
Титульный лист и исполнители
РЕФЕРАТ
Отчет 100 с., 1 кн., 50 рис., 7 табл., 94 источн., 2 прил.
защищенный грунт, овощные культуры, роботизированная платформа, лазерное излучение, защитные биопрепараты, мониторинг среды, фитосанитарное состояние, органическое земледелие
В 2020 году в ФГБОУ ВО Мичуринский ГАУ проводились НИОКР с целью разработать роботизированную платформу и цифровые технологии её применения для экологически безопасной защиты тепличных растений от болезней.Защита растений достигается за счёт периодической обработки растений низкоинтенсивным лазерным излучением и мелкодисперсным распылением защитных биопрепаратов на основе живых бактерий, активированных когерентным светом. Подобные устройства отсутствуют в отечественной и зарубежной практике.
Платформа полностью автономна, имеет встроенный аккумулятор, электропривод, обеспечивающий движение по труборельсам и бортовой компьютер. Отдельный микроконтроллер в реальном масштабе времени проводит измерения температуры, влажности, освещённости и концентрации углекислого газа. Эти данные поступают в компьютер, анализируются специально разработанной программой, которая по определённому алгоритму принимает решение (интеллектуальная функция) на выполнение тех или иных технологических операций . Имеются также сенсоры препятствия движению, что исключает наезд на персонал теплицы и вспомогательное оборудование. Для создания оптимальных условий облучения блок с лазерными модулями автоматически поднимается со скоростью роста тепличных растений (2-3 см в сутки). Применённые технические решения защищены тремя патентами РФ.
Разработанная роботизированная платформа имеет два рабочих органа: когерентное оптическое излучение и суспензия бактерий с антифунгальными свойствами. Проведенные исследования показали, что в качестве источника излучения целесообразно использовать лазеры, генерирующие в красной области спектра. Такое излучение вызывает фотоконверсию фитохрома в активную форму. Особое внимание уделено анализу статистических свойств квазимонохроматического света. Показано, что биологический эффект зависит как от пространственной, так и временной когерентности поля. Установлен критерий достаточности корреляционных свойств излучения: радиус корреляции и длина когерентности световых волн должны превосходить характеристический размер клеток облучаемых организмов.
Установлено, что для стимуляции биологических процессов длительность облучения должна быть не менее 5 с, что достигается выбором ширины светового пучка и скорости его перемещения.
Лазерное облучение позволяет повысить активность другого рабочего органа, суспензий бактерий из защитных биопреператов, за счетбольшей скорости роста клеток биоагентов, а также увеличения их антифунгальных свойств. Целесообразно подвергать обработке когерентным светом рабочие растворы БСЗР со сниженной концентрацией. Это позволяет достичь результатов, сходных с эффектом от применения данных средств по стандартной методике и обеспечит значительную экономию препаратов.
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ И ОБОЗНАЧЕНИЙ
БСЗР-биологические средства защиты растений
БП – биологические препараты
KfT — показатель фотосинтетической активности
КОЕ — колониеобразующие единицы
КГА – картофельно-глюкозный агар
phyB– форма фитохрома, поглощающая в красной области спектра
rcor – радиус корреляции поля квазимонохроматической волны, характеристический параметр пространственной когерентности
Lcoh– длина когерентности поля квазимонохроматической волны, характеристический параметр временной когерентности
= a/z– угловой радиус источника излучения
– длина волны излучения в центре спектральной полосы
– полуширина спектральной полосы (ширина спектральной полосы на половине высоты спектрального пика)
D–эффективный размер клетки
β – уровень значимости нулевой гипотезы
ВВЕДЕНИЕ
Робототехника является одной из наиболее динамично развивающихся отраслей экономики. Она охватывает различные сферы производства, включая сельское хозяйство. По данным Market Research Engine объём рынка сельскохозяйственных роботов в 2020 году составляет $16,8 млрд., а к 2025 достигнет $75 млрд., что в натуральном исчислении составит 600 тыс. шт. Лидерами в производстве роботов являются Япония, США и Китай (Carbonero, 2020). Россия не попала даже в первую двадцатку стран-производителей. Растёт не только количество «умных машин», но и постоянно расширяется круг решаемых ими аграрных задач (Roldán, 2018, Скворцов, 2016).
Потребность в робототехнике связана с дефицитом неквалифицированных кадров, особенно в период пандемии, высокой стоимостью и низкой производительностью ручного труда, нежеланием работников выполнять монотонные, тяжёлые или вредные технологические операции. Наша страна значительно отстаёт на рынке цифровых технологий и робототехники, что является стратегически опасным. В связи с этим Правительство России издало распоряжение от 19 августа 2020 г . №2129- р «Об утверждении Концепции развития регулирования отношений в сфере технологий искусственного интеллекта и робототехники на период до 2024 г.».
Низкая эффективность сельскохозяйственного производства во многом определяется значительной долей ручного труда. Необходимость его применения связана с пространственно-временной неопределённостью рабочей среды и технологических процессов. Для решения проблемы необходимы интеллектуальные устройства, способные самостоятельно изменять положение и функции своих рабочих органов, т.е. обладающие способностью к самоорганизации. Такими свойствами в наибольшей степени обладают роботизированные системы, которые начинают всё шире применяться в сельском хозяйстве. Их разработка для выполнения технологических операций в защищённом грунте является актуальной задачей. В рамках ГЗ МСХ проведены НИИР и ОКР, целью которых являлась разработка роботизированной платформы и цифровых технологий её применения для экологически безопасной защиты тепличных растений от болезней. На первом этапе исследований необходимо решить следующие задачи:
- Анализ научной и патентной литературы, обоснование технических решений, разработка методологии исследований.
- Разработать технические требования на экспериментальный образец роботизированной платформы интегрированной защиты овощных растений защищённого грунта от болезней.
- Разработать функциональную схему микропроцессорного управления роботизированной платформой.
- Провести оптимизацию параметров лазерного облучения растений и защитных биопрепаратов.
- Определить оптимальные дозы внесения активированых лазером защитных биопрепаратов.
- Разработка и испытание основных узлов роботизированной платформы.
1. АНАЛИЗ КОНСТРУКЦИЙ РОБОТИЗИРОВАННЫХ СИСТЕМ ДЛЯ ЗАЩИЩЁННОГО ГРУНТА
1.1 Области применения сельскохозяйственных роботов
Целый ряд интеллектуальных систем создан для садоводства (Zhang, 2019). В защищённом грунте также используют различные устройства на основе робототехники и интеллектуальной механики (Henten, 2002; Henten, 2004). В Австралии (Centre of Excellence for Autonomous Systems) разработана автоматически движущаяся по труборельсам (трубопроводам горячей воды) платформа, которая без участия человека проводит обработку тепличных растений пестицидами (Sammons, 2005).
Наибольшие затраты рабочей силы происходят на этапе уборки и сортировки урожая. Для исключения ручного труда необходимо решить ряд сложных инженерных задач: распознавание плода, определение его размеров, зрелости или качества, определение его координат, захват и отделение от растения, перемещение в транспортный контейнер. Исследования в этом направлении дают положительные результаты. В Японии (Kochi University of Technology) создан прототип устройства для автоматизированной уборки красного перца в теплицах (Kitamura, 2005). Испанская компания Agrobot разработала робот E-Series для сбора земляники. Он определяет зрелость плодов и с помощью манипуляторов отправляет их в контейнеры. На этой культуре производительность роботов ниже, чем у квалифицированных рабочих. Отставание может быть преодолено посредством оптимизации систем машинного сбора плодов (Woo, 2020).
Следующим этапом стал контроль взаимодействия человека и машины в технологическом процессе. Создаются роботы с функцией отслеживания и картографирования обслуживающего персонала в оперативной зоне (Masuzawa, 2017). Важную роль в робототехнике играют цифровые видеокамеры и системы распознавания образов, созданные на их основе. Современные разработки, созданные в Швеции, существенно повысили точность обнаружения различных биологических объектов (Ringdahl, 2019). Такого рода системы применяются в роботах типа Angus (фирма IronOx) и Genesis (компания FarmBot), предназначенных для ряда прецизионных (с точностью до 1 мм) операций в теплицах: посев, индивидуальный полив и опрыскивание, уничтожение сорняков, пересадка растений и т.д. Для решения этих задач всё больше используют интеллектуальные методы на базе нечётких множеств и нейтронных сетей (Gao, 2012). Широкий спектр применения роботов теплицах показан в таблице из работы (Загазежева, 2019) (даётся с сокращениями).
Таблица 1.1.
| Производитель,
объект |
Назначение | Характеристики,
функции |
| Guaresi SUPER G48 | Машина для сборки
помидоров |
Уборка урожая помидоров |
| RoboticHarvesting,
Сими-Валлей, Калифорния, США |
Машина для сборки
урожая ягод и овощей |
Робот для сбора урожая ягод и овощей, сбора информации. Автономное мобильное устройство составляет 3D-карту расположения овощей и фруктов, затем роботизированная рука срывает обнаруженный ранее плод и помещает на ленту конвейера |
| Wageningen UR (Университет и исследовательский центр) и Agritronics,
Нидерланды |
Интеллектуальная система по сбору урожая и распылению пестицидов | Исследование с целью разработки и поставки интеллектуальных систем для высококачественного сбора урожая: сладкий перец в Нидерландах, яблоки и виноград в Бельгии, навесное опрыскивание в Словении и точечное опрыскивание в Италии |
| Wageningen UR, Нидерланды | Робот-сборщик огурцов в теплице | Робот работает с овощами и фруктами в неструктурированной среде и при неблагоприятных климатических условиях, например, при высокой относительной влажности и температуре, а также меняющихся условиях освещения. Робот распознает отдельные огурцы, оценивает их зрелость и собирает спелые плоды |
| Agrobot, Уэльва, Испания | Agrobot SW6010 andAGSHydro, гидропонный аппарат для выращивания и сбора урожая клубники | Гидропонное выращивание ягод клубники и сбор спелых ягод из гидропонных систем. Уборочная машина с 60 роботизированными руками. |
| Japan’s National Agricultural and Food Research Organization,
Япония |
Сельскохозяйственный робот для сбора клубники. Может использоваться для сбора разных плодов, произрастающих в оранжереях | Движение по оранжерее вдоль гряд с земляникой, поиск ягод, аккуратное срезание их с веток и «нежное укладывание» их в поддон. Максимально точное определение места нахождения ягод в пространстве благодаря наличию двух камер. Определение роботом степени зрелости ягод по цвету при помощи специально разработанной компьютерной программы. При созревании ягоды на 80% — подача сигнала манипулятору для среза ягоды. Использование робота позволяет сократить время уборки урожая на 40%. Срез одной ягоды занимает 9 секунд. Наличие режима круглосуточной работы. |
| Wall-YE V.I.N., Франция | Сельскохозяйственный робот — виноградарь | Робот передвигается на четырехколесной платформе. Оснащен двумя специальными манипуляторами и модулем GPS, позволяющем ему самостоятельно передвигаться. За все действия робота отвечает специальная программа, которая со временем запоминает особенности каждого конкретного растения на винограднике и составляет план ухода за ними. Wall-YE V.I.N. способен обрабатывать до 600 виноградных лоз в сутки. Весит аппарат 20 кг, в автоматическом режиме выбирает для себя направление, при помощи искусственного интеллекта решает, чем заняться в тот или иной момент. Двигаясь от одной лозы к другой, Wall-YE анализирует состояние растения, фотографирует его, а потом предпринимает конкретные действия. |
| Wall-YE,
Франция |
Wall-YE 1000 mobile — робот для обрезки винограда | Автономная обрезка винограда |
| Cropbs «Clever robots for crops» (CROPS) | Робот-манипулятор сборщик сладкого перца «Sweeper» | Робот, осуществляющий автономный сбор спелых фруктов и овощей в рамках теплицы. Базовая часть робота состоит из несущей платформы, на которой расположена рука робота с конечным эффектором (рабочим органом) для захвата плода, а также установлены компрессор для пневматики, управляющая электроника, компьютеры и датчики для фруктов и обнаружения препятствий. |
| Naio Technologies, Тулуза, Франция | Полевой робот NaioTechnolo-gies Oz | Автономный электротрактор, который может быть использован как для сбора, так и для транспортировки урожая. Oн функционирует как самоходный роботизированный инструмент. Робот для прополки. |
| Салах Сакар, фа-культет инженерных и информационных технологий,
Университет Сиднея, Австралия |
Робот-овощевод «божья коровка» («Ladybird» farm’bot ) | Работает на солнечных батареях, полностью автономно. Робот оснащен видеокамерами, сенсорным оборудованием, лазерными дальномерами и анализаторами спектра. При помощи всех этих функций он собирает необходимую информацию о растении, распознает вредителей и начинает процесс прополки. «Божья коровка» снабжена манипулятором для прополки и других операций. Робот самостоятельно выезжает на грядку и производит высадку овощей без регулировки настроек, устройство анализирует информацию и определяет потребности растений в питательных веществах |
| VisionRobotics, Калифорния, США | Робот-сборщик апельсинов (Orange-harvester) | Садовый робот обеспечивает проход через сад и сбор зрелых апельсинов, грейпфрутов, яблок с деревьев. Робот, используя стереоскопические камеры высматривает и идентифицирует плоды на деревьях. По сути, он создает трехмерное изображение всего оранжевого дерева. Далее эта информация используется, чтобы восемь мягких захватов робота изящно сняли каждый апельсин. Робот состоит из двух моделей: один с системой видения, а другой — с захватами для сбора апельсинов. |
| Университет
Линкольна, Великобритания |
Робот для сборки урожая брокколи | Проект использования техноло-гии 3D-видения. Полностью автоматизированная робототехническая система уборки урожая брокколи, позволяющая снизить затраты на производство |
| RHR (Right Hand Robotics) | Робот-манипулятор для сбора овощей и фруктов | Роботизированная рука, позволяющая захватывать и перемещать заданные объекты. |
| Blue River Technology | Компьютерное зрение | Компьютерное зрение сельскохозяйственных роботов для борьбы с сорняками. |
| AgPixel | Специальная камера с инфракрасным фильтром | Специальная камера может быть использована для обнаружения воды, питательных веществ, болезней и атак насекомых еще до того, как они становятся даже заметными для человеческого глаза. Продукты оценки состояния здоровья растений AgPixel получены путем анализа дифференциального коэффициента отражения видимого и ближнего инфракрасного света из листьев растений. Анализ путей дифференцированного отражения растениями света используется для получения стандартизированных индексов различия растительности (NDVI), который использовался учеными, анализирующими спутниковые снимки в течение многих лет для изучения состояния растений. |
| Soft Robotics Inc. | Роботизированный захват | Мягкая роботизированная модульная система с интеллектуальным навыком по захвату в ответ на команду. |
| Harvest Automatization | Сельскохозяйственный робот | Робот, переставляющий горшки с саженцами в теплицах. |
| Harvest CROO Robotics, Флорида | Робот для сбора клубники | В рамках прототипа робота используются коммерчески доступные датчики видения и программное обеспечение, которые позволяют машине распознавать только спелые ягоды клубники, готовые к сбору. Модель основана на сочетании скорости и издержек. Изобретатели рассчитывают, что робот сможет убрать спелые ягоды с одного куста клубники, который может содержать от 3 до 5 таковых, за 5 секунд. Предполагается автономность работы робота в течение длительного времени весь — день. Сборщик имеет модульную конструкцию, так что любые сбои могут быть устранены путем отсоединения и замены поврежденных частей. |
1.2. Патентный обзор сельскохозяйственных роботов
Проведенный патентный поиск по международным базам данным в свободном доступе позволил выявить следующие направления при разработке конструкции и практического использования роботов сельскохозяйственного назначения, в частности, теплиц:
1. Как правило, роботы содержат шасси, приводное устройство, рабочий узел, силовой узел, систему позиционирования и систему управления.
2. Рабочий узел содержит рабочую платформу, на которой размещаются ящики, емкости или устройства, например, насос высокого давления или ультрафиолетовые бактерицидные лампы, распылители тумана и т.п. рабочие органы (в зависимости от назначения робота), выдвижной или вращающийся кронштейн.
3. Силовой узел предназначен для обеспечения движения робота и, как правило, включает стойку (бокс), дифференциальную зубчатую передачу, амортизатор, передние и задние колеса.
4. Роботы обязательно снабжают системой позиционирования, используя различные электронные устройства.
5. Системы управления предназначены для контроля его работы и размещенных на нем рабочих органов а также для сбора и передачи информации.
6. В качестве энергоносителя используют аккумуляторы, сетевое питание (по проводу) и солнечные батареи.
7. Наиболее распространенные сферы применения роботов — это защита растений, рыхление почвы и полив, сбор урожая, прополка сорняков, сбор информации о состоянии растений и диагностика поражений.
8. Более 90% патентов на робототехнические системы принадлежат КНР.
Сычуаньским сельскохозяйственным институтом (Китай) запатентован робот — защитник растений для теплиц патента (Патет № CN109122644, 2019), который осуществляет с помощью ветроэнергетического установки осуществляет распыление пестицидов на тепличные растения в автоматическом режиме, существенно снижая вредное действие пестицидов на работников. Робот может быть локализован с помощью системы позиционирования, его работа полностью контролируется дистанционно, система управления обеспечивает гибкий график работы робота.
В Китае запатентован интеллектуальный робот для рыхления и полива почвы, для дальнейшей посадки овощей (Заявка № 102016000527004, 2016). Робот имеет системы самостабилизации рабочей платформы и пригоден для работы на неровных участках посадки овощей в теплицах. Основная функция, выполняемая в автоматическом режиме — рыхление почвы, но может также использоваться и для полива овощей.
Китайский сельскохозяйственный университет разработал роботизированную систему целевого распыления средств защиты растений (Патент № CN 101947503, 2011). Робот имеет систему машинного зрения, с помощью которой диагностируется наличие и степень развитости заболевания тепличных растений. Информация передается в системы управления, которая в зависимости от локализации и тяжести заболевания, управляет местоположением манипулятора и количеством включаемых сопел опрыскивателя. Это позволяет эффективно снижать расход пестицидов, улучшать качество продукции и уменьшает загрязнение окружающей среды.
Северо-западный университет Китая разработал робот-сборщик для теплиц (Патент № CN 108908308, 2018). Он снабжен подбирающей механической рукой, шасси подвески, колесные пары. Подбирающая механическая рука расположена на шасси подвески через механический рычаг, который может поворачиваться на 360о относительно горизонтальной грани шасси подвески. Модули ведущих колес соединены с рамой через упругие регулировочные узлы. Каждый такой узел содержит демпфирующую пружину; верхний и нижний концы каждой демпфирующей пружины вращательно соединены с соответствующей верхней или нижней соединительной пластиной, причем верхние соединительные пластины вращательно соединены с рамой, а нижние соединительные пластины вращательно соединены с модулями ведущих колес. Такая конструкция стабильна в движении, гибка в повороте и захвате и обладает высоким демпфирующим эффектом.
Шанхайский университет предлагает роботизированную систему автоматического переключения транспортной системы теплицы для движения робота (Патент № CN 106171651, 2016). Система содержит компьютерную систему управления с беспроводном модулем 1, систему управления транспортным средством с беспроводным модулем 2, контроллер, датчик, контактор и элетротермическое реле. Система помогает роботу автоматически менять гусеницы, осуществляет автоматическую коммутацию при его движении и повышает степень автоматизации современных сельскохозяйственных теплиц.
В Нанкинском лесотехническом университете (Китай) разработали оригинальный робот для сбора гусениц с растений, выращиваемых в теплицах (Патент № CN 108450436, 2018). Он снабжен видеокамерой и трехмерным лазерным измерительным устройством, определяющим расстояние между гусеницей, листовой поверхностью и исполнительным приводом — захватом. Отмечается высокая точность обнаружения растений и отсутствие их повреждения.
Фирма Asesoresy Tech Agricolas SA (Испания) получила европейский патент на функциональную схему автономного робота для нанесения фитосанитарных продуктов в теплицах путем фумигации и\или распыления без физического присутствия оператора (Патент № ES 21055800, 2001). Робот имеет шасси, размер которого может быть изменен в зависимости от того, как он будет использоваться. Шасси крепиться на системе движения с колесами. Моторный узел (мотор электрический или гидравлический) управляет фитосанитарной системой с помощью электронного блока или компьютера, который получает информацию от датчиков (ультразвуковых, лазерных, энкодерных и других) и видеокамеры. Указанная информация может быть передана удаленному оператору. Система подачи фитосанитарной продукции состоит из устройства, изготовленного из любого типа материала (полиуретан, полиэстер, пластик и т.д.), вентилятора и насоса.
Китайский сельскохозяйственный университет разработал роботизированную систему контроля заболеваний тепличных растений (Патент № CN 108858122, 2018). Робот содержит движущуюся платформу, механическую руку с тремя степенями свободы, камеру сбора изображений заболеваний, навигационную камеру, датчик локального фактора окружающей среды и терминал дистанционного управления. Робот имеет такое преимущество, что ручной осмотр может быть заменен, болезни тепличных растений могут быть автоматически обнаружены, система обеспечивает также предварительное предупреждение о болезнях. Робот разработан в соответствии с фактическими условиями теплицы, он является научным по конструкции и компактным по структуре. Он может адаптироваться к различным условиям ландшафта теплицы, болезни могут быть идентифицированы своевременно и точно.
Компания Deznou Jingchen Machinery Co Ltd (Китай) запатентовала робот для защиты растений (Патент № CN 210746461, 2020). Он снабжен оросительным устройством, которое установлено на подвеске и имеет большой диапазон распыления. Робот удобен для установки в теплицах.
В Китае разработан робот для прополки сорняков в теплицах (Патент № CN 108575128, 2018). Он содержит каркас, на котором размещен линейный модуль, на нижнем конце линейного модуля размещен хвостовик, который содержит втулку и множество механизмов вырывания сорняков. Каждый механизм выкапывания сорняков содержит соединительный стержень, V-образный рабочий стержень и силовой блок, который может выполнять возвратно-поступательные движения в осевом направлении наружной втулки.
Наиболее сложным и важнейшим механическим узлом роботов является шасси. Северо-западный университет Китая предложил полезную модель универсального шасси робота для теплицы (Патент № CN 211333178, 2020). Конструкция содержит корпус шасси и 4 ступичных двигателя, расположенных на нижнем конце корпуса шасси. Монтажные рамы вертикальных валов ступичных двигателей соответственно соединены с соответствующими рулевыми устройствами таким образом, чтобы реализовать поворотное рулевое управление. Датчики обнаружения препятствия расположены на передней, задней, правой и левой частях корпуса шасси, а главный контроллер расположен на корпусе шасси. Полезная модель может реализовать поворот с малым радиусом и даже поворот с нулевым радиусом, может применяться в узких закрытых средах, таких, как теплицы и тому подобное и обладает компактной конструкцией, гибкостью поворота, низким шумом, хорошей проходимостью.
Сельскохозяйственный университет Ганьсу предложил оригинальную механическую конструкцию и дизайн робота для опрыскивания растений в поле и теплицах (Патент № CN 109526923, 2019). По сравнению с существующей техникой повышает безопасность нанесения пестицидов, снижает затраты на разбрызгивание, повышает эффективность обработки, подходит для комплексной борьбы с вредителями и болезнями в теплицах, садах и других растениеводческих объектах.
Основная доля (более 40%) патентов приходится на изобретения и полезные модели роботов, предназначенных для защиты растений, разрабатываются под них специализированные устройства для распыления химических средств. Так, например, китайской машиностроительной фирмой Dezhou Jingchen Machinery разработано специализированное распылительное устройство (Патент № CN 211064776, 2020), предназначенное для оснащения роботов защиты растений. Оно подходит как для малообъемного, так и для крупномасштабного распыления и орошения, имеет большую площадь равномерного покрытия, способно переключать различные функции распыления и орошения, высокоэффективен в работе, надежно в эксплуатации.
Машиностроительная фирма Mianyang Zhaoyu Machinery разработало приводное устройство для сельскохозяйственного робота (Патент № CN 210130081, 2020). Оно включает базовую балку, коробку передач, 4 опорные колесные пары. Опорная колесная пара состоит из основания, опорного колеса, 2 опорных пружин и стержня вала. Устройство пригодно для использования в теплицах и других с.х. объектах с небольшими площадями и узкими пространствами.
1.3 Тенденции в конструировании роботов для теплиц
Разнообразие функций сельскохозяйственных роботов определяет их конструктивные особенности. Те, которые применяются в теплицах можно разделить на две группы. Портальные роботы движутся над рядами растений. Они могут накрывать от одной до нескольких гряд. Примером может служить устройствоThorvald (рис. 1.1), предназначенное для борьбы с болезнями сельскохозяйственных культур. Достигается это ультрафиолетовым облучением в тёмное время суток. Недостатком портальной конструкции является невозможность работы с высокорослыми культурами (томаты, огурец).

Рисунок1.1 − Робот Thorvald, SAGA Robotics, Норвегия. Предназначен для ультрафиолетовой обработки растений. Источник изображения: sagarobotics.com.
Конструкция другой группы роботов рассчитана на движение между рядами (грядами) (рис. 1.2 и рис. 1.3). Такое техническое решение позволяет взаимодействовать с растениями любой высоты. В теплицах часто используют труборельсы, которые задают траекторию перемещения (рис. 1.2). Фирма SAGA Robotics создала целый ряд роботизированных устройств на разных платформах. Наиболее востребованным их применением является борьба с болезнями растений посредством ультрафиолетовой обработки.
По типу организации движения роботы для сбора плодов, в большинстве своём относятся к этой же конструктивной группе. Они перемещаются между рядов (рис. 1.3) оснащены системой технического зрения (рис. 1.4) и манипуляторами с большим числом степеней свободы (рис. 1.5).
В России также началась разработка роботизированных платформ (систем) для защищённого грунта. В Кабардино-Балкарском научном центре РАН разработан робототехнический комплекс для сбора урожая. Он способен находить зрелые плоды, отделять их от ветвей и перемещать за пределы теплицы (рис. 1.6). Одним из ведущих отечественных предприятий по производству роботов, в том числе и сельскохозяйственных, является компания ООО «Би Ай Ди Технолоджис Рус».Её продукция не уступает зарубежной и обладает высокой точностью (рис. 1.7).

Рисунок1.2 −Робот Thorvald, SAGA Robotics, Норвегия. Другое конструкторское решение. Предназначен для ультрафиолетовой обработки растений. Источник изображения: sagarobotics.com.

Рисунок1.3 − Робот GRoW (Greenhous Robotic Worker), компания METOMOTION, Израиль предназначен сбор и расфасовка зрелых томатов в теплице. Может также проводить опыление цветков, удалять пасынки, контролировать состояние растений. Источник информации: https://metomotion.com

Рисунок1.4 −Система технического зрения для распознавания образа и координат плодов (сладкий перец, виноград, яблоки). Разработчики робота: Wageningen UR (университет и научно-исследовательский центр) и Agritronics, Sint Annaparochie, Нидерланды. Назначение робота – сбор урожая, навесное и точечное опрыскивание.
Источник информации — сайт:wageningenur.nl и agritronics.nl

Рисунок1.5 −Сбор томатов с помощью манипулятора. Разработчик робота Root AI, США (стартап в Массачусетсе). Информация с сайта http://robotrends.ru/robopedia/katalog-avtonomnyh-robotov-dlya-raboty-v-selskom-hozyaystve
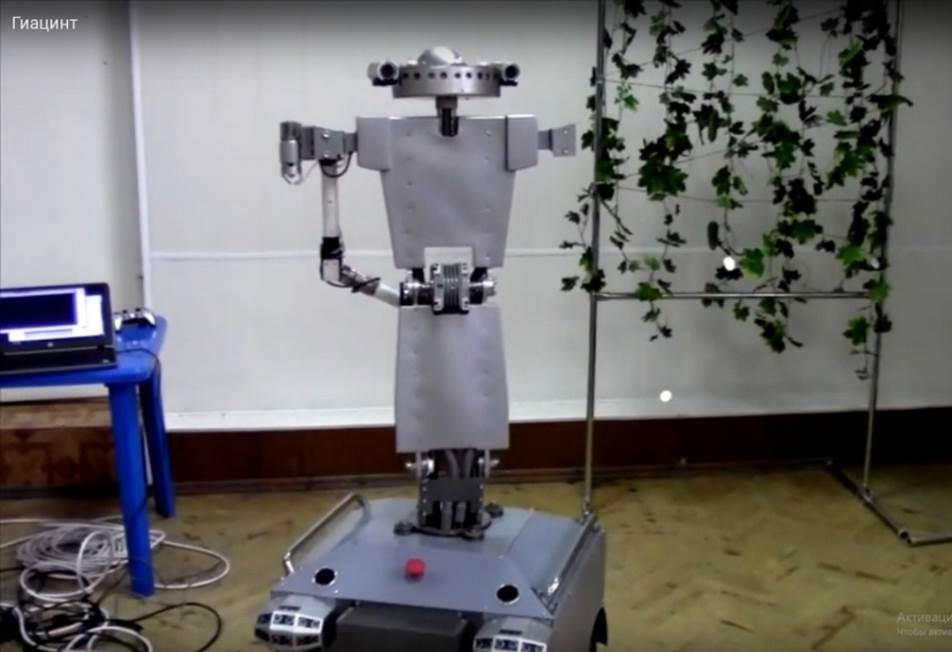
Рисунок1.6 − Робототехнический комплекс, созданный в Кабардино-Балкарском научном центре РАН. Предназначен для сбора и транспортировки плодов в защищённом грунте.
Информация с сайта http://www.kbncran.ru/7339-2/

Рисунок1.7 −Манипулятор робота для сбора плодов. Компания ООО «Би Ай Ди Технолоджис Рус» (BID Technologies), Ярославль, Россия. Источник информации https://bid.life/lp/agricultural-robots.html
В настоящее время в мировом тепличном хозяйстве ощущается острая нехватка кадров. Пандемия из-за сокращения миграции наёмных работников сделала этот вопрос особенно острым. Всё меньше становиться спрос на низкоквалифицированный, тяжёлый, а часто и вредный труд в теплицах (рис. 1.8).

Рисунок1.8 − Ручное опрыскивание тепличных растений пестицидами.
Роботизация технологических процессов может стать эффективным способом решения проблемы. Наиболее актуальными являются машинный сбор плодов, а также защита растений от болезней. Именно эти технологические операции являются наиболее трудоемкими и опасными для здоровья человека. Научные, патентные и технические источники информации не показали эффективных и экологически чистых методов подавления патогенной микробиоты в теплицах. Известные роботизированные системы используют опрыскивание растений пестицидами (рис. 1.4, рис. 1.8) или их обработку ультрафиолетовым излучением (рис.1.1и рис. 1.2). В первом случае используются высокотоксичные химические вещества, во втором излучение, которое подавляет не только развитие грибов и бактерий, но и самих культивируемых растений. Кроме этого оно может вызывать мутации, как в растительных, так и микробных клетках. В связи с этим создание роботизированной платформы интегрированной защиты овощных растений защищённого грунта от болезней явилась предметом исследований в рамках Госзадания МС РФ. Такие устройства не были обнаружены в проанализированных источниках информации. Тем не менее, удалось выявить ряд частных технических решений, представляющих интерес с позиций решаемой задачи, что нашло отражение в технических требованиях на экспериментальный образец роботизированной платформы.
2. Технические требования на экспериментальный образец роботизированной платформы интегрированной защиты овощных растений защищённого грунта от болезней
Назначение и область применения
Экспериментальный образец роботизированной платформы интегрированной защиты овощных растений защищенного грунта от болезней – далее «Устройство», предназначен для автоматического облучения растительных организмов когерентным светом с целью повышения их функциональной активности; листовой обработки защитными биопрепаратами для экологической защиты от болезней, а также для сбора информации о параметрах окружающей среды. Может быть использовано для проведения экспериментов по оптимизации технологических режимов облучения и опрыскивания растений в условиях защищенного грунта.
«Устройство» эксплуатируется в условиях лабораторных и производственных помещений.
Основание для разработки
Стратегия машинно-технологической модернизации сельского хозяйства России на период до 2020 г.
Государственное задание на 2020 год от Министерства сельского хозяйства РФ «Разработка роботизированной платформы и технологических приемов её применения для интегрированной защиты овощных растений защищённого грунта от болезней в рамках органического земледелия», срок выполнения 01.01.2020 – 30.12.2020 .
Цель и назначение разработки
Цель разработки – автоматизация процессов обработки лазером, защитными биопрепаратами и сбора информации о состоянии окружающей среды в процессе выращивания овощных растений в теплицах и повышение рентабельности производства овощей.
«Устройство» должно выполнять следующие операции:
— автоматизированное перемещение по рельсотрубам в заданное время и выполнение программ облучения и обработки растений без участия человека;
— лазерное облучение овощных растений;
— опрыскивание растений биопрепаратами;
— сбор, передачу и сохранение информации о следующих параметрах окружающей среды: температура, влажность, освещенность, содержание углекислого газа;
— регулирование времени обработок;
— регулирование интенсивности облучающего потока;
— регулирование высоты размещения лазерных модулей;
— переход в режим ожидания по окончании цикла облучения;
— дублирование всех автоматических команд ручным управлением.
Источники разработки
Анализ информации ведущих стран мира в области лазерного и оптического облучения растений.
Материалы исследований НИПЛ «Биофотоника» ФГБОУ ВО «Мичуринский государственный аграрный университет».
Обобщенные результаты испытаний макетных и экспериментальных устройств лазерного облучения растений в лабораторных и производственных условиях.
Технические требования к устройству
Состав продукции и требования к конструкции.
«Устройство» должно включать следующие узлы:
— блок с лазерными излучателями, формирующими пучки по обе стороны от труборельс – слева и справа по ходу движения;
— водонепроницаемые блоки для размещения устройств питания, датчиков, электромеханических, оптических и электронных узлов;
— электромеханическую платформу с колесными парами, устанавливаемую на труборельсы;
— съемную емкость с рабочим раствором защитных биопрепаратов объемом не менее 5 литров с оросительной штангой, собственным автономным блоком питания (аккумулятором) и системой крепежа на электромеханической платформе;
— встроенный (бортовой) компьютер с программой автоматизированного управления «Устройством» и сбора информации и с возможностью дистанционной связи с внешними управляющими устройствами;
— ардуино-ориентированные датчики температуры, влажности, освещенности и содержания углекислого газа с выводом информации на бортовой компьютер и на встроенный индикатор с периодичностью не менее 1 цикла в минуту;
— коллекторный двигатель с кинематикой для привода колес;
— датчик пройденного расстояния (числа оборотов колесной пары) с выводом информации в бортовой компьютер;
— аккумуляторное питание и разъемы для подключения внешнего питания для заряда батарей и питания схем;
— солнечную батарею и контроллер заряда аккумуляторов;
— встроенную цветную видеокамеру с передачей информации на бортовой компьютер;
— электромеханическую систему подъема блока с лазерными модулями для регулирования высоты зоны лазерного облучения.
Управление «Устройством» должно производиться оператором без специальных требований к профессиональным навыкам.
Регулирование и настройка рабочих органов устройства осуществляется перед началом работы с учетом условий эксплуатации, вида объекта и задач.
«Устройство» питается от аккумуляторов напряжением 12 В.
Электронные блоки «Устройства» должны иметь защиту от перегрузки и короткого замыкания, а оптико-механические блоки – от попадания посторонних предметов, пыли и влаги.
Конструкцией «Устройства» должен быть предусмотрен визуальный или телеметрический контроль за процессом работы.
«Устройство» по устойчивости к механическим воздействиям должно иметь обыкновенное исполнение согласно ГОСТ 12997-76.
«Устройство» по устойчивости к воздействию окружающей среды должно иметь исполнение согласно ГОСТ 12997-76.
— полупроводниковые лазеры красной области спектра полупроводниковые излучатели мощностью от 5 до 100 мВт – не менее 20 единиц, формирующие суммарную мощность излучения не менее 500 мВт;
— коллекторный двигатель с редуктором мощностью не менее 10 Вт, напряжением питания 3-12 В, и регулируемой скоростью вращения по питанию от 3 до 300 оборотов в минуту.
— портативный опрыскиватель производительностью не менее 1,5 литров в минуту;
— бортовой компьютер с напряжением питания 12 В; оперативной системой W’10, встроенным Wi-Fi, оперативной памятью не менее 2 Гб, встроенной памятью не менее 120 Гб.
Скорость движения электромеханической платформы по труборельсам в режиме лазерного облучения — 0,2-0,3 метра в минуту; в режиме опрыскивания – 0,5-0,6 метров в минуту, в режиме съема информации – не менее 1 метра в минуту.
Коэффициент использования эксплуатационного времени — не менее 0,7.
Коэффициент надежности выполнения технологического процесса — 0,95.
Масса — не более 100 кг.
Кол-во обслуживающего персонала – 1 чел., в том числе занятых на основном производстве – 1 чел.
Показатели качества работы:
— точность выдержки заданной скорости движения — не мене 5 %;
— допустимое повреждение растений — не более 0,01 %.
Стабильность интенсивности зондирующего излучения – не менее 10 % в течение 10 часов непрерывной работы.
— относительная влажность воздуха – не более 95 %;
— температура воздуха – не более 35 оС и не менее 10оС.
— запыленность – не более 2 мг/м3.
Периодичность работы – ежедневная в течение года.
Характеристика объектов облучения:
— овощные тепличные растения высотой до 2,5 метров
Конструкция «Устройства» должна обеспечить свободный доступ ко всем узлам и деталям для их очистки, регулировки, замены или ремонта.
Должна быть предусмотрена возможность аварийного отключения процесса облучения в случае нештатных ситуаций.
Средняя оперативная трудоемкость основной сборки «Устройства» — не более 6 чел. -ч.
Средняя оперативная трудоемкость досборки «Устройства» при переносе на новое место работы — не более 3 чел. -ч.
Средняя оперативная продолжительность перевода «Устройства» из рабочего в транспортное положение работы — не более 2 чел. -ч.
Суммарная оперативная трудоемкость при постановке на хранение, снятия и хранения «Устройства» – не более 4 чел.-ч.
овощных растений:
— плотность мощности – 0,1…10 Вт/м2
— длина волны – 630…660 нм.
— длина когерентности – не менее 30 мкм
— радиус корреляции – не менее 30 мкм
— экспозиция – 0,3 — 16 с.
Требования безопасности
Конструкция «Устройства» должна отвечать требованиям ГОСТОВ и международных стандартов, предъявляемых к оборудовании, содержащем лазерные источники оптического излучения: ГОСТ Р50723-94 «Лазерная безопасность. Общие требования безопасности при разработке и эксплуатации лазерных изделий»; ГОСТ РМЭК 60950-2002 «Безопасность оборудования информационных технологий», IEC 65085-1:2001 «Safety of laserproducts. Part 1: Equipmen tclassification. Requirement sanduser’sguide».
Эстетические и эргономические требования
Устройство должно соответствовать эстетическим и эргономическим требованиям по всем показателям.
Требования к маркировке и упаковке
На видном месте «Устройства» крепятся таблички со знаками лазерной опасности, кратким наименованием и годом выпуска.
Запасные части, инструмент и руководство по эксплуатации должны быть упакованы в отдельную коробку (пакет или ящик).
Требования к транспортировке и хранению
Транспортирование «Устройства» допускается любым видом транспорта, обеспечивающим сохранность качества и товарного вида.
«Устройство» может храниться в комнатных условиях при температуре от +2оС до + 50 оС и влажности от 10 до 90 %.
Требование к категории качества
«Устройство» должно соответствовать по своим показателям лучшим отечественным достижениям науки и техники.
Требования внешнего рынка
При разработке устройства и установлении его технико-экономических показателей должны быть учтены общие требования, удовлетворяющие запросам вероятных потребителей зарубежных стран.
Экономические требования
Годовой экономический эффект – не менее 20 тыс. рублей.
Степень снижения прямых издержек — не менее 15 %
Лимитная цена в ценах 2020 г. – 250 тыс. рублей.
Годовая загрузка – 1000 ч. Гарантийный срок службы – 3
3. Разработка экспериментального образца роботизированной платформы интегрированной защиты овощных растений защищённого грунта от болезней
Экспериментальный образец роботизированной платформы интегрированной защиты овощных растений защищенного грунта от болезней предназначен для технического обеспечения экспериментальных исследований по автоматизации и роботизации процесса интегрированной защиты овощных растений защищенного грунта на базе облучения растительных организмов когерентным светом с целью повышения их функциональной активности; обработки защитными биопрепаратами, а также сбора информации о параметрах окружающей среды и последующей корректировки режимов и времени обработок. Может также быть использован для промышленной обработки растений в тепличных комплексах.
Цель разработки – автоматизация процессов обработки лазером, защитными биопрепаратами и сбора информации о состоянии окружающей среды в процессе выращивания овощных растений в теплицах и повышение рентабельности производства овощей.
На базе энерго- и ресурсосберегающих технологий агрофотоники разработать роботизированную платформу с интеллектуальной системой прецизионного перемещения, облучения, мониторинга микроклиматических параметров и обработки защитными биопрепаратами. Использование роботизированной платформы, обеспечит экологически безопасную защиту растений от болезней, повышение рентабельности овощеводства защищённого грунта, повышение физиологической активности культивируемых растений, осуществление технологических процессов без участия операторов, цифровизацию технологий агрофотоники.
Предваряющий разработку патентный поиск выявил, что существуют устройства для лазерного облучения семян и растений, включающие лазер, блок питания и узлы двухкоординатного сканирования лазерного пучка по горизонтальной и вертикальной координатам на базе вращающихся или качающихся зеркал (А.С. СССР № 957452; А.С. СССР № 1649498; Патент РФ № 2328847; Патент РФ № 2321032; Патент РФ № 2202869; Полезная модель РФ № 75530). Основным недостатком такого рода устройств является высокий разброс режимов облучения при сканировании даже небольшого пространства с растениями, при этом объекты получают неизвестные дозы лазерного облучения со случайной периодичностью и кратностью. Помимо этого, данные устройства невозможно приспособить для облучения растений защищенного грунта, так как в теплице множество технических и технологических конструктивных элементов, экранирующих лазерный луч, при этом излучение не достигает до листьев среднего и нижнего яруса тепличных растений, наиболее нуждающихся в дополнительном световом облучении.
Модернизация технической базы лазерного облучения позволила на базе НИПЛ «Биофотоника» ФГБОУ ВО «Мичуринский государственный аграрный университет» создать экспериментальный образец самоходной установки для прецизионной лазерной обработки вегетирующих овощных растений в условиях теплиц защищенного грунта (Патент РФ № 168240, 2016; Будаговская, 2019). Ее применение позволило на 22-25 % увеличить урожайность томатов и снизить поражение болезнями. Была установлена высокая эффективность подобного рода техники, которая может быть использована для интегрированной защиты тепличных овощных растений на базе облучения когерентным светом и обработки защитными биопрепаратами, активированными лазером. Так как наиболее оптимальное время проведения вышеуказанных защитных процедур – с 19 часов вечера до 6 утра, то процесс должен проходить без участия человека, при этом время обработок, ее длительность, количество циклов, доза внесения препарата и интенсивность действующего на растения когерентного света должны корректироваться с учетом микроклимата теплицы, а в идеале – индивидуально для каждого растения с учетом его физиологического состояния и конкретных условий, в которых оно растет. В качестве таких параметров микроклимата были выбраны следующие показатели – температура, влажность, освещенность, содержание углекислого газа. Наиболее очевидное техническое решение для подобного рода задач – использование базового бортового компьютера и микропроцессорных систем сбора и управления информацией.
3.1. Разработка функциональной схемы микропроцессорного управления роботизированной платформой
В результате длительной узкоцелевой селекции возделывание культурных растений стало невозможным без применения защитных препаратов. Современные химические фунгициды эффективно подавляют развитие патогенной микробиоты, но при этом сами являются источником опасности. Имея значительный период полураспада, они накапливаются в почве, воде и продуктах питания, оказывая негативное влияние на здоровье человека. Наряду с этим длительное применение фунгицидов вызывает генетическую изменчивость микроорганизмов, приводя к появлению более устойчивых и вирулентных рас патогенов. Предпринятая в рамках органического земледелия попытка отказаться от химических препаратов сопровождается не только снижением количества и качества продукции, но и появлением в ней не менее токсичных соединений органического происхождения, например, афлатоксинов.
Для решения проблемы необходимо создание экологически безопасных способов защиты растений от болезней. Один из них основан на применении фоторегуляторного действия низкоинтенсивного когерентного, в частности лазерного излучения. Кратковременное воздействие такого экологически безопасного фактора приводит к повышению функциональной активности различных организмов (фотостимуляционный эффект). Происходит это на эпигенетическом уровне, за счёт боле полного использования генетического потенциала клетки. У растений фотостимуляционный эффект может проявляться в усилении защитных, в том числе и иммунных реакций. После лазерной обработки семена, плоды или вегетирующие растения меньше подвержены заболеваниям и лучше развиваются (Будаговский, 2008).
Другим экологически безопасным способом борьбы с болезнями растений являются защитные биопрепараты (ЗБП), сдерживающие развитие патогенной микробиоты. В настоящее время в нашей стране производят около 30 различных ЗБП для растениеводства. Однако их эффективность не всегда бывает достаточно высокой. Такие препараты имеют ограниченный срок действия, инактивируются повышенной температурой и интенсивным светом, весьма чувствительны к условиям хранения и применения, имеют низкую воспроизводимость действия, зависящую от ценотического окружения. Проведенные исследования показали, что для повышения защитных свойств биопрепаратов может быть использовано фоторегуляторное действие когерентного света (Патент РФ №2683684, 2019).
Экологически безопасные методы защиты растений от болезней особенно актуальны при производстве овощей в защищённом грунте, где применение химических фунгицидов ограничено. С этой целью в лаборатории биофотоники ФГБОУ ВО «Мичуринский государственный аграрный университет» разрабатывается роботизированная платформа для обработки тепличных растений лазерным излучением и микробными препаратами. Данное устройство полностью автономно и выполняет технологические операции без участия оператора. Основными элементами конструкции являются: блок управления технологическими процессами, блок горизонтального и вертикального перемещения, блок лазерной обработки растений, блок обработки растений биопрепаратами, блок регистрации параметров окружающей среды и блок автономного электроснабжения и контроля функционирования.
Управляет платформой специально разработанная программа, загруженная в бортовой компьютер. Она собирает и анализирует информацию об окружающей среде и координирует работу микроконтроллеров, расположенных в других блоках. Наряду с этим по сети Wi-Fi может проходить ручное управление и корректировка параметров программы.
Блок управления подаёт команды на блок горизонтального и вертикального перемещения. В соответствие с заданным алгоритмом, происходит включение электропривода горизонтального перемещения, что приводит в движение роботизированную платформу по труборельсам. Скорость движения 0,3; 0,6 или 0,9 м/мин определяется условиями выполнения определённой технологической операции. Для предотвращения аварийных ситуаций на блоке установлены датчики препятствий, останавливающие или изменяющие направление перемещения платформы. По окончании одного цикла движения (вперёд и назад) платформа возвращается в исходное положение и остаётся там до поступления новой команды.
Блок регистрации параметров
окружающей среды
Блок управления технологическими процессами
Блок
обработки растений биопрепаратами
Блок горизонтального и вертикального перемещения
Блок
лазерной обработки
растений
Блок автономного электроснабжения и контроля функционирования
Функциональная схема микропроцессорного управления роботизированной платформой
Растения в процессе вегетации постоянно увеличивают свою высоту. Для сохранения оптимальной зоны облучения верхняя часть конструкции, включающая солнечную батарею, датчики параметров окружающей среды и лазерные излучатели, автоматически поднимается приблизительно с такой же скоростью: 2-3 см/сутки.
Обработка растений когерентным излучением происходит во время движения платформы с минимальной скоростью 0,3 м/мин. Двадцать четыре лазера формируют на рядах растений пространственную решетку световых лучей низкой интенсивности. Предварительно проведенные исследования показали, что такое воздействие оказывается достаточным для перевода фитохрома (одного из основных хромопротеидов клеток) в активное конформационное состояние. В результате не только повышается устойчивость растений к болезням, но и увеличивается фотосинтетическая активность листьев, что особенно важно в теплицах без искусственного освещения. Лазерная досветка происходит не менее одного раза в сутки. Компьютерная программа с помощью блока регистрации параметров окружающей среды анализирует освещённость и при её низком уровне даёт команду на повторные циклы движения.
Обработка биопрепаратами также происходит во время движения платформы, но с большей скоростью: 0,6 или 0,9 м/мин. Рабочий раствор подаётся встроенным компрессором в форсунку и распыляется мелкодисперсным облаком. Количество таких обработок определяется инфекционным фоном в теплице.
В процессе движения платформы информация о температуре, влажности, освещённости и концентрации углекислого газа поступает из блока регистрации параметров в бортовой компьютер, где и запоминается. Эти же сведения по сети Wi-Fi могут передаваться на удалённый компьютер оператора теплицы. Такой подход позволяет оценивать изменение состояния окружающей среды в различных зонах теплицы и оптимизировать условия культивирования.
Для автономного электроснабжения используется литиевый аккумулятор большой ёмкости. В дневное время он через согласующее устройство подзаряжается от солнечной батареи, установленной в верхней части конструкции посредством закрепления к крышке верхнего блока. В качестве согласующего устройства использован контроллер заряда аккумулятора от солнечной батареи.
3.2. Разработка и испытание основных узлов роботизированной платформы
Для полноценного выполнения операций обработки растений когерентным излучением и защитными биопрепаратами в автономном режиме, роботизированная платформа должна включать следующие основные узлы:
1 — электромеханическую платформу с колесными парами, устанавливаемую на труборельсы;
2 — коллекторный двигатель с кинематикой для привода колес;
3 — датчик пройденного расстояния (числа оборотов колесной пары) с выводом информации в бортовой компьютер;
4 — датчики препятствий по ходу движения платформы;
5 — электронную схему управления горизонтальным движением платформы с реверсом в конце ряда и возвращением в исходную позицию;
6 — электромеханическую систему подъема (штанга) блока с лазерными модулями для регулирования высоты зоны лазерного облучения;
7 — электронную схему управления подъемом (опусканием) штанги;
8 — блок с лазерными излучателями, формирующими пучки по обе стороны от труборельсов – слева и справа по ходу движения;
9 — съемную емкость с рабочим раствором защитных биопрепаратов объемом не менее 5 литров и оросительной штангой, собственным автономным блоком питания (аккумулятором);
10 — встроенный (бортовой) компьютер с программой автоматизированного управления платформой, сбора и обработки информации с датчиков и с возможностью дистанционной связи с внешними управляющими устройствами;
11 — ардуино-ориентированные датчики температуры, влажности, освещенности и содержания углекислого газа с выводом информации на бортовой компьютер и на встроенный индикатор с частотой не менее 1 цикла в минуту;
12 — аккумуляторное питание и разъемы для подключения внешнего питания для заряда батарей и питания схем;
13 — солнечную батарею и контроллер заряда аккумуляторов;
14 — встроенную цветную видеокамеру;
15 — компьютерную программу сбора данных и управления платформой.
Первые 5 узлов составляют электромеханический блок горизонтального перемещения роботизированной платформы. Он должен обеспечивать выполнение следующих операций:
— прецизионное перемещение вдоль ряда с тепличными растениями по трубам подачи питательного раствора и возвращение назад без участия человека, в автоматическом режиме;
— автоматическое (по команде компьютерной программы) и ручное (по команде оператора) включение (активация);
— автоматический переход в режим ожидания по завершению цикла сканирования после однократного проезда по рельсотрубам вперед и назад;
— перемещение с не менее чем 2-мя различными скоростями; одна из скоростей оптимизирована под лазерное облучение, вторая – под обработку защитными биопрепаратами;
— контроль местоположения платформы;
— автоматическая остановка движения при наличии препятствия.
Кроме того, корпус, в котором будет установлен электромеханический блок горизонтального перемещения должен иметь достаточные габариты для размещения на нем систем опрыскивания, лазерных модулей, датчиков местоположения и препятствий, микропроцессорных узлов и бортового компьютера, солнечной батареи, аккумуляторов и контроллеров, панели управления, электромеханического штока вертикального перемещения лазерных излучателей. В связи с этим был использован корпус размером 320х170х25 мм, в котором предусматривается размещение следующих элементов роботизированной платформы: опорные колеса для перемещения платформы по полу; пара ведущих и пара ведомых колес для обеспечения движения платформы по рельсотрубам; 2 вала с подшипниками, на котором крепятся колеса; низкооборотный реверсивный двигатель с приводом на пару ведущих колес и с приводом на счетчик оборотов; счетчик оборотов; герконовый датчик «стоп»; герконовый датчик «реверс»; аккумулятор №1; контроллер солнечной батареи; схема управления горизонтальным движением платформы; микропроцессорные блоки управления электромеханическими узлами платформы; разъемы для кабелей связи электронных блоков платформы; предохранители и переключатели, входящие в состав панели управления платформой.
3.2.1. Описание конструкции электромеханического блока
горизонтального перемещения и входящих в его состав элементов
Базовый корпус блока размером 320х225х170 мм, выполнен из металла со съемной верхней панелью размером 320х225х2 мм (рис.3.1).
В трех точках верхней части корпуса расположены узлы крепления несущей фермы для электромеханического штока вертикального перемещения, блока лазерных модулей (рис.3.1, позиция 1). В двух точках верхней части корпуса (спереди и сзади (рис.3.1, поз.2) крепятся датчики препятствия (рис.3.1, поз.3).
Левая и правая короткие боковые стенки корпуса предназначены для крепления ручки переноски платформы (рис.3.2, поз.1 и рис.3.3, поз.1) и коммутационных элементов панели управления роботизированной платформы (рис.3.2 и рис.3.3).

1
2
3
1
Рисунок 3.1 – Внешний вид электромеханического блока горизонтального перемещения. 1 – места крепления несущей фермы; 2 – места крепления датчиков препятствий; 3 – датчики препятствия.
Ориентиром для определения местоположения правой и левой стенки являются крепление несущей фермы для верхних блоков и узлов. В верхней части правой боковой панели находится один крепежный элемент для фермы, а в верхней части левой боковой панели – два крепежных элемента.
На правой короткой боковой стенке установлены: разъем ХР1, предназначенный для подключения кабеля к опрыскивателю; разъем ХР2, предназначенный для подключения кабеля связи с верхними блоками; переключатель П1, предназначенный для отключения внутреннего аккумулятора от нагрузки; два предохранителя: Пр1 и Пр2. Пр1 стоит в цепи нагрузки, а Пр2- на шине зарядки аккумулятора через контроллер. Из отверстия с резиновой заглушкой выходит шланг с USB – разъемом для подключения кабеля связи с бортовым компьютером (рис. 3.2, поз.7).
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |

Рисунок 3.2 – Правая короткая боковая панель корпуса электромеханического блока горизонтального перемещения платформы: 1 – ручка для переноски платформы; 2 – предохранитель Пр1; 3 — разъем ХР1; 4 — переключатель П1 (повернут влево — включено, вправо — отключено); 5 –разъем ХР2; 6 – предохранитель Пр2; 7 – USB-разъем ХР-1 для кабеля связи с бортовым компьютером.
На левой короткой боковой стенке установлены: ручка для переноски платформы, разъем ХР3, предназначенный для подключения кабеля вертикального подъемника, разъем ХР4, предназначенный для подключения кабеля внешнего сетевого питания или аккумулятора, а также переключатель П2 для включения/отключения ультразвуковых датчиков препятствий (сонаров) (рис.3.3). На платформе предусмотрены 2 сонара — во фронтальной и кормовой части платформы, переключателем П2 включаются-отключаются сразу оба сонара.
На боковых длинных бортах корпуса вмонтированы два герконовых датчика 6 и 8 местоположения роботизированной платформы 4 на тепличных рельсотрубах 2 (рис.3.4). Датчик 8 «СТОП» расположен на правой боковой стенке корпуса, датчик 6 «РЕВЕРС» — на левой боковой стенке корпуса. Датчики крепятся ниже оси ведомых колес 5, внутри корпуса проходят провода, передающие сигналы от датчиков к схеме управления движением платформы. Датчики срабатывают от магнитов и для надежной работы в реальных условиях необходимо обеспечить уверенное замыкание герконовой контактной пары датчиков на расстоянии не менее 8-14 мм от магнита. Магнит 9 «стоп» располагают в начале ряда (в стартовой позиции платформы), на правой от платформы трубе на уровне правого датчика 8 «стоп». Магнит 1 «реверс» располагается в конце ряда на левой от РСТ трубе подачи питательного раствора в том месте, где роботизированная платформа должна остановить движение «вперед» и начать обратное движение (рис.3.4).
| 1 | 2 | 3 | 4 |

Рисунок 3.3 – Передняя панель корпуса электромеханического блока горизонтального перемещения платформы: 1 – ручка для переноски платформы; 2 – разъем ХР3 для кабеля вертикального подъемника; 3 — переключатель П2 для включения/отключения сонаров (положение переключателя вверх– включены датчики препятствия, вниз — отключены); разъем ХР4 для кабеля внешнего сетевого питания или внешнего аккумулятора.
Внутренний аккумулятор (аккумулятор №1).Выходное напряжение аккумулятора 12 В, емкость 10 АЧ/120Вт*ч. Максимальный долговременный выходной ток – 15А. Габаритные размеры – 150х65х92 мм, масса батареи – 1270 грамм. Напряжение заряда -14,6 В, ток заряда – 3А. Рабочий температурный режим разряда от -20 до + 60 градусов по Цельсию. Размещен внутри корпуса (рис. 3. 5, поз. 1), предназначен для питания электронных схем платформы в момент зарядки или смены базового внешнего аккумулятора.
5 64785
343
12
Рисунок 3.4 – Схематическое изображение расположения герконовых датчиков местоположения роботизированной платформы на рельсотрубах. 1 – магнит «РЕВЕРС», 2 — рельсотрубы, 3 – ведомые колеса, 4 – корпус электромеханического блока электромеханического блока горизонтального перемещения платформы, 5 – ведущие колеса, 6 – герконовый датчик «РЕВЕРС», 7 — герконовый датчик «СТОП», 8 – магнит «СТОП».
Подключен в общую входную цепь к контроллеру заряда аккумуляторов (рис. 3.6, поз.3) через диод D1 (рис.3.6, поз.1). Аккумулятор из серии LiFePO4 с внутренней защитой от перезарада, защитой по среднему току на выходе и перегреву.
1 2 3 4 5 6 7
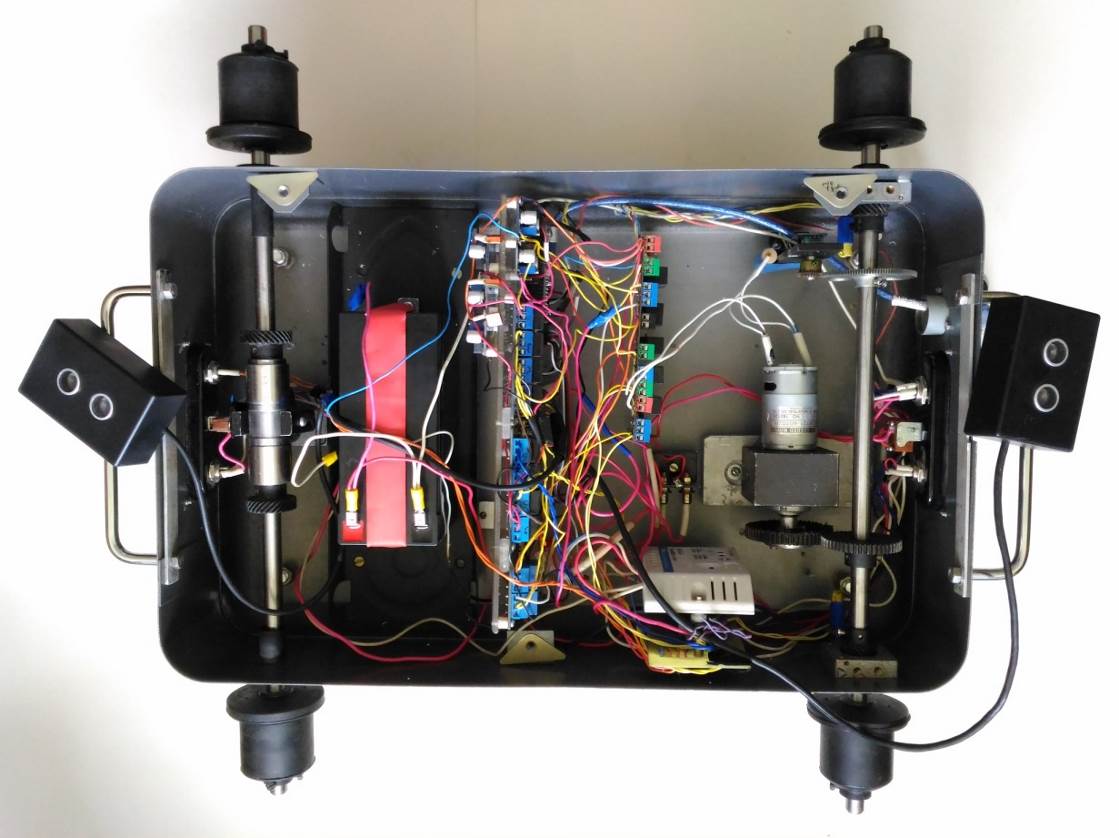
Рисунок3.5 – Общий вид конструкции электромеханического блока горизонтального перемещенияроботизированной платформы: узлы и элементы, находящиеся внутри корпуса: 1 – аккумулятор №1; 2 — электронные схемы управления движением РСТ; 3 – контроллер солнечной батареи; 4 – механическая передача с коллекторным двигателем, 5 – датчик оборотов ведущей оси; 6 – ведущая ось платформы.
Механическая передача вращения двигателя на ведущую ось электромеханического блока горизонтального перемещения платформы (рис.3.7). Ось диаметром 12 мм , на ней зубчатая передача вращения от коллекторного двигателя 50 мм и 60 мм. Ось проходит внутри нижнего блока и закреплена на нем с помощью двух подшипников. Ведущие колеса размещены на концах оси, выходящих за габариты нижнего блока (рис.3.5 и рис.3.8).
1 2 3
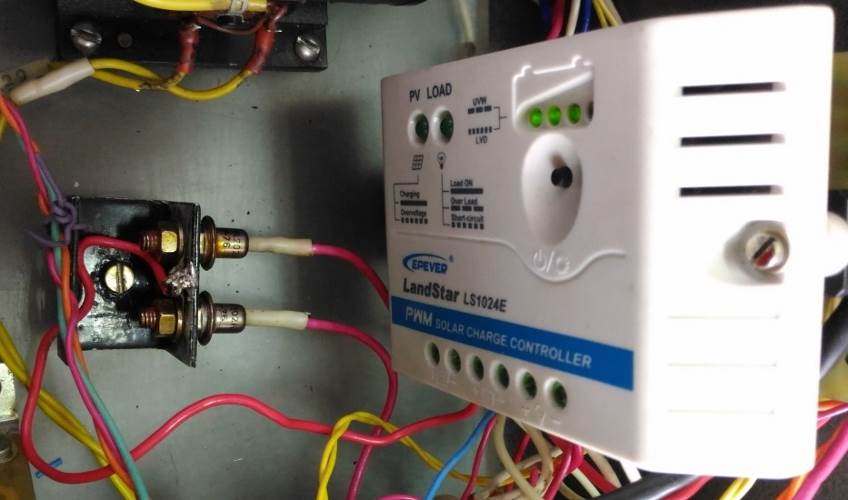
Рисунок 3.6 – Соединение аккумулятора №1 к контроллеру заряда. 1- диод D1 в цепи внутреннего аккумулятора; 2 — диод D2 в цепи внешнего питания (солнечная батарея или сетевое питание от преобразователя 220/14 В), предназначенного для заряда аккумуляторной батареи или резервного питания.
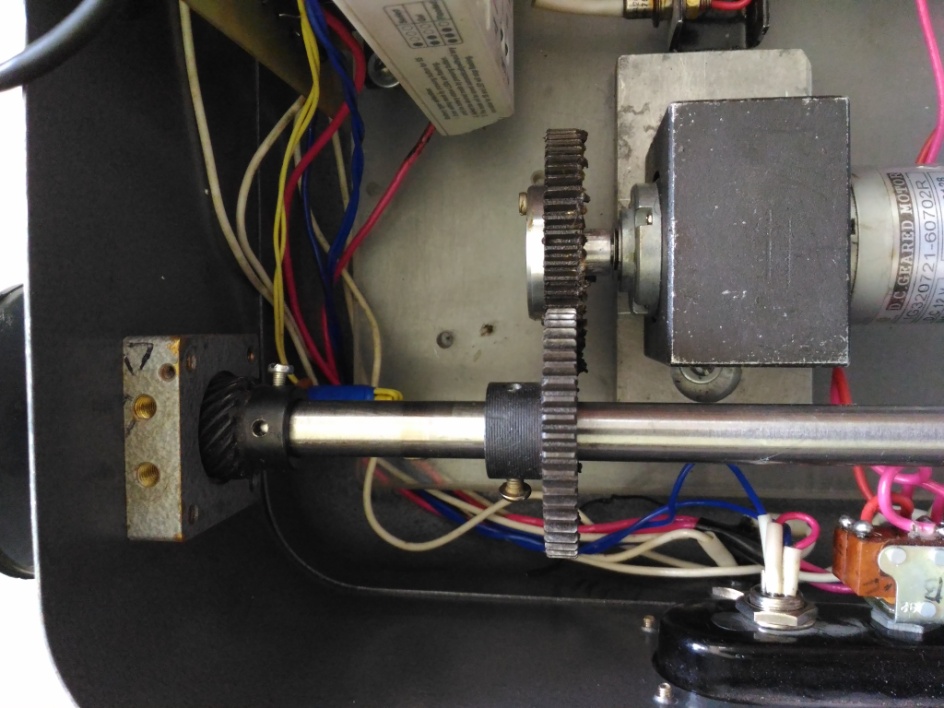
Рисунок 3.7– Конструкция механической передачи вращения
двигателя на ведущую ось

Рисунок 3.8 – Конструкция крепления оси с ведущими колесами к корпусу
нижнего блока роботизированной платформы
4. Датчик числа оборотов ведущих колес (рис.3.9).Предназначен для определения местоположения платформы в процессе движения. Информация с датчика поступает на микропроцессорный модуль и далее – в бортовой компьютер.
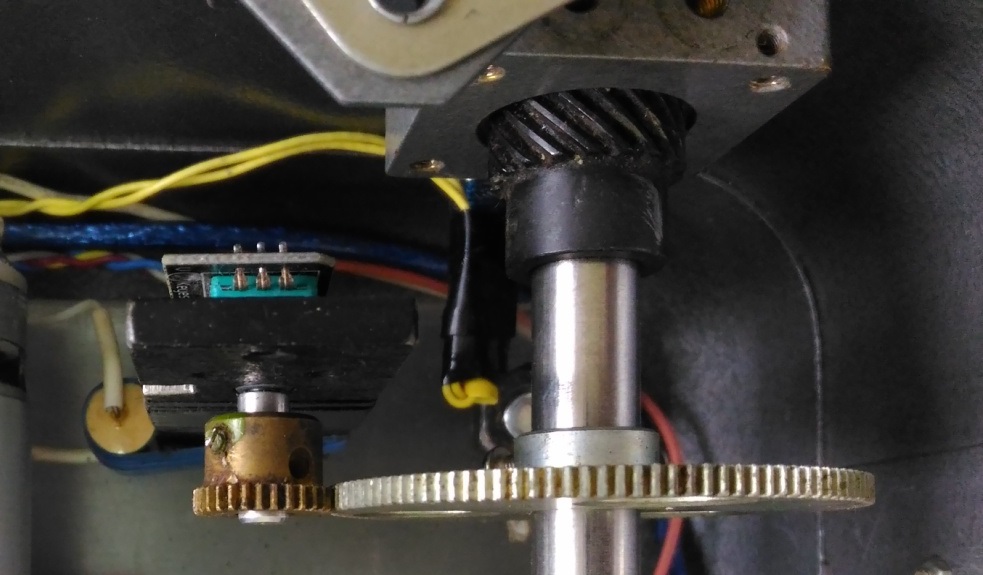
Рисунок 3.9 – Датчик числа оборотов ведущих колес с системой
механической передачи вращения с ведущей оси на энкодер.
Соотношение размера и числа зубьев шестерен, используемых для передачи механического вращения с ведущего вала на датчик числа оборотов произвольное (в изготовленном варианте платформы диаметры шестеренок составляют 60 и 15 мм соответственно). После сборки платформы опытным путем определяется, сколько оборотов, регистрируемое датчиком соответствует одному метру перемещения по рельсотрубам и это число заносится в компьютерную программу определения местоположения платформы.
5.Контроллер заряда аккумуляторов (рис.3.10) .Предназначен для контроля заряда внутреннего аккумулятора от солнечной батареи и внешнего напряжения, подаваемого через адаптер постоянного тока от сети 220 В. Используется контроллер марки Epsolar LS1024Е, рассчитанный на максимальное входное напряжения 50 В и номинальный ток заряда/разряда 10 А. Контроллер обеспечивает температурную компенсацию при заряде аккумулятора, а также различные виды электронных защит: от перегрузки, короткого замыкания на солнечной батарее, от переразряда, от перенапряжения и от переполюсовки на аккумуляторе.
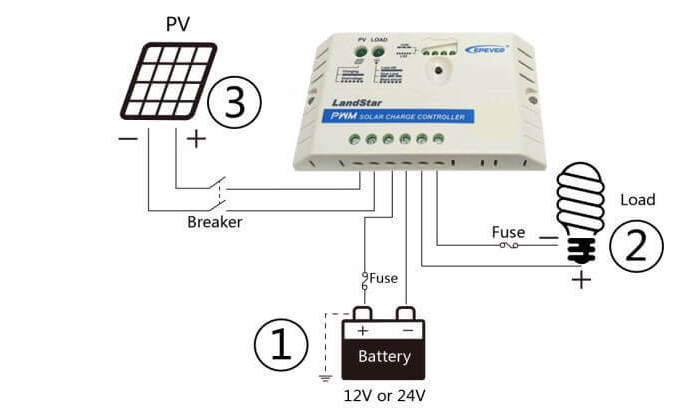
Рисунок 3.10 – Контроллер заряда аккумуляторов от солнечной батареи марки Epsolar LS1024Е и схема его подключения в электрическую цепь. 1 – аккумуляторная батарея, 2- нагрузка (электронные схемы роботизированной платформы), 3- солнечная батарея.
6. Узел управления движением по рельсотрубам (горизонтальное движение платформы). Предназначен для осуществления программ автономного движения в заданное время по рельсотрубам с определенной скоростью по команде компьютера или команде оператора в режиме вперед-назад-стоп. В его состав входят: герконовые датчики местоположения платформы «стоп» и «реверс», два съемных магнита, два ультразвуковых датчика препятствий, три платы стабилизаторов напряжения на 9, 6 и 4 вольта, два микроконтроллера, электронная схема релейной автоматики.
Процесс автономного движения роботизированной платформы по рельструбам осуществляется следующим образом. Первый съемный магнит устанавливают на правой трубе подачи питательного раствора в начале сектора сканирования по горизонтали на уровне траектории движения герконового датчика «стоп», а второй магнит – на левой трубе подачи питательного раствора в конце сектора сканирования по горизонтали на уровне траектории движения герконового датчика «реверс» (рис.3.4). Платформу устанавливают в теплице на трубы подачи питательного раствора таким образом, чтобы ведущие и ведомые колеса опирались на трубы, а герконовый датчик «стоп» располагался напротив первого съемного магнита. По достижению времени, заданного программой компьютера на электронную схему релейной автоматики подается команда «ПУСК», в результате чего напряжение питания подается на двигатель электромеханического узла, вращение вала двигателя передается на пару ведущих колес. Устройство начинает двигаться вперед по трубам. При достижении магнита «реверс», срабатывает герконовый датчик «Реверс», платформа начинает движение назад, до позиции «стоп», задаваемый магнитом и герконовым датчиком «Стоп». Если в процессе движения на пути следования появится препятствие (человек или технологическое оборудование, тара), сработают ультразвуковые датчики препятствия и платформа перейдет на движение от препятствия или остановиться. Ультразвуковые датчики препятствия смонтированы на коротких торцах платформы (рис.3.11), и обслуживающий их микропроцессорный блок настроен таким образом, что реакция происходит на любой тип препятствия, расположенного не более чем в метре по ходу движения.
Герконовые датчики «Стоп» и «Реверс» смонтированы прямо в корпусе нижнего блока, под ведущей осью (рис.3.12), с правой и левой стороны, на таком уровне, чтобы датчики оказались в районе середины рельсотруб в рабочем положении платформы.
Для удобства перемещения платформу внутри помещений с ровным половым покрытием предусмотрены 4 транспортных колеса (рис.3.12), которые закреплены по углам нижнего блока таким образом, чтобы не мешать движению по рельсотрубам. Благодаря колесам перенос (перевоз) робота внутри теплицы для переустановки в другую рабочую зону может быть осуществлен силами одного человека.

Рисунок 3.11 – Конструкция крепления ультразвуковых датчиков препятствия на нижний блок роботизированной платформы.
1 2 3 4

Рисунок 3.12 – Конструкция герконовых датчиков и транспортных колес нижнего блока роботизированной платформы. 1 – корпус нижнего блока роботизированной платформы; 2 – транспортные колеса, 3- герконовый датчик, 4 – ведущая ось электромеханического узла платформы.
7. Электромеханическая система подъема верхнего блока и электронная схему управления подъемом (опусканием) штанги (рис.3.13) предназначена для регулирования высоты расположения лазерных облучателей относительно вегетирующих растений. По мере роста тепличных растений штанга выдвигается вверх (+0,9 м над базовым уровнем) и таким образом создаются условия максимального покрытия вегетирующей массы лазерным излучением, особенно молодых листьев верхнего яруса, которые имеют максимальную фотосинтетическую активность.
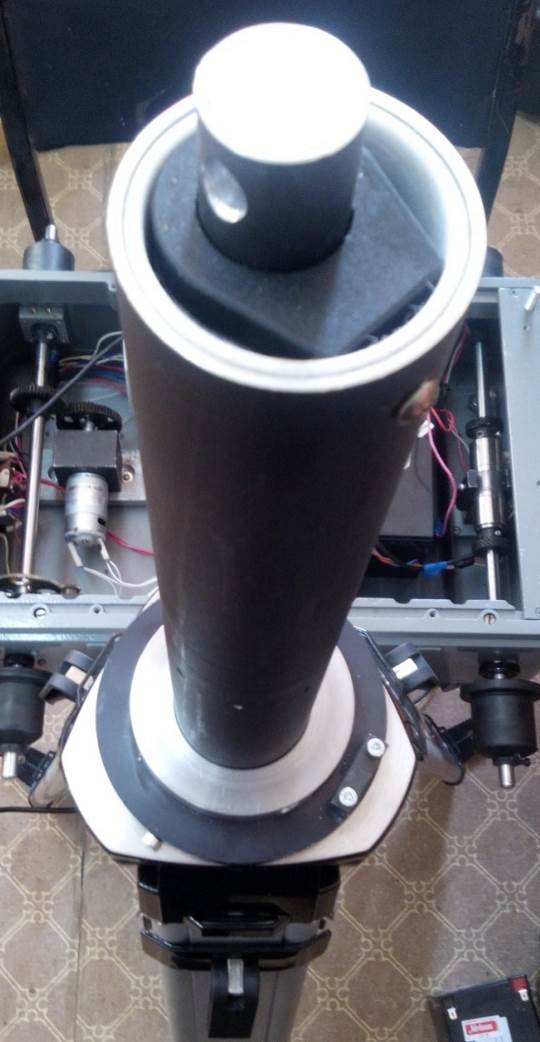 |
 |
Рисунок 3.13 – Штанга вертикального подъема излучателей (слева) и электронная схема управления подъемом (справа).
8. Две пары ведущих и ведомых колес на осях (рис.3.5). Диаметр колес – 46,6 мм. Колеса устанавливаются с возможностью свободного перемещения по осям, на которые насаживаются фиксируются в рабочем положении на конкретном рабочем месте, в теплице, после пробного прогона по рельсотрубам.
9. Узел «плавающей» подвески ведомых колес (рис.3.14). Позволяет «выбирать» неровности на трубах, по которым движется платформа и таким образом обеспечивает движение установки без проскальзывания и холостого вращения ведомых и ведущих колес.
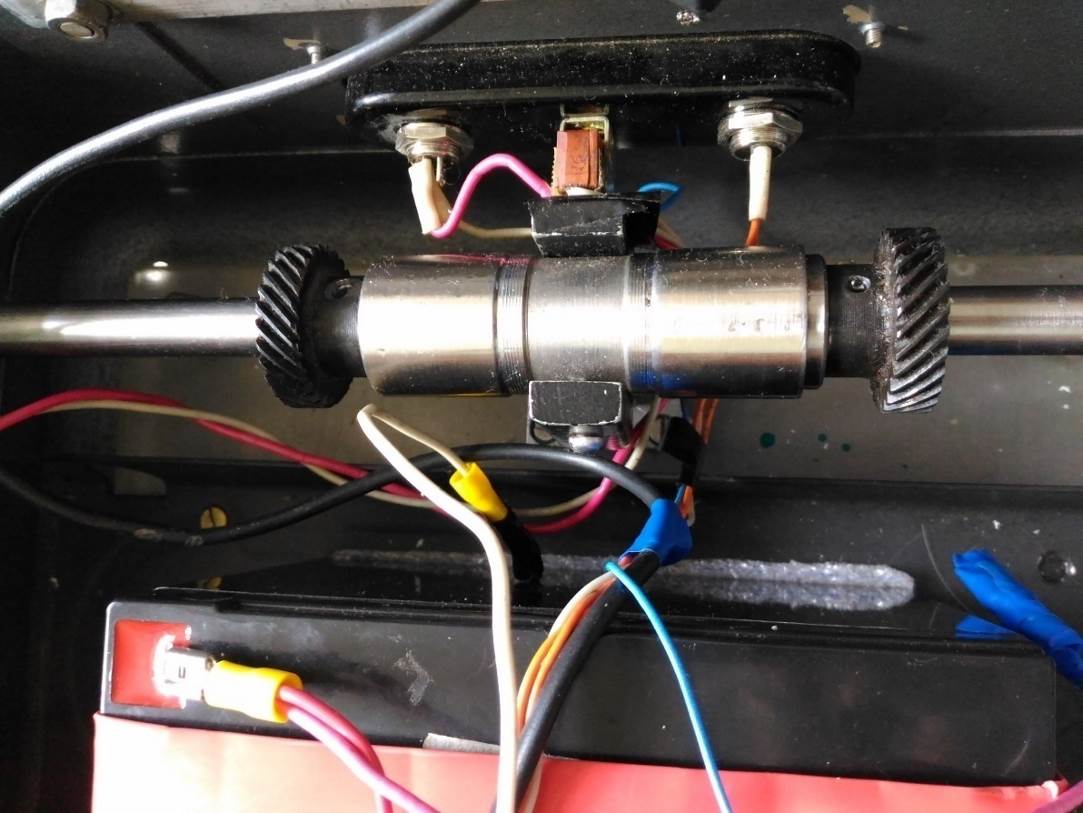
Рисунок 3.14 – Узел крепления оси с ведомыми колесами по типы «плавающей» подвески.
Лабораторные испытания (рис.3.15) показали соответствие технических характеристик электромеханической платформы горизонтального перемещения контрольным показателям, заданным техническими требованиями и достаточную надежность функционирования всех узлов и электронных схем.
Инженерный прототип с ограниченными функциями управления роботизированной платформы прошёл испытания в реальных условиях эксплуатации в теплице и обеспечил экономически значимый биологический эффект (рис. 3.16).

Рисунок 3.15 – Стенд для лабораторных испытаний роботизированной платформы.

Рисунок 3.16 – Инженерный прототип роботизированной платформы в период испытаний в теплице.
4 ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ЛАЗЕРНОГО ОБЛУЧЕНИЯ РАСТЕНИЙ И ЗАЩИТНЫХ БИОПРЕПАРАТОВ
Разрабатываемая роботизированная платформа предназначена для интегрированной защиты тепличныхкультур от болезней. Достигается это посредством воздействия на растения когерентного света определённых энергетических и статистических параметров, а также активированных лазерным излучением бактериальных препаратов. Генерируемое лазерами когерентное излучение возбуждает фоторегуляторную систему клеток, что приводит к повышению их общей функциональной активности. Усиливается также и иммунная реакция растений. В результате снижается поражение патогенной микробиотой.
Разработанные и запатентованные авторами отчёта способы и технические устройства позволяют повысить активность защитных биопрепаратов. В роботизированной платформе они используются для периодического опрыскивания растений. Это происходит автономно, без участия обслуживающего персонала. Таким образом, робот имеет два рабочих органа: когерентное оптическое излучение и суспензию бактерий с антифунгальными свойствами. В процессе выполнения технологических операций эти факторы (физический и биотический) воздействуют на растения, защищая их от болезней. Для достижения наибольшего эффекта необходима оптимизация параметров этих рабочих органов.
Количественно когерентное излучение описывается двумя группами параметров: энергетическими и статистическими. К энергетическим относятся длина волны, плотность мощности, и длительность облучения. Длина волны определяется спектрами поглощения хромопротеидов, осуществляющих фоторегуляцию в клетках. Наиболее важным из них является фитохром В. Под действием красного света происходит его обратимая фотоконверсия в активную форму. Это влияет на многие жизненно важные функции организма, как на метаболическом, так и эпигенетическом уровнях. Таким образом, оптимальным можно считать диапазон длин волн, соответствующий спектру действия активной фотоконверсии фитохрома В: 600 – 700 нм. Эффективные плотность мощности и длительность облучения можно определить на основе анализа литературных данных и по результатам проведенных экспериментов. Этому посвящён раздел 4.1. В разделе 4.2 показана роль статистических параметров квазимонохроматического света, что позволяет обосновать выбор источника излучения. В главе 5 рассматриваются характеристики другого рабочего органа – суспензий бактерий, используемых в защитных биопреператах.
4.1. Оптимизация энергетических параметров лазерного облучения растений и бактерий
4.1.1. Влияние длительности лазерного облучения на прорастание
семян горчицы
В последнее время все большую популярность приобретает ресурсосберегающие технологии в сельском хозяйстве на базе использования средств и методов, позволяющих повышать урожайность и снижать себестоимость продукции (Чазов, 2008).
Согласно данным зарубежной и отечественной литературы, а также ранее полученным нами результатам исследований лазерная стимуляция растений существенно влияет на динамику их роста, сохранность полученной продукции, урожайность, снижает энергоемкость производства овощей защищенного грунта и повышает его рентабельность. При этом важно отметить, что низкоинтенсивный лазерный свет, абсолютно безопасен. Он не обладает тератогенным, мутагенным и канцерогенным свойствами, а наоборот, обеспечивает защиту живого организма от самых различных патогенных факторов химической или физической природы (Москвин, 2016; Чазов, 2008; Даниловских, 2017; Budagovsky, 2015; Li, 2017).
Важным этапом внедрения лазерных технологий в производство является подбор параметров обработки когерентным светом с наиболее высоким биологическим эффектом для различных сельскохозяйственных культур.
Жизнеспособность рассады овощных растений зависит от ряда факторов, но основным из них является интенсивность прорастания семян. Именно на данном этапе первоначальный энергетический потенциал, обеспечивает дальнейшее стабильное и быстрое развитие проростка. Поэтому разработка новых методов интенсификации прорастания семян овощных культур с помощью экологически чистых и энергосберегающих технологий актуальна в современных экономических условиях (Алексеева, 2018).
Предпосевная лазерная обработка семян огурца в тепличном хозяйстве Удмуртской республики дала возможность повысить урожайность данной культуры до 34%, снизить себестоимость продукции, увеличить прибыль. В целом такая обработка имеет очень низкие энергетические и финансовые затраты (Чазов, 2008).
В условиях Северо-Запада России установлен эффект лазерной стимуляции капусты кольраби на длине волны 650 нм, мощностью излучения 150 мВт, продолжительностью облучения 30 с. Вследствие облучения происходит ускорение синтеза белков и углеводов, которое приводит к увеличению урожайности. Общее количество белка в собранных стеблеплодах кольраби в образцах опытной группы было выше на 6%, углеводов – на 27%, а средняя масса стеблеплода на 30% выше соответствующих показателей образцов контрольной группы (Филина, 2020).
Установлено, что применение лазерного излучения дражированных семян сахарной свёклы стимулирует и активизирует рост и развитие растений, тем самым обеспечивая сокращение периода достижения ими биологической и технологической спелости. Это подтверждается морфологическими показателями (увеличение количества листьев на растении, средней площади ассимиляционной поверхности, снижение коэффициента отношения массы ботвы к массе корнеплодов) и результатами оценки технологических достоинств корнеплодов (снижение содержания несахаров мелассообразователей, повышение прогнозируемого выхода сахара и его извлекаемости, снижение МБ-фактора). Определена наиболее эффективная экспозиция лазерной обработки семян 10 мин (Подвигина, 2019).
С 2000-х годов сотрудники Новгородского государственного университета им. Ярослава Мудрого проводят исследования по изучению влияния низкоинтенсивного лазерного излучения (НИЛИ) как фактора, стимулирующего рост и развитие животных и растений. Экспериментально установлено, что лазерное излучение оказывает положительное воздействие на рост и развитие растений, не вызывает травматизацию и позволяет увеличить урожайность на 20 — 30%. На основании этого сделан вывод, что применение НИЛИ позволит в дальнейшем снизить количество применяемых удобрений и средств химической защиты, что станет очередным шагом для перехода к органическому земледелию и снижения антропогенного воздействия (Пчелина, 2020).
Исследователи Московской сельскохозяйственной академии им. К.А. Тимирязева показали, что лазерное излучение позволяет использовать собственный потенциал растений для увеличения всхожести их семян, роста проростков, продуктивности и урожайности будущей сельскохозяйственной продукции. При обработке влажных семян физическими факторами происходит мобилизация сил и высвобождение энергетических резервов организма, активируются физиолого-биохимические процессы на ранних этапах прорастания семян. Наиболее эффективным при облучении семян оказалось лазерное излучение импульсного режима с длиной волны в пределах 400…700 нм, мощностью 105…108 Вт, с 50…100 вспышками в импульсе. Для каждого вида семян необходимо искать оптимальный режим обработки с целью стимуляции развития растений и их хозяйственно ценных признаков (Навроцкая, 2018).
В Польше проводили исследования по определению изменений некоторых биохимических и физиологических процессов, происходящих в семенах и проростках люпина белого и фасоли белой после предпосевной обработки лазерными лучами. Установлено, что такая обработка семян значительно повышает активность амилолитических ферментов в семенах. Наибольшая дифференциация ферментативной активности отмечалась через 120 ч от момента посева. Активность этих ферментов в семенах обоих испытуемых видов растений была сходной и имела одинаковую динамику. Облучение семян привело к более раннему и равномерному их прорастанию. Наибольший рост семян обоих видов растений был отмечен после пяти воздействий лазерных лучей (Podlesny, 2012).
Иранскими учеными исследовано влияние лазерной обработки на урожайность рапса и его компонентов в условиях засоления при различных временах облучения. Повышение уровня соли оказывало негативное и значительное влияние на урожайность, снижало количество семян на стручок, количество стручков на растение, длину стручка и высоту растения. Результаты показали, что 45-минутная лазерная обработка оказала значительное влияние на урожайность и компоненты урожая, а также снизила неблагоприятное воздействие засоления (Mohammadi, 2012).
На опытных участках Краснодарского опытного лесхоза проводились исследования по влиянию лазерной обработки на качество саженцев около ста видов древесно-кустарниковых растений. Было установлено, что облученные черенковые саженцы существенно отличаются от необлученных по всем параметрам. Так, у опытных образцов отмечено увеличение корневой массы и глубины залегания корней, эффект обеззараживания, повышение устойчивости к патогенной микробиоте, увеличение приживаемости черенков на 10 — 20%, сокращение сроков перехода к цветению и созреванию на 1 — 2 года, сокращение сроков выращивания сеянцев и саженцев до стандартных размеров. Различие показателей в пользу облученных черенковых саженцев явно свидетельствует о повышении их жизнеспособности, что позволяет рекомендовать этот способ при подготовке сеянцев и саженцев лесных культур для высадки на постоянное место произрастания с неблагоприятными условиями, такими как загрязнение почв нефтепродуктами, засуха, жара и др. (Максименко, 2020).
Горчица белая – одна из наиболее популярных культур для посадки на микрозелень (микрогрины), а полученные растения один из самых продаваемых продуктов в мире. Микрогрины — это специфический тип овощей, которые относятся к группе «функциональных продуктов питания». В настоящее время горчица активно внедряется в ассортимент тепличных хозяйств. Одним из приоритетных направлений развития тепличного овощеводства является внедрение малообъёмной узкостелажной ярусной технологии (вертикальное овощеводство). При выращивании на таких конструкциях микрогринов можно получать экологически безопасную и биохимически ценную пряно-вкусовую и салатную зеленную продукцию в период межсезонья (Пинчук, 2019).
Выращивание листовых овощей в закрытых помещениях становится все более популярным подходом, и в рамках этой производственной системы искусственный свет обеспечивает единственный источник излучения для фотосинтеза и фоторегуляции. С использованием светоизлучающих диодов производители имеют возможность манипулировать освещением для достижения конкретных производственных целей (Jones-Baumgardt, 2019).
В отечественной и зарубежной литературе широко обсуждается вопрос регуляция роста, развития, физиологических процессов растений горчицы путем изменения параметров освещенности.
Проводилась оценка влияния дополнительного кратковременного освещения красными светодиодами на антиоксидантные свойства микрогринов. Микрогрины горчицы выращивали до сбора урожая в теплице на торфяном субстрате при дневном свете с дополнительным освещением. На предуборочной стадии за 3 дня лампы дополнялись светодиодами 638 нм, тогда как эталонные растения продолжали оставаться в условиях освещения, идентичных начальным условиям роста. В связи с повышенной активностью метаболической системы для защиты от мягкого фотоокислительного стресса были изменены антиоксидантные свойства микрогринов. Общая концентрация фенолов в горчице увеличилась с добавлением красного цвета до 40,8%, содержание аскорбиновой кислоты на 25,0%. Общее количество антоцианов достоверно снизилось на 45,1% (Samuolienė, 2012).
Показана возможность манипулировать уровнем данного пигмента через воздействие света. Микрогриновые растения горчицы культивировали на растущих подушечках в контролируемой среде под 14 часовым фотопериодом. После появления первого настоящего листа были инициированы дополнительные световые обработки. Микрогриновые растения собирали после того, как световые обработки накапливались 36 ч. Отмечено увеличение концентрации зеаксантинов (антиоксидантные каротиноиды) в микрогринах горчицы путем воздействия дополнительного света непосредственно перед сбором тканей. Повышение уровня зеаксантинов в микрогринах с помощью простого изменения управления освещением может быть эффективным способом для производителей повысить питательную ценность этой все более популярной специализированной культуры (Kopsella, 2012).
В экспериментах, где использовалась система из пяти мощных твердотельных осветительных модулей со стандартными светодиодами с длинами волн 447 нм, 638 нм, 665 нм и 731 нм, оценивали эффекты светодиодов 520 нм, 595 нм и 622 нм, дополняющих стандартное освещение. Концентрация различных каротиноидов в горчице была выше при освещении 110 — 220 мкмоль/м2/с. При всех дополнительных длинах волн общее содержание каротиноидов увеличивалось. Дополнительный зеленый свет усиливал накопление лютеина и β-каротина в горчице (Brazaitytėa, 2015).
Изучалось влияние интенсивности света на рост, урожайность и качество горчицы, выращенной в ростовой камере. Светодиоды использовались для обеспечения шести целевых фотосинтетических обработок плотности потока фотонов: 100, 200, 300, 400, 500, и 600 мкмоль/м2/с с соотношением потоков фотонов синий: красный как 15: соответственно и 16-часовым фотопериодом. По мере перехода от 100 до 600 мкмоль/·м2·/с свежий вес зеленой массы горчицы увеличивался на 0,67 кг/·м2 (82%), сухой вес — на 65 г/м2 (145%). При этом уменьшалась длина гипокотиля (Jones-Baumgardt, 2019).
Результаты исследований по влиянию параметров освещения на различные физиологические процессы, происходящие в растительном организме, необходимы для оптимизации технологических процессов при выращивании овощей, в том числе микрогринов, в условиях защищенного грунта. Таким образом, данные исследования являются актуальными и требуют дальнейшего изучения.
Проведенные ранее исследования свидетельствуют о том, что лазерное излучение обладает стимулирующим действием на физиологические процессы в растениях. Поэтому его использование в условиях защищенного грунта является перспективным, так как позволяет повысить продуктивность растений и снизить пестицидную нагрузку, что соответствует принципам органического земледелия (Маслова, 2019).
Для подбора оптимальных параметров лазерного облучения проводили серию опытов с различными длительностями экспозиций в условиях влажной камеры (на фильтровальной бумаге и кокосовом субстрате). Для облучения семян горчицы использовали полупроводниковый лазер с длиной волны 660 нм и плотностью мощности 2,5 Вт/м2. Контролем во всех вариантах опытов служили семена, без облучения.
Семена горчицы проращивали в чашках Петри на фильтровальной бумаге. Экспозиции 5, 15, 30, 60, 120, 240 секунд. В каждой чашке Петри по 20 штук семян в пятикратной повторности (рис. 4.1).
В другом варианте опыта семена проращивали на кокосовом субстрате, состоящем из измельченных кокосовых стружек и волокна. В каждой чашке Петри было по 20 штук семян в пятикратной повторности. Экспозиции 5, 15, 30, 60, 120, 240 и 480 секунд. Учет числа проросших семян и длины образовавшихся проростков проводили на четвертые сутки культивирования.
В третьей серии опытов учет проводился по длине проростков. Для облучения семян использовали полупроводниковый лазер с длиной волны 660 нм и плотностью мощности 2,5 Вт/м2. Контролем служили семена, без облучения.
Для подбора оптимальных параметров лазерного облучения проведены исследования с семенами горчицы. В эксперименте, где был выбран ряд экспозиций от 5 с до 240 с, а облученные семена проращивали на влажной фильтровальной бумаге, установлена лазерная стимуляция во всех вариантах опыта. На лучших длительностях экспозиций (5 с, 30 с и 60 с) стимуляция прорастания семян составила 19,6%; 10,1% и 10,1% от контроля соответственно (рис. 4.2.а).

Рисунок 4.1 – Проростки горчицы, полученные из семян облученных лазером
В следующем эксперименте проращивание семян проводили в условиях приближенных к технологии выращивания проростков в теплице, т.е. на кокосовом субстрате. Облучение осуществляли в течение 5 с – 480 с. Число образовавшихся проростков во всех вариантах с применением лазера было больше, чем в контроле на 13,3% – 20%. Наилучшие результаты были получены в опытных вариантах с длительностями экспозиции 30 с и более (рис. 4.2. б).
Длина трехсуточных проростков, полученных из семян после воздействия лазерного излучения, колебалась от 10 мм до 13 мм. При облучении в течение 5 с и 60 с данный показатель был больше контрольного значения (10 мм) на 20,0%; а при облучении в течение 30 с и 480 с – на 30,0% (рис. 4.3).
Проведенные исследования показали, что лазерная стимуляция прорастания семян горчицы отмечается уже на коротких экспозициях от 5 с до 60 с. Их более целесообразно применять, так как это является наиболее технологичным для использования в теплицах. Поэтому дополнительно были проведены исследования эффективности лазерного облучения семян в течение 5 с – 60 с для стимуляции наращивания зеленой биомассы горчицы. При этом было установлено, что на 4-е сутки наибольшая длина стеблей отмечалась у проростков, полученных из семян облученных в течении 40 с и 60 с. Она составила 17,6 мм и 17,2 мм, т.е. 17,4% и 14,7% от контроля соответственно (рис. 4.4.).
а
б
Рисунок 4.2 – Всхожесть семян горчицы, облученных лазером:
а) в условиях влажной камеры при длительностях экспозиции 5с – 240 с;
б) на кокосовом субстрате при длительностях экспозиции 5с – 480 с
Рисунок 4.3 – Длина проростков горчицы, облученных лазером
при длительностях экспозиции 5с – 480 с на кокосовом субстрате.
Рисунок 4.4 – Длина проростков горчицы, облученных лазером
при длительностях экспозиции 40с и 60с на кокосовом субстрате.
У опытных образцов, где длительность экспозиции составила 5 с — 30 с, длина стеблей колебалась от 15,7 мм до 15,9 мм, что незначительно отличалось от контрольного значения, в среднем на 5,2%. При этом в варианте без использования лазера данный показатель был равен 15,0 мм.
Таким образом, проведенный ряд экспериментов позволил выявить, что лазерное облучение семян горчицы в течение от 5с и выше позволяет в значительной степени стимулировать наращивание зеленой биомассы горчицы, а также технологично для включения в процесс культивирования растений в теплице. Максимальный биологический эффект отмечен при длительностях экспозиции 40с и 60с.
4.1.2. Влияние лазерного облучения на состояние хлорофиллсодержащих тканей яблони, зараженных патогенной бактерией
Pseudomonas suringae Van Hall
Реакция растений на то или иное внешнее воздействие, в том числе на патогенный фактор, регистрируется в виде изменений активности физиологических процессов. Многие возбудители болезней растений не приводят к быстрой гибели хозяев, однако происходит нарушения структуры фотосинтетического аппарата клеток: снижается число хлоропластов на единицу площади листа, их объем, концентрация и активность хлорофилла.
Отрицательное влияние на фотосинтез бактериальных инфекций связано прежде всего с интенсивным разрушением структуры хлоропласта, что обусловлено активным выделением бактериями токсинов в ткани хозяина (Маслова, 2018).
Инфицирование растений фитопатогенами различных таксономических групп приводит к снижению эффективности аккумулирования световой энергии фотосинтетическим аппаратом листьев, что на ранних стадиях происходит вследствие сокращения пула акцепторов электронов. На более поздних стадиях патологический процесс усугубляется, что ухудшает фотосинтетическую активность листьев (Гуляева, 2017).
Наиболее важный физиологический параметр состояния растений, активность их фотосинтезирующего аппарата, можно оценить с помощью флуоресцентного анализа, который носит неразрушающий характер и позволяет регистрировать динамические процессы. Такая экспресс-диагностика функционального состояния растений в короткие сроки выявляет биологический эффект от воздействия того или иного внешнего фактора на исследуемый объект или процесс. Лазерный флуоресцентный метод мониторинга и контроля состояния растений, показывает результаты обнаружения стрессовых состояний растений путем дистанционного измерения (Lichtenthaler, 1988; Веселова, 1994; Веселовский, 1990; Будаговская,2016; Федотов, 2016; Белов, 2015).
Ряд научных публикаций подтверждает, что предотвратить развитие патологического процесса помогает лазерная обработка растений. Обладая стимуляционным эффектом при воздействии на их ткани, когерентный свет способствует повышению иммунитета у сельскохозяйственных культур. (Маслова, 2018; Подвигина, 2018; 2019; Максименко, 2020).
Адаптогенные свойства лазера также описаны китайскими исследователями. Эффекты акклиматизации и репарации повреждений УФ-излучением, индуцированные He-Ne лазером (632,8 нм), были отмечены у растений Arabidopsis thaliana в ответ на дополнительный УФ — стресс. Наблюдалась тенденция к увеличению параметров роста у растений, подвергнутых комбинированной обработке He-Ne лазером и УФ-светом, по сравнению с растениями, подвергнутыми воздействию только усиленного УФ-света. Фотосинтетическая эффективность и выживаемость проростков были значительно выше при комбинированных обработках, чем только при обработке УФ-светом. Были повышены уровни накопления флавонола в листьях обработанных лазером (Gao, 2017).
Изучение патогенных свойств возбудителей болезней и ответной реакции растительного организма на заражение методом предварительного поранения широко применяется, так как в большинстве случаев оно дает положительный результат (Corba, 2008; Кудина, 2010; Горовик, 2018).
При использовании листовых высечек поранение располагается по краю исследуемого участка листа. Следует отметить, что высечки, полученные с помощью сверла определенного размера, изначально имеют одинаковую площадь, что позволяет объективно оценить и сравнить площадь распространения поражения во всех вариантах опыта.
Проведение испытаний свойств фитопатогенов в лабораторных условиях позволяет контролировать развитие возбудителя, своевременно его обезвредить и избежать его распространения на растениях-хозяевах в естественных условиях произрастания.
Для выявления характера воздействия лазерного облучения на состояние хлорофиллсодержащих тканей, зараженных патогенной бактерией, использовали высечки листьев яблони сорта Антоновка. Их помещали во влажные камеры после обработки суспензией бактерии Pseudomonas syringae Van Hall (возбудитель бактериального некроза плодовых культур) (рис. 4.5). После этого высечки листьев облучали полупроводниковым лазером с длиной волны 660 нм плотностью мощности 2,5 Вт/м2. Экспозиции 120 и 480 секунд. Контролем служили высечки листьев, необлученные лазером (рис. 4.6). Так же для сравнительной оценки в эксперимент были включены варианты без использования искусственного заражения.
Таким образом, в эксперименте использовали следующие варианты обработки листовых высечек яблони:
- контроль (вода);
- вода+лазер 120с;
- вода+лазер 480с;
- бактериальная суспензия;
- бактериальная суспензия+лазер 120с;
- бактериальная суспензия+лазер 480с.
Оценку состояния хлорофиллсодержащих тканей проводили на 7 -е сутки на приборе LPT (Россия).
По показателю удельной фотосинтетической активности (Kft) было установлено, что облучение листовых высечек яблони сорта Антоновка способствовало увеличению данного критерия как в эксперименте с искусственным заражением бактерией P.syringae, так и без него.
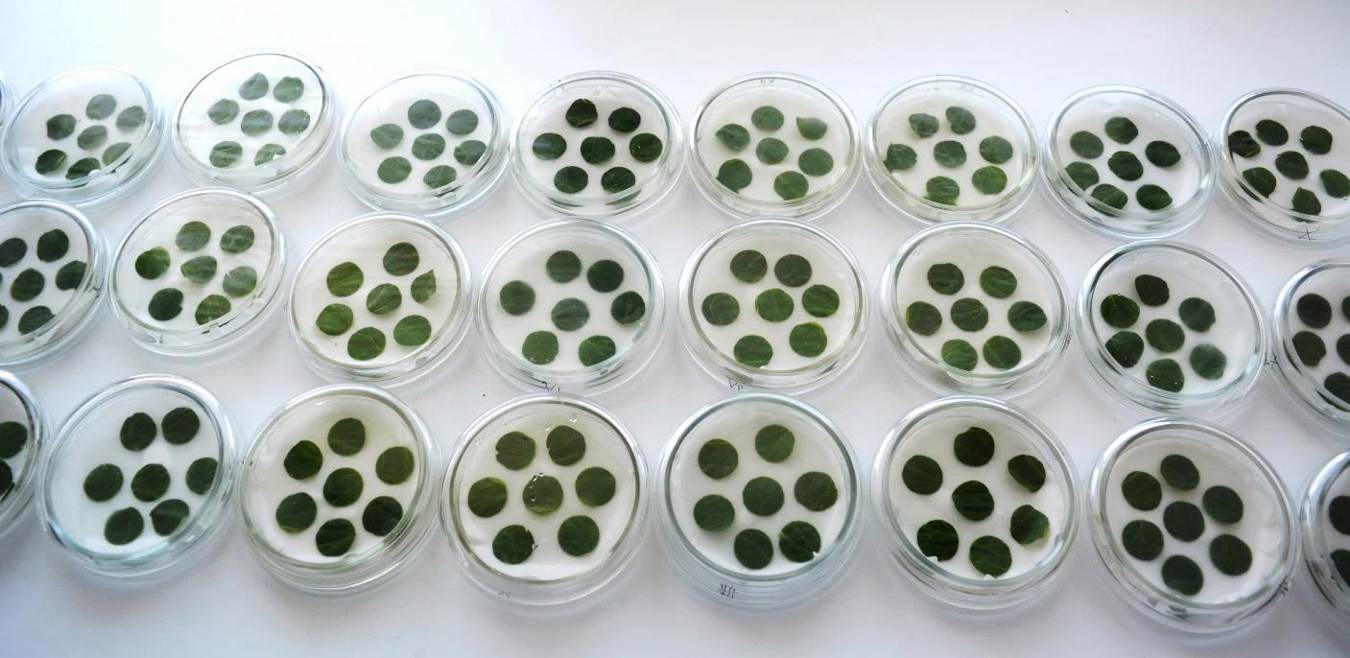
Рисунок 4.5 – Листовые высечки яблони сорта Антоновка в условиях
влажной камеры.
На 7-е сутки после закладки опыта, когда видимых изменений ещё не наблюдалось, в варианте с использованием инокуляции установлено снижение интенсивности фотосинтеза в среднем на 5,0% по сравнению с показателем у листовых высечек, не подвергавшихся обработке бактериальной суспензией, т.е. с 0,427 у.е. до 0,406 у.е.
Удельная фотосинтетическая активность неинфицированных хлорофиллсодержащих тканей в вариантах с использованием когерентного света составила 0,502 у.е. и 0,546 у.е. при длительностях экспозиции 120 с и 480 с соответственно. Это на 17,6% и на 27,9% больше, чем величина изучаемого показателя в контроле (0,427 у.е.).
На инокулированных листовых высечках так же отмечен эффект лазерной стимуляции. Обработка когерентным светом способствовала активизации хлорофиллсодержащих тканей, на что указывает критерий Kft. При облучении в течение 120 с и 480 с данный показатель составил 0,539 у.е. и 0,494 у.е. соответственно, а в контроле 0, 406 у.е. Таким образом, лазерная стимуляция составила 32,8 % и 21,7% соответственно (рис. 4.7).
Проведенные исследования показали, что облучение когерентным светом позволило повысить фотосинтетическую активность тканей листа яблони сорта Антоновка, в том числе зараженных бактерией P.syringae, что свидетельствует о стимуляции защитных реакций хозяина в отношении патогена.

Рисунок 4.6 – Процесс облучения листовых высечек на вращающейся
платформе.
| а | б |
Рисунок 4.7 – Влияние лазерного облучения на фотосинтетическую активность хлорофиллсодержащих тканей листа яблони сорта Антоновка:
а) листовые высечки без инокуляции бактерией P.syringae;
б) листовые высечки инокулированные бактерией P.syringae.
4.1.3. Оптимизация системы защиты овощных растений от болезней
посредством подбора энергетических параметров
лазерного облучения биопрепаратов
Последние годы проблема биологической защиты растений становится все популярнее, проводится апробация известных биопрепаратов, а также создаются их новые формы, разрабатываются комплексные подходы к решению экологически безопасной защиты растений от болезней сельскохозяйственных растений (Петровский, 2017, Коломиец, 2019).
В течение последнего десятилетия почти ежегодно на томатах наблюдается эпифитотийное развитие альтернариоза. При этом урожай томатов может снижаться на 20 – 40%. Распространена данная болезнь в большинстве районов возделывания томатов. Наибольший вред инфекция наносит растениям в пленочных теплицах (Станчева, 2005; Василиогло, 2018).
Представители рода Alternaria широко распространены в природе и встречаются повсеместно: в почве, на растительных остатках, в воздухе и т.д. Это, в основном, сапротрофные грибы, которые играют значительную роль в круговороте органики в природе. В последние годы все чаще появляется информация о растущем экономическом значении альтернариевых грибов. Некоторые виды приобрели патогенные свойства и вызывают болезни важных сельскохозяйственных культур (Буровинская, 2019).
Альтернариоз, или коричневая гниль Alternaria alternata (Fr.) Keissl является возбудителем опасной болезни томата – альтернариоза. Гриб поражает все надземные органы растений (листья, стебли, черешки листьев, плоды, плодоножки). Болезнь проявляется в виде темных, округлых пятен в местах поражения, поверхность которых покрывается бархатистым черным налетом, состоящим из спор и грибницы паразита. Зараженные плоды либо опадают, либо преждевременно созревают. Переносятся споры гриба главным образом потоком воздуха, течением поливной или дождевой воды (Хромова, 2017; Ганнибал, 2011; Гаджиева, 2016; Simmons, 1994; Rodrigues, 2010).
В настоящее время исследования грибов рода Alternaria охватывают несколько направлений, включающих оценку возможных токсических эффектов микотоксинов in vitro и in vivo и разработку методик их обнаружения. Изучено и описано свыше 300 вторичных метаболитов грибов рода Alternaria, проявляющих биологическую активность по отношению к растениям, бактериям и грибам (Далинова, 2020).
На пасленовых культурах чаще всего выявляются мелкоспоровые виды Alternaria, такие как A. tenuissima и A. arborescens, A. solaniиA. tomatophila, которые вызывают развитие крупных некрозов листьев, стеблей, плодов. Виды A. alternata и A. infectoria встречаются редко (Буровинская, 2019).
По органотропной специализации грибы рода Аlternaria относятся к патогенам, которые могут осуществлять питание на листьях и плодах перца. Часто из растений перца выделяются А. solani, A. alternata и A. tenuissima (Орина, 2010; Паластрова, 2017).
Использование в борьбе с A. alternata химических фунгицидов приводит к накоплению их в растениях и плодах. Снизить пестицидную нагрузку возможно путем включения в систему защиты растений биологических средств, которые эффективно подавляют фитопатогены (Новикова, 2017).
Всё более актуальным направлением становится экологизация системы защиты растений от болезней с применением микробиологических препаратов. Наибольший интерес, с точки зрения спектра подавляемых патогенов и возможностей, выпускаемых препаративных форм, представляют такие препараты как Алирин — Б, Витаплан СП, Гамаир, созданные на основе бактерии Bacillus subtilis (Приходько, 2018; Орлова, 2015; Новикова, 2019; Власов, 2017).
Флуоресцентные бактерии Pseudomonas в составе биопрепаратов также эффективно подавляют болезни растений и вызывают у них системную резистентность, кроме того они производят антибиотики и сидерофоры, которые играют важную роль в антагонистических взаимоотношениях бактерий с почвенными фитопатогенами, а также они способствуют усилению роста корней, увеличению массы листьев растений (Хмель, 1997; Jain, 2016; Маслак, 2019; Пищик, 2019).
Несмотря на перспективы использования БСЗР, по эффективности и стоимости химические препараты часто оказываются более конкурентоспособными. В связи с этим необходимо разрабатывать средства и методы стимуляции микроорганизмов, входящих в состав биофунгицидов.
По результатам исследований, проводимых в рамках ГЗ МСХ с 2016 по 2019 гг. «Разработка средств и методов фотоники для повышения активности препаратов биологической защиты растений» установлено стимулирующее действие лазерного излучения на активность биопрепаратов защиты растений. Выявлено, что активность биопрепаратов после хранения в различных условиях может снижаться по сравнению с заявленными показателями в десятки раз, что обосновывает необходимость разработки способов повышения эффективности биопрепаратов защитного действия.
Обработка когерентным низкоинтенсивным (1 — 3 Вт/м2) светом в течение 15 — 960 с приводит к активизации защитных препаратов. Использование полупроводникового лазера для бактериальных суспензий оказалось более эффективным, чем применение гелий-неонового.
Выявлено, что воздействие когерентного света способно существенно и статистически достоверно повысить число КОЕ в рабочих растворах биопрепаратов (Алирина-Б на 45,95%, Гамаира на 4,68%, Фитоспорина на 71,4%, Пралина на 66,04%, Витаплана на 64,11%).
Лазерное облучение способствовало увеличению биомассы колоний B.subtilis из Алирина — Б на 4,9%, из Гамаира на 9,3%, из Пралинана 34,8%, P.fluorescencиз Витаплана на 15,3%, а T. lignorum из Триходермина на 68,4%.
Облучение когерентным светом стимулирует выработку у бактерий метаболитов, в том числе микотоксического действия, что было установлено на различных моделях (F. охуsporum + P. fluorescensиз Витаплана; A. alternate + B. subtilis из Фитоспорина).
Применение облученного Алирина-Б и Гамаира наиболее существенно снижает количества клеток Fusarium solani в ризосфере растений защищенного грунта (на 78,5% и 49,5% соответственно) в сравнении с образцами без облучения. Данный эффект сохраняется и на 10-е сутки после закладки опыта.
При совместном культивировании патогенных грибов и бактерий-антагонистов из препаратов (P. fluorescens и B.subtilis,) обработанных когерентным светом, наиболее выраженная стимуляция биоагентов отмечалась в варианте с длиной волны 661 нм, что привело к увеличению зоны подавления роста патогенного гриба на 40%, где использовалось лазерное излучение с длиной волны 633 нм. Обработка когерентным светом бактерии P. fluorescensиз препарата Витаплан-Экстра и гриба Trichoderma harzianum из Глиокладина стимулировала проявление их антагонистических свойств по отношению к грибу A. alternata на 17% и 100% соответственно.
В связи с этим важной задачей является поиск активных биоагентов, проявляющих ярко выраженные антагонистические свойства в отношении возбудителя альтернариоза.
В эксперимент были включены растения томата сорта Орлик, выращенных в горшках в условиях пленочной теплицы в весенне-летний период. Сорт Орлик −включен в Госреестр по Российской Федерации для выращивания в открытом грунте и под пленочными укрытиями. Очень ранний. Растение детерминантное. Лист среднего размера, зеленый, соцветие простое. Плодоножка с сочленением, плод округлый, гладкий, плотный. Окраска незрелого плода светло-зеленая, зрелого — оранжевая, число гнезд 2. Масса плода 53 г. Урожайность товарных плодов под пленочными укрытиями 5,2 кг/м2.
Провокационным фоном для развития альтернариоза на растениях томата служил грунт, зараженный Alternaria alternata. В качестве субстрата использовали торфяную смесь марки Агробалт, в которою вносили инокулюм патогена. Состав смеси: верховой сфагновый торф низкой степени разложения, известняковая (доломитовая) мука, комплексное минеральное удобрение. Основные питательные вещества: N — 150 мг/л; Ca — 120 мг/л; Mg — 30 мг/л; P2O5 — 150 мг/л; K2O — 250 мг/л; рН — 5; влажность — не более 65.
Для определения оптимальных длительностей экспозиции облучение лазером биопрепаратов Алирин-Б и Ризоплан проводили в концентрации в 2 раза ниже, чем рекомендовано производителем (Алирин — Б – 2,5г/л; Ризоплан – 0,5%) на полупроводниковом лазере с длиной волны 660 нм и плотностью мощности 2,5 Вт/м2.
Варианты опыта:
1) контроль (вода),
2) БП без облучения,
3) БП облучение 60 с,
4) БП облучение 120 с,
5) БП облучение 240 с,
6) БП облучение 480 с.
Облученными рабочими растворами обрабатывали листья томата и перца с горшечных растений. Их инкубировали в условия влажной камеры в течение 2-х суток. После делали смывы с листьев по 3 фрагмента площадью 1 см2 и помещали в пробирки с 10 мл стерильной воды, которые переносили в шейкер инкубатор и встряхивали при 200 оборотов в минуту в течение 40 мин. Полученные смывы высевали по 100 мкл на среду КГА с антибиотиком в чашки Петри. На 5-е сутки проводили учет и идентификацию образовавшихся колоний микроорганизмов, высчитывали число КОЕ гриба A. alternata на 1 см2поверхности листа.
С целью оценки эффективности лазерного облучения для активизации защитных биопрепаратов в борьбе с альтернариозом овощных культур в условиях пленочной теплицы облучение проводили на полупроводниковом лазере с длиной волны 660 нм и плотностью мощности 2,5 Вт/м2 в течение 480 с (длительность экспозиции экспериментально подобрана в предыдущих опытах). После облучения рабочие растворы биопрепаратов перед применением выдерживали в течение 2 часов на свету. Внесение биопрепаратов в грунт начинали в фазу появления 3-4 настоящего листа и продолжали до сбора урожая. В период роста и развития растений проводили оценку степени поражения болезнями, высоты растений согласно общепринятым методикам.
Растения томата высаживали в горшки с грунтом объемом 2,5 л. Их размещали в пленочной теплице по 12 штук на 1 м2.
В разных вариантах опыта для обработки грунта использовали:
1) Алирин-Б;
2) Алирин-Б + лазерное облучение;
3) Ризоплан;
4) Ризоплан + лазерное облучение.
Контролем служили растения без применения биопрепаратов, их полив проводился только водой.
В связи с тем, что препараты применяли на растениях в условиях высокого уровня инфекционного фона с уже развившимися признаками поражения альтернариозом, концентрацию рабочих растворов, подвергшихся лазерному облучению, не понижали, а следовали рекомендациям производителя. В контрольных вариантах облучение не применяли.
При использовании рабочих растворов Алирина – Б, облученных в течение 60с -480с для обработки листьев томата, их обсемененность клетками патогенного гриба A. alternatа составила 72,3 КОЕ/см2; 27,7 КОЕ/см2; 43,3 КОЕ/см2 и 38, 7 КОЕ/см2 соответственно, в контроле – 67,0 КОЕ/см2. Таким образом, в вариантах опыта с экспозициями 120 — 480 с отмечено снижение числа КОЕ исследуемого патогена на 1 см2 поверхности в среднем на 32,1% по сравнению с необлученным препаратом. Наиболее эффективной оказалась экспозиция 120 с (стимуляция составила 58,7%) (рис. 4.8).
Рисунок 4.8 – Обсемененность поверхности листьев томата после обработки необлученным и облученным лазером Алирином – Б при разных длительностях экспозиции.
В эксперименте с Ризопланом во всех вариантах, где применялось лазерное облучение препарата, в смывах с поверхности листьев томата отмечено полное отсутствие клеток и спор A. alternatа, в то время как в контрольном образце выявлена обсемененность данным грибом, которая составила 22,3 КОЕ/см2 (рис. 4.9).
Листовая поверхность перца была обработана облученными рабочим раствором препарата Алирин Б. В результате показатель её обсемененности возбудителем альтернариоза колебался от 13,9 КОЕ/см2 до 23,8 КОЕ/см2, при этом в контроле он составил 22,3 КОЕ/см2. Снижение числа клеток гриба в смывах с поверхности листьев отмечено при использовании экспозиции 480 с на 37,7% соответственно. В остальных вариантах опыта различия с контролем были в пределах ошибки среднего значения (рис. 4.10).
Рисунок 4.9 – Обсемененность поверхности листьев томата после обработки необлученным и облученным лазером Ризопланом при разных длительностях экспозиции.
Рисунок 4.10 – Обсемененность поверхности листьев перца после обработки необлученным и облученным лазером Алирином – Б при разных длительностях экспозиции.
Подобный эксперимент проведен на растениях перца с использованием препарата Ризоплан. Было выявлено, что облучение его рабочего раствора позволило снизить обсемененность обработанной листовой поверхности до
16,7 — 27,8 КОЕ/см2 в зависимости от экспозиции. При этом в варианте без применения лазера тот же показатель был равен 33,4 КОЕ/см2, т.е. эффективность облучения составила 50,0% при обработке препарата когерентным светом в течение 60 с, 120 с, 240 с и 16,8% — в течение 480 с (рис. 4.11).
Проведенные эксперименты позволили сделать вывод об эффективности применения лазерного облучения для стимуляции фунгицидных свойств БСЗР. При этом в большинстве случаев наиболее эффективными являются длительности экспозиции 120 с, 240 с и 480 с(таблица. 4. 1.).
Рисунок 4.11 – Обсемененность поверхности листьев перца после обработки необлученным и облученным лазером Ризопланом при разных длительностях экспозиции.
Проводили оценку зараженности томата альтернариозом в условиях пленочной теплицы с применением когерентного света для активизации биопрепаратов. Проведенные ранее исследования показали эффективность лазерного облучения рабочих растворов БСЗР в течение 480 с.
В ходе исследований выявлено, что заражение A. alternatа привело к гибели 61,7 % растений томата, обработанных препаратом Алирин — Б без облучения, и 36,2% растений погибло в варианте с использованием биопрепарата после лазерной стимуляции (рис. 4.12).
Таблица 4. 1 – Обсемененность поверхности листьев томата и перца после обработки необлученным и облученным лазером биопрепаратами при разных длительностях экспозиции
| Варианты опыта | Длительность облучения | ||||
| 0 с | 60 с | 120 с | 240 с | 480 с | |
| Алирин – Б
на томате |
67,0±17,0* | 72,3±20,2 | 27,7±5,3 | 43,3±11,8 | 38,7±5,6 |
| Ризоплан
на томате |
22,3±2,2 | 0 | 0 | 0 | 0 |
| Алирин – Б
на перце |
22,4±10,3 | 22,3±3,4 | 21,3±8,1 | 23,8±7,9 | 13,9±5,1 |
| Ризоплан
на перце |
33,4±3,3 | 16,7±1,7 | 16,7±1,7 | 16,7±1,7 | 27,8±2,8 |
*среднее значение±стандартная ошибка среднего
Рисунок 4.12 – Процент погибших растений томата от альтернариоза
при обработке необлученными и облученными лазером биопрепаратами.
Из сохранившихся экземпляров отмечены растения как с симптомами поражения, так и без них. В вариантах с использованием необлученного и облученного препарата Алирин — Б бессимптомных растений было 36,2% и 48,9% соответственно (рис. 4.13).
Таким образом, было установлено, что Алирин — Б без применения облучения на стадии уже развившихся симптомов болезни оказался неэффективным в борьбе с альтернариозом томата, культивируемого в виде горшечной культуры в условиях пленочной теплицы. Облучение рабочего раствора данного препарата позволило повысить антифунгальную активность бактерии B. subtillis, входящей в его состав и, как следствие, снизить число погибших растений на 25,5%, а также увеличить количество бессимптомных экземпляров на 12,7%.
Рисунок 4.13 – Процент растений томата без симптомов альтернариоза при обработке необлученными и облученными лазером биопрепаратами.
Степень поражения альтернариозом растений томата отразилась на их ростовой активности. На участке, где применялся необлученный рабочий раствор Алирина-Б, высота растений была на уровне контроля и составила в среднем 18,8 см. При использовании облученного препарата высота растений была выше на 47,8% и составила 27,8 см (рис. 4.14).
Ризоплан оказался более эффективным в борьбе с альтернариозом. Его использование дало возможность сохранить 93,6% растений, а применение облученного рабочего раствора позволило вовсе избежать гибели растений томата от A. alternatа. На участках, где применялся облученный и необлученный Ризоплан количество бессимтомных растений было достаточно большим и составило 87,2% и 95,7% соответственно.
Проведенные исследования показали, что БСЗР Ризоплан характеризовался высокой эффективностью в борьбе с A. alternatа, а применение лазерного облучение еще в большей степени стимулировало синтез бактериальных метаболитов фунгицидного действия. В варианте с использованием рабочего раствора препарата погибших растений было меньше на 46,8%, а бессимптомных больше на 51,0% по сравнению с контролем. Его облучение позволило вовсе избежать выпадов растений, а число бессимптомных образцов оказалось выше на 8,5% по сравнению с вариантом без облучения (рис. 4.12; 4.13).
Данное обстоятельство отразилось и на особенностях роста растений на участках с применением Ризоплана. В вариантах с использованием необлученного и облученного рабочего раствора этого препарата средняя высота растений составила 42,9 см и 48,6 см соответственно, что на 116,7% и 145,5% превышает значение данного показателя в контроле (рис. 4. 14).
Проведенные исследования свидетельствуют об эффективности применения лазерного облучения рабочих растворов биопрепаратов в течение 480 с для повышения активности бактерий, входящих в их состав.
Рисунок 4.14 – Влияние необлученных и облученных лазером биопрепаратов на среднюю высоту растений томата.
4.2. Оптимизация статистических (когерентных) параметров облучения растений квазимонохроматическим светом
4.2.1. Эукариоты
Кратковременное воздействие квазимонохроматических световых потоков определённых спектральных диапазонов способно значительно повысить функциональную активность различных живых организмов – от бактерий до человека. Такой эффект получил надёжное экспериментальное подтверждение, но недостаточное научное обоснование. По поводу механизма наблюдаемого явления высказывают противоречивые точки зрения, в зависимости от трактовки полученных данных. Наиболее дискуссионным оказался вопрос о роли когерентности оптического излучения в фоторегуляторных процессах. В целом ряде работ утверждается, что для биологических объектов когерентность света несущественна (Гамалея, 1988; Клебанов, 2006; Zalevsky, 2011; Smith, 2005; Лобко, 1985). Основанием для этого послужил близкий по величине стимуляционный эффект от лазерного излучения, которое названо когерентным, и нелазерного (от тепловых, газоразрядных, люминесцентных источников), которое названо некогерентным. Такие определения нельзя считать корректными, так как у последних для получения сходных с лазерным излучением оптических параметров вырезали спектрально-узкий пучок с помощью монохроматоров и аппертурных диафрагм. В этом случае свет обладал хотя и меньшей, чем у лазеров, но достаточно высокой пространственно-временной когерентностью (Будаговский, 2005). В ряде других работ, также на основании экспериментальных данных, доказывают, что стимуляционный эффект выше у более когерентного света (Березин. 1983; Дубровский, 1982; Зубкова, 1997).
Практически во всех подобных публикациях обращали внимание исключительно на спектральные свойства излучения, например, «широкополосный свет», «узкополосный свет» (Москвин, 2000; Кару, 1983), то есть на временную когерентность. Влияние пространственной когерентности на функционирование живых организмов осталось за пределами обсуждения. Это понятие использовали только при анализе светорассеяния и формирования спекл-структуры в биологических тканях (Hode, 2005; Qadri, 2007). Однако именно пространственная когерентность может служить ключом к пониманию роли статистических свойств света в фоторегуляторных процессах, поскольку она, в отличие от временной, не зависит от спектральной ширины линии .
Для выявления наиболее общих закономерностей фотоиндуцированных реакций в экспериментах использовали живые организмы, различающиеся по своей организации, морфофизиологическим показателям и оптическим характеристикам. Было реализовано три серии опытов. В каждой серии использовали источники излучения, формирующие световые потоки с различной когерентностью, но одинаковыми энергетическими характеристиками (средняя длина волны, плотность мощности, длительность облучения).
В первой серии опытов использовали пыльцу сливы. Перед облучением её наносили на поверхность питательной среды, содержащей 0,8% агара, 15% сахарозы и 0,001% борной кислоты. Облучение проводили в течение 16, 32, 64, 128 и 256 с при плотности мощности 0,7 Вт/м2. После облучения препараты с пыльцой размещали во влажных камерах, где их содержали при температуре +28С в течение 24 часов. Далее пыльцу инактивировали хлороформом и определяли с помощью микроскопа долю проросших пыльцевых зерён. В каждом варианте опыта было по 6 препаратов, на каждом препарате просматривали по 10 полей зрения.
Вторую серию опытов проводили на микрочеренках ежевики. Их культивировали на питательной среде по прописи T. Murashige, F. Skoog (1962), содержащей 1 мг/л 6-бензиламинопурина, 0,1 мг/л ß-индолил-3-масляной кислоты, 1 мг/л гибберелловой кислоты. Перед облучением продолжительность темновой фазы составила 16 часов. Естественная освещённость в зоне облучения составила 1 лк. Длительность облучения 480 с, плотность мощности 0,3 Вт/м2. После облучения колбы с микрочеренками культивировали в течение 50 дней при температуре +22±1оС, продолжительности светового дня 16 часов и освещённости 2000 лк. В каждом варианте опыта использовали по 28 микрочеренков. Учитывали число образовавшихся на каждом черенке побегов (коэффициент размножения) и их длину.
В третьей серии опытов использовали колонии гриба Fusarium microcera. Их культивировали на картофельно-глюкозном агаре, содержащем 1% глюкозы и 1% агара. Облучение проводили через 24 часа после посева мицелия на питательную среду. Длительность облучения 240 с, плотность мощности 1 Вт/м2. Через 6 дней культивирования в темноте при температуре +22±1оС измеряли площадь и толщину колоний и рассчитывали их объём.
В опытах применяли тепловой источник света. Он представлял собой высокотемпературную лампу накаливания с инфракрасным светофильтром. Поток излучения проходил также через один из интерференционных светофильтров, которые имели различные значения ширины спектра пропускания , но одинаковые длины волн в максимуме спектральной полосы (λmax = 6331 нм). Спектры пропускания инфракрасного и интерференционных светофильтров измеряли на спектрофотометре Analytik Jena Specord 250 Plus (Германия) с точностью 0,5 нм и по ним рассчитывали Lcoh теплового источника по формуле Lcoh = (λmax)2 / (Born, 1968), где — ширина спектральной линии на половинной высоте. За светофильтрами в центре пучка устанавливали апертурную диафрагму, определяющую угловые размеры теплового источника света. Такая оптическая схема (рис. 4.15) формировала квазимонохроматическую пространственно-ограниченную волну со сравнительно равномерным распределением интенсивности по фронту. В этом случае модуль нормированной поперечной корреляционной функции поля между двумя точками r1, r2 можно представить как (Будаговский, 2015): (s) = 2J1(kas/z)/(kas/z), гдеJ1(kas/z) ‑ функция Бесселя, k = 2/ ‑ волновое число, 2a – линейная апертура источника, s = r1 ‑ r2, z ‑ удаление от источника излучения до объекта. Первое нулевое значение функция (s) приобретает при kas/z = 3,83, и, соответственно, радиус корреляции в этом случае будет равен rcor =0,61 z/a. Мощность и плотность мощности излучения регистрировали с помощью измерителя лазерного излучения VEGA Ophir (Израиль) и калориметрического измерителя ИМО-2Н («Эталон», Россия). Конкретные статистические параметры облучения даны при описании каждого эксперимента. На графиках и гистограммах указаны средние значения и ошибки среднего.
1
2
3
4
6
5
Z
Рисунок 4.15 – Схема эксперимента с тепловым источником света. 1 – защитный светонепроницаемый кожух, 2- высокотемпературная лампа накаливания, 3 – инфракрасный светофильтр, 4 — красный интерференционный светофильтр, 5 – аппертурная диафрагма c круглым отверстием диаметром 2a, 6 – биологический объект.
Основной задачей исследования было сравнение фоторегуляторного действия квазимонохроматических световых потоков с одинаковыми энергетическими характеристиками, но различной когерентностью. Длина когерентности квазимонохроматического пучка связана с шириной его спектральной линии известным соотношением Lcoh = (max)2/. Поэтому в экспериментах с различными значениями Lcoh нельзя сделать однозначный вывод – спектральные или корреляционные свойства излучения влияют на изменение фотоиндуцированной реакции живых организмов. Чтобы избежать противоречий, статистическую упорядоченность светового потока теплового источника изменяли за счёт пространственной когерентности при сохранении временной. На пыльце сливы (размер пыльцевых зёрен 40-60 мкм) было показано, что при постоянной величине Lcoh = 32 мкм и определённых длительностях облучения стимуляционный эффект был достоверно ( 0,001) выше у пучков с радиусами корреляций 40 мкм, чем 5 мкм (рис. 4.16). Следовательно, пространственная когерентность светового пучка также способна влиять на величину фотоиндуцированной реакции клеток. Сопоставляя максимальные размеры клеток с характеристическими параметрами Lcoh и rcor, был сделан вывод, что наибольшая фотоиндуцированная реакция наблюдается у клеток, полностью помещающихся в объёме когерентности поля (Будаговский, 2005; Конев,1979).
Рисунок 4.16 – Зависимость прорастания пыльцы сливы от длительности облучения квазимонохроматическим светом тепловых источников с одинаковой временной когерентностью (Lcoh = 32 мкм) и различной пространственной когерентностью. 1 – rcor = 40 мкм; 2 – rcor = 5 мкм.
Другой биологической моделью служили экспланты (микрочеренки) ежевики, которые облучали квазимонохроматическим излучением (λmax = 6331 нм) от теплового источника. С помощью интерференционных светофильтров и апертурных диафрагм было сформировано 4 световых потока с одинаковой плотностью мощности, но различными статистическими параметрами. Наибольший стимуляционный эффект зафиксирован в первом варианте опыта (рис. 4.16) при значениях Lcoh = 135 мкм и rcor = 30 мкм. В этом случае практически все клетки (средний размер D = 18 0,3 мкм) помещались в объёме когерентности поля, т.е. Lcoh и rcor D. Однако при такой же длине когерентности, но радиусе корреляции 5 мкм (вариант опыта 2) стимуляционный эффект был достоверно ( 0,05) ниже. Похожую картину наблюдали и при длине когерентности 5 мкм (варианты опыта 3 и 4). Стимуляционный эффект двух световых потоков с радиусами корреляции 30 и 5 мкм различался между собой приблизительно в полтора раза, но был заметно ниже, чем в варианте 1 (рис. 4.17). Вероятно, это обусловлено тем, что клетки лишь частично помещались в объёме когерентности поля.
| Рисунок 4.17 – Влияние квазимонохроматического света различной пространственно-временной когерентности на развитие эксплантов ежевики, культивируемых invitro. 1 – Lcoh = 135 мкм, rcor = 30 мкм; 2 – Lcoh = 135 мкм, rcor = 5 мкм; 3 – Lcoh = 5 мкм, rcor = 30 мкм; 4 – Lcoh = 5 мкм, rcor = 5 мкм; Контроль (без облучения). Длительность облучения 480 с.
Сравнивая коэффициенты стимуляции Kst (отношение значений репрезентативных признаков в опыте и контроле) при различных типах облучения (рис. 4.18) можно сделать вывод, что стимуляционный эффект зависит не от абсолютных значений Lcoh и rcor, а их соотношения с размерами клетки. Чем большая её часть помещается в объёме когерентности поля квазимонохроматического пучка, тем сильнее выражена фотоиндуцированная реакция. При этом неважно, какой из параметров Lcoh или rcor является лимитирующим, т.е. меньше D. |
rcor
Lcoh
D
| Вариант 1 | Вариант 2 | Вариант 3 | Вариант 4 |
| Lcoh = 135 мкм,
rcor =30 мкм |
Lcoh = 135 мкм,
rcor = 5 мкм |
Lcoh = 5 мкм,
rcor = 30 мкм |
Lcoh = 5 мкм,
rcor = 5 мкм |
| D = 18мкм | D = 18мкм | D = 18мкм | D = 18мкм |
| Kst = 2,03 | Kst = 1,35 | Kst = 1,34 | Kst = 1,00 |
| α< 0,001 | α = 0,22 | α = 0,14 | α = 0,99 |
Рисунок 4.18 – Изменение коэффициента стимуляции Kst в культуре растительной ткани в зависимости от соотношения размера клеток D с Lcohиrcor возбуждающего света. Объём когерентности поля представлен в виде прямоугольной проекции со сторонами Lcohи rcor, размер клетки – кругом диаметром D, а статистическая оценка различий с контролем – величиной α (вероятность «0» гипотезы).
Подтверждением служат близкие значения ростовых показателей в вариантах опыта 2 и 3, у которых менялись и длина когерентности и радиус корреляции действующего излучения, но оставалась постоянной доля клетки, попадающая в область корреляции фаз фотонного коллектива.
Реакция гриба Fusarium microcera на облучение красным квазимонохроматическим светом с высокой и низкой когерентностью была такой же, как у растений. Наибольший рост колоний имел место при использовании светового пучка с Lcoh = 135 мкм и rcor = 18 мкм, т.е. когда клетки (средний размер 11 0,5 мкм) полностью помещались в объеме когерентности поля. Изменение радиуса корреляции с 18 до 5 мкм при фиксированном значении длины когерентности 135 мкм, снизило величину фотоиндуцированной реакции клеток гриба (рис. 4.20).
Рисунок 4.19 – Влияние когерентности квазимонохроматического света на развитие колоний гриба Fusarium microcera инфицированных бактерией Pseudomonas syringae. 1 ‑ Lcoh = 135 мкм, rcor = 18 мкм; 2 ‑ Lcoh = 135 мкм, rcor = 5 мкм; контроль (без облучения).
У всех рассмотренных организмов наблюдали повышение функциональной активности после кратковременного воздействия квазимонохроматического излучения. Учитывая его спектральный диапазон, можно говорить о возбуждении фитохромной фоторегуляторной системы(Whitelam, 2007; Kami, 2010). В этом случае акцепторами квантов света выступает семейство фитохромов — белков с хромофорной группой близкой по структуре к фикобилинам. Характерной особенностью таких молекул является способность к цис-транс-изомеризации хромофора. Под действием красного света происходит обратимая фотоконферсия фитохрома в физиологически активную форму, что повышает интенсивность различных внутриклеточных процессов, вплоть до экспрессии генов (Fankhauser, 1997; Девятков, 1987). Дальне красный свет приводит к их торможению. Механизм трансдукции светового сигнала вхимический и его дальнейшие превращения хорошо изучены (Whitelam, 2007; Kami, 2009; Fankhauser, 1997; Девятков, 1987), однако первичные фотофизические процессы рассмотрены не столь глубоко и требуют дальнейших исследований.
Представленные выше результаты показывают, что при анализе фоторегуляторных процессов нельзя ограничиваться оценкой интенсивности, длительности и длины волны действующего света. Необходимо учитывать и его статистические характеристики. Это вытекает из того, что при одинаковых энергетических параметрах, включая и ширину спектральной линии, изменение пространственной когерентности поля существенно влияло на величину фотоиндуцированной реакции различных организмов (рис. 4.16 – 4.19). Отдельные молекулы хромопротеидов не могут различать корреляционные свойства излучения. Следовательно, в клетках должна существовать некоторая надмолекулярная система, выполняющая функции фазового детектора. Наиболее вероятным претендентом является биологическая мембрана, ассоциированная с хромопротеидами. Например, фитохромы образуют белок-мембранные комплексы, которые под действием света изменяют свойства липидного бислоя, в частности его проницаемость (Whitelam, 2007; Kami, 2009). При этом в биомембранах и биополимерах могут протекать кооперативные и когерентные процессы (Fröhlich, 1980; Быховский, 1973; Popp, 1993; Bajpai, 1999). Одним из доказательств служит генерация живыми организмами когерентных фотонов (Popp, 2000; Budagovsky, 1995). Если допустить, что весь мембранный пул клетки принимает участие в оценке статистических свойств излучения, становится понятной установленная ранее закономерность: при прочих равных условиях наибольшую выраженность фоторегуляторные реакции приобретают, когда клетка полностью помещается в объёме когерентности поля (Будаговский, 2005; Конев, 1979; Будаговский, 2015). Размер клетки D можно принять за присущий биологическим организмам порог дискриминации корреляционных свойств излучения, т.е. своеобразную биологическую меру когерентности. В такой модели возбуждение достаточно когерентным (по критерию D) светом увеличивает вероятность кооперативных процессов в биомембранах и приводит к дискретному (триггерному) изменению их регуляторных функций. В пользу этой версии свидетельствует невыполнение дозового закона при кратковременном лазерном облучении растений (Будаговский, 2015). Выраженность фоторегуляторных реакций не зависела от количества поглощённой энергии (дозы), а в значительной степени определялась когерентностью света и его спектральным диапазоном.
4.2.2. Прокариоты
Многие виды нефотосинтезирующих бактерий способны реагировать на свет. Первичными сенсорами у них служат хромопротеиды – специальные белки, включенные в цепи фоторегуляторных реакций: фитохромы, криптохромы, BLUF (BlueLightsensingUsing FAD) и LOV (Light, Oxygen, Voltage) домены. Их хромофорные центры поглощают в ультрафиолетовой и видимой областях спектра. При действии излучения определённых длин волн происходит изменение конформации хромофоров хромопротеидов и запуск химических сигнальных каскадов, управляющих различными метаболическими и эпигенетическими процессами (Rockwell, 2006).
Особый интерес представляет фитохром В (phyB), обладающий свойством обратимой светоиндуцированной транс-цис изомеризации. Красный свет (R) переводит этот белок в состояние Pfr (far-red light absorbing form) характеризующееся наибольшим поглощением в интервале 700 — 750 нм (прямая фотоконверсия). Дальне красный свет (FR) индуцирует обратную изомеризацию хромофора, переводя фитохром в форму Pr (red light absorbing form) со значительной адсорбцией при 600 — 700 нм (обратная фотоконверсия). В темноте происходит спонтанная конверсия phyB в том же направлении: Pfr → Pr, но с меньшей скоростью (Bellini, 2012; Tasler, 2005). На свету концентрация той или иной формы phyB будет определяться соотношением интенсивностей различных длин волн действующего излучения, так как в диапазоне 550 ‑ 750 нм спектры поглощения Pr и Pfr частично перекрываются (Bellini, 2012). Преимущественное накопление Pfr повышает активность различных эндогенных процессов, вплоть до экспрессии генов. Смещение равновесия в сторону Pr приводит к обратному эффекту (Rockwell, 2006). Такой механизм необходим клеткам для координации метаболических функций с периодически изменяющимися световыми характеристиками внешней среды.
При оптимизации параметров облучения основное внимание уделялось энергетическим параметрам. Статистические (когерентные) свойства излучения не привлекли должного внимания, так как многие исследователи полагали, что корреляция фотонов не влияет на величину фотоиндуцированного ответа. Количественную оценку когерентных свойств излучения в биологических экспериментах практически никогда не проводили. Ограничивались только качественным описанием. Излучение лазерных источников называли когерентным, а нелазерных — «широкополосным» или «некогерентным» (Smith, 2005; Drozdov, 2014; Poyedinok, 2015; Karu, 1985). Такой подход нельзя считать корректным, т.к. все электромагнитные поля обладают вполне определённой статистикой с большей или меньшей когерентностью (Goodman, 1985).
Переход от качественных оценок к количественным и установление некоторого биологически обусловленного порога дискриминации статистических свойств излучения позволили обнаружить зависимость фотоиндуцированного ответа как от длины когерентности (Lcoh) так и радиуса корреляции (rcor) действующего светового потока (Budagovsky, 2015; Budagovsky, 2016). Исследования проводили в спектральном диапазоне возбуждения прямой фотоконверсии phyB (630-660 нм). Полученные результаты показали, что переход в состояние Pfr зависит от статистических свойств излучения. Возникает вопрос, наблюдаемый эффект является частным свойством прямой фотоконверсии phyB или же отражает общую закономерность фитохромной регуляции клеток? В последнем случае можно ожидать влияния статистической упорядоченности света на процесс обратной фотоконверсии phyB.
Биологической моделью служил штамм Pseudomonas fluorescens AP-33 (Ps.fl.), клетки которого имеют форму палочек длиной 2-4 мкм. Бактерии сравнительно быстро размножаются и уже через сутки позволяют надёжно регистрировать ответ на световое воздействие. Для культивирования использовали картофельно-глюкозную жидкую питательную среду, которую с помощью микробиологической петли засевали суспензией бактериальных клеток. Биологический материал разливали по стерильным стеклянным флаконам объёмом 30 мл. После 30 минутной выдержки проводили обработку квазимонохроматическим излучением на вращающемся столике через боковую поверхность флаконов. Контрольные (не облучаемые квазимонохроматическим светом) образцы находились при естественной освещённости 400 лк.
Было проведено три взаимосвязанных эксперимента. Задачей первого являлось определение оптимальной длительности облучения, второго — проверка обратимости фотоиндуцированного эффекта и третьего — установление влияния когерентности света на прямую и обратную фотоконверсию phyB. В первых двух опытах источниками квазимонохроматического излучения служили светодиоды, генерирующие на длине волны 660 нм и 740 нм с шириной спектральной линии на половинной высоте контура = 24 нм. В третьем опыте использовали высокотемпературную лампу накаливания с тепловым фильтром. Излучение лампы пропускали через систему интерференционных светофильтров и аппертурных диафрагм (Budagovsky, 2016). Для прямой фотоконверсии использовали фильтры с максимумом пропускания λmax = 633 нм, = 3 нм или = 66 нм. В экспериментах с обратной фотоконверсией применяли фильтры с λmax = 730 нм, = 5 нм или = 52 нм. Спектральные измерения проводили на спектрофотометре AnalytikJenaSpecord 250 Plus (Германия) и спектрометре ASP-150T (Россия) с точностью 0,5 нм и по ним рассчитывали Lcoh теплового источника по формуле Lcoh = λmax2 / (Born, 2013).
За светофильтрами в центре пучка устанавливали круглую апертурную диафрагму, определяющую угловые размеры теплового источника света. Такая оптическая схема формировала квазимонохроматическую пространственно-ограниченную волну со сравнительно равномерным распределением интенсивности по фронту. В этом случае модуль нормированной поперечной корреляционной функции поля между двумя точками r1, r2 можно представить как (Jakeman, 1974): (s) = 2J1(kas/z)/(kas/z), где J1(kas/z) ‑ функция Бесселя, k = 2/ ‑ волновое число, 2a – апертура источника, s = r1 ‑ r2, z ‑ удаление от источника излучения до объекта. Первое нулевое значение функция (s) приобретает при kas/z = 3,83, и, соответственно, радиус корреляции в этом случае будет равен rcor =0,61 z/a. В каждом спектральном диапазоне (R или FR) использовали 2 диафрагмы, апертуры которых различались в 3 раза.
Применение частотных и пространственных фильтров позволило получить от теплового источника квазимонохроматические волны со сравнительно высокой или низкой пространственно-временной когерентностью в области возбуждения Pfr или Pr(таблица 4.2).
Таблица 4.2 −Характеристические показатели когерентности света использованные для прямой и обратной фотоконверсии phyB
| Характеристический
показатель |
Прямая
фотоконверсия,R |
Обратная
фотоконверсия,FR |
||
| Высокая
когерентность |
Низкая
когерентность |
Высокая
когерентность |
Низкая
когерентность |
|
| Lcoh,мкм | 134 | 6 | 107 | 10 |
| rcor, мкм | 15 | 5 | 18 | 6 |
Интенсивность излучения регистрировали измерителем лазерного излучения VEGA Ophir (Израиль) и калориметрического измерителя ИМО-2Н («Эталон», Россия). Во всех экспериментах её устанавливали на уровне 2 Вт/м2 с ошибкой не более 4 %. После облучения, в течение 24 часов бактерии культивировали в шейкере-инкубаторе при температуре 35°С и 140 оборотах в минуту. Подсчет клеток проводили путем микроскопирования с полем зрения площадью 0,06 мм2 (при увеличении ×640). В каждом варианте опыта проведено не менее 54 измерений. На графике и гистограммах указаны средние значения и стандартные ошибки.
Эксперимент 1. Задачей этого эксперимента служило определение оптимальной длительности облучения. Связано это с тем, что ответная реакция клеток на квазимонохроматический красный свет носит нелинейный многомодальный характер с чередующимися во времени максимумами и минимумами стимуляционного эффекта (Budagovsky, 2015). Как оказалось, подобная закономерность характерна и для обратной фотоконверсии phyB (рис. 4.20). У Ps.fl. наибольшее различие между действием красного и дальне красного света наблюдали при 60 секундном облучении с интенсивностью 2 Вт/м2. В последующих экспериментах использовали именно этот режим.
Рисунок 4.20 –Влияние длительности облучения квазимонохроматическим красным или дальнекрасным светом на деление клеток бактерии Ps.fl. в питательной среде.
Эксперимент 2. Важно убедится, что наблюдаемая фотоиндуцированная реакция обладает свойством обратимой фотоконверсии характерным для phyB. Было сделано два варианта опыта. В первом суспензию бактерий облучали красным светом. Это привело к выраженному стимуляционному эффекту (рис. 4.21), характерному для конформационного состояния Pfr. Во втором варианте Ps.fl. подвергали воздействию красного, а через 2 минуты — дальне красного света. В результате скорость деления клеток снизилась почти до исходного (без облучения) уровня. Можно предположить, что произошла конверсия фитохрома в форму Pr, снижающую функциональную активность клеток. Наличие обратимой реакции на красный и дальне красный свет указывает, что в этом спектральном диапазоне у Ps.fl. фоторегуляторные процессы контролируются посредством phyB. Такая биологическая модель может быть использована для исследования влияния когерентности квазимонохроматического света на прямую и обратную фотоконверсию фитохрома.
Рисунок 4.21 –Реакция бактерии Ps.fl на 60 секундное облучение красным (660 нм) светом или последовательное красным и дальне красным (660 нм + 740 нм) светом.
Эксперимент 3. В этом эксперименте бактерий Ps.fl. независимо облучали красным или дальне красным светом. При этом в каждом спектральном диапазоне формировали по два потока излучения с одинаковой интенсивностью, но с различающимися не менее чем в 3 раза характеристическими показателями когерентности Lcoh и rcor (таблица 4.2). Реакция Ps.fl. на квазимонохроматический свет с относительно высокой или низкой когерентностью достоверно различалась.
Кратковременное (60 с) воздействие красного высоко когерентного света в 2 раза увеличило число клеток в сравнении с вариантом без облучения. Это может говорить о значительном увеличении концентрации формы Pfr. В варианте с низкой когерентностью число клеток возросло только на 18 % (рис. 4.22), что указывает на существенно меньшую скорость конверсии фитохрома Pr→ Pfr.
Реакция на дальне красный свет также зависела от его когерентности. При высокой корреляции фотонов обратная фотоконверсия фитохрома проходила значительно эффективнее, чем при низкой и привела к достоверному снижению скорости деления клеток за счёт накопления формы Pr (рис. 4.17).
Рисунок 4.22 –Влияние когерентности света на прямую и обратную фотоконверсию фитохрома В у бактерии Ps.fl. ВК – высокая когерентность, НК – низкая когерентность (табл.).
Результаты эксперимента показывают, что корреляция фотонов влияет как на прямую, так и обратную фотоконверсию phyB. Различия биологического действия высоко и низко когерентного света в красной и дальне красной областях спектра существенны и составляют 101 и 36%, соответственно. Дисперсионный анализ подтверждает надёжность этого вывода на уровне P 0,001.
Ранее для растительных организмов было показано, что наибольший фотоиндуцированный ответ имел место, когда средний размер клеток D < Lcoh, rcor(Budagovsky, 2015;Budagovsky, 2016). При этом rcor рассчитывали исходя из условия kas/z = 3,83, что соответствует (s) = 0. Такой радиус корреляции устанавливает границу полной потери когерентности. Для сравнительно крупных клеток растений (D ~ 20 – 40 мкм) подобный подход оказался оправданным, т.к. достаточное количество внутриклеточных элементов попадало в область с более высокой корреляцией фотонов, где (s) 0. В нашем случае опыт показал, что для мелких, не имеющих ядер клеток бактерий (D ~ 2 – 4 мкм), необходимо внести определённые коррективы. Связано это с тем, что phyB является транскрипционным фактором и выполняет фоторегуляторные функции, взаимодействуя с промоторами генов. У эукариот генетический материал сконцентрирован в ядре, которое существенно (в разы) меньше самой клетки. У прокариот (безъядерные клетки), в том числе и бактерии Ps.fl., наследственный аппарат представляет собой спирализованную кольцевую молекулу ДНК, занимающую значительную часть клетки. Вероятно, именно в этом пространстве необходимо создать высокую корреляцию фаз возбуждающих Ps.fl. световых волн.
В проведенном эксперименте характеристические показатели (таблица 4.2) превосходили размер клеток Ps.fl. как при высокой, так и низкой когерентности света и в этих вариантах опыта можно было ожидать похожий биологический ответ. Но он существенно различался (рис.4.17). Можно предположить, что дляпрокариот необходимы более жёсткие критерии когерентности. Так, например, радиус корреляции следует рассчитывать не на уровне (s) = 0, а на уровне, который соответствует аргументу функции Бесселя kas/z = 1. Тогда r*cor = 0,16 z/a будет охватывать только область с высокой корреляцией фотонов(Born, 2013). Новый критерий r*cor, который в 3,8 раза меньше rcor, превосходил размеры клеток Ps.f только в вариантах опыта со сравнительно высокой когерентностью и только в этих вариантах наблюдали заметное влияние квазимонохроматического света. Вероятно, для клеток бактерий необходимо, чтобы весь их объём находился в области высоких корреляций фотонов. Такой подход устранил возникшее противоречие.
Показанная зависимость обратной фотоконверсии phyB: Pfr →Pr от когерентности света согласуется с полученными ранее данными по влиянию статистических свойств излучения на прямую фотоконверсию phyB у клеток бактерий, грибов и растений (Budagovsky, 2015; Budagovsky, 2016), что свидетельствует о биологической общности наблюдаемого явления. В этих работах также сравнивались биологические реакции различных организмов, индуцированные световыми пучками с разными радиусами корреляции и одинаковой длиной когерентности, т.е. одинаковым спектральным составом. Например, при постоянной плотности мощности излучения и длине когерентности уменьшение радиуса корреляции с 30 до 5 мкм изменило биологическую реакцию более чем в 1,6 раза (Budagovsky, 2016), что указывает на влияние именно корреляционных характеристик излучения. В настоящей работе, с учётом полученных ранее результатов, использовали световые пучки с высокой или низкой пространственно-временной когерентностью, которые также вызвали математически достоверные различия в реакции клеток.
Обнаруженный эффект заставляет шире рассматривать фотофизическую фазу фоторегуляторных процессов, не ограничиваясь поглощением фотонов хромофорными центрами белков. Наряду с оптическим возбуждением хромопротеидов должен работать некий кооперативный механизм, сходный по функциям с фазовым детектором. Он способен различать корреляцию фотонов и реагировать на неё изменением скорости фотоконверсии фитохрома. Как показал проведенный эксперимент, такой механизм может одинаково успешно работать как в красной, так и дальне красной областях спектра, приводя к большему накоплению Pfr или Pr форм при достаточной когерентности действующего излучения.
Полученные результаты могут служить переходным звеном от классических представлений фотобиологии, не затрагивающих корреляцию фотонов, к процессам квантовой когерентности в биологических системах. Это направление, начатое H. Fröhlich ещё в семидесятые годы прошлого века, стало активно развиваться в последнее десятилетие. Обсуждается роль когерентности в селективной проницаемости ионных каналов и во взаимодействии бактериальных клеток посредством колебаний мембранного потенциала (Majumdar, 2017; Sarangam, 2015). Разрабатывается теория когерентности в реакциях переноса электронов (Scholes, 2018), в том числе и при фотосинтетическом преобразовании энергии (Meneghin, 2018; Roscioli, 2017). Особый интерес с позиций рассматриваемого вопроса представляет участие когерентных экситонов в переносе возбуждённых состояний в светособирающих структурах. В таких случаях делокализация и скорость передачи энергии значительно возрастают (Scholes, 2017). У бактерий основной хромофорной единицей является биливердин, который ковалентно связан с белковой молекулой phyB. Свет красной или дальнекрасной областей спектра вызывает изомеризацию биливердина, приводя к образованию Pfr или Pr форм и запуску химических сигнальных каскадов. Этот процесс происходит сравнительно медленно, через ряд промежуточных состояний (Tasler, 2005;Toh, 2010). Вероятно, образование когерентных экситонов может привести к увеличению скорости трансдукции оптического сигнала и активизации светорегулируемых биохимических процессов.
Проведенные исследования показали, что статистические свойства света играют важную роль в фоторегуляторных процессах как про- так и эукориотических клеток. Следовательно, не любой источник света может использоваться для стимуляции жизнедеятельности тепличных растений. Необходимы такие, которые позволяют формировать оптические потоки с достаточно высокой пространственно-временной когерентностью. Эти два показателя являются существенными показателями рабочего органа технологий агрофотоники.
Обоснование максимальной ширины спектральной линии
квазимонохроматического излучения для фотоиндуцированной
стимуляции клеток
Выше было показано, что величина фотостимуляционного эффекта зависит от статистической упорядоченности (когерентности) действующего излучения. Функциональная активность в наибольшей степени повышается у клеток, полностью помещающихся в объёме когерентности поляVk. Он представляет собой часть пространства, в котором сохраняется корреляция фаз фотонного коллектива. Теорема Винера-Хинчина позволяет получить необходимые для расчёта Vk соотношения: k 1 и rk 0, где k и rk ‑ время когерентности и радиус корреляции светового пучка (характеристические значения аргументов функции когерентности); и ‑ ширина временного и пространственного спектров излучения, 0 — эффективная длина волны. (Соотношения определены с точностью до постоянных коэффициентов, которые зависят от типа спектральных распределений).
Так как в фотобиологических экспериментах выполняются условия факторизации поля, то величина радиуса корреляции не зависит от времени когерентности. Следовательно, пространственную и временную когерентности допустимо рассматривать независимо. В этом случае Vk может быть представлен произведением площади когерентности Ak = rk2 (0 /)2 на длину когерентности Lk = wk 02/, где ‑ интервал длин волн, соответствующий частотному интервалу , w ‑ скорость света в среде распространения волн.
Можно полагать, что пространственно-временная когерентность света определяет область кооперативной перестройки биомембран. Первичными преобразователями в этом процессе выступают ассоциированные с липидным бислоем хромопротеиды. От синхронизации их конформационных состояний будет зависеть концентрация регуляторных метаболитов в цитоплазме клетки и, соответственно, её функциональная активность. Исходя из этого, так называемая «биологическая мера когерентности» электромагнитного поля, может быть представлена неравенством Lk, rk D.
Данный формализм использован для определения спектральной ширины квазимонохроматического света, обладающего наибольшим стимуляционным действием. Главным фоторегуляторным хромопротеидом растительных клеток является фитохром. Его транс-изомерный переход в физиологически активную форму происходит в диапазоне длин волн излучения 600…690 нм. Биологической мере когерентности для этого участка спектра соответствует квазимонохроматический свет с шириной спектральной линии менее 25 нм[1]. Указанным условиям в наибольшей степени отвечают газовые, твёрдотельные и полупроводниковые лазеры, генерирующие в красной области спектра. В отдельных случаях могут применяться и светодиоды. Тепловые и газоразрядные лампы использовать нецелесообразно из-за несущественной когерентности их излучения и низкого светового кпд.
5. ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНЫХ ДОЗ ВНЕСЕНИЯ АКТИВИРОВАННЫХ ЛАЗЕРОМ БИОПРЕПАРАТОВ В УСЛОВИЯХ ЗАЩИЩЕННОГО ГРУНТА
Подбор правильной концентрации и расхода рабочего раствора защитных препаратов как химических, так и биологических имеет большое значение. Важно от применения каких-либо средств получить максимальный результат при минимальных затратах, что обеспечивает экономическую выгоду используемой технологии. Как правило, снижение расхода рабочего раствора препарата приводит к уменьшению эффективности обработок. Для устранения данного негативного последствия часто прибегают к различным методам.
С этой целью разрабатывают и используют эффективные опрыскиватели и оборудование, отвечающее за качество диспергирования рабочего раствора. По мере роста растений с увеличением вегетативной массы и при ее экранировании увеличивается вероятность ухудшения проникновения раствора, наблюдается недостаточная плотность покрытия и степень его отложения. Как выход из ситуации для увеличения эффективности защитных мероприятий необходимо либо увеличивать расход препарата, либо уменьшить размер капель, использовать технологичные распылители (Никитин, 2016; Лысов, 2017; Качественное внесение средств …, 2019).
Так же повысить антифунгальный эффект позволяет добавление различных веществ в состав баковых смесей (Петров, 2009) и применение средств изменяющих качество используемой воды (Валитов, 2015; Никитин, 2016) и др.
Одним из перспективных методов снижения количества используемого препарата является повышение его активности. В случае с биопрепаратами это стимуляция биоагентов (бактерий и грибов), входящих в их состав. Экономически выгодно и экологически целесообразно для этой цели применять лазерное излучение (Maslova, 2019). Это позволит снизить количество используемого препарата для приготовления рабочего раствора, а вместе с этим и затраты на проведение защитных мероприятий.
В связи с тем, что лазерное облучение способно стимулировать активность биопрепаратов, за счет повышения числа клеток биоагентов, а также их антифунгальных свойств целесообразно обработке когерентным светом подвергать рабочие растворы БСЗР со сниженной концентрацией. Это позволит достичь результатов, сходных с эффектом от применения данных средств с концентрацией рекомендуемой производителем без применения лазерного облучения.
5.1. Зараженность семян пшеницы альтернариозом при использовании облученного лазером Алирина – Б с разной концентрацией
Важной задачей является определение пороговой концентрации рабочего раствора биопрепарата с ослабленным антифунгальным эффектом, который можно повысить посредством применения лазерного облучения. Для этого семена пшеницы обрабатывали в суспензии препарата Алирин – Б с различными концентрациями и выявляли и эффективность в борьбе с зараженностью грибом Alternaria.
Подбор концентраций биопрепарата Алирин-Б эффективных против гриба Alternaria проводили на семенах пшеницы. Готовили рабочие растворы препарата в концентрациях 0,125 г/л, 0,25 г/л, 0,5 г/л, 1 г/л, 2 г/л, в которых семена пшеницы замачивали на 5 ч. После чего их переносили в чашки Петри на влажную фильтровальную бумагу. Контролем служили семена, замоченные в воде. Через 3 дня проводили оценку зараженности семян грибом Alternaria.
Также с использованием семян пшеницы проводили оценку влияния лазерного облучения на эффективность биопрепарата Алирин-Б с пониженной концентрацией в борьбе с Alternaria. Были приготовлены рабочие растворы препарата в концентрации 0,25 г/л и 0,5 г/л. Их облучение проводили на полупроводниковом лазере с длиной волны 661 нм и плотностью мощности 2,5 Вт/м2 в течение 480 с (рис. 5.1). Семена пшеницы замачивали в биопрепарате на 5 ч. После чего их переносили во влажные камеры в чашки Петри. Контролем служили семена, замоченные в воде. Через 3 суток проводили оценку зараженности семян.
По результатам исследований варианты опыта разделились на две группы (рис. 5.2). Близкими к контрольному значению (замачивание семян в воде) оказались данные, полученные при использовании рабочих растворов в концентрации 0,125 и 0,25 г/л, средний процент семян пшеницы зараженных грибом Alternaria колебался в пределах ошибки среднего значения от 22% до 24%.
Рисунок 5.1 –Процесс облучения рабочего раствора биопрепарата
полупроводниковым лазером на вращающейся платформе.
В другую группу вошли варианты эксперимента, где были применены рабочие растворы препарата с концентрациями 0,5 г/л (рекомендуемая производителем), 1,0 г/л и 2,0 г/л. При этом зараженность семян колебалась в пределах от 18,0% до 19,0% и в среднем была равна 18,3%.
Проведенный эксперимент позволяет сделать вывод о том, что рабочие растворы Алирина – Б ниже концентрации рекомендованной производителем в 2 и 4 раза следует подвергать лазерному облучению для стимуляции их фунгицидных свойств, что обеспечит экономию препарата.
Повышение активности рабочего раствора с концентрацией рекомендуемой производителем с помощью лазера нецелесообразно, так как увеличение количества клеток биоагента в 2 и 4 раза не дало значительных изменений фунгицидной активности применяемых суспензий.
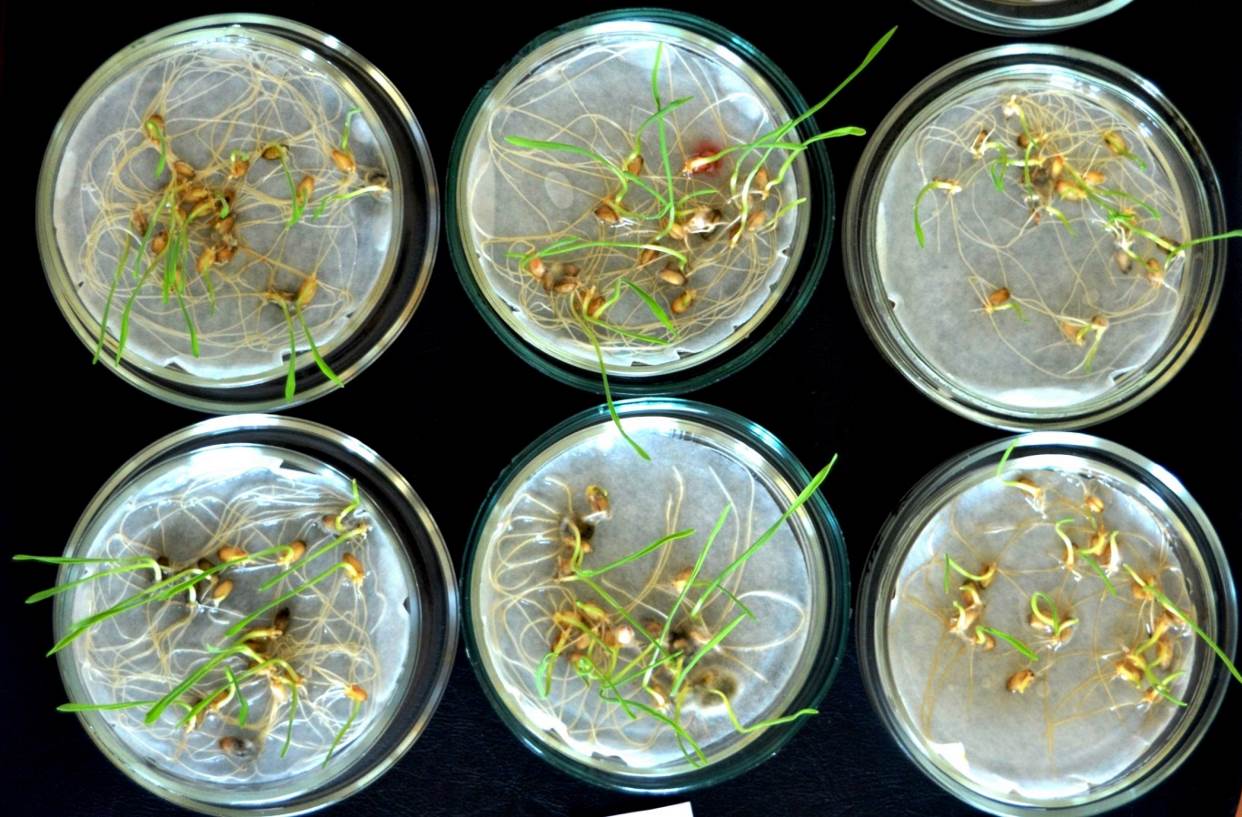 |
||
| вода | Алирин – Б (0,25 г/л) | Алирин – Б (0,5 г/л) |
Рисунок 5.2 –Влияние концентрации рабочего раствора Алирина – Б
на зараженность семян пшеницы грибом Alternaria.
С целью изучения влияния лазерного облучения на фунгицидные свойства рабочих растворов биопрепаратов со сниженной концентрацией был взят Алирина — Б (0,25 г/л). Его обработка когерентным светом в течение 480 с позволила повысить число бактериальных клеток через 2 часа более чем в два раза с 6,2×105 КОЕ/мл до 13,5×105 КОЕ/мл, что приблизило данный показатель к значению, характерному для рабочего раствора исследуемого препарата в концентрации 0,5 г/л (16,9×105 КОЕ/мл). Различия между вариантами 0,25 г/л + лазер и 0,5 г/л были в пределах ошибки среднего значения (рис. 5.3).
Рисунок 5.3 – Влияние лазерного облучения на число бактериальных клеток
в рабочем растворе Алирина – Б со сниженной концентрацией.
Лазерная стимуляция накопления клеток биоагента привела к повышению антифунгальной активности используемого рабочего раствора и снижению зараженности семян грибом Alternaria в результате замачивания в облученной суспензии на 30,6% (рис. 5.4). При том по зараженности между вариантами 0,25 г/л + лазер и 0,5 г/л наблюдались различия в пределах ошибки среднего значения.
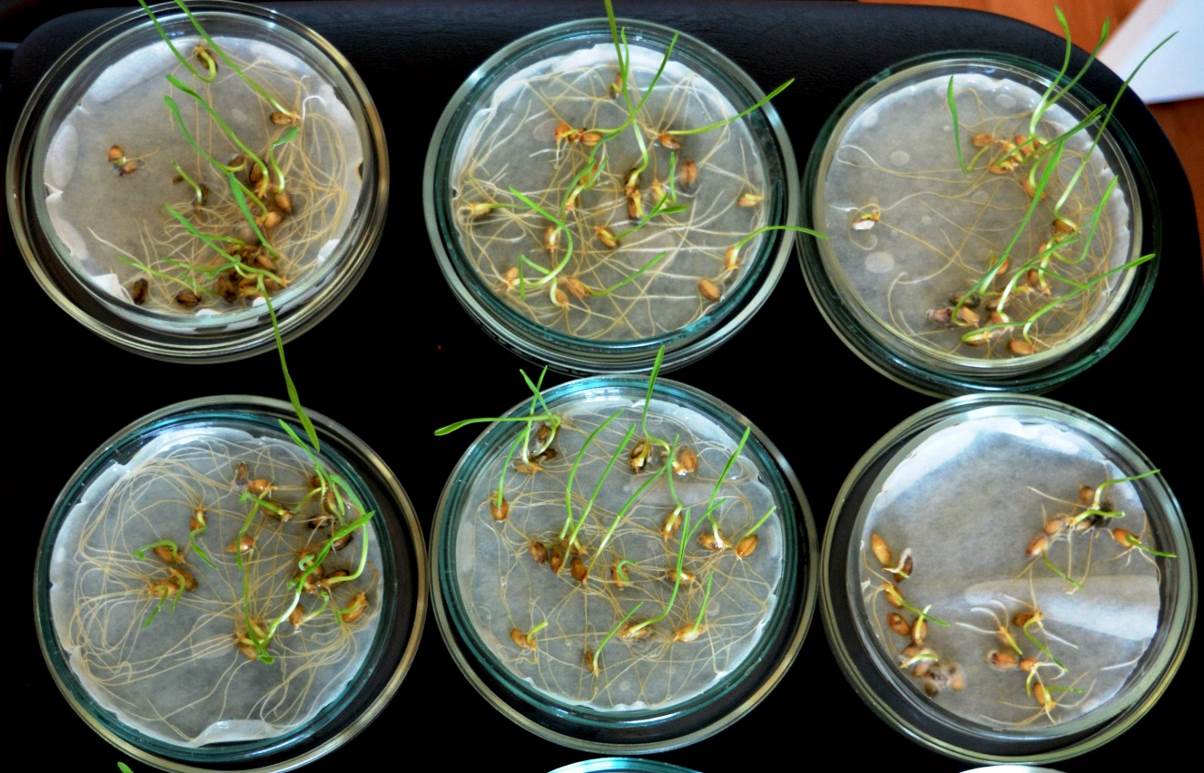 |
||
| Алирин – Б (0,25 г/л) | Алирин – Б (0,25 г/л)+ лазер | Алирин – Б (0,5 г/л) |
Рисунок 5.4 –Влияние лазерного облучения рабочего раствора Алирина – Б со сниженной концентрацией на зараженность семян пшеницы грибом Alternaria.
Таким образом, для борьбы с альтернариозом сельскохозяйственных культур рекомендуется использовать биологический препарат Алирина — Б в концентрации 0,25 г/л, который предварительно следует подвергнуть облучению когерентным светом. Это позволяет через 2 часа после облучения вдвое повысить концентрацию бактериальных клеток в рабочем растворе, что значительно увеличивает его антифунгальную активность. Поэтому облученная суспензия препарата с концентрацией 0,25 г/л имеет эффект идентичный суспензии с концентрацией рекомендуемой производителем (0,5 г/л) без лазерной стимуляции. Данное обстоятельство явилось основанием для изучения эффективности в борьбе с грибными патогенами БСЗР со сниженной концентрацией, обработанных когерентным светом.
5.2. Влияние облученных лазером биопрепаратов Алирин — Б и Ризоплан со сниженной концентрацией на состояние проростков томата,зараженных альтернариозом
Заражение патогенными микроорганизмами семян негативно сказывается на состоянии, образовавшихся из них проростков. У них нарушается рост и развитие, отмечаются хлороз и некроз тканей, а также ряд патологических изменений вплоть до полной гибели. Обработка биопрепаратами семян положительно влияет на состояние образовавшихся проростков. Облученные лазером биоагенты, входящие в состав БСЗР, отличаются более активным функциональным состоянием, что дает возможность повышать эффективность защитных мероприятий с их использованием при сокращении концентрации активных компонентов.
Важной задачей является изучение влияния облученных лазером рабочих растворов биопрепаратов со сниженной концентрацией на состояние проростков растений, зараженных патогенами. Для проведения таких исследований в качестве модельных объектов были выбраны семена томата, зараженные альтернариозом, которые впоследствии обрабатывали биопрепаратами Алирин – Б и Ризоплан.
Семена томата заражали замачиванием их в суспензии спор A. alternata, которая содержала 50-60 клеток гриба в поле зрения микроскопа при увеличении × 640. Затем их высевали в чашки Петри в кокосовый субстрат по 15 штук семян в пятикратной повторности.
Рабочие растворы биопрепарата Алирин — Б готовили согласно рекомендации производителя (0,5 г/л), а также в концентрации 0,25 г/л. Их вносили в грунт. Облучение проводили на полупроводниковом лазере с длиной волны 660 нм и плотностью мощности 2,5 Вт/м2в течение 480 с.
Варианты опыта:
- A. alternata;
- A. alternata + Алирин — Б 0,25 г/л;
- A. alternata + Алирин — Б 0,25 г/л + лазер;
- A. alternata + Алирин- Б 0,5г/л.
Биопрепарат Ризоплан брали в концентрации 1% (согласно рекомендации производителя), а также в концентрации 0,5%. Облучение проводили полупроводниковым лазером с длиной волны 660 нм и плотностью мощности 2,5 Вт/м2.
Варианты опыта:
- A. alternata;
- A. alternata + Ризоплан 0,5 %;
- A. alternata + Ризоплан 0,5 % + лазер;
- A. alternata + Ризоплан 1%.
Обработанные лазером биопрепараты вносили в субстрат с момента прорастания семян. Об эффективности облученных БСЗР судили по длине проростков, образовавшихся из зараженных семян.
Применение рабочего раствора Алирина-Б со сниженной концентрацией после обработки когерентным светом способствовало увеличению длины проростков томата с 18,2 мм (контрольное значение) до 22,3 мм, т.е на 22,9%. При использовании суспензии биопрепарата с той же концентрацией без облучения данный показатель составил 20,0 мм, что на 10,4% было выше контроля. А рабочий раствор, приготовленный по рекомендации производителя, позволил увеличить длину проростков до 21,7 мм (19,7% от контроля) (таблица 5.1; рис. 5.5).
Таблица 5.1 − Длина проростков томата, полученных из семян зараженных грибом A. alternata, после обработки облученными и необлученными рабочими растворами Алирина – Б с разной концентрацией
| Варианты опыта | контроль (вода) | БП 0,25 г/л | БП 0,25 г/л +лазер | БП 0,5 г/л |
| Длина проростков
(в мм) |
18,2±1,85* | 20,0±2,97 | 22,3±1,95 | 21,7±2,15 |
| Длина проростков
(в % от контроля) |
— | 10,4±1,54 | 22,9±1,98 | 19,7±1,95 |
*среднее значение ± стандартная ошибка среднего
Рисунок 5.5 –Влияние необлученных и облученных лазером рабочих
растворов Алирина — Б с разной концентрацией на состояние проростков
томата, зараженных альтернариозом.
Таким образом, эффективность облученного когерентным светом препарата со сниженной концентрацией оказалась выше, чем у аналогичного рабочего раствора без применения лазера и суспензии, приготовленной по рекомендации производителя.
Облучение когерентным светом рабочего раствора Ризоплана со сниженной концентрацией дало увеличение длины проростков до 24,8 мм, что на 18,5% выше контроля (20,9 мм), а также превышало данный показатель во всех вариантах опыта. При использовании суспензии без обработки лазером с содержанием биопрепарата 0,5% длина проростков была равна 22,9 мм (на 9,5% выше контроля), 1,0% рабочий раствор способствовал её увеличению до 23,5 мм (на 12% выше контроля) (таблица 5.2; рис. 5.6).
Рисунок 5.6 –Влияние необлученных и облученных лазером рабочих
растворов Ризоплана с разной концентрацией на состояние проростков
томата, зараженных альтернариозом.
Таблица 5.2 − Длина проростков томата, полученных из семян зараженных грибом A. alternata, после обработки облученными и необлученными рабочими растворами Ризоплана с разной концентрацией
| Варианты опыта | контроль
(вода) |
БП 0,5 % | БП 0,5 % +лазер | БП1,0% |
| Длина проростков
(в мм) |
20,9±1,96* | 22,9±2,26 | 24,8±2,17 | 23,5±2,34 |
| Длина проростков
(в % от контроля) |
— | 9,5±0,93 | 18,5±1,62 | 12,0±0,21 |
*среднее значение ± стандартная ошибка среднего
5.3. Влияние облученных лазером биопрепаратов Алирин — Б и Ризоплан со сниженной концентрацией на зараженность листьев томата альтернариозом
Для определения эффективности активированных лазером биопрепаратов Алирин — Б и Ризоплан их рабочие растворы с разной концентрацией использовали для обработки поверхности листьев томата в условиях влажной камеры.
Варианты опыта с Алирином — Б:
1) контроль (вода),
2) Алирин – Б 0,25 г/л;
3) Алирин – Б 0,25 г/л +лазер;
4)Алирин — Б 0,5 г/л.
Варианты опыта с Ризопланом:
1) контроль (вода);
2) Ризоплан 0,5 %;
3) Ризоплан 0,5 % + лазер;
4) Ризоплан 1%.
Инкубировали листья в течение 2-х суток. После делали смывы с 3 фрагментов листовой пластинки площадью 1 см2 и помещали в пробирки с 10 мл стерильной воды, которые переносили в шейкер инкубатор и встряхивали при 200 об./мин. в течение 40 мин. Полученные смывы высевали по 100 мкл на среду КГА с антибиотиком в чашки Петри.
Облучение проводили на полупроводниковом лазере с длиной волны 660 нм и плотностью мощности 2,5 Вт/м2в течение 480с.
На 5-е сутки проводили учет и идентификацию образовавшихся колоний микроорганизмов, высчитывали число КОЕ гриба A. alternataна 1 см2 поверхности листа.
При микробиологическом анализе поверхностей листьев томата установлено, что их обсемененность при обработке биопрепаратами после лазерного облучения снижается по сравнению с вариантом без применения когерентного света и приближается к значению числа КОЕ исследуемого гриба на 1 см 2 листьев, где использовался рабочий раствор препарата с концентрацией вдвое выше.
Так, на листьях томата, обработанных необлученным рабочим раствором Алирина – Б со сниженной концентрацией (0,25 г/л) было выявлено в среднем 67 КОЕ гриба A. alternata на 1 см2, что на 40,1% ниже, чем в контроле (111,7 КОЕ/см2). Использование лазерного облучения позволило еще снизить данный показатель до 45,5 КОЕ/см2 (на 59,3% ниже контроля) и приблизить его к значению обсемененности листьев в варианте с применением суспензии Алирин – Б с концентрацией выше в 2 раза (39 КОЕ/см2, на 65,1% ниже контроля).
В эксперименте, где использовался Ризоплан, рабочий раствор со сниженной концентрацией оказался неэффективным в борьбе с A. alternata, на что указывает показатель обсемененности равный по значению контролю (22,3 КОК/см2 ). При обработке такой же суспензии лазером отмечалось полное подавление развитие патогенного гриба, как и в варианте с применением рабочего раствора с концентрацией вдвое выше.
Рисунок 5.7 – Влияние необлученных и облученных лазером рабочих растворов Алирина — Б с разной концентрацией обсемененность поверхности листьев томата грибом A. alternata.
Таблица 5.3 − Обсемененность поверхности листьев томата грибом
A. alternata при обработке облученными и необлученными рабочими
растворами Алирина – Б с разной концентрацией
| Варианты
опыта |
контроль (вода) | БП 0,25 г/л | БП 0,25 г/л +лазер | БП 0,5 г/л |
| число КОЕ
гриба на 1 см2 |
111,7±14,7 | 67,0±17,0 | 45,5±10,7 | 39,0±12,7 |
| в процентах от контрольного значения | — | 59,9±15,2 | 40,7±9,57 | 34,9±11,36 |
*среднее значение ± стандартная ошибка среднего
Рисунок 5.8 –Влияние необлученных и облученных лазером рабочих растворов Ризоплана с разной концентрацией обсемененность поверхности листьев томата грибом A. alternata.
Таблица 5.4 − Обсемененность поверхности листьев томата
грибом A. alternataпри обработке облученными и необлученными рабочими
растворами Ризоплана с разной концентрацией
| Варианты
опыта |
контроль
(вода) |
БП 0,5 % | БП 0,5 % +лазер | БП1,0% |
| число КОЕ
гриба на 1 см2 |
22,3±12,7* | 22,3±11,1 | 0 | 0 |
*среднее значение ± стандартная ошибка среднего
В связи со сказанным, фунгицидная активность в отношении патогенного гриба A. alternata у облученных рабочих растворов Алирин – Б и Ризоплан со сниженной вдвое концентрацией сходна с вариантами эксперимента, где использовался рабочий раствор биопрепарата, приготовленный по рекомендации производителя, но без применения обработки когерентным светом.
ЗАКЛЮЧЕНИЕ
Анализ научных, патентных и коммерческих источников информации показал, что за рубежом успешно разрабатываются и внедряются специальные роботы для тепличных хозяйств. Их используют для посева семян, прививки растений, защиты возделываемых культур от болезней, полива и внесения удобрений, оценки зрелости плодов, их сбора и сортировки по качеству. Для защищённого грунта в России пока созданы только отдельные образцы робототехнических устройств. Ряд факторов ограничивает их применение:
- Высокая стоимость для отечественного потребителя.
- Низкая скорость проведения ряда технологических операций.
- Отсутствие квалифицированных кадров для установки, эксплуатации и ремонта роботов.
- Недостаточная компетентность и психологическая инертность руководителей сельхозпредприятий для использования сложной современной техники.
В научно-исследовательской проблемной лаборатории «Биофотоника» ФГБОУ ВО Мичуринский ГАУ разработана роботизированная платформа для интегрированной защиты овощных растений защищённого грунта от болезней в рамках органического земледелия. При её конструировании использовали три полученных патента, опыт применения средств и методов биофотоники в растениеводстве, результаты испытания макетных образцов в лабораторных условиях и производственной теплице.
Экологически безопасная защита тепличных растений от болезней достигается за счёт периодической обработки растений низкоинтенсивным лазерным излучением и мелкодисперсным распылением защитных биопрепаратов на основе живых бактерий, активированных когерентным светом. Подобные устройства отсутствуют в отечественной и зарубежной практике.
Платформа полностью автономна, имеет встроенный аккумулятор, электропривод, обеспечивающий движение по труборельсам и бортовой компьютер. Отдельный микроконтроллер в реальном масштабе времени проводит измерения температуры, влажности, освещённости и концентрации углекислого газа. Эти данные поступают в компьютер, анализируются специально разработанной программой, которая по определённому алгоритму принимает решение (интеллектуальная функция) на выполнение тех или иных технологических операций . Имеются также сенсоры препятствия движению, что исключает наезд на персонал теплицы и вспомогательное оборудование. Для создания оптимальных условий облучения блок с лазерными модулями автоматически поднимается со скоростью роста тепличных растений (2-3 см в сутки). Применённые технические решения защищены тремя патентами РФ.
Разработанная роботизированная платформа имеет два рабочих органа: когерентное оптическое излучение и суспензия бактерий с антифунгальными свойствами. Проведенные исследования показали, что в качестве источника излучения целесообразно использовать лазеры, генерирующие в красной области спектра. Такое излучение вызывает фотоконверсию фитохрома в активную форму. Особое внимание уделено анализу статистических свойств квазимонохроматического света. Показано, что биологический эффект зависит как от пространственной, так и временной когерентности поля. Установлен критерий достаточности корреляционных свойств излучения: радиус корреляции и длина когерентности световых волн должны превосходить характеристический размер клеток облучаемых организмов.
Установлено, что для стимуляции биологических процессов длительность облучения должна быть не менее 5 с, что достигается выбором ширины светового пучка и скорости его перемещения.
Лазерное облучение позволяет повысить активность другого рабочего органа, суспензий бактерий из защитных биопреператов, за счет большей скорости роста клеток биоагентов, а также увеличения их антифунгальных свойств. Целесообразно подвергать обработке когерентным светом рабочие растворы БСЗР со сниженной концентрацией. Это позволяет достичь результатов, сходных с эффектом от применения данных средств по стандартной методике и обеспечит значительную экономию препаратов.
Список использованных источников
Приложения