущего окна,
- Выход – выход из процесса «Станция оператора». При установке прав доступа на выход из станции оператора (задаются в «Генераторе базы данных» и «Генераторе динамики»), данных пункт меню становится недоступным. В этом случае выход из программы возможен только с определенных видеокадров системы с соответствующими правами доступа. В данной системе выход осуществляется с видеокадра «Диагностика», при щелчке мышью на кнопке «Выход из системы».
Описание подменю «Просмотр»
Подменю «Просмотр» состоит из следующих подменю:
- Режим редактирования – реализует вызов мнемосхем, приборов управления, работа с функциями системы через панель инструментов и основное меню.
- Режим перемещения – позволяет перемещать фрагмента окна с помощью мыши (активен когда всё изображение не помещается в текущие размеры окна).
- Режим масштабирования – позволяет увеличивать масштаб изображения в активном окне.
- Масштаб 1:1 – позволяет отображать текущее окно в реальных размерах.
- Показать все – позволяет отображать изображение мнемосхемы в окне с учетом размеров окна.
- Отодвинуть – позволяет уменьшить масштаб изображения в активном окне.
- Приблизить – позволяет увеличить масштаб изображения в активном окне.
Описание подменю «Окна»
Подменю «Окна» состоит из следующих подменю:
- Каскад – расположение открытых окон мнемосхем каскадом, начиная от левого верхнего угла поля мнемосхем рабочего стола. При этом все открытые мнемосхемы (в случае многооконного режима отображения) располагаются каскадом сверху вниз и слева направо в порядке их открытия или активизации. Активное окно с мнемосхемой всегда располагается в самом верхнем слое области рабочего стола.
- Горизонтальная черепица — расположение открытых окон мнемосхем, с упорядочиванием окон сверху вниз,
- Вертикальная черепица — расположение открытых окон мнемосхем, с упорядочиванием окон слева направо,
- Упорядочить значки – упорядочивание расположения минимизированных окон мнемосхем вдоль нижней границы рабочего стола.
Описание подменю «Помощь»
Подменю «Помощь» состоит из следующих подменю:
- Вызов помощи – вызов справочной службы по функциям системы,
- О программе – вывод информации о текущей версии программы «Станция оператора».
3.2.3 Панель инструментов основного окна системы
В верхней части основного окна системы, под основным меню системы располагается панель инструментов системы в виде набора кнопок, с помощью которых выполняются стандартные функции системы КРУГ-2000 (для Windows). Вызов функций осуществляется щелчком левой клавиши мыши на соответствующей кнопке (Рисунок 3.2). При задержке курсора мыши на кнопке без нажатия клавиши, возле кнопки показывается всплывающая подсказка с именем функции, реализуемой с помощью данной кнопки.
![]()
Рисунок 3.2 — Панель инструментов системы
К функциям, выполняемым с помощью кнопок панели инструментов, относятся:
 — Переход в режим «Редактирование» из режимов «Перемещение» или «Масштабирование». В этом режиме осуществляется вызов мнемосхем, приборов управления, работа с функциями системы через панель инструментов и основное меню. Данный режим устанавливается по умолчанию при вызове мнемосхемы или выходе курсора за пределы поля мнемосхем рабочего стола (при возврате в поле мнемосхемы остается прежний режим). Форма курсора мыши в режиме «Управление» может быть нескольких видов, в зависимости от расположения курсора на экране:
— Переход в режим «Редактирование» из режимов «Перемещение» или «Масштабирование». В этом режиме осуществляется вызов мнемосхем, приборов управления, работа с функциями системы через панель инструментов и основное меню. Данный режим устанавливается по умолчанию при вызове мнемосхемы или выходе курсора за пределы поля мнемосхем рабочего стола (при возврате в поле мнемосхемы остается прежний режим). Форма курсора мыши в режиме «Управление» может быть нескольких видов, в зависимости от расположения курсора на экране:- форма курсора мыши в виде «стрелки» — , отображается по умолчанию,
- форма курсора мыши в виде «указательный палец» — , отображается при попадании курсора мыши в область экрана, в которой установлена какая-либо реакция системы на нажатие или отпускание клавишей мыши (например: вызов прибора управления, переход на другой видеокадр и т.п.).
- — Режим «Перемещение», предназначен для перемещения фрагмента окна с помощью мыши, в случае, когда всё изображение не помещается в текущие размеры окна (например, при увеличении или при нескольких открытых окнах), т.е. появляются полосы прокрутки в правой или нижней сторонах окна. Форма курсора для этого режима «ладонь» — .
- — Режим «Масштабирование», предназначен для увеличения масштаба изображения в активном окне. Каждый щелчок левой клавишей мыши в нужной точке активного окна приводит к увеличению изображения в окне, с центром, находящимся в точке, на которую указывает курсор мыши. Форма курсора для этого режима «лупа» — . Уменьшение, увеличение и возврат к исходному размеру изображения производится с помощью иконок, описанных ниже.
- — «Масштаб 100%» — отображение текущего окна в реальных размерах,
- — «Показать все» — отображение всего изображения мнемосхемы в окне с учетом размеров окна.
- — «Приблизить» — увеличение масштаба изображения в активном окне.
- — «Отодвинуть» — уменьшение масштаба изображения в активном окне.
- — «Доступ» – вызов функции регистрации пользователя в системе. Работа с данной функцией описана в пункте 3.3.3. (Регистрация пользователей в системе).
- — «Отмена доступа» – вызов функции выхода пользователя из системы. Работа с данной функцией описана в пункте 3.3.4. (Выход пользователя из системы доступа).
- — «Поиск переменной» – вызов функции поиска мнемосхемы по переменной.
- — «Номер мнемосхемы» – отображает номер мнемосхемы в заголовоке основного окна системы.
- — «Печать» — вызов функции печати изображения активного окна.
- — Вызов функции «Помощь».
- — «Вертикальная черепица» – расположение открытых окон с упорядочиванием их слева направо (в многооконном режиме).
- — «Горизонтальная черепица» – расположение открытых окон с упорядочиванием их сверху вниз (в многооконном режиме).
- — «Каскад» – расположение открытых окон каскадом (в многооконном режиме).
- — «Одно/Многооконный режим» – включение/отключение многооконного режима. В однооконном режиме каждое вызываемое окно мнемосхем закрывает предыдущее окно, при этом оно распахивается на весь экран. В многооконном режиме одновременно могут быть вызваны несколько окон, максимальное количество окон рабочего стола задается в Генераторе динамики. После вызова нескольких окон, они могут быть расположены одним из вышеназванных способов упорядочивания окон. В многооконном режиме приборы, вызванные с открытой мнемосхемы, будут оставаться на экране до её закрытия.
- — «Предыдущая мнемосхема» – переход на предыдущую вызванную мнемосхему или в предыдущее активное окно (для многооконного режима). Циановый цвет стрелки означает, что имеется история предыдущих вызовов мнемосхем (при запуске системы – цвет стрелки серый). Для данной функции зарезервирована комбинация «горячих клавиш» Ctrl+Shift+PgUP.
- — «Следующая мнемосхема» – переход на следующую мнемосхему в истории вызовов. Циановый цвет стрелки означает, что Вы находитесь в середине истории вызовов мнемосхем. При вызове нового окна, цвет стрелки изменяется на серый, так как в историю записывается новая запись, и Вы находитесь в конце истории. Для данной функции зарезервирована комбинация «горячих клавиш» Ctrl+Shift+PgDn.
- — «Перезапустить» — перезапуск графического интерфейса.
 , отображается при попадании курсора мыши в область экрана, в которой установлена какая-либо реакция системы на нажатие или отпускание клавишей мыши (например: вызов прибора управления, переход на другой видеокадр и т.п.).
, отображается при попадании курсора мыши в область экрана, в которой установлена какая-либо реакция системы на нажатие или отпускание клавишей мыши (например: вызов прибора управления, переход на другой видеокадр и т.п.).3.2.4 Панель сообщений
Панель сообщений предназначена для отображения четырех последних сообщений, зарегистрированных в протоколе событий системы. Формат сообщений состоит из номера и даты регистрации, времени регистрации и текста сообщения. Необходимое количество отображаемых строк сообщений устанавливается с помощью генератора динамики.
Для более подробного просмотра протокола сообщений необходимо щелкнуть левой клавишей мыши на окне сообщений (рисунок 3.3). Протокол сообщений также можно вызвать нажатием клавиши «Протокол сообщ. » на функциональной клавиатуре.
Текущий режим установки, а также отображаются текущие дата и время системы в формате: время — чч.мм.сс, дата — дд/мм/гггг.
Описание работы с данными мнемосхемами описано ниже в соответствующих разделах инструкции.
Рисунок 3.3 — Протокол сообщений
3.2.5 Видеокадры проекта
На видеокадрах изображена обобщенная схема процесса полива с отображением полей и параметров, состояния различного оборудования.
Рисунок 3.4 — Видеокадр «Общая»
На видеокадре «Маточник» отображается процесс поливки поля и параметров процесса во времени (рисунок 3.5).
Рисунок 3.5 — Видеокадр «Маточник»
В верхней части тренда отображаются кнопки переключения секундного, минутного трендов, открытия окна с трендом в табличном виде и кнопка вызова окна настройки тренда (рисунок 3.6).
Рисунок 3.6 — Выбор формы тренда
Окно Настройка тренда выбирается в меню «Настройка тренда» нажатием кнопки .
Данное окно можно перемещать по экрану с помощью мыши, для чего необходимо курсор мыши поместить в заголовок окна, нажать левую клавишу мыши и, не отпуская ее, переместить окно по экрану.
С помощью окна Настройка тренда можно просмотреть историю тренда, изменить шкалы тренда, отключать/включать перья и отключать/включать заливку одного или нескольких перьев (рисунок 3.7).
Рисунок 3.7 — Окно прибора настройки трендов.
В окне «Настройка тренда» используются следующие кнопки для работы с трендами:
В начало тренда. При нажатии на кнопку, на видеокадре отображаются тренды со значениями переменных для временного интервала, соответствующего максимальному времени смещения относительно текущего времени.
Быстрая перемотка назад. При однократном нажатии на видеокадре отображаются тренды со значениями переменных со смещением по времени назад на интервал, соответствующий выбранному в данный момент масштабу по оси времени, относительно времени отображения значений трендов в левом нижнем углу оси времени.
Перемотка назад. При однократном нажатии на кнопку на видеокадре отображаются тренды со значениями переменных со смещением по времени назад на интервал, соответствующий шагу оцифровки по оси времени, относительно времени отображения значений трендов в левом нижнем углу оси времени.
Перемотка вперед. При однократном нажатии на кнопку на видеокадре отображаются тренды со значениями переменных со смещением по времени вперед на интервал, соответствующий шагу оцифровки по оси времени, относительно времени отображения значений трендов в правом нижнем углу оси времени.
Быстрая перемотка вперед. При однократном нажатии на кнопку на видеокадре отображаются тренды со значениями переменных со смещением по времени вперед на интервал, соответствующий выбранному в данный момент масштабу по оси времени, относительно времени отображения значений трендов в левом нижнем углу оси времени.
В конец тренда. При нажатии на кнопку, на видеокадре отображаются тренды со значениями переменных для временного интервала, соответствующего текущему моменту.
Остановить обновление тренда. При нажатии кнопки обновление трендов на экране прекращается, что бывает необходимо при разборе ситуации, при этом кнопка изменит свой цвет.
Показать световое перо. При выборе данного пункта появится вертикальная линия, слева от которой появится окно с временем пера 22:29:00 , а поля в значениях переменных заполнятся. Обновление тренда при включении светового пера автоматически останавливается. Повторное нажатие отменяет режим светового пера.
Абсолютная\относительная шкала. При нажатии на эту клавишу групповой или одиночный тренд (если выбрано одно перо) отображается в относительной шкале, при отжатии в абсолютной шкале. Для группового тренда за абсолютную шкалу принимается наибольший диапазон шкалы параметра входящего в данную группу.
Закрепить окно настройки. После нажатия на эту клавишу окно настройки трендов не закрывается при переходах по видеокадрам.
Назначить все перья.
Удалить все перья.
Закрасить все перья.
Отменить закраску всех перьев.
Меню работы с перьями. В данном поле указывается список перьев и назначенный им цвет.
Красным крестиком показываются отключенные в данный момент перья, зелеными галочками включенные перья. По нажатию на них соответственно включается или выключается выбранное перо.
В квадратике показано, закрашено перо или нет. По нажатию на квадратик выбранное перо закрашивается или закраска отменяется.
При нажатии левой клавиши мыши на позиции, позиция выделится синим цветом и групповой тренд преобразуется в одиночный (в абсолютной шкале параметра). Для выхода из этого режима, нужно щелкнуть мышью в области включения/отключения пера данного параметра.
Тип тренда. При помощи данного меню производится оперативное изменение типа тренда: секундный, минутный, часовой. В данной версии не используется.
Поле изменения масштаба шкалы времени. В свойствах тренда задается Ширина шкалы времени (секунды). Значение в поле Мсшт.Т означает величину коэффициента масштабирования для временной шкалы. При увеличении коэффициента отрезок времени отображаемого тренда увеличивается, а сам тренд сжимается, т.к. увеличивается количество отображаемых точек. При уменьшении коэффициента – тренд растягивается. Изменение коэффициента происходит при нажатии на кнопки и .
При нажатии на кнопку значение коэффициента увеличивается, при нажатии на кнопку — уменьшается. Коэффициент изменяется в интервале от 0,1 до 16.
Поле изменения начала шкалы тренда. Для изменения значения необходимо установить курсор в поле ввода числового значения, нажать левую клавишу мыши, отредактировать числовое значение и завершить редактирование нажатием клавиши ВВОД (Enter).
Поле изменения конца шкалы тренда. Для изменения значения необходимо установить курсор в поле ввода числового значения, нажать левую клавишу мыши, отредактировать числовое значение и завершить редактирование нажатием клавиши ВВОД (Enter).
Поле изменения интервала времени просмотра. В данном поле отображается дата и время последней отображенной точки в окне тренда справа.
Изменить значение можно тремя способами:
- необходимо установить курсор в поле ввода числового значения, нажать левую клавишу мыши, отредактировать числовое значение и завершить редактирование нажатием клавиши ВВОД (Enter).
- необходимо установить курсор в поле ввода числового значения, при нажатии на кнопку значение увеличивается, при нажатии на кнопку — уменьшается.
- нажмите на кнопку на экране появится меню календаря. Выберите необходимую дату, месяц и число.
Установка текущего интервала времени.
Окно тренд в табличном виде выбирается в меню «Тренд в табличном виде» нажатием кнопки (рисунок 3.8).
Рисунок 3.8 — Окно просмотра группового тренда в табличном виде
Принципы отображения переменных
На видеокадрах контролируемые, регулируемые и управляющие переменные представлены в виде различных форм отображения, в зависимости от типа и состояния одной переменной или совокупности состояний нескольких переменных.
В зависимости от состояния контролируемых аналоговых и дискретных переменных, цвет состояния данных переменных и графические элементы мнемосхем, связанные с состоянием этих переменных окрашиваются в следующие цвета по приоритетам от высшего к низшему:
- Мигающий красный – выход текущего значения переменной за границу пpедаварийной сигнализации;
- Мигающий желтый – выход текущего значения переменной за границу предупредительной сигнализации;
- Мигающий синий – срабатывание диагностики по недостоверному значению переменной или какого-либо описателя базы данных, который имеет атрибуты сигнализации, связанные с недостоверностью данных (например: отсутствие связи по каналу связи с УСО);
- Мигающий зеленый – возврат в норму переменной, вышедшей за границу предупредительной или предаварийной уставки сигнализации, или имевшей состояние недостоверности по диагностике;
- Красный – после квитирования переменной, вышедшего за границу пpедаварийной сигнализации;
- Желтый – после квитирования переменной, вышедшей за границу предупредительной сигнализации;
- Зеленый – переменная в норме;
- Синий – после квитирования параметра, имеющего недостоверное значение;
- Белый – при снятой с опроса переменной, а также если переменная принадлежит к каналу связи, отключенному на данный момент;
- Циановый – при снятии сигнализации по переменной.
Принципы отображения аналоговых контролируемых переменных.
На видеокадрах мнемосхем для отображения контролируемых аналоговых переменных предусмотрено окно, на черном фоне которого отображается только значение и единицы измерения переменной (рисунок 3.9). Цвет текущего значения определяется цветом состояния переменной, описанным выше.
Рисунок 3.9 – Отображение контролируемых аналоговых переменных
При щелчке левой клавишей мыши на области текста в правой части окна прибор ВА, на экране появляется окно прибора «Прибор-Регистратор с трендом» (рисунок 3.10), на котором отображается текущее значение переменной в единицах измерения и линия барграфа, длина которого характеризует текущее значение переменной в процентах от диапазона измерения переменной.
Рисунок 3.10 — Прибор «Регистратор с трендом»
В приборе «Прибор-Регистратор с трендом» отображаются:
- позиция переменной, ее наименование и единица измерения,
- текущее значение переменной и барграф текущего значения переменной с оцифрованной шкалой (в соответствии с заданными в базе данных началом и концом шкалы). Под барграфом отображаются указатели нижних и верхних границ предупредительной (желтого цвета) и предаварийной (красного цвета) сигнализации по данному параметру.
- окно тренда по параметру, в котором отображаются: зеленым цветом — изменение текущего значения переменной по времени, красным и желтым цветом — границы предупредительных и предаварийных уставок сигнализации. В зависимости от выбранной глубины и цикла записи тренда, по оси времени отображается шкала времени в форматах чч.мм.сс (для секундного цикла записи) и чч.мм (для минутного цикла записи). Справа от окна тренда расположена ось значений со шкалой 0-100% от диапазона измерения переменной.
Принципы отображения работы запорных (отсечных) клапанов.
На видеокадрах мнемосхем для отображения работы запорных клапанов предусмотрено изображение клапана с индикаторами состояния и режима работы (рисунок 3.11).
Рисунок 3.11 – Отображение работы клапана
Цвет индикатора клапана определяет его состояние: зеленый – открыт, красный — закрыт.
Вызов прибора управления отсечным клапаном осуществляется нажатием левой клавиши мыши в поле изображения клапана (рисунок 3.12).
Рисунок 3.12– Прибор управления отсечным клапаном
На приборе отображаются кнопки выбора режима работы клапана (ручной, автоматический), кнопки открытия и закрытия клапана при работе в дистанционном ручном режиме, индикаторы состояния клапана (зеленый – открыт, красный – закрыт) и позиция клапана.
Выбранный режим работы клапана отображается нажатой кнопкой («Ручной», «Автомат») и подсвечивается зеленым цветом. Нажатая кнопка управления клапаном подсвечивается зеленым цветом.
4 НАПРАВЛЕНИЕ «ИНЖЕНЕРНОЕ ОБЕСПЕЧЕНИЕ ПРОМЫШЛЕННОГО САДОВОДСТВА НА ОСНОВЕ КИБЕР-ФИЗИЧЕСКИХ СИСТЕМ И РОБОТОТЕХНИКИ В ФОРМАТЕ «УМНЫЙ САД»
Анализ тенденций развития сельского хозяйства, изучение инноваций, оценка направлений формирования технологических платформ и укладов, прежде всего, в машинно-технологическом обеспечении приоритетных подотраслей сельского хозяйства, позволяет констатировать, что разработчики новых технологий и техники многие годы стремились решать эти вопросы путем увеличения мощности, ширины захвата, скорости, грузоподъемности, совмещения операций и других механических новаций. Дальнейшие разработки в этом направлении требуют значительных затрат времени, а инвестиции в такую технологическую и техническую модернизацию не обеспечивают адекватного роста эффективности сельскохозяйственного производства. Потребовалась реализация (внедрение) принципиально новых подходов к ведению сельского хозяйства и его машинно-технологическому обеспечению.
Это в полной мере соответствует программным заявлениям В.В. Путина, который в статье «Нам нужна новая экономика» (30 января 2012 г.) пишет: «Нам нужна новая экономика, с конкурентоспособной промышленностью и инфраструктурой, с развитой сферой услуг, с эффективным сельским хозяйством». Одним из эффективных и действенных инструментов решения этой стратегической для России задачи, как свидетельствует анализ, представленный в настоящей работе, является разработка инновационных технологий и техники для формирования машинно-технологической базы, которая обеспечит ускоренное развитие по созданию интеллектуального сельского хозяйства России.
Современное зарубежное «садовое и овощеводческое машиностроение» находится на более высоком уровне развития и охватывает весь спектр технико-технологических схем и вариантов технического оснащения промышленного садоводства и овощеводства (рис.4.1).
| Тракторы для промышленного садоводства
(Massey Fergusson, Goldoni, John Deere, Ferarri, Case, Kubota, New Holland и др.) |
|||
| Мощность: 30…90 кВт
Скорость min: 0,5 км/час Цена: 20 – 75 тыс. евро |
|||
| Тактико-технические характеристики и потребительские свойства | |||
|
|
||
|
|
||
|
|
|
|
|
|||
|
|||
Рисунок 4.1 – Аналоги и прототипы
Вместе с тем инженерное обеспечение промышленного садоводства на основе роботизированных систем позволит составить значительную конкуренцию импортному оборудованию как на отечественном рынке, так и за рубежом
Термин «безтракторное земледелие» – новый и, в настоящее время, не имеет точного и регламентированного определения. Также отсутствует точный перевод термина на английский язык. В авторском варианте перевод термина определен как «не тракторное земледелие» – «non-tractor farming».
Предметной областью использования безтракторного земледелия являются отрасли сельского хозяйства, в которых на выполнение технологических операций не требуется больших энергозатрат, таких как садоводство и овощеводство.
Так, по данным авторов, на выполнение самой энергоемкой технологической операции в садоводстве как выкопка саженцев требуется не более 10 кВт (на практике, для выкопки саженцев используются тракторы, с мощностью двигателя 90 кВт и более). Для наиболее распространенных «зеленых» операций, таких как окулировка, прищипка, кронирование, обрезка, ошмыгивание и др. требуется не более 1 кВт энергии.
В качестве энергетических средств для механизации работ садоводстве и питомниководстве в основном используются тракторы, снабженные передней и задней навеской, задним и передним валом отбора мощности.
Также, особенностью садовых тракторов является возможность реверсивного управления (для работы с вилочными и грейферными погрузчиками), герметичность кабины (для работы с опрыскивателями) и малые габаритные размеры по ширине (для работы в садах, имеющих уплотненную схему посадки 2,5-4,5 м).
Основным параметром типажирования тракторов для промышленного садоводства является их тяговый класс и эксплуатационная мощность, а именно:
- Малогабаритные тракторы одноосные (мотоблоки) тягового класса 0,1-0,2 (с тяговым усилием 0,3-5,4 кН и эксплуатационной мощностью 3-16 кВт);
- Малогабаритные тракторы двухосные (минитракторы) тягового класса 0,2-0,6 (с тяговым усилием 5,4-8,1 кН и эксплуатационной мощностью 16-32 кВт);
- Колесные тракторы общего назначения тягового класса 0,6-1,4 (с тяговым усилием 8,1-18 кН и эксплуатационной мощностью 32-94 кВт);
- Колесные и гусеничные тракторы общего назначения тягового класса 2 (с тяговым усилием 18-27 кН и эксплуатационной мощностью до 150 кВт для колесных и до 94 кВт для гусеничных тракторов);
- Высококлиренсные энергетические средства (ВЭС) тягового класса 0,6-0,9 (с тяговым усилием 8,1-12,6 кН и эксплуатационной мощностью до 94 кВт).
Широкий спектр тракторов обусловлен огромным разнообразием технологических операций и соответствующим им типам машин и орудий.
Так, отечественной Системой машин на 1986-1995 гг. только для садов экстенсивного и нормального типа предусмотрено 15 машинно-технологических комплексов, содержащих 70 наименований машин и выполняющих более 160 технологических операций.
Система машин республики Беларусь (утверждена в 2014 г.) для плодоводства предусматривает 11 машинно-технологических комплексов, содержащих 137 наименований машин и орудий.
Изложенные аспекты, а также эволюция тракторостроения на современном этапе развития, предопределяют изменение подходов и стратегии энергетического обеспечения технологических процессов и операций в сельском хозяйстве, в общем и садоводстве и овощеводстве, в частности.
Одним из перспективных направлений развития энергетического обеспечения является переход на, так называемое безтракторное земледелие, в основе которого лежат известные принципы и положения, а именно:
- принципы гравитационного и реактивного земледелия;
- принципы тягово-энергетической и энергетической концепции тракторного земледелия;
- принципы блочно-модульного формирования техники;
- электроприводных мехатронных систем;
- беспилотного транспорта;
- групповой робототехники.
Использование перечисленных принципов предопределяют синергетические свойства системы безтракторного земледелия.
На рисунке 4.2 представлены результаты предварительных исследований и концепты мобильных энергетических модулей в системе безтракторного земледелия.
Представленные концепты показывают широкие возможности при формировании энергетического обеспечения выполнения технологических операций в отрасли промышленного садоводства и овощеводства.
Доля инновационной составляющей при реализации безтракторного земледелия близка к 100%, так как на настоящий момент производство технолого-функциональных аналогов в России отсутствует.
При формировании системы «безтракторного земледелия» используются принципы блочно-модульного формирования техники, стратегии Unit Production (единичное и мелкосерийное производство) и полный переход на электроприводную схему управления движением технологических элементов машин и оборудования.
| Мобильное энергетическое средство (МЭС) е- JethroTull | |||||
| модуль е- JethroTull – трансформер | 1 – приводной мост
2 – понижающий редуктор 3 – низковольный эл/двигатель 4 – аккумуляторная батарея 5 – ДВС-генератор Мощность:
Скорость min: 0,01 км/час |
модуль е- JethroTull –
моноблок |
|||
| Варианты исполнения модулей е- JethroTull — трансформера | |||||
|
|||||
|
|||||
|
|||||
Рисунок 4.2 – Концепты мобильных энергетических модулей в системе безтракторного земледелия
Основные конкурентные преимущества:
Принцип блочно-модульного формирования техники обеспечивает реализацию различных схем и вариантов машин для различных запросов рынка: от кастомизированных/персонализированных и бюджетных вариантов до «навороченных» роботизированных схем (рис. 4.3 – 4.6).
| Самоходная садовая платформа легкого типа (легкий e-Shuttle) | ||||
| Мощность: 60 В, 21,2 кВт
Грузоподъемность: 1000 кг Скорость: 0,01-35 км/час Высота подъема трапов: до 2 м Ширина выдвижения трапов: до 3 м |
||||
|
||||
|
||||
|
||||
Рисунок 4.3 – Концепты и технический облик самоходных садовых платформ легкого типа
| Самоходная садовая платформа тяжелого типа (тяжелый e-Shuttle) | |||||||||
| Мощность: 48…75 В, 23,9…6,3 кВт
Грузоподъемность: 3000 кг Скорость: 0,01-35 км/час Высота подъема трапов: до 3 м Ширина выдвижения трапов: до 3 м |
|||||||||
| Комплектация и исполнение | |||||||||
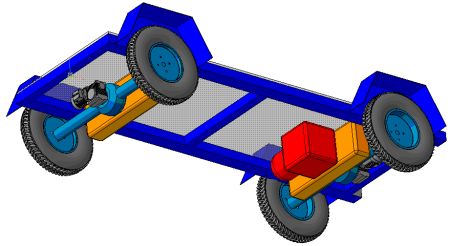 |
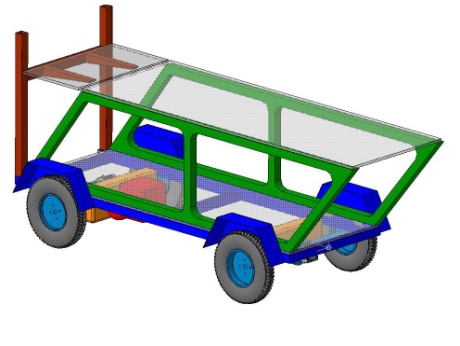 |
||||||||
|
|
|
|||||||
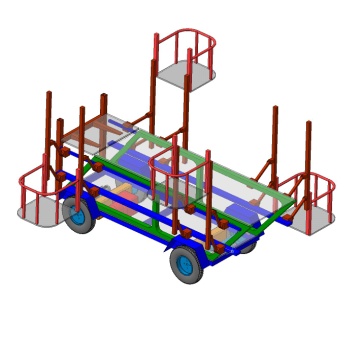 |
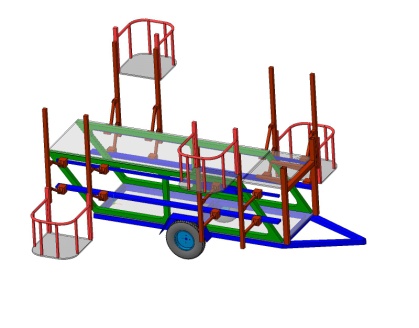 |
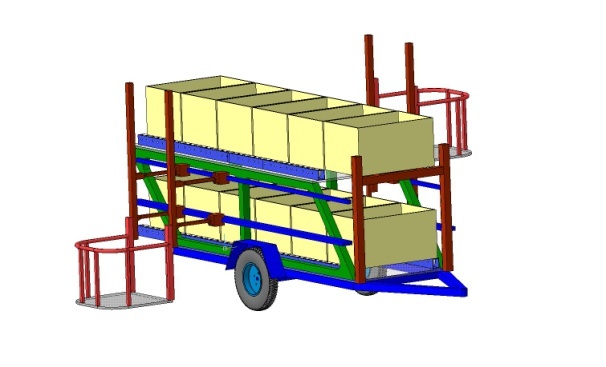 |
|||||||
|
|
||||||||
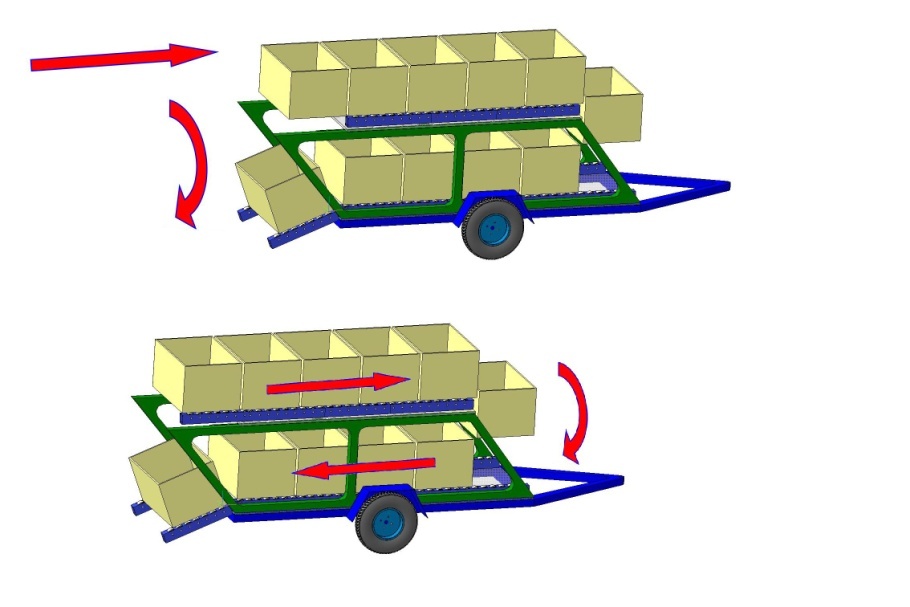 |
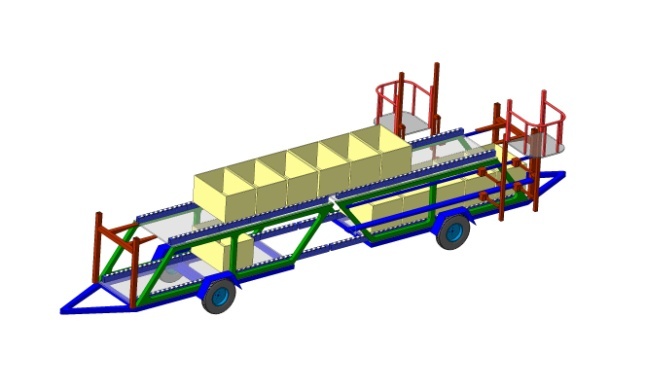 |
||||||||
|
|||||||||
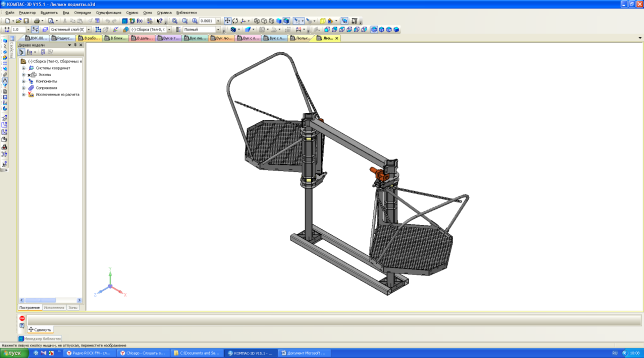 |
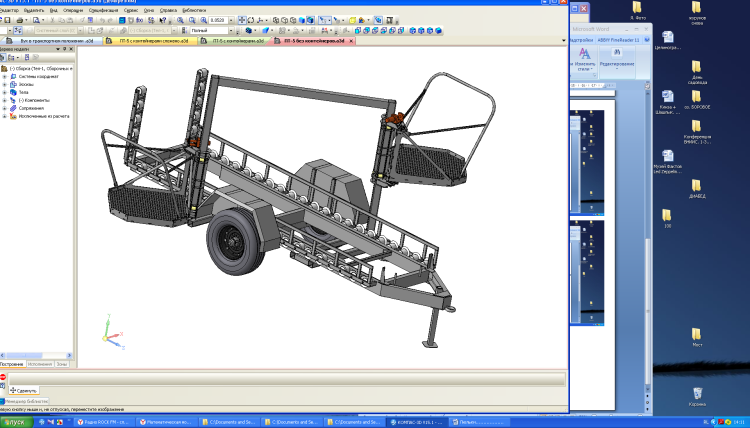 |
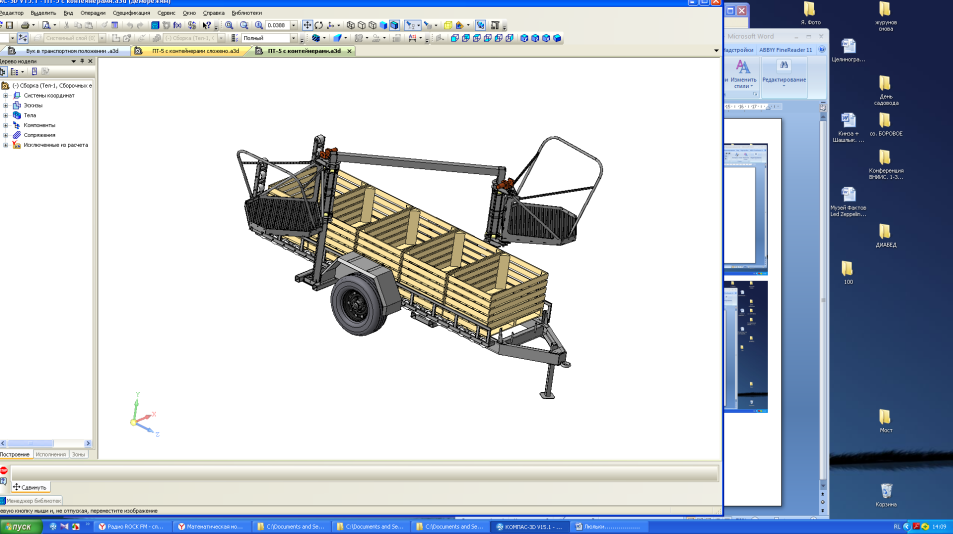 |
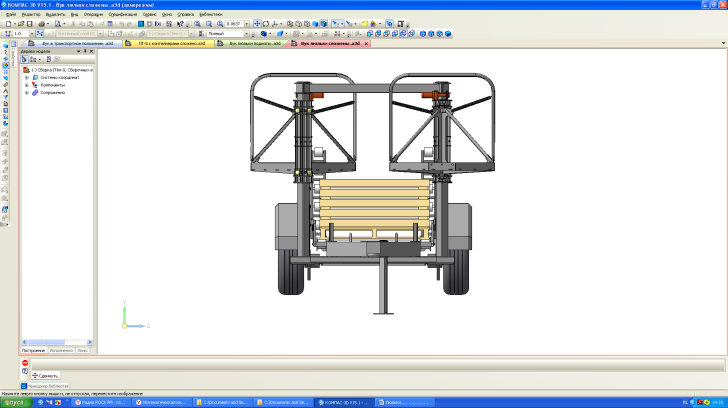 |
||||||
|
|||||||||
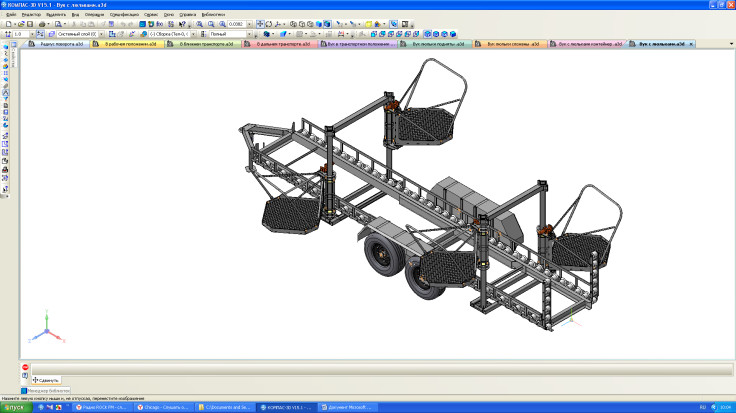 |
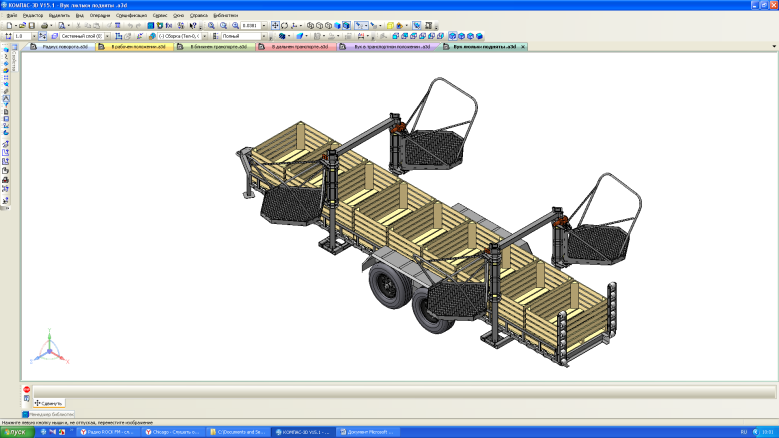 |
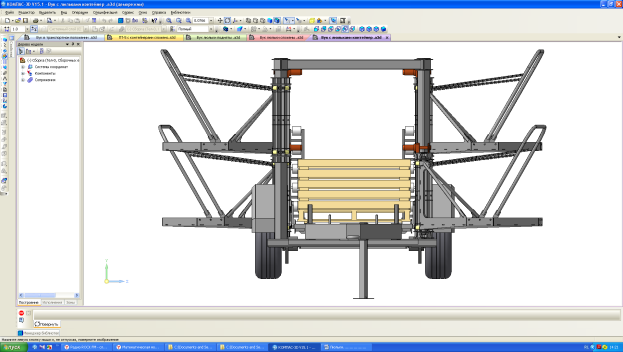 |
|||||||
Рисунок 4.4 — Концепты и технический облик самоходных садовых платформ тяжелого типа
| Высококлиренсный е-JethroTull | |||
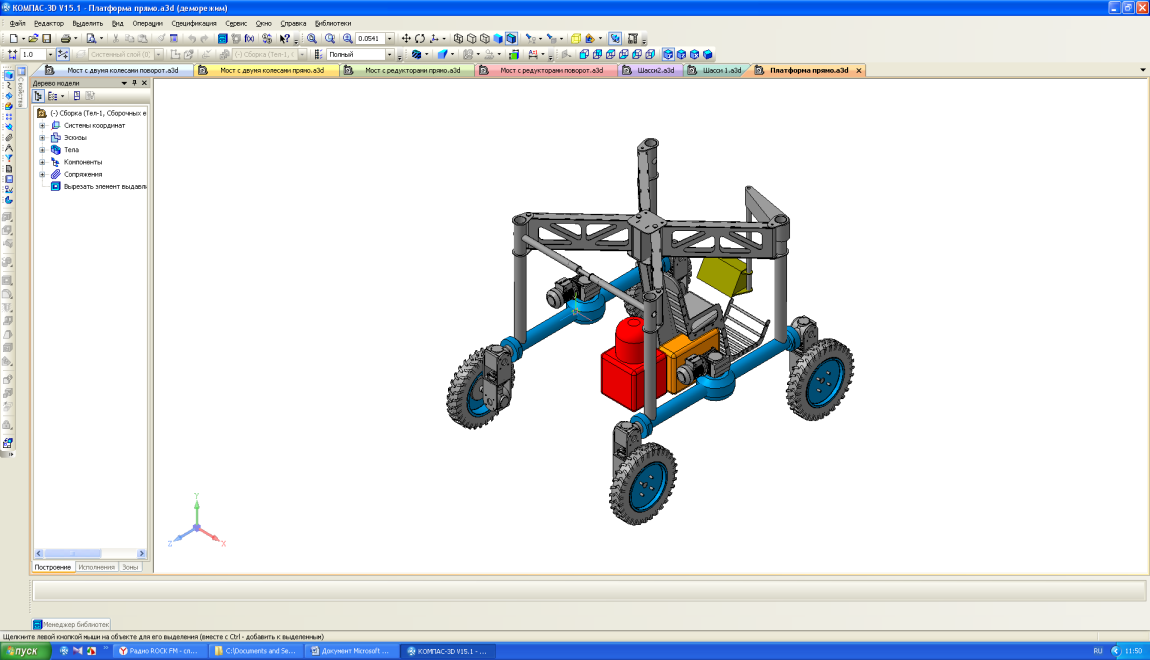 |
Мощность: 48…75 В, 1…23,9…6,3 кВт
Скорость: 0,01-35 км/час Высота портала: до 2,5 м |
||
| Исполнение и комплектация | |||
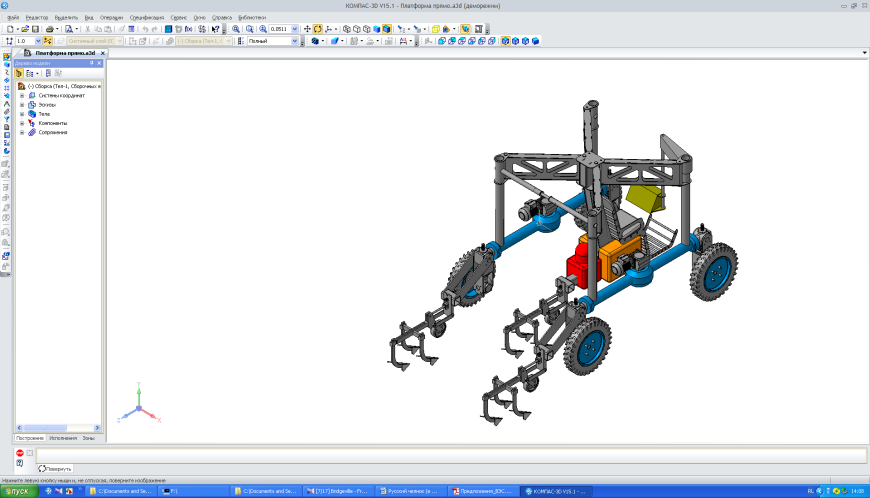 |
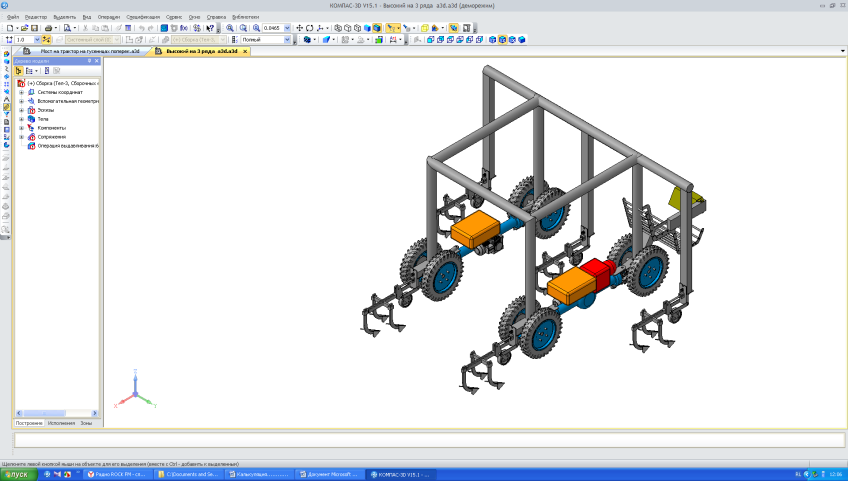 |
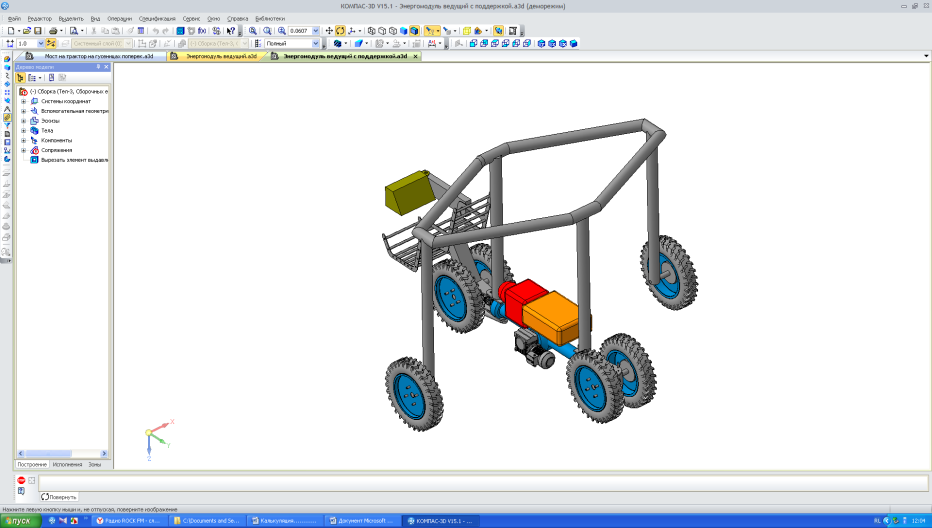 |
|
| Среднеклиренсный е-JethroTull | |||
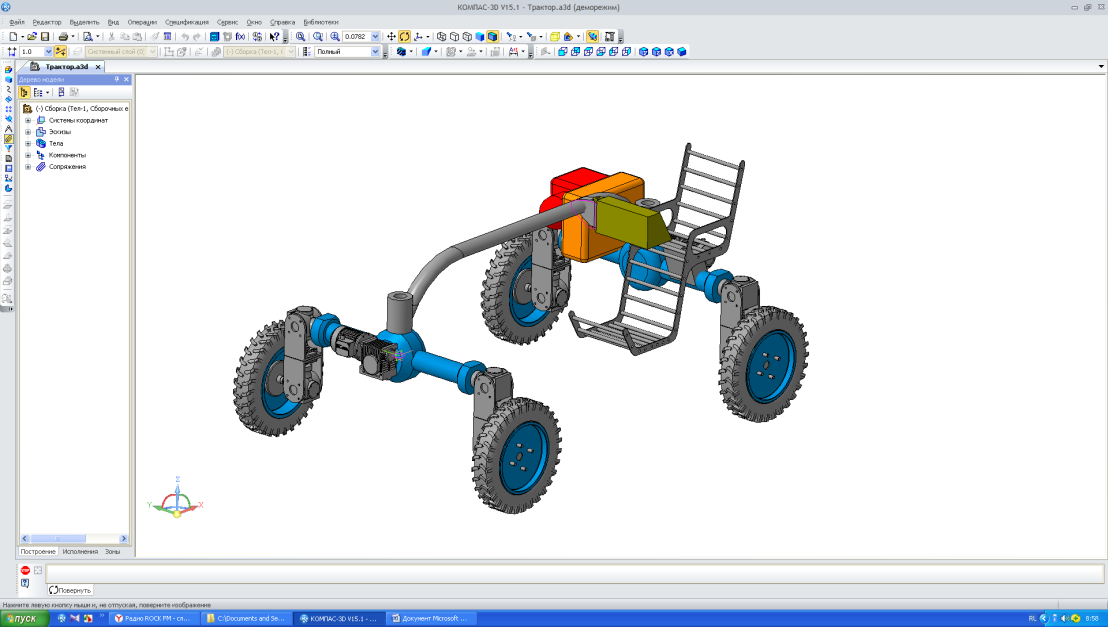 |
Мощность: 48…75 В, 1…23,9…6,3 кВт
Скорость: 0,01-35 км/час |
||
| Исполнение и комплектацияl | |||
|
|
компоновка |
|
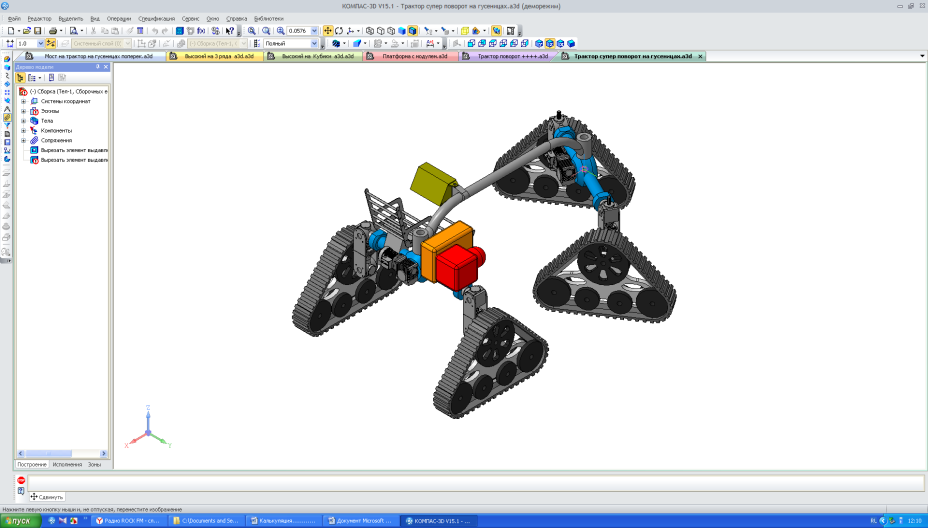 |
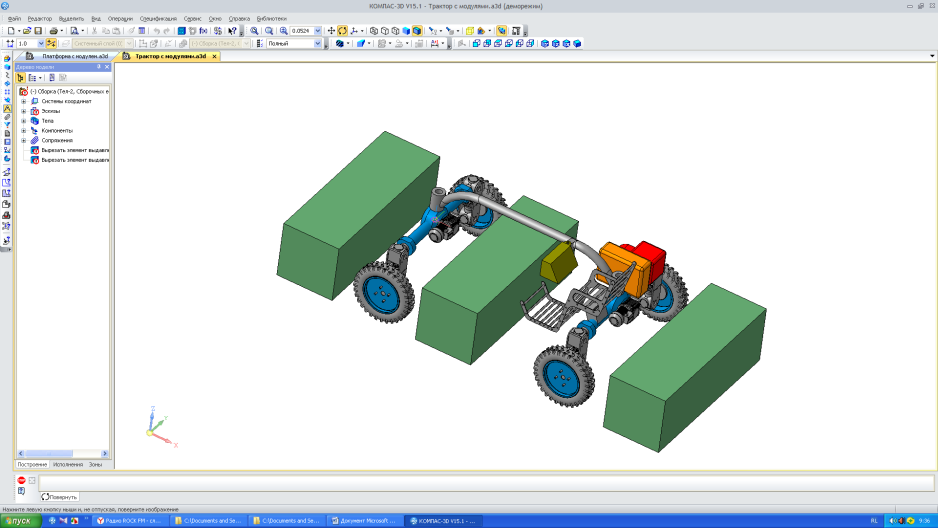 |
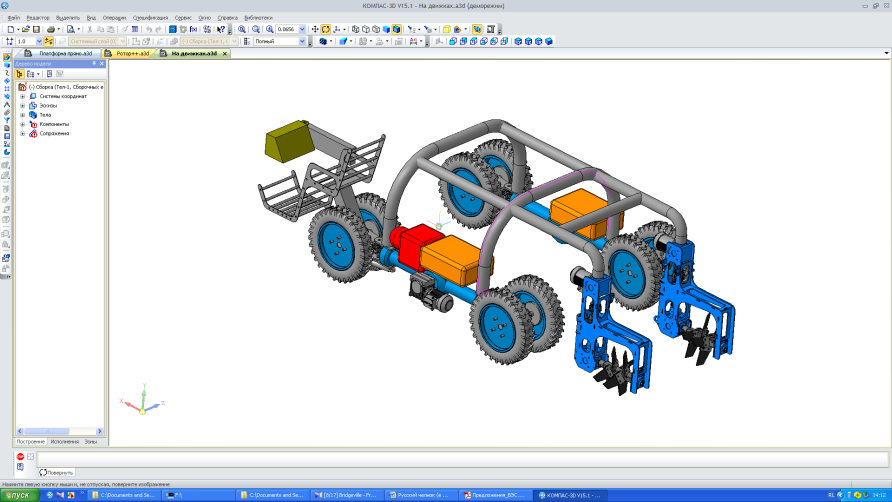 |
|
Рисунок 4.5 — Концепты и технический облик высококлиренсных модулей
| Технологический энергетический модуль (ТЭМ) е — JethroTull | ||||||
| Портальный е — JethroTull для выкопки саженцев | ||||||
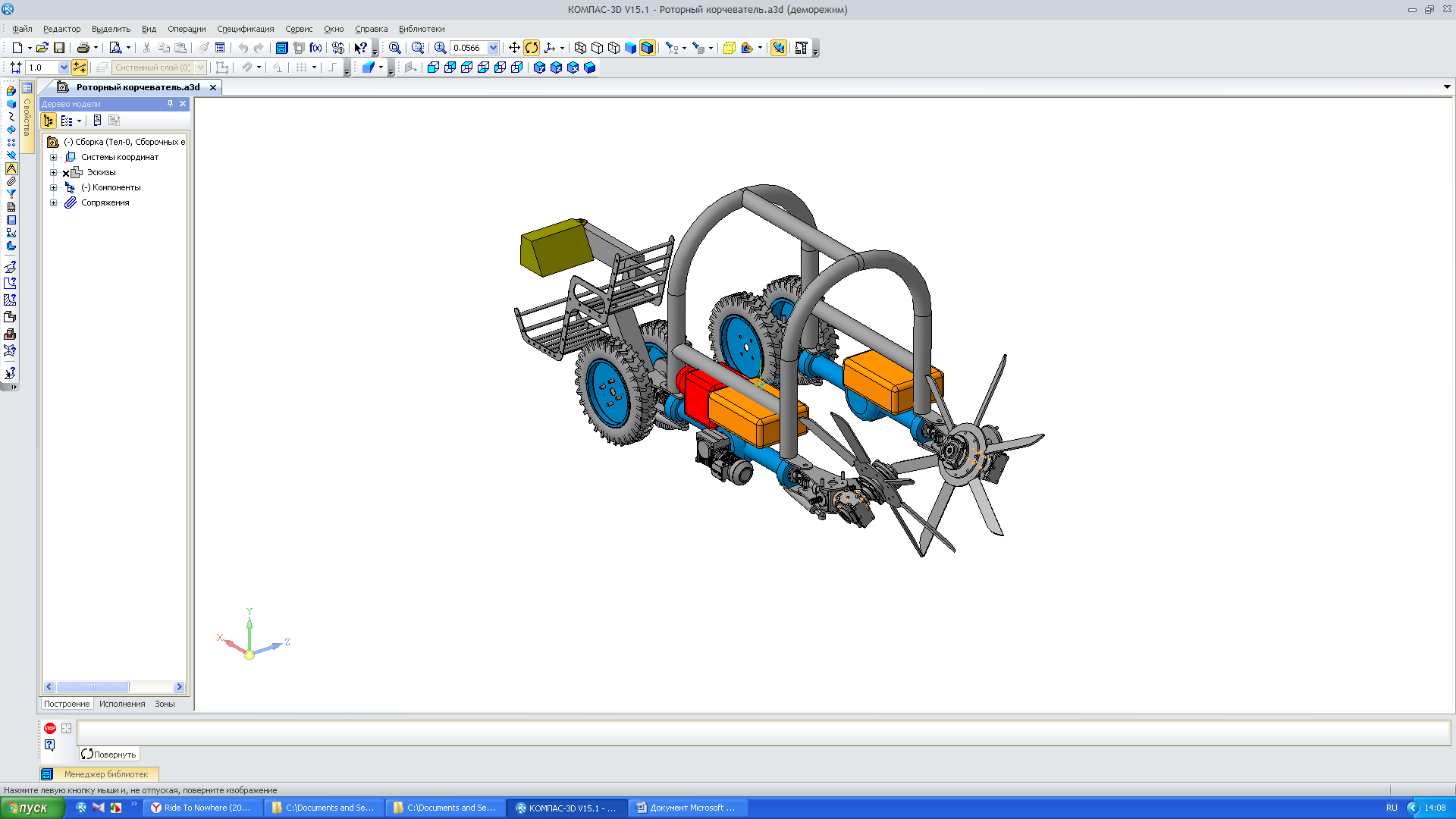 |
Мощность: 75 В, 26,3 кВт
Скорость: 0-3 км/час Глубина копания: до 0,3 м Высота саженцев: до 2,0 м |
|||||
| е – JethroTull с движителями-рыхлителями | ||||||
| 1 – энергетический модуль, 2 – движители-рыхлители | е – JethroTull с фрезой | |||||
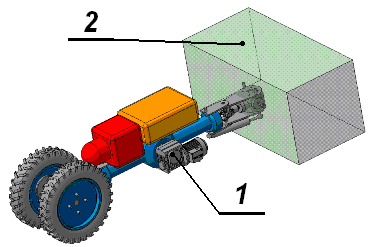 |
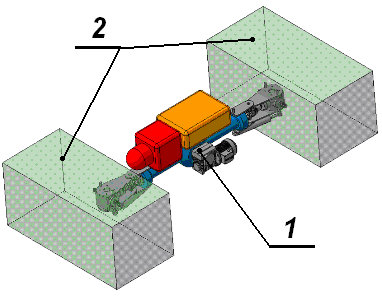 |
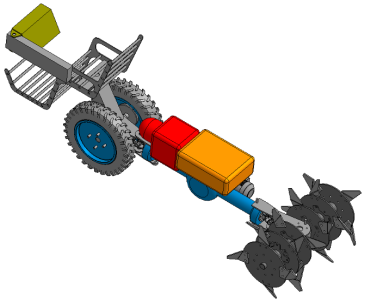 |
||||
| Критерии и индикаторы земледелия различных концепций | ||||||
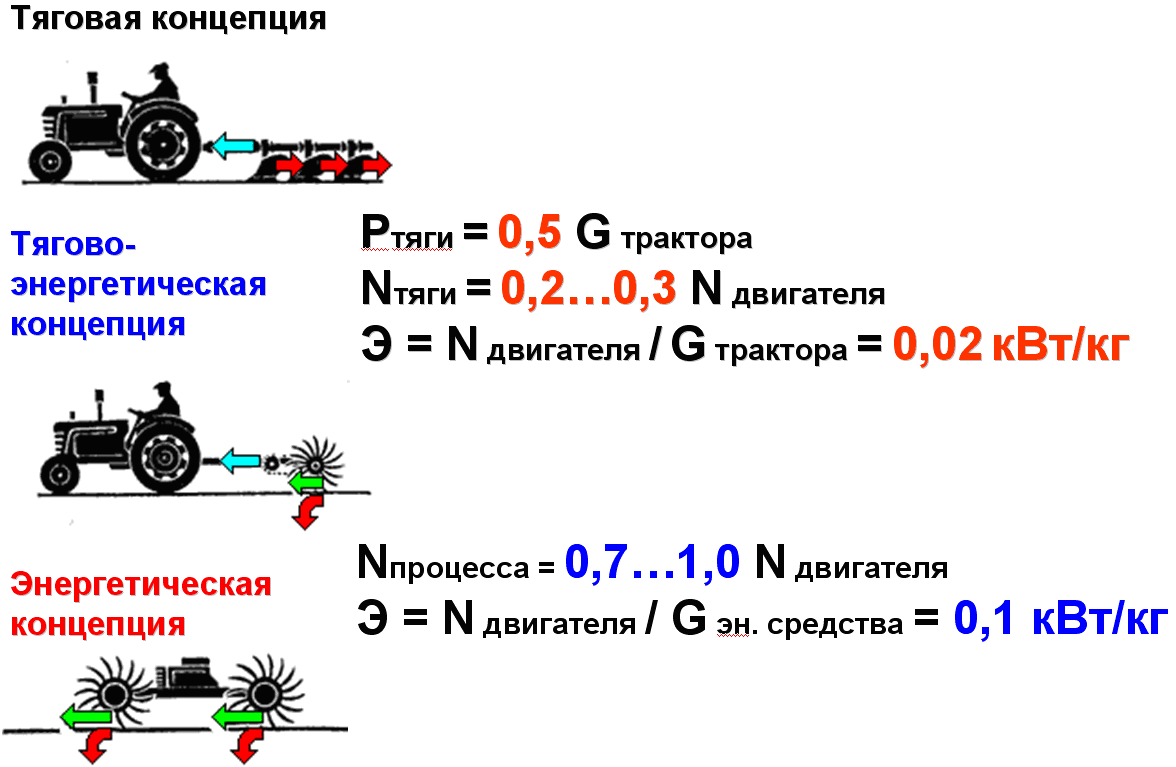 |
||||||
| Эволюция «безтракторного» земледелия на базе энергетической концепции | ||||||
| Ручное
земледелие |
Механизированное земледелие | Мехатронное
земледелие |
Роботизированное
земледелие |
|||
 |
 |
 |
 |
|||
Рисунок 4.6 — Концепты и технический облик технологических модулей
Стратегия Unit Production (единичное и мелкосерийное производство) обеспечивает производство/сборку техники для садоводства под конкретные кастомизированные/персонализированные требования заказчика как на региональном малом предприятии и/или дилерском центре, так и в условиях хозяйства.
Электроприводная схема управления движением технологических элементов садовых машин обеспечивает:
-
- высокую степень автономности каждого технологического элемента;
- широкий диапазон технологических и эксплуатационных характеристик;
- легкую управляемость;
- комфортные условия труда;
- экологичность;
- потенциальные возможности модернизации и последующей эволюции в части роботизации системы.
Сфера применения создаваемых продуктов
Потенциальные возможности технико-технологических идей «безтракторного земледелия» позволят легко адаптировать и сформировать конкурентные преимущества в других отраслях народного хозяйства (рис.4.3), а именно:
- Тепличные хозяйства.
- Ландшафтные и декоративные питомники.
- Хозяйства (питомники) лесоразведения.
- Фермерские хозяйства различной направленности.
- Коммунальные службы.
- Личные подсобные хозяйства населения.
Конструируемые изделия представляют собой автономные средства механизации, приводимые в движение электромоторами. В качестве источника электроэнергии используется дизельные электрогенераторы с накоплением электроэнергии в аккумуляторных батареях. Разнообразие вариантов средств механизации достигается модульной комбинацией конструкций движителей, их расположения на рамной конструкции и относительно оси движения, а также вспомогательных механизмов.
5. НАПРАВЛЕНИЕ «СИСТЕМА ТИРАЖИРОВАНИЯ И КОММЕРЦИАЛИЗАЦИИ ПРОЕКТОВ «УМНЫЙ САД»
5.1 Тест полигон «Умный сад»
В 2019-2020 гг. на опытном участке на площади около 1 гектара были заложены:
— маточник клоновых подвоев. Подвои 54-118 и Парадизка Будаговского.
— питомник. Первое и второе поля. Подвои 54-118 и 62-396.
— яблоневый сад на среднерослом клоновом подвое 54-118, хорошо зарекомендовавшем себя во многих регионах страны. Уплотненная для данного типа сада схему посадки деревьев – 4,0 м × 1,5-2,0 м (1250-1667 дер./га). Сорта Лигол и Антоновка обыкновенная. Формы кроны – русское веретено (без опоры), Бибаум (на железобетонных опорах).
— яблоневый сад на подвое Парадизка Будаговского – одном из лучших карликовых подвоев яблони. Экспериментальная, очень плотная схема размещения деревьев – 1,5 м × 0,7 м (9523 дер./га). Посадочный материал – кронированная разветвленная однолетка. Сорта Лобо и Хоней Крисп. Форма кроны – стройное веретено.
— яблоневый сад на подвое Парадизка Будаговского. Экспериментальная, очень плотная схема размещения деревьев – 1,5 м × 0,7 м (9523 дер./га). Посадочный материал – подвои первого товарного сорта с окулировкой на месте. Сорта Лобо и Хоней Крисп.
Инновационная система фиксации стволов:
— традиционные железобетонные опорные конструкции.
— инновационная опора в виде столбов из композитных материалов.
Тест-полигон «Умный сад» на опытном участке НОЦ им. В.И. Будаговского Мичуринского ГАУ
 |
 |
| Подвои 54-118 | Парадизка Будаговского |
 |
 |
| Интенсивный шпалерный сад на 54-118, схема 4 × 2 м | Первые плоды сорта Антоновка обыкновенная, крона Би-баум |
 |
 |
| Интенсивный безопорный сад на 54-118, схема 4 × 1,5 м | Первое плодошение сорта Лигол в интенсивном саду (на 54-118) |
 |
 |
| Суперинтенсивный сад на ПБ, 1,5 × 0,7 м (9523 шт на 1 га | Суперинтенсивный сад, плодоношение в год посадки |
 |
 |
| Плодоношение сорта Лобо в суперинтенсивном саду в год посадки | Суперинтенсивный сад, первые плоды Хоней крисп |
 |
 |
| Будущий суперинтенсивный сад, схема 1,5 × 0,7 м, на ПБ | Проведена высокая окулировка на ПБ |
 |
 |
| Участок тест-полигона – 1 поле питомника, заокулированные подвои | Участок тест-полигона – 2 поле питомника, Саженцы |
5.2 Инновации. Конкурентные преимущества
Маточник клоновых подвоев. Подвои 54-118 и Парадизка Будаговского (ПБ, В9).
Клоновые подвои яблони 54-118 (среднерослый) и Парадизка Будаговского (карликовый) широко известны в России и за рубежом. Основные конкурентные преимущества этих и других форм подвоев селекции Мичуринского ГАУ – очень высокая (беспрецедентная для клоновых подвоев) морозостойкость и зимостойкость корневой системы, а также высокая устойчивость к болезням, в том числе к бактериальному ожогу.
Насаждения планируется использовать как материальную базу для тиражирования ценных генотипов, а также как полигон для испытания инновационного комплекса машин по уходу за маточниками (выполнение операций окучивания, разокучивания, осеннего укрытия, весеннего раскрытия, удаления листьев, отделения отводков).
Все насаждения планируется оборудовать системой капельного полива с инновационными датчиками мониторинга и управления влажностью почвы в зоне расположения корней.
Интенсивный шпалерный сад на 54-118, схема 4 × 2 м.
Использована уплотненная ширина междурядий для среднерослого подвоя (54-118) – 4 м. Такая уплотненная схема может дать повышение урожая до 1,5 раз. Пригодна для тракторов с шириной колеи до 2 м. Для ослабления сильного роста при плотной посадке планируется применение специальных регуляторов роста.
Формируется инновационная в России для среднерослых подвоев крона Би-баум (двойное веретено). Крона широкая, направленная в сторону ряда (поэтому в ряду 2 м). В результате получим сплошную «плодовую стену». Такая крона позволит быстро заполнить площадь питания деревьев, в результате увеличить продуктивность с единицы площади и ускорение вступления в товарное плодоношение минимум на 1 год. Формирование Би-баум требует опоры, поэтому установлена шпалера на традиционной железобетонной опоре.
Используются сорта – Антоновка обыкновенная (контроль, эталон зимостойкости и морозостойкости) и Лигол (очень урожайный европейский сорт с плодами высокого качества).
Интенсивный безопорный сад на 54-118, схема 4 × 1,5 м.
Использована очень уплотненная (инновационная) схема для среднерослого подвоя (54-118), как в междурядьях, так и в рядах. Обычно такие схемы используют для полукарликовых подвоев (типа 62-396). Такая уплотненная схема может дать повышение урожая в 1,5-2 раза и ускорение вступления в товарное плодоношение на 1-2 года. Пригодна для тракторов с шириной колеи до 2 м. Для ослабления сильного роста при плотной посадке планируется применение специальных регуляторов роста.
Формируется известная в России веретеновидная крона Русское веретено. Подвой 54-118 в принципе не требует опоры, поэтому опора не предусмотрена.
Используются сорта – Антоновка обыкновенная (контроль, эталон зимостойкости и морозостойкости) и Лигол (очень урожайный европейский сорт с плодами высокого качества).
Суперинтенсивный сад на ПБ (В9), схема 1,5 × 0,7 м (9523шт./га).
Использована очень уплотненная (инновационная) схема посадки даже для карликового подвоя (Парадизка Будаговского), как в междурядьях, так и в рядах. Ширина междурядий 1,5 м в яблоневых садах до сих пор не применялась в мировой практике. Пригодна только для тракторов и орудий с шириной колеи не более 1 м.
Формируется известная в России и за рубежом веретеновидная крона Стройное веретено. Подвой Парадизка Будаговского при любых обстоятельствах требует опоры, поэтому предусмотрена проволочная шпалера на традиционной железобетонной опоре.
Используются сорта – Лобо (контроль, широко известный в России канадский сорт) и Хоней Крисп (новый урожайный американский сорт с плодами высокого качества).
Для закладки сада использован инновационный посадочный материал – кронированная разветвленная однолетка высокого качества, с развитыми боковыми генеративными веточками (7+). Цена на такие саженцы высокая (250-350 руб.), и при такой плотной системе размещения стоимость посадочного материала для закладки сада составит 2,5-3 млн. рублей на 1 га.
Будущий суперинтенсивный сад, схема 1,5 × 0,7 м, на ПБ.
Для значительного удешевления стоимости посадочного материала на закладку сада использованы отводки карликового подвоя яблони Парадизка Будаговского первого товарного сорта с окулировкой на месте.
Здесь также использована очень уплотненная (инновационная) схема посадки. Однако, при ценах на первосортный подвой 40-50 руб. стоимость посадочного материала для закладки сада составит 0,4-0,5 млн. рублей на 1 га (в 6-8 раз меньше, чем при закладке готовыми саженцами). Пригодна только для тракторов и орудий с шириной колеи не более 1 м.
Будет также формироваться веретеновидная крона Стройное веретено. Поскольку подвой ПБ требует опоры, предусмотрена инновационная система фиксации стволов в виде столбов и проволоки, изготовленных из специальных композитных материалов.
Будут использованы те же сорта – Лобо (контроль, широко известный в России канадский сорт) и Хоней Крисп (новый урожайный американский сорт с плодами высокого качества). В августе текущего года уже сделана окулировка подвоев этими сортами на высоте 20 см («высокая окулировка»).
Поля питомника.
Поля питомника планируется использовать как материальную базу для массового тиражирования ценных генотипов и привойно-подвойных комбинаций, а также как полигон для испытания инновационного комплекса машин по уходу за питомниками, в том числе на высоко клиренсных платформах.
В первое поле питомника высажены подвои яблони 54-118 (среднерослый) и 62-396 (полукарликовый).
Во втором поле на эти подвои привиты наиболее значимые в современном садоводстве зимние сорта яблони средней полосы России – Ветеран, Беркутовское, Лобо, Хоней Крисп, Спартан, Рождественское.
ЗАКЛЮЧЕНИЕ
Практическим результатом выполненных работ по проекту на момент даты отчета являются:
— по направлению «Нормативное регулирование цифровой трансформации промышленного садоводства»:
Интерактивная специализированная нормативно-справочная база данных «Машинные технологии промышленного садоводства (ТОП-модель)» в составе автоматизированного рабочего места АРМ «Садовод-технолог» предназначена для систематизации, поиска и хранения информации о машинных технологиях промышленного садоводства (ТОП-модель: «технологии» – «операции» – «приемы»).
Исходным языком разработки программы является Visual Basic for Applications (VBA), в качестве системы управления базами данных (СУБД) используется Microsoft Access 2003-2016. Отдельные модули программы разработаны на языке C# в среде Visual Studio 2017.
Основной функцией программы является накопление и систематизация информации по машинным технологиям промышленного садоводства (ТОП-модель) интерактивного поиска, фильтрации и сравнения результатов.
— по направлению «Сенсорные технологии в промышленном садоводстве»:
Проектно-конструкторская документация на систему дистанционного автоматического контроля влажности почвы и систему управления капельным поливом на основе безпроводного коммуникационного оборудования сети LoRaWAN отечественной компании «ВЕГА Абсолют».
При построении автоматизированной системы контроля и управления используется иерархическая информационная структура с применением на разных уровнях вычислительных средств различной мощности.
Для разработки данной автоматизированной системы контроля и управления выбрана трехуровневая структура комплекса технических средств (КТС).
— по направлению «Глобальная система интеллектуального управления и система поддержки принятия решений»:
Прикладное программное обеспечение локального автоматизированного рабочего места оператора АРМ «Садовод-управленец» на примере управления капельным поливом.
Целью создания системы является повышение экономических показателей за счет усовершенствования системы контроля и управления, оперативной сигнализации и протоколирования хода процесса полива, повышения технологической дисциплины.
Достижение этой цели обеспечивается внедрением на объекте современных средств автоматизации — программно-логического контроллера и персонального компьютера.
Поставленная цель достигается за счет: оперативного и высокоэффективного контроля и управления процессом полива; применения современных технических средств и методов контроля; точной, достоверной автоматической регистрации технологического процесса, что обеспечивает повышение технологической дисциплины; оперативной вычислительной обработки результатов функционирования технологических агрегатов; представления информации в удобном для дальнейшей обработки виде.
Система обеспечивает: заданную точность и достоверность контроля; дистанционное управление исполнительными механизмами; снижение количества предаварийных ситуаций за счет оперативной предупредительной цветовой и звуковой сигнализации; возможность анализа работы технологического оборудования и действий оператора за длительный промежуток времени; улучшение условий труда оперативного персонала; возможность наращивания функций.
— по направлению «Инженерное обеспечение промышленного садоводства на основе кибер-физических систем и робототехники в формате «Умный сад»
Техническое задание (ТЗ), технико-экономическое обоснование (ТЭО) и виртуальные прототипы (модели технического облика) роботизированных и мехатронных модулей машинных технологий на основе «безтракторного» земледелия в формате «Умный сад».
— по направлению «Система тиражирования и коммерциализации проектов «Умный сад»:
Технико-экономическое обоснование (ТЭО) и закладка тест-полигона «Умный сад», содержащий сад безопорный (160 деревьев); сад интенсивный (500 деревьев); сад суперинтенсивный (750 деревьев); маточник яблони (1100 растений); питомник яблони 1 очереди (2200 растений); питомник яблони 2 очереди (2200 растений); питомник яблони 3 очереди (2200 растений).
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
- Труфляк Е. В. Основные элементы системы точного земледелия / Е. В. Труфляк. – Краснодар : КубГАУ, 2016. – 39 с.
- Будущее отечественного садоводства – в интеграции науки и бизнеса [Электронный ресурс]. Режим доступа: http://www.michpravda.ru/articles/23483-budushchee-otechestvennogo-sadovodstva-v-integracii-nauki-i-biznesa.
- Точное земледелие: принцип работы и и перспективы [Электронный ресурс]. Режим доступа: https://xn--80ajgpcpbhkds4a4g.xn--p1ai/articles/tochnoe-zemledelie/.
- Точное земледелие – инновация в системе ресурсосберегающего земледелия [Электронный ресурс]. Режим доступа: http://mcx-consult.ru/d/77622/d/tochnoe-zemledelie.pdf.
- Интеллектуальная система управления процессами ирригации и фертигации в интенсивном садоводстве/ И.А. Елизаров и др. // Импортозамещающие технологии и оборудование для глубокой комплексной переработки сельскохозяйственного сырья. Материалы I Всероссийской конференции с международным участием. 2019. — С. 498-501.
- Индустриальный Интернет вещей. Перспективы российского рынка [Электронный ресурс]. Режим доступа: https://www.company.rt.ru/projects/IIoT/study_IDC.pdf.
- Краткий путеводитель по беспроводным технологиям «Интернета вещей». Часть 1. Сети, шлюзы, облака и протоколы [Электронный ресурс]. Режим доступа: https://zen.yandex.ru/media/id/5c8b8c6f8cbd2100b0f2f811/kratkii-putevoditel-po-besprovodnym-tehnologiiam-interneta-vescei-chast-1-seti-shliuzy-oblaka-i-protokoly-5c90da6ad1eee700b32ff81b.
- Обзор беспроводных технологий для интернета вещей [Электронный ресурс]. Режим доступа: http://skvot.2035.university/obzor-besprovodnyh-tekhnologij-dlya-interneta-veshchej.
- Как выбрать стандарт связи для сети IoT [Электронный ресурс]. Режим доступа: https://habr.com/ru/company/commandspot/blog/390825/.
- Краткий путеводитель по беспроводным технологиям «Интернета вещей». Часть 2. Ближний радиус действия [Электронный ресурс]. Режим доступа: https://controleng.ru/besprovodny-e-tehnologii/putivoditel-iot-2/.
- «Advances in IEEE 802.11 ah standardization for machine-type communications in sub-1GHz WLAN». Communications Workshops (ICC), 2013 IEEE International Conference on: 1269–1273, IEEE.
- Khorov, Evgeny; Lyakhov, Andrey; Krotov, Alexander; Guschin, Andrey. A survey on IEEE 802.11 ah: an Enabling Networking Technology for Smart Cities, (англ.)// Computer Communications: journal. — Elsevier, 2014.
- ZigBee VS Thread: Технологии построения беспроводных mesh-сетей [Электронный ресурс]. Режим доступа: https://www.compel.ru/lib/92808.
- Обзор протокола Z-Wav [Электронный ресурс]. Режим доступа: https://rus.z-wave.me/z-wave-knowledge-base/about-z-wave/z-wave-technical-overview.
- Краткий путеводитель по беспроводным технологиям «Интернета вещей». Часть 4. Большой радиус действия [Электронный ресурс]. Режим доступа: https://controlengrussia.com/besprovodny-e-tehnologii/putivoditel-iot-4/.
- LoRaWAN. Теория и практика [Электронный ресурс]. Режим доступа: https://zen.yandex.ru/media/isup/lorawan-teoriia-i-praktika-5bc597858359c800abc8009f.
- Беспроводные технологии мониторинга и управления в интенсивном садоводстве / И.А. Елизаров и др. // Импортозамещающие технологии и оборудование для глубокой комплексной переработки сельскохозяйственного сырья материалы I Всероссийской конференции с международным участием. 2019. С. 482-487.
- «СТРИЖ» — платформа для сбора данных на базе беспроводных LPWAN-сетей [Электронный ресурс]. Режим доступа: https://strij.tech/.
- Узкополосные технологии LPWAN (LoRaWAN, SigFox и др.) для построения сетей М2М и Интернета вещей [Электронный ресурс]. Режим доступа: http://new.rpls.ru/wp-content/uploads/2018/07/ONEPLAN-2018_Technologii_LPWAN_and_LoRa_TikhinskiiVO.pdf.
- Weightless System basic Overview [Электронный ресурс]. Режим доступа: https://www.rfwireless-world.com/Articles/weightless-system-overview.html.
- NB-IoT: как он работает? Часть 1 [Электронный ресурс]. Режим доступа: https://habr.com/ru/company/ru_mts/blog/430496/.
- Применение технологии LORA в интенсивном садоводстве /М.Н. Краснянский и др. // Цифровизация агропромышленного комплекса. Сборник научных статей. — 2018. С. 16-18.
- Беспроводные технологии: опыт и перспективы [Электронный ресурс]. Режим доступа: https://www.itweek.ru/mobile/article/detail.php?ID=204160.
- Сайт компании «Вега-Абсолют» [Электронный ресурс]. Режим доступа: http://vega-absolute.ru/.