
Титульный лист и исполнители
РЕФЕРАТ
Отчет 209 с., 1 кн., 114 рис., 5 табл., 52 источн., 2 прил.
МЕЛИОРАЦИЯ, ОРОШЕНИЕ, АГРОРОБОТ, РОБОТИЗИРОВАННЫЙ ОРОСИТЕЛЬНЫЙ КОМПЛЕКС, ВЫСОКИЕ УРОЖАИ, ВЫСОКОПРОДУКТИВНОЕ СЕЛЬСКОЕ ХОЗЯЙСТВО, АВТОМАТИЗАЦИЯ, ДОЖДЕВАЛЬНАЯ МАШИНА, УПРАВЛЕНИЕ ОРОШЕНИЕМ
В отчете дается краткое обоснование необходимости разработки роботизированного оросительного комплекса с интеллектуальной системой управления, так как существующие дождевальные машины не в полной мере удовлетворяют требованиям сельскохозяйственного производства. Очевидна необходимость нового подхода к ведению сельского хозяйства. Перспективными направлениями развития являются «точное земледелие», роботизация и автоматизация производственных процессов, а также использование альтернативных источников энергии в сельскохозяйственном производстве. Необходимо уменьшение влияния «человеческого фактора», максимально эффективное использование сельскохозяйственной техники, оптимизация применения удобрений, ядохимикатов, полива, а также повышение урожайности сельскохозяйственных культур при минимальном вложении капитала и воздействия на окружающую среду.
Повышения качества полива может быть обеспечено путем изменения поливной нормы в соответствии с уровнем влагозапасов участков поля в режиме реального времени, адаптации режима полива к изменяющимся в течение поливного периода условиям, что требует совершенствования системы управления агрегатами, расширения их технологических возможностей, внедрения информационных технологий.
Российский рынок цифровых технологий в сельском хозяйстве мало развит, отличается незначительным выбором, ограниченными возможностями и отсутствием комплексных решений и внедренных в хозяйствах комплексных технологий повышения продуктивности сельскохозяйственных земель на основе применения автоматизации, роботизации, а так же использовании альтернативной энергетики в сельскохозяйственном производстве.
Таким образом, актуальными являютсяразработка новых принципов, методических подходов, методов, алгоритмов для перехода к «интеллектуальному», «цифровому» сельскому хозяйству, основанному на применении автоматизированных систем принятия решений, автоматизации и роботизации производства, а так же применение технологий, позволяющих использовать альтернативные источники энергии в рабочих процессах сельскохозяйственной техники; разработка систем управления сельскохозяйственными машинами, обеспечивающих удаленный контроль работы, сбор, обработку и анализ данных о ходе выполнения технологических процессов;вывод на рынок новой научно-технической продукции, отечественного производства, разработанных современных технологий.
В Саратовском государственном аграрном университете им. Н.И. Вавилова (СГАУ) ведутся разработки систем управления сельскохозяйственными машинами, обеспечивающими удаленный контроль работы, сбор, обработку и анализ данных о ходе выполнения технологических процессов, основанных на использовании компьютерных технологий, аппаратно-программного комплекса для ведения точного земледелия.
Кроме того ведется работа в области применение возобновляемых источников энергии при орошении. Данная разработка позволяет использовать солнечную энергию на привода ходового оборудования, а так же для обеспечения работ электронных систем и блоков сельскохозяйственных машин.
В СГАУ был разработан роботизированный оросительный комплекс,система управления которого обеспечивает контроль функционального состояния и управление комплексом дистанционно по сотовой связи.Повышение качества полива обеспечивается путем изменения поливной нормы в соответствии с уровнем влагозапасов участков поля в режиме реального времени, адаптации режима полива к изменяющимся в течение поливного периода условиям.
Точныйполивдождеваниемвзависимости от потребной нормы полива каждогоучасткаполяпозволяет значительно снизитьрасход воды и энергии.
Привод ходового оборудования и работа электронных систем оросительного комплекса осуществляется от блока, состоящего из солнечных панелей и аккумуляторных батарей.
В настоящее время ведутся разработки по оптимизации технологии совмещения процессаполиваивнесенияудобрений ипестицидов, позволяющие сократить затраты на внесение удобрений при помощи специальной техники, а также уменьшить количество проходов сельскохозяйственной техники в поле.
Для исследований характеристик почвы разработанпочвоотборник на базе автомобиля УАЗ-3909. Проанализированы и подобраны датчики и сенсорные устройства.
Расширяется база данных системы управления для различных почвенно-климатических условий и культур.
Основные преимущества роботизированного оросительного комплекса:
— работа на низком давлении – экономия электроэнергии/дизельного топлива;
— мягкий, щадящий растения, полив – отсутствие уплотнения почвы;
— хорошие эксплуатационно-технические показатели;
— низкие энергетические и эксплуатационные расходы;
— современная система автоматического управления, система дистанционного управления, позволяющая контролировать движение машины и параметры орошения;
— применение возобновляемых источников энергии;
— интеллектуально-советующая система управления, принимающая решение по режимам полива в зависимости от поступающих внешних данных.
Оросительный роботизированный комплекс:
— обеспечивает повышение эффективности производства продукции растениеводства на орошаемых землях за счет экономии энергоресурсов, контроля параметров орошения, снижения затрат на обслуживание и ремонт;
— гарантирует простоту ремонта и замены узлов за счет использования надежного оборудования отечественного производства (в т.ч. исключается возможность долгосрочной поставки запчастей и комплектующих из-за рубежа);
— позволяет повысить производительность и качество работы за счет оптимизации системы водоподачи, а так же применения возобновляемых источников энергии при орошении;
— обеспечивает удаленный контроль работы, сбор, обработку и анализ данных о ходе выполнения технологических процессов;
-обеспечивает повышение урожайности сельскохозяйственных культур при экономном расходовании ресурсов (воды, удобрений, агрохимикатов, электроэнергии, человеческого труда), а также снижение экологической нагрузки на природу внедрением энергосберегающей экологически безопасной технологии производства сельхозпродукции;
— имеет безусловное ценовое преимущество по сравнению с зарубежными и отечественными аналогами и обеспечивает снижение стоимость до 30% при сравнимом качестве полива, экологичности и безопасности.
— обеспечивает экономию воды, агрохимикатов и удобрений, точно регулируя нормы в зависимости от заданных координат движения оросительного комплекса по кругу и в зависимости от поступающих данных «онлайн», т.е. метеоданных, показателей датчиков влажности почвы, состояния посевов идр.
ВВЕДЕНИЕ
Обеспечение продовольственной безопасности в современном мире является одной из важнейших задач развития сельского хозяйства. Согласно прогнозам [51], производство продовольствия во всем мире должно увеличиться на 70-100% к 2050 году, чтобы удовлетворить потребности девятимиллиардного населения.
Более 70% сельскохозяйственных угодий РФ расположены в засушливых районах, где стабильные и высокие урожаи возможны лишь при дополнительном к естественным осадкам орошении [39].
Сельское хозяйство Саратовской области также ведется в сложных природно–климатических условиях.Наиболее характерной особенностью климата в Заволжье является недостаточное и резко меняющиеся в отдельные годы увлажнение,и проблема повышения водообеспеченности земель в данном регионе является актуальной.
Борьба за повышение плодородия почв ведется разными способами и бессистемно, что заметно снижает эффективность применяемых технологий. Необходим новый подход к ведению сельского хозяйства.
Необходимо внедрение новых форм управления и уменьшение влияния «человеческого фактора», более эффективного использования сельхозтехники, удобрений, ядохимикатов, сокращения затрат на производство продукции, а также повышение урожайности сельскохозяйственных культур.
Целью такого управления является получение максимальной прибыли при условии оптимизации сельскохозяйственного производства, экономии хозяйственных и природных ресурсов.
По данным Министерства сельского хозяйства Россия занимает 15 место в мире по уровню цифровизации сельского хозяйства, а рынок информационно-компьютерных технологий в отрасли оценивается в 360 млрд., рублей[51].
В настоящее время, в той или иной степени, цифровые технологии в сельском хозяйстве используют около 10 % российских хозяйств[51].
В странах Евросоюзатехнологии точного земледелия применяют около 80% фермеров, в США — 60%[51].
Цифровые технологии и технические средства на их основе практически не развиты в РФ, элементы систем закупаются отдельными производителями, комплексный подход к цифровизации и роботизации производства сельхозпродукции отсутствует в принципе. Очевидна целесообразность проведения теоретических и экспериментальных исследований, обеспечивающая экспортный потенциал и замещение импорта систем управления сельскохозяйственными агрегатами на основе цифровых технологий.
Актуальным является:
-разработка новых принципов, методических подходов, методов, алгоритмов для перехода к «интеллектуальному», «цифровому» сельскому хозяйству, основанному на применении автоматизированных систем принятия решений, автоматизации и роботизации производства;
-разработка систем управления сельскохозяйственными машинами, обеспечивающих удаленный контроль работы, сбор, обработку и анализ данных о ходе выполнения технологических процессов;
— разработка системы, основанной на применении возобновляемых источников энергии при орошении, данная система позволит использовать солнечную энергию для привода ходового оборудования, а также обеспечит работоспособность электронных систем и блоков роботизированного комплекса;
-разработка аппаратно-программного комплекса для ведения точного земледелия;
-комплексное внедрение точного земледелияс целью повышения урожайностисельскохозяйственных культур при экономном расходовании ресурсов (топлива, удобрений, агрохимикатов, воды, электроэнергии, человеческого труда), а также снижения экологической нагрузки на природу внедрением энергосберегающей экологически безопасной технологии производства сельхозпродукции;
-вывод на рынок новой научно-технической продукции отечественного производства, разработанных современных технологий.
В связи свышеизложенным, целью научно-исследовательской работы является созданиеэнерговодосберегающего высокопродуктивного сельскохозяйственногопроизводства путем внедрения системы управления орошением с разработкой роботизированного оросительного комплекса.
В ходе проведения научных исследований по использованию мелиоративной техники для орошения сельскохозяйственных культур в Саратовской области иприменения интеллектуальной системы управления, необходимо:
1. Провести анализ использования мелиоративной техники для орошения с учетом потенциала Саратовской области.
2. Провести обзор существующих инновационных систем управления и энергоснабжения дождевальной техники.
3. Сформировать концепцию дождевальной машины нового поколения с применением инновационных систем управления и энергоснабжения.
4. В ходе проведения исследований по разработке проекта роботизированного оросительного комплекса с интеллектуальной системой управления необходимо:
4.1.Разработать проект роботизированного оросительного комплекса с интеллектуальной системой управления и системой энергоснабжениякоторый в себя включает:
- разработку системы управления роботизированным оросительным комплексом на основе отечественного контроллера ОВЕН;
- разработку системы энергоснабженияроботизированного оросительного комплекса, основанную на возобновляемых источниках энергии.
4.2.Рассмотреть возможности организации серийного производства роботизированных оросительных комплексов в Саратовской области.
5.Спроектировать основные элементы роботизированного оросительного комплекса на основе технологий импортозамещения с возможностью организации серийного производства в Саратовской области.
1. АНАЛИЗ ИСПОЛЬЗОВАНИЯ МЕЛИОРАТИВНОЙ ТЕХНИКИ ДЛЯ ОРОШЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР В САРАТОВСКОЙ ОБЛАСТИ И ОБЗОР СУЩЕСТВУЮЩИХ ИННОВАЦИОННЫХ СИСТЕМ УПРАВЛЕНИЯ И ЭНЕРГОСНАБЖЕНИЯ
1.1 Анализ использования мелиоративной техники для орошения с учетом потенциала Саратовской области
В РФ более 70% сельскохозяйственных угодий расположены в недостаточно увлажненных и засушливых районах, где гарантированно высокий урожай можно получить только за счет применения орошения [41].
За годы перемен в экономической и политической жизни страны произошло сокращение общего объема орошаемых земель до 4,28 млн. га, из которых в хорошем состоянии только 2,27 млн. га, в удовлетворительном 1,12 млн. га, в неудовлетворительном 850 тыс. га. При этом поливаемая часть составляет 1,84 млн. га [37, 39]. Более чем на 50% сельскохозяйственных площадей наблюдаются процессы подъема грунтовых вод, засоления и заболачивания[37,39].
В РФ основными регионами, имеющими развитую мелиоративную систему, являются Поволжье, Ставропольский и Краснодарский края. В Поволжском регионе орошение наиболее распространено в Саратовской области.
Саратовское Заволжье имеет ярко выраженный континентальный климат, характеризующийся продолжительным и жарким летом, короткой, но суровой, иногда бесснежной зимой. Продолжительность теплого периода находится в пределах 120 дней.
Среднегодовое количество атмосферных осадков в лесостепной зоне составляет 400…500 мм, а за вегетационный период – 260…300 мм. В степной зоне годовое количество осадков уменьшается до 350…400 мм (250…270 мм за вегетационный период), а в зоне сухих степей снижается до 250…300 мм (70…230 мм за вегетационный период) [6]. Ущерб, наносимый засухой, зависит от ее продолжительности во время вегетации выращиваемых культур, осенних и весенних запасов влаги в почве. Стабильное развитие сельскохозяйственного производства в Саратовском Заволжье возможно только при орошении земель.
В 1990 г. Саратовская область имела около 500 тыс. га орошаемых земель [33]. В настоящее время, согласно данным Министерства сельского хозяйства РФ [34, 37, 44] на 2017 год общая площадь орошаемых земель Саратовской области составляет 257,3 тыс. га, из которых 154 тыс. га подлежат реконструкции и 103,3 тыс. га восстановлению. Динамика изменения орошаемых площадей и дождевальных машин за период с 1966 по до 2017 год в Саратовской области приведена на рисунках 1 и 2.
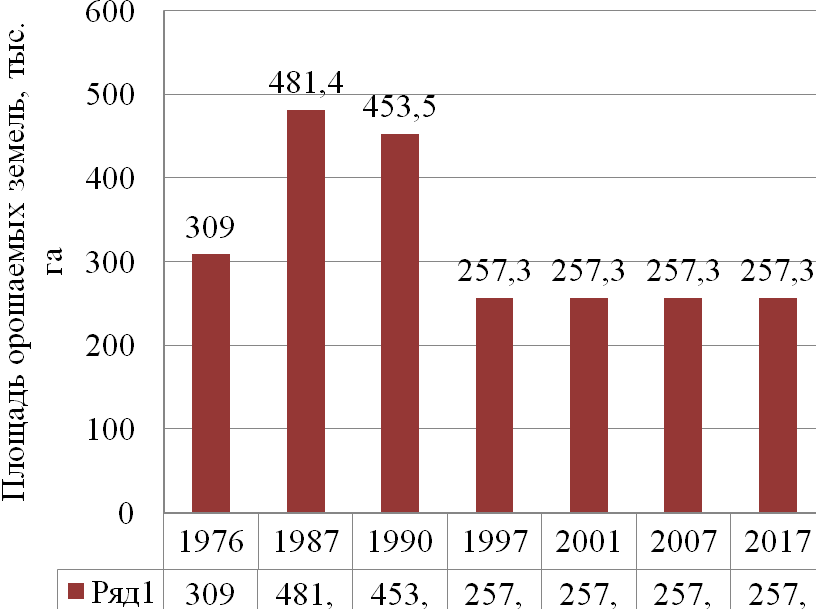
1976 1987 1990 1997 2001 2007 2018
Рисунок 1 –Площадь орошаемых земель Саратовской области
Известно, что в Саратовской области в хорошем состоянии находятся лишь 81,9% земель, в удовлетворительном 9,5% и в неудовлетворительном 8,6 %, преимущественно по причине солонцеватости [17].
Число дождевальной техники в области на 1990 г. составляло 6085 единиц, а к 2016 г. это число сократилось в 3,5 раза и составляет 1700 единиц [33]. В настоящее время в мелиоративном комплексе Саратовской области многоопорные дождевальные машины являются основными.
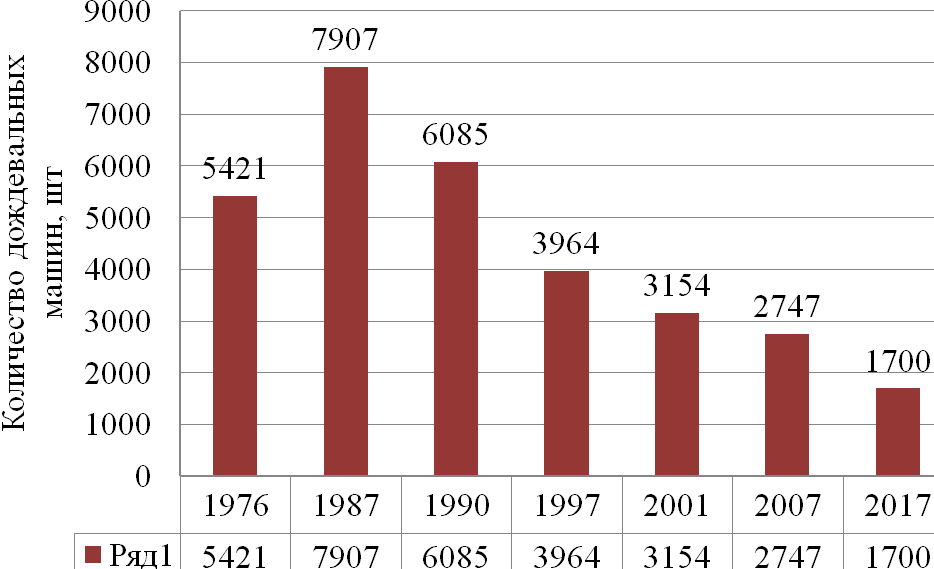
1976 1987 1990 1997 2001 2007 2018
Рисунок 2 – Наличие дождевальных машин в Саратовской области на 01.01.2018 г.
Главными их преимуществами являются: высокая производительность и качество дождевания, возможность полной автоматизации процесса полива, легкая приспособляемость к различным почвенно-рельефным условиям.
Электрифицированные машины кроме того имеют возможность реверсирования направления движения машины во время работы, а также перемещения без полива при холостых ходах, что значительно расширяет возможности машины.
За последнее десятилетие системы автоматизации развиваются в направлении экономии энергетических, водных и других ресурсов, увеличения количества одновременно выполняемых задач дождевальной техникой и изменения их параметров работы в режиме реального времени.
Потребность на сегодняшний день в дождевальной техники высокая. Как показывают исследования последних лет, вырос спрос наэлектрифицированныедождевальныемашины.
Этообъясняется тем,чтоблагодарясовременнымтехническимсредствам,которыеработаютнаэлектроэнергии, появилась возможность дистанционного контроля и управлениядождевальными машинами и, соответственно, поливом.
Таким образом, анализ сложившегося состояния в мелиорации и направление стратегического развития страны показывают, что в ближайшие 5 лет (до 2025 г.) темпы сельскохозяйственного производства в растениеводстве будут наращиваться.
Почвенный покров Заволжья разнообразен, преобладающим типом почв являются черноземы [17](рисунок 3).
Одним из основных критериев при выборе дождевальной техники, ее характеристик с учетом состояния земель сельскохозяйственного назначения, должна быть их экологическая безопасность.
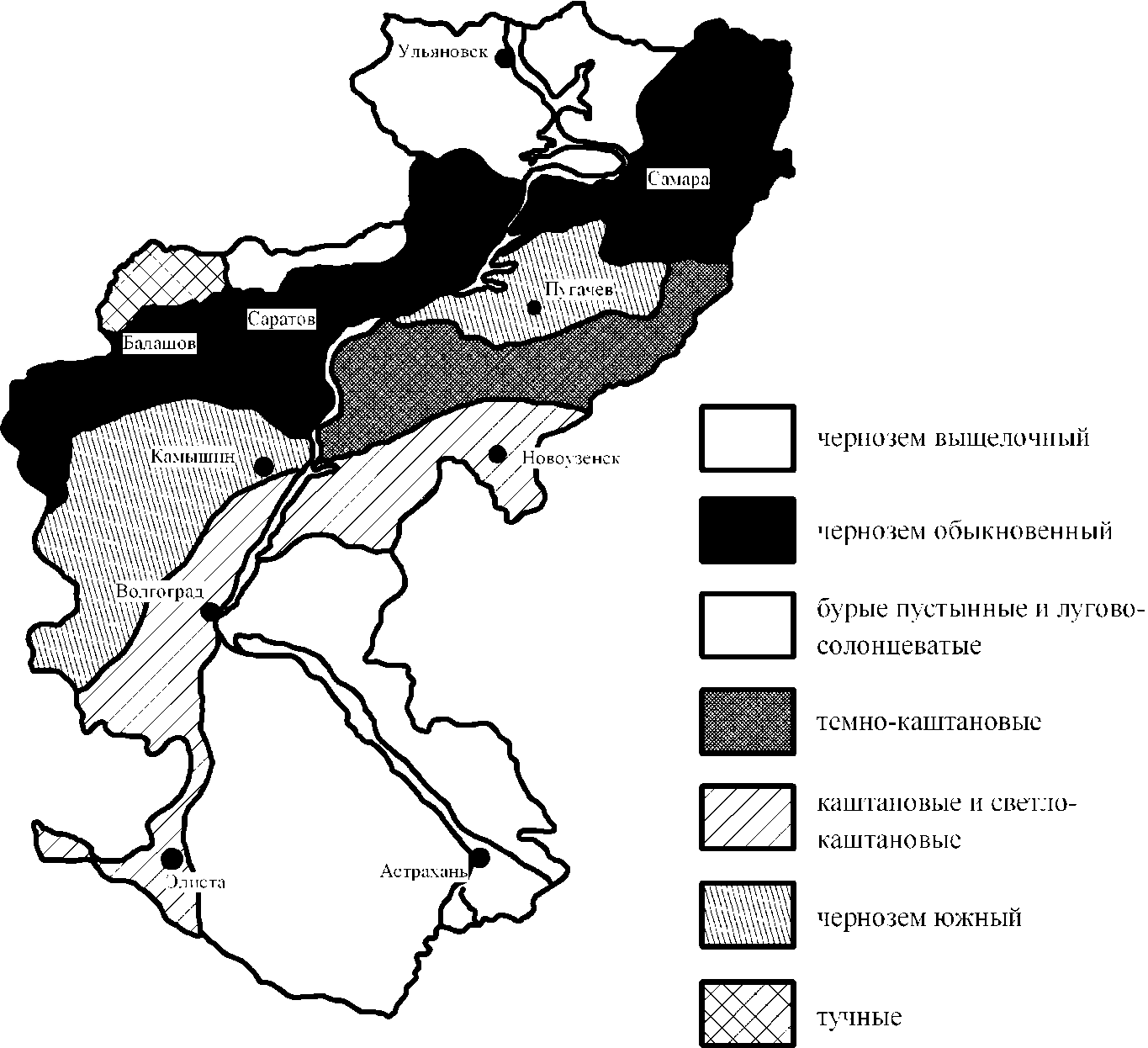
Рисунок 3 – Схематическая почвенная карта Поволжья
Увеличение доли земель в неудовлетворительном состоянии в последние десятилетия требует применения техники орошения, сохраняющей плодородие почв, исключающей непроизводительные потери оросительной воды, поверхностный сток, возникновение эрозионных процессов при поливе, заболачивание и вторичное засоление земель [7, 9, 10, 18].
Современная дождевальная техника должна отвечать следующим основным требованиям качества технологического процесса полива:
– малоинтенсивное длительное воздействие на растения и почву;
– регулирование и поддержание водного режима почвы в соответствии с цикличностью природных процессов;
– предупреждение засоления, заболачивания и эрозии почвы;
– возможность дробного внесения поливных норм, не превышающих значение среднесуточнойэвапотранспирации.
Существующие дождевальные машины, как старого, так и нового образца не могут быть полностью универсальными, применяемыми для всего разнообразия почвенно-климатических условий, культур, рельефов местности. Конструктивно-технологические особенности и параметры должны задаваться условиями эксплуатации, организационно-хозяйственными факторами, структурой севооборотов, естественной увлажненностью территории, экологическим состоянием земель и др.
На качественно новый уровень должны быть поставлены не только конструктивные параметры машин, но и учтены перспективные научные тенденции развития современной дождевальной техники в области цифровизации и роботизации данного направления.
1.2 Системы управления дождевальной техники ведущих мировыхпроизводителей
Цифровизация дождевальной техникив целом позволяет улучшить результаты сельскохозяйственных агрегатов, снизить материальные и временные затраты на организацию контроля за работой, сбор, обработку и анализ данных о ходе выполнения технологических процессов [3, 4].
На дождевальной технике от компании Valley используется серия интеллектуальных панелей Valley ICON (рисунок 4). Линейка ICON обеспечивает решения для любых потребностей. Можно воспользоваться преимуществами интуитивного интерфейса с полноцветным сенсорным дисплеем вне зависимости от того, приобретается ли новая круговая дождевальная установка, обновляется существующая панель управления или внедряется круговая дождевальная установка другой марки.

Рисунок 4 ‒ Интеллектуальная панель ICON компании Valley
В решениях по удаленному управлению орошением AgSense компании Valley используются цифровые сотовые технологии для дистанционного наблюдения и контроля ирригационного оборудования. Вследствие использования приложения AgSense на мобильном устройстве можно получить доступ ко всем собранным данным, поэтому возможно эффективно использовать в работе всю информацию. AgSense ICON Link представляет собой новый модуль удаленного управления, предназначенный исключительно для интеллектуальных панелей ICON. Он обеспечивает возможность удаленного программирования функций панели управления и мониторинга круговой дождевальной установки с помощью мобильного приложения AgSense или через систему BaseStation3™.
Компания Valley представляет так же пакет инструментов для высокоточного орошения FieldCommander. Этот пакет объединяет различные технологии AgSense в один набор для обеспечения непревзойденной гибкости в удаленном контроле и управлении практически любым оросительным оборудованием, независимо от его марки, возраста или текущих возможностей. Удаленное слежение и управление круговыми дождевальными установками и насосами, а также отслеживание расхода воды, давления и погодных условий. FieldCommander представляет собой средство контроля и управления круговыми дождевальными установками через систему GPS, которое предоставляет информацию в реальном времени и передает оповещения на сотовый телефон, смартфон или компьютер.
• Работает с любыми марками и моделями круговых оросительных установок и панелей управления.
• Позволяет удаленно реализовывать собственные предписания по орошению.
• Обеспечивает мониторинг с целью предотвращения кражи кабеля.
Система AgSenseCommanderVP® обеспечивает полностью удаленный контроль и мониторинг круговой дождевальной установки и панели управления. Заменяемый на месте эксплуатации мобильный модем позволяет использовать систему с сетями практически любых сотовых операторов по всему миру, а также исключает устаревание оборудования вследствие развивающихся технологий мобильной передачи данных.
Система CropLink® предоставляет возможность вести мониторинг и управление несколькими устройствами хозяйства, например по наблюдению за скважинами, расходом, давлением и погодой, обеспечивая лучшее представление о происходящем на поле. А система AquaTrac собирает данные с датчиков влажности почвы, позволяя с легкостью принимать решения по орошению со своего компьютера или смартфона на основании содержания влаги в почвенном разрезе.
Система Valley BaseStation3™ (рисунок 5) является наиболее комплексным, универсальным и современным решением удаленного управления орошением. Эта инновационная технология предоставляет возможность беспрецедентного управления операциями. Выбор технологий сотовой связи, радиомодема или интернет-протокола — управление всем оросительным оборудованием с настольного или портативного компьютера, планшета или смартфона. Сегодня BaseStation3 может встраиваться в любую панель ICON компании Valley.


Рисунок 5‒ Система Valley BaseStation3™
На дождевальной технике Zimmaticустанавливаются панели управления (рисунок 6) трех 3 версий:Basic, Visio и Bossи имеют в своем составе такие опции как светодиодная индикация системы управления, управление работой насосной системы, таймер работы систем, устройство контроля напряжения, сведения о состоянии – информационное меню, устройства навигации, регулирование подачи воды, выбор силы дождя, управление вспомогательным оборудованием, планирование полива, самодиагностика систем.

Рисунок 6‒ Панель управления Zimmatic
На дождевальной техникеReinkeустанавливаются панели RPM Advanced, RPM Preferred, RPM PreferredTouchScreen [25].
RPM Advanced применяется для более точного управления нормами выдачи воды. Этот тип управляющей панели дает возможность поделить поле на участки с разными требованиями к поливу. Панель RPM Preferred(рисунок 7) оборудуется специально разработанным RAMS-компьютером, который может быть легко запрограммирован. Этот модуль соединяется с компьютером USB-кабелем для передачи информации.
Применение системы ReinkeNavigator® GPS дает возможность с панели управлять дождевальными устройствами и крылом дополнительного полива углов.

Рисунок 7‒ Панель RPM Preferred
Панель RPM PreferredTouchScreen снабжена компьютером на базе Windows, с помощью которого можно: наблюдать графическое отображение данных, наблюдать за показаниями метеорологических станций, программировать и корректировать настройки, программировать сектора для выполнения орошения.
1.3 Системы поддержки принятия решений и дистанционное управление орошением
К инструментам в сфере орошения можно отнести дистанционное управление орошением. В качестве примера можно рассмотреть Trimble® Irrigate-IQ™ компании Trimble[19]. Благодаря Trimble® Irrigate-IQ™ можно управлять оросительной системой и выполнять контроль ее работы с любого компьютера, смартфона или планшетного компьютера (рисунок 8). Irrigate-IQ можно установить на множестве моделей дождевальных машин любых производителей, что позволяет выполнять управление и контроль всех систем орошения из единого центра. Управление и контроль в этой системе включают:
- Отображение и контроль скорости движения дождевальных машин, состояния (вкл/выкл), заряда аккумуляторов, давления и др.
- Дистанционное управление дождевальной машиной (вкл/выкл), расходом воды и направлением движения.
- Проверка состояния системы, возможность смены режима орошения или получение текстовых сообщений о работе дождевальной машины и т.п.

Рисунок 8 ‒ 1-конфигурация, 2-мониторинг, 3-управление
К функциям можно отнести: дистанционное управление и контроль системы орошения с любого устройства; использование системы на дождевальных машинах различных производителей и моделей, просмотр информации о состоянии в едином месте; внесение точной нормы орошения на полях с участками, засаженными различными культурами; снижение количества перемещений по полю; получение текстовых оповещений о состоянии системы для подтверждения ее нормальной работы.
Система ConnectedFarm (рисунок 9) позволяет выполнять сбор, обмен и управление информацией в реальном времени. Доступ к информации можно получить, находясь в любом месте с помощью компьютера, смартфона, планшетного компьютера илиагронавигатораTrimble TMX-2050. Также можно производить обмен информацией между различными сельскохозяйственными машинами, работающими на одном поле.

Рисунок 9‒ Система ConnectedFarm
Внедрение систем поддержки принятия решений на основе аналитики больших данных рассмотрим на примере цифровых решений корпорации Lindsay[24]. Система управления орошением BOSS помогает обеспечивать точность и повторяемость позиционирования с целью прецизионного управления орошением, внесением химикатов и работой вспомогательных приспособлений. К основным преимуществам системы можно отнести:
- Функция EZ Plan обеспечивает быстрый доступ к часто используемым параметрам планирования.
- Подачу воды можно приспособить к потребностям сельскохозяйственной культуры.
- Интенсивность работы системы настраивается под водоудерживающую способность почвы, снижая возможность чрезмерного внесения.
- Четыре варианта вспомогательного оборудования позволяют улучшить управление распылительными насадками, процесс обработки химикатами и удобрения.
- За счет возможностей планирования облегчается настройка программ орошения для нескольких сельскохозяйственных культур, частичного прохождения круга, различных свойств почвы и неровных участков.
- Функция самодиагностики определяет проблемы и снижает время простоя до минимума.
- В зависимости от порядка использования панель BOSS может способствовать сбережению энергии, минимизации вымывания минеральных веществ, снижению расхода химикатов и сокращению трудозатрат.
Система поддержки принятия решений FieldNET корпорации Lindsay(рисунок 10) обеспечивает быстродействующее и удобное решение для подачи воды, внесения удобрений и химикатов с дистанционным управлением круговыми и фронтальными системами, водяными пушками, инжекторами и насосами, а также возможностью отслеживания и записи всех данных – от использования воды и энергии до температуры и количества атмосферных осадков. Все это способствует сокращению времени, проводимого в поле, расхода ресурсов и усилению контроля за выполняемыми работами.
FieldNETAdvisor– это четыре мощных инструмента (орошение, растения, погода, точное орошение), встроенных в одно решение, которое не только дает ценные рекомендации по орошению, но также легко интегрируется в мощную удаленную систему мониторинга и управления FieldNET, позволяя производителям немедленно внедрять решения о поливе и следить за их прогрессом.
Рисунок 10 – Система поддержки принятия решений
Приведем описание функционала:
Блок орошение: рекомендует следующую дату и количество орошения; информацию по ежедневной и сезонной нехватке почвенной воды по всему полю; прогнозируемую нехватку воды в почве и потребность в ирригации в оставшейся части сезона; предупреждение об истощении почвенной воды; индивидуальные параметры управления ирригацией и предупреждения о рекомендациях; автоматический мастер установки начального поля позволяет использовать несколько культур, гибридов и даты посадки; автоматизированный импорт данных о почве; автоматизированные данные о применении орошения (глубина, местоположение, дата); при необходимости ручную загрузку существующих полей или почвенных карт.
Блок растения: информирует о текущей стадии роста урожая и глубине корня, позволяющего ручную регулировку; рекомендует ежедневное использование водных ресурсов; производит автоматическую корректировку рекомендаций по орошению, основанную на воздействии урожая.
Блок погода: информирует о текущих погодных условиях, связанных с полем; погодные метеорологические прогнозы по конкретным полям на 15 дней; ежедневные прогнозы погоды по конкретным районам на 15 дней; настраиваемые полевые предупреждения о погоде, изменяемые дневные количества осадков; данные с дополнительной полевой метеорологической станции в полевых условиях.
Блок точное орошение: автоматически генерирует постоянно обновляемые планы переменного орошения каждого сектора и постоянно обновляемые полные планы орошения (для этого требуется оборудование GPRS GradeMasterPrecision с индивидуальным управлением спринклером); планы переменного орошения каждого сектора динамически оптимизируются с учетом изменения стадии развития сельскохозяйственных культур, роста корней, погоды, применения ирригации, а также изменчивости почвы на всей территории.
Из вышеизложенного мы видим, что все ведущие мировые производители дождевальной техники используют панели управления, которым необходимо специальное оборудование и непрерывный доступ в интернет, что возможно только на полях расположенных вблизи городов.
Однако во всем мире ведутся научно-исследовательские работы по повышению эффективности использования водных ресурсов и качества управления технологиями орошения; по разработке водосберегающих, малоэнергоемких технологий и техники орошения, низконапорных дождевальных систем и аппаратов, технологий многофункционального использования дождевальных машин; развитию систем внутрипочвенного и локального орошения, мобильных автоматизированных систем полива; совершенствованию систем поверхностного полива.
1.4 Системы энергоснабжения дождевальных машин на основе возобновляемых источников энергии
Существуют технологии, позволяющие использовать возобновляемые источники энергии при работе дождевальной техники. Так экспериментальная дождевальная машина производства компании Pivot используетсолнечную энергию, преобразуя ее в электрическую энергию с помощью солнечных фотоэлектрических панелей, расположенных на центральном блоке (рисунки 11, 12, 13, 14). Для большей выработки электрической энергии ориентация солнечных панелей регулируется в течение сезона. Вырабатываемая электрическая энергия накапливается в блоке аккумуляторных батарей, которые, в свою очередь, обеспечивают электрической энергией дождевальную машину.


Рисунок 11 – Внешний вид неподвижной опоры с креплением солнечных панелей и блоком аккумуляторного питания

Рисунок 12 ‒ Солнечные панели RKD, Испания [26]

Рисунок 13 – Блок аккумуляторного питания

Рисунок 14 – Щит управления дождевальной машиной с использованием солнечных панелей
Благодаря выработке электрической энергии солнечными панелями, значительно сокращаются расходы на электроэнергию на предприятиях. Инвестиции в солнечные панели окупаются в течение нескольких лет, позволяя снизить эксплуатационные затраты примерно на 60% по сравнению с генераторными установками и более чем на 20% по сравнению с питанием от кабельной линии.
Во время сезона орошения солнечные панели эксплуатируются автономно. Например, дождевальная машина, предназначенная для орошения площади в 30 га, оснащенная солнечными панелями площадью 18 м2, позволяет работать 24 часа в сутки 7 дней в неделю. При пасмурной погоде, автономное использование дождевальной машины с солнечными панелями достигает 48 часов.
2. ФОРМИРОВАНИЕ КОНЦЕПЦИИ ДОЖДЕВАЛЬНОЙ МАШИНЫ НОВОГО ПОКОЛЕНИЯ С ПРИМЕНЕНИЕМ ИННОВАЦИОННЫХ СИСТЕМ УПРАВЛЕНИЯ И ЭНЕРГОСНАБЖЕНИЯ
2.1 Цифровые технологии и робототехнические средства в сельском хозяйстве
Цифровизация сельского хозяйства необходима для повышения эффективности и устойчивости его функционирования путем кардинальных изменений качества управления как технологическими процессами, так и процессами принятия решений на всех уровнях иерархии, базирующихся на современных способах производства и дальнейшего использования информации о состоянии и прогнозировании возможных изменений управляемых элементов и подсистем, а также экономических условий в сельском хозяйстве [4].
Мировая практика и опыт успешных отечественных сельскохозяйственных производителей показывают, что применение современных цифровых технологий позволяет сформировать оптимальные почвенно-агротехнические и организационно-территориальные условия, обеспечивающие в течение всего жизненного цикла сельскохозяйственной продукции значительное повышение урожайности и производительности труда, снижение материальных затрат на ГСМ, электроэнергию, средства защиты растений, оплату труда и другие виды расходов, сохранение плодородия почв и защиту окружающей среды.
Сельское хозяйство России как составная часть агропромышленного комплекса должно получить возможность использования широкополосной, мобильной LPWAN-связи, информационных технологий (BigData, искусственный интеллект, платформы управления), радиочастотных меток, контроллеров, датчиков, элементов управления отечественного приборостроения для существенного повышения эффективности.
Потенциал для модернизации отрасли огромен. Актуальность обеспечения продовольственной безопасности страны и развитие экспортного потенциала требуют превращения сельского хозяйства в высокотехнологичную отрасль, способную обеспечить продовольствием не только себя, но и многие страны мира. Необходимо создавать возможности для внедрения инновационных разработок, стимулировать принятие передовых управленческих решений, способных обеспечить население России качественными и безопасными продуктами.
Указом Президента России от 7 мая 2018 г. № 204 «О национальных целях и стратегических задачах развития Российской Федерации на период до 2024 года» поставлена задача преобразования приоритетных отраслей экономики и социальной сферы, включая сельское хозяйство, посредством внедрения цифровых технологий и платформенных решений.
Выделяют семь основных направлений цифровой трансформации сельского хозяйства и научно-технологического развития в области «Цифрового сельского хозяйства», что предполагает внедрение в субъектах Российской Федерации не менее шести проектов полного инновационного комплексного научно-технического цикла сквозных цифровых систем: «Цифровые технологии в управлении АПК», «Цифровое землепользование», «Умное поле», «Умный сад», «Умная теплица», «Умная ферма», основанных на современных конкурентоспособных отечественных технологиях, методах, алгоритмах.
В Российской Федерации многие сельхозтоваропроизводители осуществляют внедрение цифровых продуктов и решений как зарубежных, так и отечественных, а также предлагают собственные решения. Интеграция подобных решений в отечественном сельском хозяйстве развита недостаточно. Наиболее распространены решения, относящиеся к категории «Управление агропредприятием (ERP-системы)», однако многие проекты существует лишь в виде пилотных.
Особенно активно развиваются системы точного земледелия. Активность разработок в сфере таких решений по странам следующая: на первом месте с большим отрывом находятся США, второе занимают Германия и Япония, на третьем – Китай, к которому можно приравнять Францию и Нидерланды. Россия, к сожалению, имеет низкую патентную активность в области точного земледелия. Лидерами в области производства роботизированной техники для точного земледелия являются США, Нидерланды и Япония.
Среди шести проектов полного инновационного комплексного научно-технического цикла сквозных цифровых систем, по крайней мере четыре требуют применения технологий, связанных с орошением.
В последние годы внедрение цифровых технологий в области орошения росло быстрыми темпами. Спутниковые данные, сенсорные сети, аналитика данных и беспилотные летательные аппараты, повышают эффективность орошения и, как следствие, увеличивают урожайность. За последние несколько лет технологические компании все более активно участвуют в сельскохозяйственном секторе, предлагая технологии и услуги передачи данных, чтобы помочь фермерам максимизировать прибыль.
Можно выделить следующие ключевые элементы цифровизации орошения:
- Цифровая база: картирование, оцифровка, спутниковые данные.
- Цифровой инструментарий: геоинформационные порталы, сенсоры, мобильные приложения.
- Автоматизация и интеллектуализации: роботизация техники и внедрение элементов искусственного интеллекта, телеметрические системы.
- Системы поддержки принятия решений: аналитика и большие данные.
Цифровая база
Цифровой базой для орошения являются данные дистанционного зондирование Земли, например[4, 8], оперативное получение спутниковых снимков с Formosat-2 (NSPO, Тайвань), RapidEye (RapidEye AG, Германия) и аэрофотоснимков (рисунок 15).

Рисунок 15 – Дистанционное зондирование
Так, например, группировка из пяти мини-спутников RapidEye была запущена с космодрома Байконур одной российской ракетой-носителем «Днепр» 29 августа 2008 г. Владельцем космических аппаратов является компания BlackBridge AG (Германия), прежнее название RapidEye AG. Каждый из спутников, созданных компанией MDA (Канада) совместно с SSTL (Великобритания), оснащен мультиспектральной оптико-электронной камерой производства JenaOptronicsGmbH (Германия) для съемки с пространственным разрешением 6,5 м.Информация о текущем состоянии полей имеет большое значение в сельском хозяйстве. Аэрофотосъемка и космический мониторинг позволяют получить актуальные и достоверные данные. Съемка проводится с помощью летательных аппаратов, оснащенных мультиспектральными камерами. Одновременная съемка участка в различных спектральных диапазонах – это оптимальный способ наблюдения за состоянием посевов.
Мониторинг сельскохозяйственных территорий выполняет следующие функции [4]:
- оценка состояния сельскохозяйственных культур;
- анализ растительного покрова (степень содержания азота, протеина и хлорофилла);
- расчет площади земель, занятых зерновыми культурами;
- контроль мелиоративных, оросительных, уборочных, сенокосных работ;
- мониторинг паводковой ситуации и лесных пожаров;
- проверка увлажненности почвы;
- оценка объема будущего урожая;
- проверка готовности сельскохозяйственных земель к следующему сезону.
В рамках совместного проекта между Лабораторией реактивного движения НАСА и Лабораторией гидрологии и дистанционного зондирования USAARS(США) был запущен спутник под названием SMAP. Спутник собирает данные о влажности почвы со всего мира без использования наземных датчиков или других полевых измерений. Правительства и сельскохозяйственные производители могли бы использовать эти данные для лучшего информирования о том, когда, где и сколько применяемых оросительных вод может быть полезным.Вместе с этим рассматривается возможность спектрального анализа местности, например, комплекс еBee AG с программным обеспечением Pix4D [45] позволяет в один клик получить плотную модель местности с разрешением до 3 см (рисунок 16).
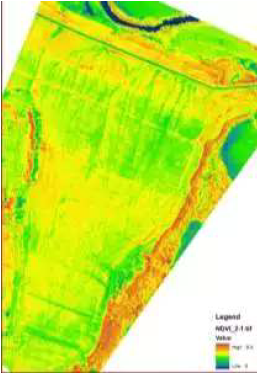
Рисунок 16 – Данные спектрального анализа местности
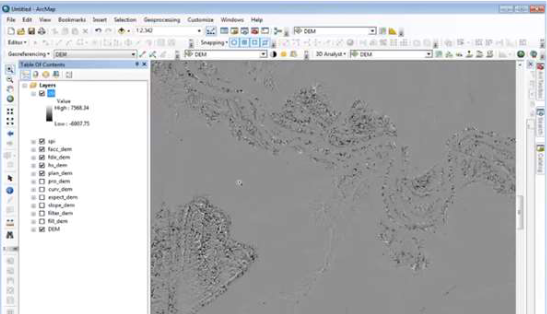
К элементам специализированного анализа [45] (например, компания GPScom) можно отнести гидрологический анализ, анализ рельефа, построение карт уклонов и бессточных областей на основе дистанционного зондирования. Он позволяет получать данные о рельефе местности с точностью от 5 см на пиксель изображения, что дает возможность на основе цифровой модели рельефа проводить различные виды гидрологического анализа: строить карты водотоков, определять бессточные области, получать карты уклонов или профили заданного участка поля (рисунок 17).
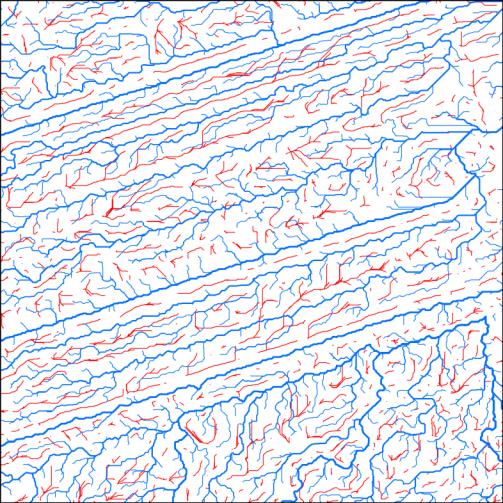
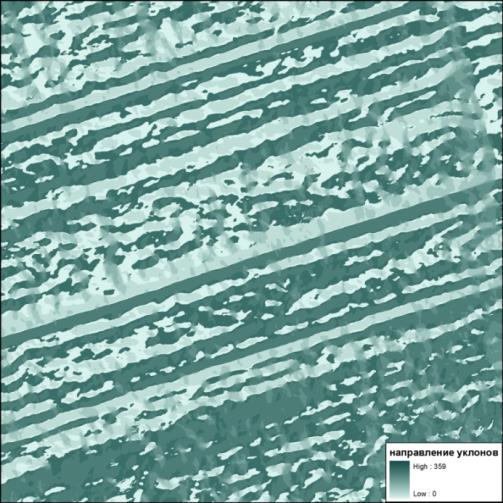
Рисунок 17 – Данные гидрологического анализа местности: карта водоразделов и водотоков (слева), карта направлений уклонов (справа)
К другим элементам можно отнести системы картирования урожайности, которые устанавливаются на комбайны и позволяют определять и фиксировать количество собранной сельскохозяйственной продукции. В эти системы зачастую интегрируют специальные компоненты, позволяющие, например, отслеживать изменения уровней влажности и урожайности на полях, как в системе картирования урожайности GreenStarHarvestDoc. Фирмой CLAAS (Германия) используется устройство Quantimeter, входящее в бортовую электронную систему Cebis, которое совместно с датчиком влажности определяет урожайность и количество сухой массы на каждом участке поля.
Цифровой инструментарий
К цифровому инструментарию можно отнести всевозможные датчики, сенсоры, метеорологические станции [4](рисунок 18) и геоинформационные системы. Глобальный мониторинг в реальном времени, мониторинг влажности почвы и урожайность максимизируют урожайность, экономят воду и энергию. Сенсорные сети могут использоваться для контроля водного баланса растений, эвапотранспирации растений или объемного содержания воды в почве. Анализ данных относится к использованию данных в реальном времени об энергопотреблении, условиях окружающей среды. Затем эту информацию можно использовать для автоматизации ирригационной системы, которая регулирует количество и частоту подачи воды на основе собранных данных, что позволяет принимать оптимальные решения.

Рисунок 18 – Метеорологическая станция в реальном времени
Информация из региональных метеорологических сетей и стационарных метеостанций может использоваться для отслеживания эвапотранспирации. Объединив эту информацию с данными об осадках и влажности почвы, можно установить точный график орошения.
Беспилотные летательные аппараты (рисунок 19) могут использоваться для аэрофотосъемки и сбора данных; информация затем может быть объединена с программным обеспечением, чтобы помочь определить тенденции, чтобы показать, как можно настроить ирригацию.


Рисунок 19 – Беспилотный летательный аппарат с блоком управления
Беспилотные летательные аппараты, оснащенные камерами и сенсорами, способны за несколько часов работы обследовать сельскохозяйственные участки внушительных размеров. Эти данные позволяют фермеру создавать электронные карты полей в формате 3D, рассчитывать нормализованный вегетационный индекс NDVI, инвентаризировать проводимые работы, охранять угодья. Дроны, оснащенные гиперспектральными, мультиспектральными или тепловыми датчиками, способны определять области, требующие изменений в орошении. Microdrones ‘+ tkit от mdSolutions[45], например, использует признанный датчик для захвата изображений на пяти спектральных диапазонах, что позволяет фермерам быстрее и точнее оценивать состояние посевов и орошения.
Геоинформационные системы (ГИС) [5] – это автоматизированные системы, основными функциями которых являются сбор, хранение, интеграция, анализ и графическая визуализация в виде карт или схем пространственно-временных данных, а также связанной с ними атрибутивной информации о представленных в ГИС объектах. Сегмент ГИС уверенно растет благодаря использованию данной технологии для сбора, хранения и анализа данных для сельского хозяйства, в общем, и для орошения, в частности [4].
Геоинформационные системы позволяют анализировать различные факторы (рисунки 20 и 21). Например, средства гидрологического моделирования – определять направления и интенсивность поверхностного стока. Средства геостатистического анализа позволяют выявлять пространственно-временные зависимости урожайности от множества факторов, таких как влажность, кислотность, состав и другие характеристики почв, время и объем внесения удобрения и ядохимикатов, и многих других. В общем, аналитические средства ГИС [20] позволяют решать огромное количество задач повышения устойчивости сельскохозяйственного производства и снижения затрат.
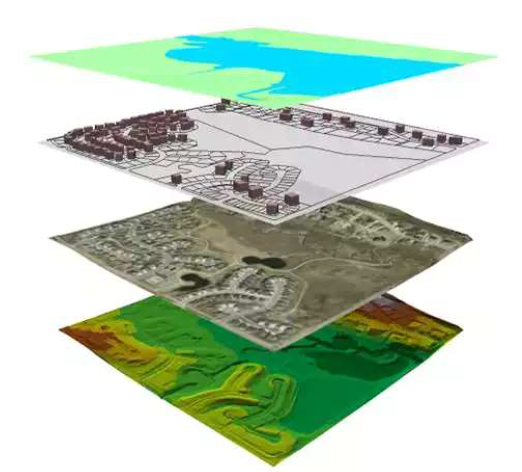
Рисунок 20 – Результаты ГИС — анализа
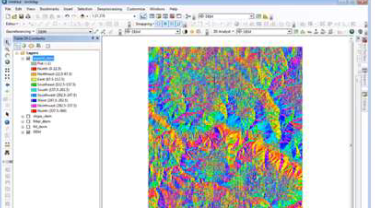
1 2
Рисунок 21 − Результаты расчета характеристик рельефа: 1) – экспозиция склонов, 2) – топографический индекс влажности (TWI).
К наиболее известным зарубежным ГИС относятся: ArcGIS, AtlasGIS (EnvironmentalSystemsResearchInstitut, США); AutoCAD (Autodesk, Inc., США); Intergraph (IntergraphCorporation, США) и др. [45].
Зарубежные разработки ГИС на российском рынке представлены давно, но из-за их высокой стоимости, а также отсутствия достаточного количества специалистов, умеющих с ними работать, при их использовании возникают определенные трудности. К известным отечественным ГИС разработкам относятся: ГИС «Панорама АГРО», ГИС «Карта 2011» (ЗАО «КБ «ПАНОРАМА»); Мобильная ГИС «ГеоПлан», ИАС «ГЕО-Агро» (ЗАО «ИЦ Геомир»); ГИАС «Управление сельскохозяйственным предприятием» (ЗАО «КБ Панорама», ООО «ЦентрПрограммСистем», ЗАО «ИЦ ГЕОМИР»); ГИС «АгроУправление», ГИС GEO’S (ООО «ЦентрПрограммСистем»).
Перед отечественной аграрной отраслью остро стоит задачаповышения производительности труда и конкурентоспособностисельскохозяйственной продукции на основе применения новейшихнаучных достижений и освоения новых технологий производства, внедрения технологий «точного земледелия».
Подобные технологии и технические средства полива практически не развиты в РФ, элементы систем закупаются отдельными производителями, комплексный подход цифровизации и роботизации производства сельхозпродукции отсутствует в принципе.
Именно поэтому актуальными и востребованными является работы по созданию в России современных отечественных роботизированных оросительных комплексов.
Основные преимущества роботизированного оросительного комплекса:
— работа на низком давлении – экономия электроэнергии/дизельного топлива;
— мягкий, щадящий растения полив – отсутствие уплотнения почвы;
— хорошие эксплуатационно-технические показатели;
— низкие энергетические и эксплуатационные расходы;
— современная система автоматического управления, система дистанционного управления, позволяющая контролировать движение машины, параметры орошения;
— применение возобновляемых источников энергии;
— интеллектуально-советующая система управления, принимающая решение по режимам полива в зависимости от поступающих внешних данных.
Оросительный роботизированный комплекс:
— обеспечивает повышение эффективности производства продукции растениеводства на орошаемых землях за счет экономии энергоресурсов, контроля параметров орошения, снижения затрат на обслуживание и ремонт;
— гарантирует простоту ремонта и замены узлов за счет использования надежного оборудования отечественного производства (в том числе исключается возможность долгосрочной поставки запчастей и комплектующих из-за рубежа);
— позволяет повысить производительность и качество работы за счет оптимизации системы водоподачи, а также применения возобновляемых источников энергии при орошении;
— обеспечивает удаленный контроль работы, сбор, обработку и анализ данных о ходе выполнения технологических процессов внесения удобрений и полива;
-обеспечивает повышение урожайности сельскохозяйственных культур при экономном расходовании ресурсов (воды, удобрений, агрохимикатов, электроэнергии, человеческого труда), а также снижение экологической нагрузки на природу внедрением энергосберегающей экологически безопасной технологии производства сельхозпродукции;
— имеет безусловное ценовое преимущество по сравнению с зарубежными и отечественными аналогами и обеспечивает снижение стоимость до 30% при сравнимом качестве полива, экологичности и безопасности.
— обеспечивает экономию воды, агрохимикатов и удобрений, точно регулируя нормы в зависимости от заданных координат движения оросительного комплекса по кругу и в зависимости от поступающих данных «онлайн», т.е. метеоданных, показателей датчиков влажности почвы, состояния посевов и др.
Целью работы является разработка концепции, алгоритмического и программного обеспечения интеллектуальных систем управления дождевальными машинами нового поколения с использованием интеллектуальной системы управления.
2.2 Постановка задачи интеллектуального управления роботизированным оросительным комплексом
Современные системы управления, как правило, функционируют во взаимодействии с другими системами, которые могут оказывать влияние на их поведение. При этом можно говорить о координированном управлении рядом объектов управления, возможно являющихся взаимосвязанными и взаимодействующими, что, скорее всего, недоступно для обнаружения локальной системе управления. Координация осуществляется посредством получения системами управления сигналов, являющихся обобщенными оценками качества управления всей совокупностью управляемых объектов с точки зрения внешнего наблюдателя, в качестве которого могут выступать как другие системы управления текущего уровня, так и системы управления более высоких уровней иерархии. Таким образом, необходимо изменять характер функционирования системы управления не только на основе количественных данных об объекте управления и среде его функционирования, но и с учетом качественных оценок, с помощью которых реализуется координация целей функционирования сообщества взаимодействующих систем управления совокупностью (возможно взаимосвязанных и взаимодействующих) объектов управления.
Общая схема автоматизированной системы управления может быть представлена диаграммой, показанной на следующем рисунок 22.
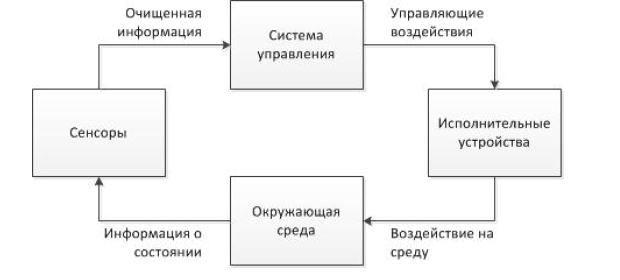
Рисунок 22 – Общая схема автоматизированной системы управления
Сенсоры, сама система управления и исполнительные устройства − всё это можно воспринимать как некоторые функции, через которые осуществляются реактивные воздействия на среду. Вместе с тем, это именно реактивная схема управления, в которую требуется внести изменения для повышения степени интеллектуальности.
Интеллектуализация представленной схемы управления заключается в наращивании дополнительного контура принятия решений, работа которого основана на двух дополнительных возможностях – машинном обучении и логическом выводе. Интеллектуализированная схема управления показана на следующем рисунке 23.

Рисунок 23 – Общая схема интеллектуальной системы управления
Как видно, единая система управления разбита на две подсистемы:
1. Реактивная подсистема управления – фактически, реализует традиционную схему управления, когда сигналы с сенсоров обрабатываются системой управления и по ним осуществляется формирование управленческих воздействий на среду (объект управления) через исполнительные устройства.
2. Проактивная подсистема управления – добавляет дополнительный промежуточный уровень, который позволяет осуществлять обучение системы, построение прогноза на основе моделирования среды и своего поведения в ней, построение плана действий и сравнение факта с прогнозом и планом для осуществления обучения (адаптации) системы к изменяющимся условиям внешней среды. Эти подсистемы связаны друг с другом при помощи передачи фокуса управления.
Когда проактивная подсистема создаёт новый паттерн поведения системы в изменившихся условиях, и среда «устоялась», созданный вариант управленческого воздействия спускается в реактивную систему, происходит автоматизация реакции, так как, фактически, для неизменяющихся условий деятельности обучение и проактивное поведение не требуется, а потому реактивная реакция будет работать быстрее. Если же в процессе «рефлекторного» действия реактивной системы обнаруживается изменения в среде или объекте управления, то реактивная система эскалирует фокус внимания на проактивную для обработки изменившихся условий и выработки новых правил и паттернов поведения.
Цикл управления в рамках такой интеллектуализированной системы управления теперь заключается в последовательном выполнении следующих шагов:
1. Сбор входной информации со всех сенсоров, которые осуществляют мониторинг различных параметров объекта управления и среды, в которой функционирует система. Каждый тип сенсора в этом случае является отдельной индивидуальной модальностью восприятия системы.
2. Сенсоры очищают входную информацию от шумов и осуществляют первый выбор пути дальнейшей обработки. Если входная информация с сенсоров соответствует каким-либо автоматическим паттернам поведения системы, то фокус управления передаётся в реактивную подсистему, которая выбирает конкретный паттерн и исполняет его. Однако если в процессе реагирования по реактивному сценарию система обнаруживает, что что-то пошло не так, осуществляется эскалация на проактивную подсистему управления, как было описано ранее.
3. Если входная информация не имеет автоматической реакции для своей обработки, то осуществляется интеграция всех модальностей восприятия системы в единый блок описания объекта управления и среды. На выходе этого модуля появляется целостная картина восприятия, которая передаётся в проактивную подсистему управления.
4. Проактивная подсистема управления принимает решение на основе имеющихся у неё динамических моделей себя самой, объекта управления и среды. Здесь должны использоваться методы машинного обучения и нисходящей парадигмы искусственного интеллекта. На выходе проактивной подсистемы управления появляется управленческое воздействие, которое записывается в реактивную подсистему в качестве нового правила или сценария, а также направляется на исполнение.
5. Для исполнения управленческое воздействие переводится на язык конкретных исполнительных устройств, которые взаимодействуют с объектом управления и средой. Исполнительные устройства выполняют команду. Цикл работы завершается.
2.2.1 Общие принципы систем управления. Искусственные нейронные сети
Обобщая различные подходы к построению искусственных систем построения (ИСУ), в том числе и рассмотренные выше, сформулируем принципы построения ИСУ:
a) использование априорной информации, наличие средств задания сведений:
- о требованиях к точности и качеству процесса управления заданным объектом;
- об объекте управления;
- о внешней среде;
- о наличии и составе подчиненных систем управления нижележащих уровней иерархии, оценку функционирования которых следует осуществлять;
- о наличии и составе систем управления вышележащих уровней иерархии, получаемые оценки от которых необходимо учитывать в процессе своего функционирования;
b) использование текущей информации, возможность получения информации об окружающей среде (измерительная система) для формирования текущего значения управляющего воздействия;
d) целеполагание, формирование (модификация) цели управления на основе априорно заданных требований к точности и качеству процесса управления заданным объектом и текущего «эмоционального» состояния ИСУ;
e) самоорганизация, предусматривающая наличие и использование:
- средств формирования самооценки текущего состояния процесса управления, как оценки соответствия параметров процесса управления имеющимся целям управления;
- оценок от ИСУ старших уровней иерархии;
- «эмоционального» состояния системы, формируемого на основе самооценки и оценок, полученных от ИСУ старших уровней иерархии;
- средств построения математических моделей объекта управления и внешней среды (подсистема идентификации);
- средств формирования структуры и параметров закона управления в соответствии с априорной и текущей информации о состоянии объекта управления, цели управления и внешней среды с помощью интеллектуальной системы синтеза, включающей:
i) средства планирования действий по решению декларативно (непроцедурно) поставленных задач синтеза закона управления на основе имеющихся в базе знаний сведений о методах решения задач теории автоматического управления (решающая подсистема);
ii) средства выполнения действий по решению задачи синтеза и формированию закона управления в соответствии с построенной (известной) процедурой ее решения (исполнительная подсистема).
f) стабилизация целевого состояния (стабилизирующий регулятор) объекта управления в целевом состоянии с помощью, например:
- средств формирования стабилизирующего управляющего воздействия в виде нечеткого (нейро-нечеткого) закона управления на основе априорной информацией об объекте управления, цели управления и внешней среде;
- средств формирования стабилизирующего закона управления (интеллектуальная система синтеза) на основе методов «точного управления» в соответствии с априорной информацией об объекте управления, цели управления и внешней среде;
g) управление в реальном масштабе времени, вычисление управляющих воздействий на объект управления (вычислитель управления) в виде:
- микроконтроллера, использующего программную реализацию закон управления;
- нейроконтроллера, реализующего в виде искусственной нейронной сети (ИНС) закон управления.
Структура интеллектуальной системы управления
Структурный состав самоорганизующейся интеллектуальной системы автоматического управления:
- измерительная система, объединяющая все измерительные устройства, служащие для получения информации из внешней среды;
- вычислитель управляющего воздействия, осуществляющий вычисление величины управляющего воздействия на основе закона управления и данных измерительной системы;
- исполнительная система, представляющая собой совокупность исполнительных механизмов, предназначенных для осуществления реального воздействия на объект управления в соответствии с вычисленным значением управляющего воздействия;
- система формирования моделей объекта управления и среды функционирования на основе данных измерительной системы;
- интеллектуальная система синтеза закона управления, использующая в качестве исходных данных постановки задачи синтеза модели объекта управления, среды функционирования и цели управления;
- блок формирования цели управления на основе собственных целей поведения и эмоционального состояния самоорганизующейся интеллектуальной системы управления;
- блок самооценки осуществляет вычисление количественного эквивалента качественной самооценки («эмоции») поведения самоорганизующейся интеллектуальной системы автоматического управления.
Самооценка вычисляется на основе соответствия данных измерительной системы собственным целям самоорганизующейся интеллектуальной системы управления. В качестве таких собственных целей могут быть, например, соответствие результирующего поведения объекта управления поставленным целям управления, положительность качественной оценки oij, получаемой от систем управления старших уровней иерархии. Блок самооценки воспринимает качественные оценки, поступающие через измерительную систему от систем управления вышестоящих уровней. При получении негативных оценок ухудшается самооценка (эмоциональное состояние) системы управления и активизируется блок формирования цели управления, ужесточающий требования к точности и качеству процесса управления. Другой причиной ухудшения самооценки может быть неудовлетворительное (не соответствующее цели управления) результирующее поведение объекта управления. Причиной такого явления может быть неудовлетворительная модель объекта управления и среды функционирования. В связи с этим ухудшение самооценки активизирует и систему формирования моделей объекта управления и среды функционирования для построения уточненных моделей. В свою очередь модификация, как цели управления, так и моделей объекта управления и среды функционирования активизирует интеллектуальную систему синтеза закона управления. Построенный закон управления передается далее вычислителю управляющего воздействия, изменяя, таким образом, процесс управления заданным объектом. На рисунке 24 представлена схема интеллектуальной системы управления.
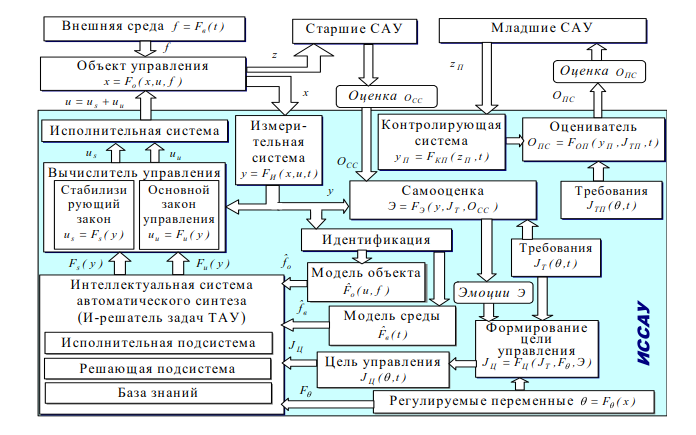
Рисунок 24 – Структура интеллектуальной системы автоматического управления
Нейроуправление
Нейроуправление (англ. Neurocontrol) является одним из видов интеллектуального управления, который использует искусственные нейронные сети для решения задач управления динамическими объектами [50].
Нейроуправление динамическими объектами является новым перспективным направлением, находящемся на стыке таких дисциплин, как автоматическое управление, искусственный интеллект, нейрофизиология. Рассмотрим наиболее распространенные методы нейросетевого управления.
Методы нейроуправления
В настоящее время в области нейроуправления известны два подхода по использованию искусственных нейронных сетей в системе автоматического управления: в качестве нейросетевого регулятора и/или нейроэмулятора объекта управления. Существующие методы нейроуправления основаны на принципах «подражания» или «инверсии».
Подражающее нейроуправление.
Основным компонентом подражающего нейроуправления является нейронная сеть (НС), обученная по принципу супервизорного обучения с использованием существующего регулятора (например ПИД-регулятора). При этом, обучающей выборкой являются примеры динамики эталонного регулятора (или в редких случаях запись поведения человека- оператора). Обучающая выборка составляется из значений входов и выходов регулятора в процессе штатного управления объектом. Схема подражающего нейроуправления представлена на рисунке 25: слева схема во время процесса обучения НС, справа – во время работы в качестве регулятора.
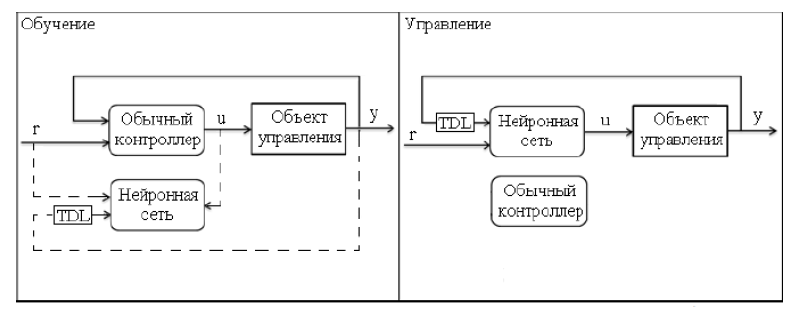
Рисунок 25 – Схема подражающего нейроуправления
НС обучается по одному из методов (по методу обратного распространения ошибки, например), используя полученную выборку. После этого НС полностью воспроизводит динамику регулятора, на основе которого строилась обучающая выборка, и может быть включена в контур управления вместо прежнего регулятора.
Подражающее нейроуправление– самый простой способ применения нейронных сетей в системах автоматического управления. Однако этот метод имеет ряд недостатков. Одним из главных недостатков является необходимость наличия регулятора, заранее настроенного для управления имеющимся объектом, для получения обучающей выборки. Полученный таким образом нейросетевой регулятор не сможет обеспечить качество управления лучшее, чем исходный регулятор. В связи с вышесказанным, данный метод нейроуправления используют чаще всего для первичного обучения НС, с целью последующего дообучения по другим методикам [50].
Инверсное нейроуправление.
Существует несколько вариантов рассматриваемого метода управления. Основным является обобщенное (или прямое) инверсное нейроуправление. Этот метод подразумевает обучение НС на основе данных, полученных с объекта управления (ОУ). В качестве входного сигнала ОУ и выходного значения обучающей выборки для НС используется некоторый случайный процесс. В качестве входных данных обучающей выборки нейронной сети используют выход ОУ. Для обучения используют метод обратного распространения ошибки.
После успешного обучения НС должна воспроизводить значения требуемого управляющего воздействия k в зависимости от желаемого выхода ОУ, т.е. НС должна вырабатывать управляющее воздействие, которое приведет ОУ в состояние, заданное уставкой. Обученная таким образом НС называется инверсным нейроэмулятором. Схема обобщенного инверсного нейроуправления представлена на рисунке 26: слева схема в режиме обучения инверсного нейроэмулятора, справа – в режиме управления объектом. Инверсный нейроэмулятор включается в контур управления объектом в качестве регулятора.
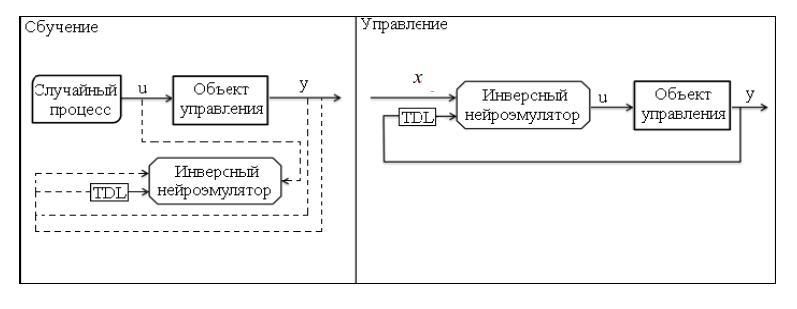 Рисунок 26 – Схема обобщенного инверсного нейроуправления
Рисунок 26 – Схема обобщенного инверсного нейроуправления
Прогнозирующее модельное нейроуправление.
Методы обучения нейросетевых регуляторов, при которых минимизируется отклонение текущего выхода ОУ от входного воздействия, не всегда хорошо справляются c задачей регулирования. Во-первых, если переходный процесс длится дольше, чем один такт, то НС, стремясь минимизировать рассогласование, может выдать большое управляющее воздействие, что приведет к перерегулированию.
Во-вторых, в таких системах всегда существует запаздывание из-за обратной связи, что ухудшает качество регулирования. В связи с этим, был разработан метод прогнозирующего модельного нейроуправления, который минимизирует функционал стоимости интегральной ошибки, прогнозируемой на несколько тактов вперед. Схема метода показана на рисунке 27.
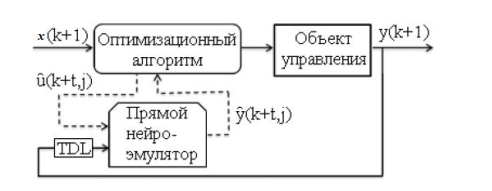
Рисунок 27 – Схема прогнозирующего модельного нейроуправления
Для прогнозирования будущего поведения ОУ и вычисления ошибок управления, используется прямой нейроэмулятор, обученный аналогично случаю обратного распространению ошибки через прямой нейроэмулятор (левая часть рисунка 26). Но отличие состоит в отсутствии обучаемого нейроконтроллера. Вместо него используется оптимизационный модуль, работающий в режиме реального времени.
На k-м такте оптимизационный модуль получает желаемую траекторию на несколько таков вперед. После этого, он подает на прямой нейроэмулятор различные управляющие воздействия и прогнозирует поведение ОУ и вычисляет наилучшую стратегию управления. В результате выбирается оптимальное управляющее воздействие, приводящее ОУ к нужному положению на целевой траектории.
Гибридное нейроуправление.
Гибридным нейроуправлением называют совместное функционирование нейросетевых регуляторов и стандартных регуляторов классической теории управления. Одним из видов гибридного нейроуправления является параллельное гибридное нейроуправление, схема которого представлена на рисунке 28.
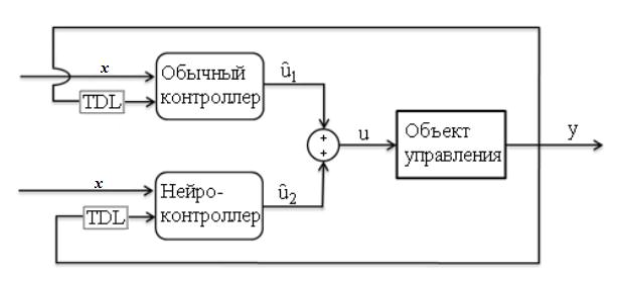
Рисунок 28 – Схема параллельного гибридного нейроуправления
Существует несколько способов обучения и подключения нейросетевого регулятора к системе управления. Например, сначала контур управления объектом замыкается классическим регулятором. Далее, нейроконтроллер учится управлять этой замкнутой системой, после чего он подключается к системе и управляющие воздействия нейросетевого и обычного регуляторов складываются. Либо в другом порядке: сначала контур управления замыкается нейросетевым регулятором, который проходит обучение. После этого настраивается обычный регулятор для управление этой системой. Настроенный регулятор подключается к системе и управляющие воздействия обоих регуляторов складываются.
Структуры нейронных сетей для нейроуправления
Искусственные нейронные сети являются моделями биологических нейронных сетей разного вида.
Нейронные сети по характеру структуры можно представить в виде двух больших классов, которые имеют принципиальные отличия друг от друга признаками отсутствия либо наличия межнейронных обратных связей в сети.
Поэтому нейроны сети подразделяются на:
1. Нейронные сети прямого распространения.
2. Рекуррентные нейронные сети.
Как правило, нейронные сети прямого распространения представляют в виде многослойных структур (в частных случаях и однослойных), которые обладают свойством прямонаправленности, т.е. любой из нейронов предыдущего слоя (включая входной слой) имеет возможность воздействия только на нейроны из последующих слоев.
У рекуррентных нейронных сетей в отличие от сетей прямого распространения имеются обратные связи. Нейронные сети различаются и по типу обучения:
1. Обучаемые с супервизором (с учителем).
2. Обучаемые через самоорганизацию.
Рассмотрим один из наиболее используемых видов нейронных сетей – сеть прямого распространения (персептрон), поскольку он является аппроксиматором нелинейной функциональной зависимости входа и выхода.
Нейронные сети являются совокупностью искусственных нейронов, которые связаны между собой синаптическими соединениями. Сеть обрабатывает входную информацию и формирует один или несколько выходных сигналов. Базовым модулем нейронных сетей является искусственный нейрон, который моделирует основные функции естественного нейрона (рисунок 29).
Математической формализацией искусственного нейрона являются уравнение сумматора [20]:
(2.1)
и уравнение активационного блока
(2.2)
где, для -го нейрона, − входные сигналы; − синаптические веса; − уровень опорного сигнала; − сигнал на выходе линейного сумматора; − функция преобразования активационного блока; − выходной сигнал.
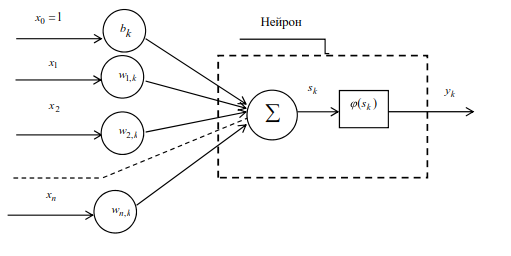
Рисунок 29 – Функциональная схема модели искусственного нейрона
Выбор активационной функции зависит от характера преобразования, которое выполняет нейронная сеть, а также от метода обучения.
Множество связанных по входам и выходам нейронов составляет искусственную нейронную сеть. Принцип работы простейшей нейронной сети (рисунок 30) следующий: ИНС воспринимает вектор входных сигналов и формирует сигнал на нейронах скрытого слоя. Вектор выходов нейронной сети снимается с выходного слоя. При работе с сетью различают два принципиально различных режима – обучение и работа. При обучении нейронной сети на ее вход подается некоторый тренировочный вектор входных сигналов, а значения весов связей и сдвигов нейронов скрытого и выходного слоев варьируются до тех пор, пока сеть не научится отображать некоторый набор тренировочных входных векторов в набор желаемых выходов. Основа нейронной сети – это архитектура связей и весовые коэффициенты, соответствующие этим связям.
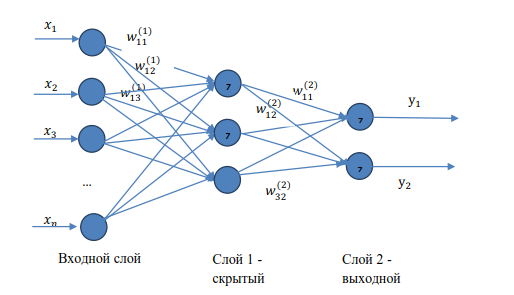
Рисунок 30 – Общая схема нейронной сети прямого распространения
Архитектура сети определяется количеством слоев, нейронов, активационной функцией нейронов и способом их соединения внутри сети. Число входных нейронов равно числу входных переменных. На нейроны входного слоя поступают данные, взятые из обучающей выборки, которые распределяются по нейронам остальных слоев сети. Архитектура связей фактически определяет, каким образом из отдельных нейронов сформирована сеть.
Нейроны скрытого и выходного слоев выполняют преобразование данных с помощью сумматора и активационной функции. Функциональные возможности нейронной сети возрастают с увеличением числа скрытых нейронов и связей между ними. Однако усложнение модели неизбежно приводит к росту вычислительных затрат, связанных с ее обучением и дальнейшим использованием.
2.2.2 Модель интеллектуальной системы нейроуправления
дождевальной машиной
В большинстве случаев на современных дождевальных машинах применяют электропривод с асинхронным двигателем переменного трехфазного тока или гидропривод. На щите управления путем изменения продолжительности включения электродвигателя задается скорость движения последней тележки, при этом движение остальных тележек аналогично происходит в режиме «старт-стоп» с автономным управлением прибором синхронизации движения. Время движения последней опорной тележки устанавливается с помощью процентного таймера, что определяет общую скорость движения по кругу всей установки. Существующая система управления представляется явно неоптимальной и требует совершенствования. Актуальной представляется разработка моделей интеллектуального управления, а именно управления на основе искусственныхнейронных сетей.
В СГАУ ведутся разработки систем управления сельскохозяйственными машинами, обеспечивающими удаленный контроль работы, сбор, обработку и анализ данных о ходе выполнения технологических процессов, основанный на использовании компьютерных технологий, аппаратно-программного комплекса для ведения точного земледелия. Учеными СГАУ был разработан роботизированный оросительный комплекс, система управления которого обеспечивает контроль функционального состояния и управления работой на дистанционной основе по сотовой связи (рисунок 31).
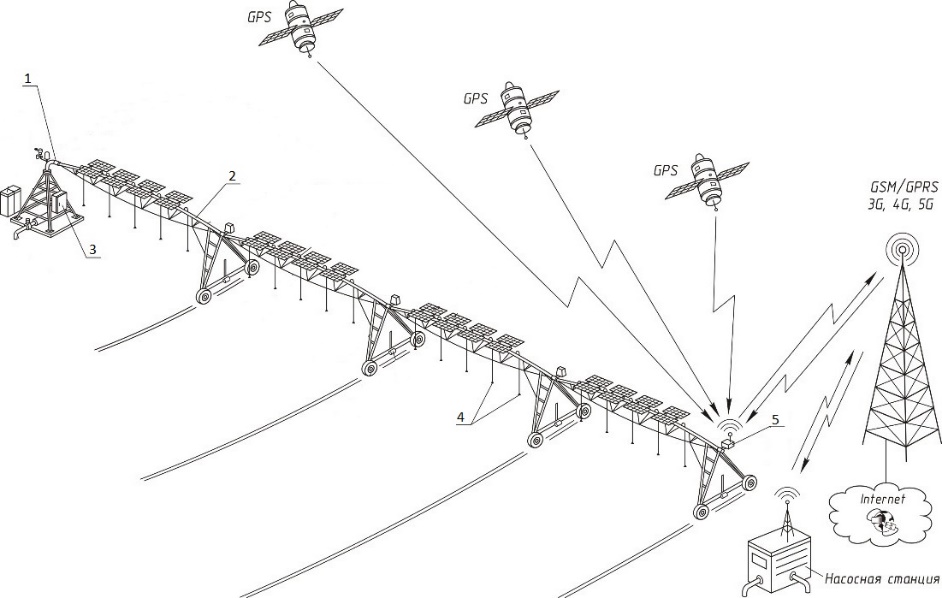
Рисунок 31 – Роботизированный оросительный комплекс
Оснащение оросительного комплекса бортовым компьютером, позволяет контролировать состояние всех систем, а также повысить качество работы за счет оперативного автоматического регулирования параметров посредством ПИ- и ПИД-регуляторов.
Для решения задачи синтеза закона управления системы автоматического управления (САУ) используется математическая модель объекта управления. При построении математической модели используются различные подходы:
- использование априорных сведений о конструкции объекта управления, что позволяет учесть его конструктивные особенности;
- использование методов пассивной и активной идентификации с получением экспериментальных данных о реакции объекта на известные воздействия.
Структурная схема нейросетевого вычислителя приведена на рисунке 32.
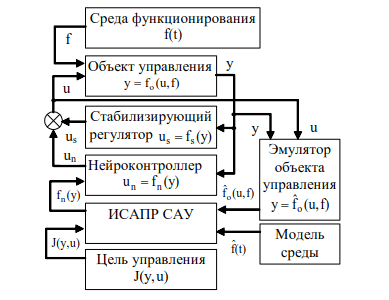
Рисунок 32 – Схема САУ с нейроконтроллером
Классическая схема регулирования имеет вид, представленный на рисунке 33.
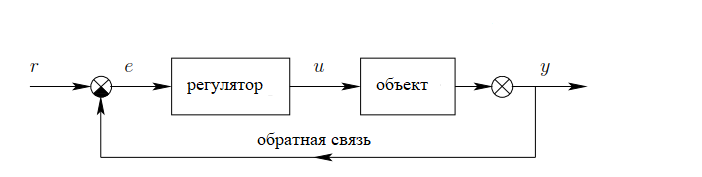
Рисунок 33 – Классическая схема регулирования
Применение наряду с классическими регуляторами, нейронных сетей в системах управления позволяет повысить качество функционирования сложных систем с нелинейными объектами и связями, к которым относится дождевальная машина или оросительный комплекс. Суть (рисунок 34) заключается в нахождении для данного момента времени при известных значениях входных возмущений с помощью НС значения управляющего воздействия с последующей его реализацией на объекте.
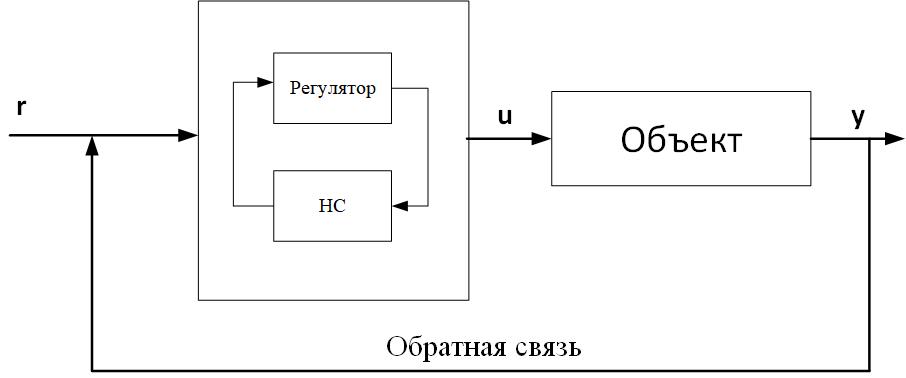
Рисунок 34 – Схема системы регулирования с использованием нейросетевой модели
Внедрение методов нейроуправления в системы управления дождевальных машин позволяет повысить качество функционирования сложных систем с нелинейными объектами и связями. Непосредственно в вычислительном модуле системы синтезируется нейроконтроллер, который для данного момента времени при известных значениях входных возмущений с помощью НС находит значение управляющего воздействия с последующей его реализацией управляющем модуле. Функциональная схема управления скоростью дождевальной машины (ДМ) для минимизации расхождения оптимальных и фактических величинах поливных норм представлена на рисунке 35.
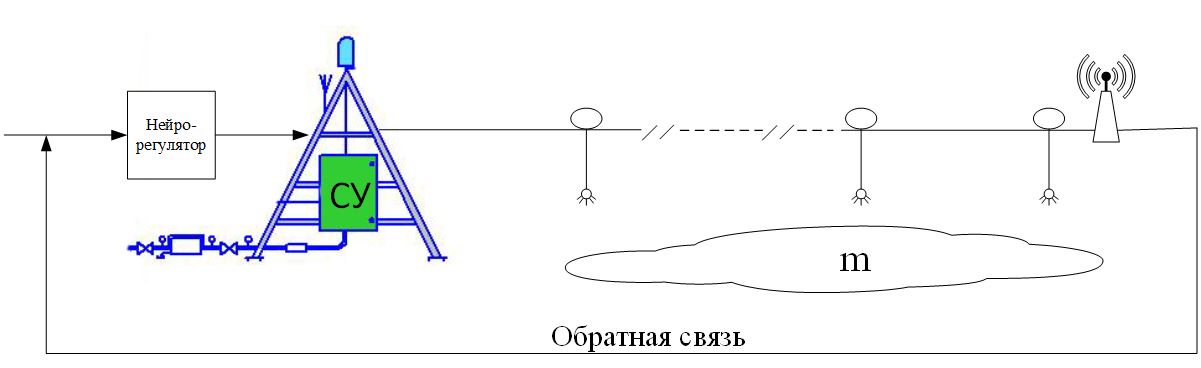
Рисунок 35 – Функциональная схема управления ДМ с интегрированным нейрорегулятором
На вход системы подается сигнал текущего значения скорости и вычисляется эталонный сигнал. Соответствующие массивы входных и выходных данных регулятора используются для синтеза нейронной сети для нахождения значения управляющего воздействия, миниминизирующего отклонение оптимальных и фактических величин поливных норм m. Данная информация поступает в систему управления дождевальной машиной для генерации оптимального управляющего воздействия.
На первом этапе составляется нейромодель объекта управления, в качестве которого в данном исследовании будем принимать блок управления скоростью V. На основании данных о скорости V строится и обучается нейромодель объекта, выходные сигналы которой будут максимально приближены к выходным сигналам реального объекта, в качестве которого будет выступать поливная норма m.
Процесс обучения нейромодели управления скоростью строится следующим образом: для создания обучающего множества на вход объекта управления подается случайный процесс V – значения скоростей. Обучающее множество формируется из входных управляющих воздействий скоростей n и выходных реакций поливных норм m. Выходной сигнал объекта m – поливная норма, выходной сигнал нейромодели – оценка поливной нормы mˆ . Разность этих значений является ошибкой e, которая пропускается через нейронную сеть в обратном направлении и используется для корректировки ее весовых коэффициентов.
Задача обучения нейронной сети заключается в нахождении значений и , имея заданные наборы данных. Нейронная сеть обучается на основе этих данных с использованием различных типов алгоритмов, позволяющая наиболее точно описать динамику системы. Все вышесказанное можно представить в виде обобщенной функциональной схемы проектирования нейросетевой модели (рисунок 36).
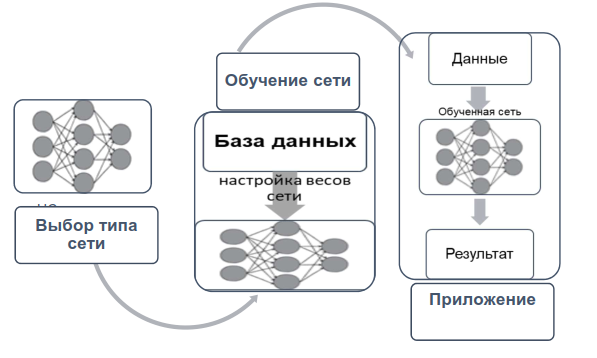
Рисунок 36 – Функциональная схема проектирования
Для синтеза нейроконтроллера возможно использование различных программных продуктов, таких как Matlab, R, Pyton и др. [45]. Нами использован алгоритм, реализуемый в среде Matlab [12] (пакет NeralNetworkToolbox). На первом этапе производился сбор исходных данных действующих широкозахватных дождевальных машин, необходимых для синтеза нейроконтроллера, а также программа расчета оптимальных поливных норм.
Выборка данных полевых исследований фактических значений скоростей и поливных норм электроприводных дождевальных машин представлена на рисунке 37.
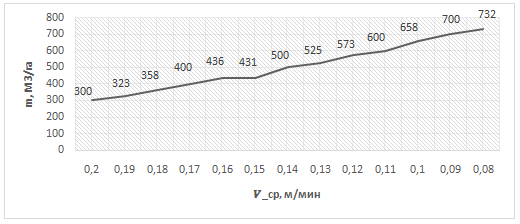
Рисунок 37 – Выборка данных полевых исследований
Задача синтеза нейроконтроллера не является тривиальной и требует скрупулезной работы по подбору топологии нейронных сетей, параметров обучения. В конечном итоге должна быть получена нейронная сеть, являющаяся моделью контроллера, правильно вырабатывающая выходной сигнал на обучающем множестве. Для проверки адекватности модели моделируют выходной сигнал системы на тестовом множестве. Исходя из результатов моделирования на тестовом множестве, можно заключить, что нейромодель вырабатывает выходной сигнал, соответствующий ожидаемому сигналу, при этом ошибка (разница между требуемой и фактической величиной поливной нормы) является минимальной. Нейронная сеть должна быть способна передать динамику процесса.
Принципиальная схема моделирования в программной среде Matlab/Simulink изображена на рисунке 38.
Рисунок 38 – Принципиальная схема моделирования в обозначениях системы Matlab/Simulink
Нейронная сеть обучается на основе этих данных с использованием алгоритма Левенберга–Марквардта [12]. Этот алгоритм наиболее часто показывает лучшие результаты по сравнению с другими алгоритмами, хотя и требует большего объема памяти. Была выбрана структура нейронной сети, позволяющая наиболее точно описать динамику системы: количество слоев – 2, первый слой содержит 6 нейронов, второй – один, функция активации − гиперболический тангенс, функция качества обучения – среднеквадратическая ошибка. Процесс обучения приведен на рисунке 39.
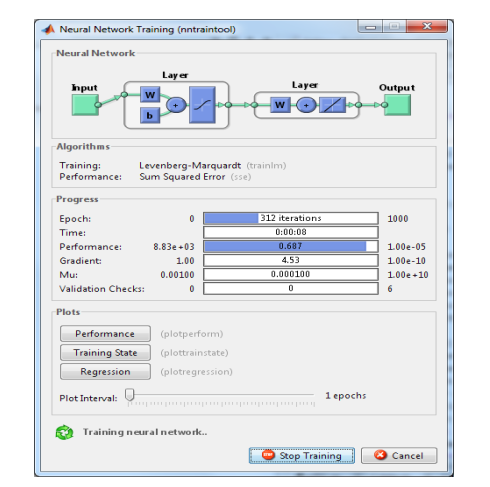
Рисунок 39 – Обучение нейросети в Matlab
Матрицы весовых коэффициентов первого и второго слоев и , а так же вектора смещений и задачи (2.1), (2.2), определяющие нейронную сеть, имеют значения:
,
,
.
Графическая иллюстрация работы сети приведена на рисунке 40 (элементы обучающей выборки отображены точками, сплошная линия − выход сети). Для проверки адекватности модели моделируют выходной сигнал системы на тестовом множестве, а также различные параметры сходимости и величины ошибок нейронов. Проведенное исследование ошибок и линий уровня для нейрона в зависимости от весов W и смещений b иллюстрирует адекватные параметры обучения. Лучший вес и значение порога — это самые низкие точки на поверхности ошибки.
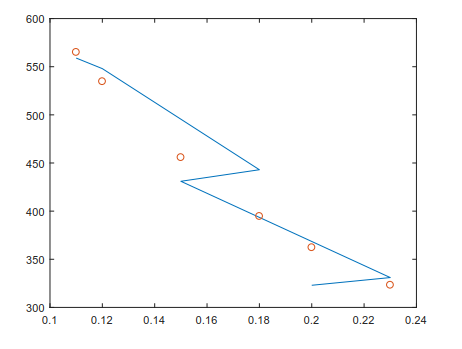
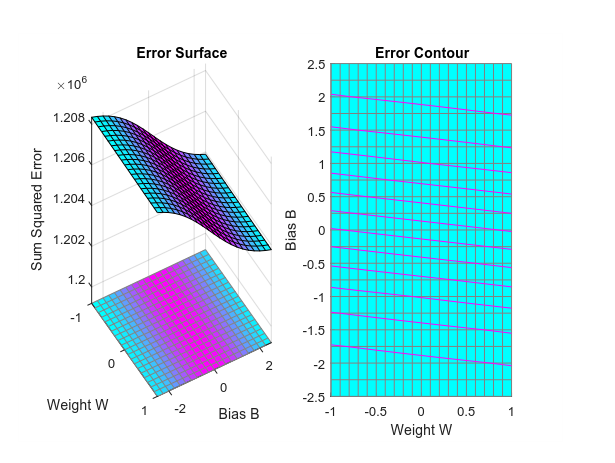
Рисунок 40 – Работа сети (слева) и поверхность ошибки нейрона (справа)
Исходя из результатов моделирования, можно заключить, что нейромодель вырабатывает выходной сигнал, соответствующий ожидаемому сигналу, при этом ошибка (разница между требуемой и фактической величиной поливной нормы) является минимальной − менее 2%.
Затем данная сеть подключается к регулятору. Весовые коэффициенты сети считаются постоянными, а настраиваются лишь веса сети-регулятора,минимизируя расхождение отклика эталонной модели и заданных нейронных сетей на одинаковый входной сигнал. После обучения регулятор используется в контуре управления.
В ходе моделирования работы алгоритма получаем визуализацию результатов работы управления (рисунок 41) с нейроконтроллером (3), а так же эталонной модели (1) и управления без коррекции (2).
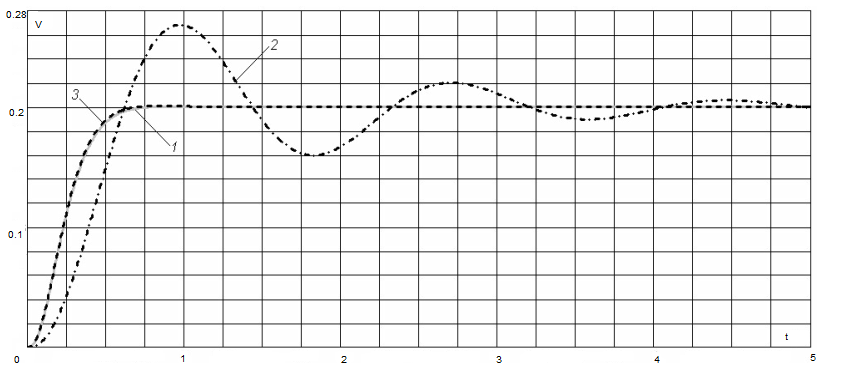
Рисунок 41 – Переходные процессы
На основе данных моделирования строим графики переходных процессов во времени (t). Как видно из приведенных графиков, управление с нейроконтроллером в структуре практически повторяет динамику эталонной модели, в то время как управление без коррекции имеет худшую динамику.
Предложен подход, основанный на модели интеллектуального анализа данных, а именно на модели нейроуправления скоростью. Большинство ирригационных систем используют управление типа контроллеров старт/стоп. Эти контроллеры не могут дать оптимальных результатов для разных временных задержек и разных системных параметров. Предложенный подход − на основе искусственной нейронной сети [50]. Основным параметром моделирования выступает скорость. Модель, основанная на управлении с нейроконтроллером, приводит к реализации управления близкого к эталонному, что позволяет сократить разрыв между заданной и фактической нормой полива до 2,3-3,6% в отличие от существующих 7-10%. Другим преимуществом является то, что нейроконтроллеры не требуют предварительного знания системы и обладают способностью адаптироваться к изменяющимся условиям в отличие от традиционных методов. И, наконец, развитие современной цифровой базы −измерительные устройства, микроконтроллеры, микрокомпьютеры, планшеты и смартфоны, позволяет реализовать нейроуправление практически на любой дождевальной машине согласно предложенной принципиальной схеме. Так оптимизируются параметры полива и уменьшаются затраты электроэнергии и воды дождевальной машиной с нейроконтроллером в системе управления.
2.3 Система энергообеспечения роботизированного оросительного комплекса на основе возобновляемых источников энергии
2.3.1 Применение технологии возобновляемых источников энергии при разработке роботизированного оросительного комплекса
Каждая опорная тележка ДМ проходит различный путь. Пропорционально пройденному пути требуется обеспечить продолжительность работы электропривода опорных тележек каждой секции и, соответственно, укомплектовать необходимым количеством тяговых аккумуляторных батарей (ТАБ). Рассмотрим пропорциональность времени работы секций при совершении дождевальной машины одного оборота (рисунок 42).
Если на каждой опорной тележке установлены электроприводы одинаковой номинальной мощности и частотой оборотов вала, то большая часть электроприводов будут находиться в режиме простоя, то есть, например, при длине секции l, путь, пройденный первой секцией в секторе окружности 1 радиан составит l метров, тогда для второй секции – 2l метров, для третьей секции – 3l метров и т.д. Тогда первая секция всегда будет ждать пока проедут этот сектор остальные секции.

Рисунок 42 – Внешний вид и динамические характеристики выполнения движения каждой секции ДМ (vОТ и ωОТ– линейная и угловая скорости перемещения опорных тележек секций)
Рассчитаем продолжительность работы электропривода на примере первой опорной тележки секции ДМ. Продолжительность работы первой опорной тележки секции зависит от длины водопроводящего трубопровода секции l1.
 (2.3)
(2.3)
гдеvОТ – линейная скорость перемещения, м/с (зависит от частоты вращения колес и, соответственно, частоты вращения электродвигателя; также зависит от продолжительности цикла повторного включения электропривода).
Минимальное потребление энергии на перемещение опорной тележки первой секции при tр1 → min будет соответствовать выражению
![]() (2.4)
(2.4)
где Рдв1 – пусковая мощность электродвигателя, Вт;ПВ%− показатель продолжительности включения электропривода в цикле, о.е.; апр – коэффициент преобразования зависимости; nакб– количество последовательно соединенных стандартных аккумуляторных батарей (АКБ); Е1 – электродвижущая сила стандартной АКБ. В; mакб − количество параллельно соединенных стандартных АКБ; СN1 – емкость стандартной АКБ, А∙ч.
Для опорной тележки второй секции, с учетом того, что длины трубопроводов секций равны l1 =l2
 (2.5)
(2.5)
Для опорной тележки j-ой секции
 (2.6)
(2.6)
Общее количество энергии
 (2.7)
(2.7)
Дождевальная машина, движется дискретно в повторно-кратковременном режиме и максимальная скорость полива осуществляется при ПВ% = 100% и продолжительности
tрДМ = tpj, (2.8)
где tpj – продолжительность работы крайней (последней) опорной тележки j-ой секции, ч.
Тогда в таком же режиме опорная тележка предпоследней секции работает
![]() (2.9)
(2.9)
где tnр-j-1 – продолжительность простоя опорной тележки j-1 секции, ч.
Продолжительность работы остальных опорных тележек будет пропорционально меньше в соответствии с выражением (2.9), что подтверждается выражением (2.3).
Когда требуется выполнить максимальную поливную норму mnн-max, повторность включения уменьшают. Например, ПВ% = 10%, тогда продолжительность работы всей дождевальной машины увеличивается на промежуток времени простоя
tрДМ = tpj + t0j, (2.10)
где t0j – продолжительность простоя опорной тележки крайней секции, ч.
В данном случае продолжительность работы опорных тележек предыдущих секций будет пропорционально сдвинута на t0j.
В момент простоя опорной тележки секции энергия не потребляется, то есть при рассмотрении выбора АКБ для всех секций ДМ достаточно рассматривать движение в повторно-кратковременном режиме ПВ% = 100%. Отсюда следует, что общее количество ТАБ для выполнения полива (при полном обороте ДМ) дождевальной машиной можно определить по выражению
 (2.11)
(2.11)
где j – количество секций (опорных тележек) дождевальной машины, шт.; NакбДМ – суммарное число аккумуляторов, зависящее от индивидуальной продолжительности работы электропривода каждой опорной тележки, шт.
Количество ТАБ для дождевальной машины NакбДМ зависит от числа секций j. Например, ТАБ с параметрами E1 = 12 В и СN1 = 55 А*ч обеспечивают 10 часов работы дождевальной машины, состоящей из 10 секций, в количестве 48 шт., а ДМ из 8 секций – 38 шт. Если ТАБ имеет характеристики E1 = 24 Ви СN1 = 110 А*ч,то ДМ, состоящая из 10 секций, проработает 10 часов на 12 шт. таких аккумуляторах.
Зависимость количества ТАБ от числа секций ДМ при tрДМ = 24 ч; E1 = 12 В и СN1 = 55 А*ч представлена на рисунке 43.
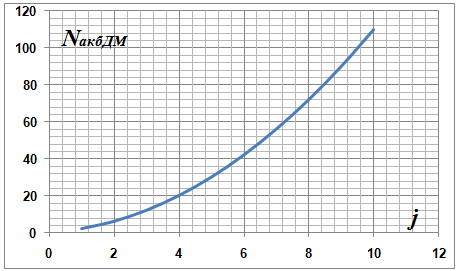
Рисунок 43 – Зависимость количества ТАБ от количества секций ДМ при условииtрДМ = 24 ч; E1 = 12 В и СN1 = 55 А*ч
Зависимость количества ТАБ от времени работы ДМ представлена на рисунке 44.
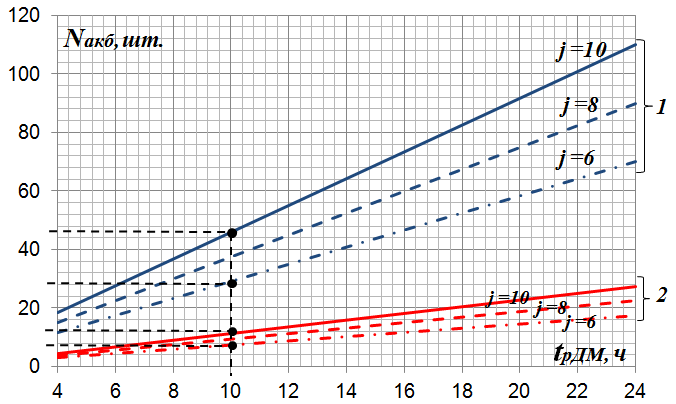
Рисунок 44 – Зависимость количества ТАБ от продолжительности работы дождевальноймашины при условиях: 1 — E1 = 12 В и СN1 = 55 А*ч; 2 — E1 = 24 В и СN1 = 110 А*ч.
Потребляемую энергию от аккумуляторной батареи необходимо восполнять. Восстановление запаса энергии аккумуляторной батареи оценивается параметрами емкости СN1 и напряжения на зажимах Uab.
Известно, чтобы восполнить энергию, переданную аккумулятором нагрузке, требуется энергия для заряда в соотношении
Wз = (1,2-1,3)Wp, (2.12)
где WзиWр – соответственно количество энергии заряда и разряда, кВт*ч.
Для заряда аккумуляторов дождевальной машины целесообразно использовать возобновляемые источники энергии (ВИЭ). Во-первых, условия эксплуатации ДМ позволяют использовать ВИЭ на открытом воздухе под действием прямых солнечных лучей и ветра. Во-вторых, первичная энергия ВИЭ является бесплатной, а стоимость вырабатываемой энергии определяется эксплуатационными затратами на обслуживание.
Примем допущение, что от возобновляемых источников энергии, например, от солнечной батареи стандартного типоразмера, можно получить в сутки для каждой секции энергию заряда (0,2-0,4)Wр с вероятностью М(t) = 0,9. Или такое же количество энергии заряда можно получить от ветрогенератора.
Определим промежуток времени, требуемый для восстановления энергии источника питания ДМ между поливами в двух случаях, когда электропривод опорной тележки крайней секции работает в режимах ПВ% = 100% и ПВ% = 10%.
Рассчитаем количество фактической, потребленной энергии и полученной энергии от возобновляемых источников энергии (ВИЭ) при ПВ% = 100% для одной секции ДМ. Остаточная энергия в АКБ рассчитывается как
WАКБi = WΣАКБ – W1р + W1з =WΣАКБ – РдвТ1tр-сут + WВИЭ, (2.13)
где WΣАКБ – номинальное максимальное количество энергии, запасенное в АКБ, кВт*ч; tр-сут – продолжительность работы секции ДМ, ч; WВИЭ – количество энергии, полученное от возобновляемого источника энергии, кВт*ч.
Количество энергии от ВИЭ за одни сутки (кВт*ч) можно определить по зависимости
 (2.14)
(2.14)
где псут – количество суток.
Если выразить количество энергии от ВИЭ в сутки как энергию разряда АКБ, то
 (2.15)
(2.15)
где kз – коэффициент, учитывающий полученную энергию от ВИЭ относительно затраченной энергии, kз = 0,2-0,3 с вероятностью М(t) = 0,9; kэкв – коэффициент эквивалентного заряда АКБ, kв = 1,2-1,3.
Тогда остаточная энергия АКБ с учетом продолжительности включения (ПВ), выраженная в долях, составит
 (2.16)
(2.16)
Если tр-сут = tp, то с учетом выражения (2.14) можно определить количество суток у, которое потребуется для восстановления номинальной максимальной энергии в АКБ
 (2.17)
(2.17)
где ПВ – продолжительность включения в цикле, указанная в долях (0,1-1,0).
Если за одни сутки (псут = 1, tсут = 24 часа) можно получить энергию от возобновляемого источника энергии согласно (2.15), то после преобразования, получим промежуток времени восстановления номинальной максимальной энергии АКБ у’ (2.18)
(2.18)
Изобразим восстановление энергии АКБ на рисунке 45 при различных режимах работы (ПВ = 100% и ПВ = 10%).
Рисунок 45 – Продолжительность восстановления номинальной максимальной энергии АКБ при получении 20% от ВИЭ с ПВ% = 10% и ПВ% = 100%
Таким образом, полученные данные позволяют сделать вывод о том, что аккумуляторный источник питания позволяет эксплуатировать ДМ в условиях сложных для подведения централизованного питания. В сравнении с переносным генератором АКБ можно устанавливать на передвижных опорных тележках, что исключает использование дорогостоящих токосъемника и кабельной линии для передачи энергии. С аккумуляторным питанием управление движением машины можно выполнить на более низком энергетическом уровне, например, питание всех приборов синхронизации движения в линию (ПСЛ) от 12 В постоянного тока, что снизит потребление энергии на устройство управления. Для реализации такого способа питания разработана полезная модель с описанием схемы питания автономной секции ДМ и получен патент на полезную модель (рисунки 46, 47, 48).
Рисунок 46 – Общий вид автономной секции дождевальной машины
Рисунок 47 – Вид сбоку автономной секции ДМ
Секция дождевальной машины состоит из водопроводящего трубопровода 1, опорной тележки 2, А-образной рамы 3, поперечной балки 4, колесных редукторов 5, кронштейна 6, электродвигателя 7, редуктора 8 с двумя выходными валами, карданных валов 9, колес 11 с пневматическими шинами 12, герметичного щита 13 с аккумуляторными батареями 14, соединенными через контроллер заряда 15 с солнечными батареями 16, установленными на Х-образных кронштейнах 17, прикрепленных к ферме 18 водопроводящего трубопровода 1, и с инверторным преобразователем 19, выводы которого соединены с электродвигателем 7 через контакты 20 магнитного пускателя 21, катушка 22 которого соединена с ПСЛ дождевальной машины 23.
Рисунок 48 – Структурная схема соединения элементов питания
Установлено, что при выборе параметров аккумуляторного питания (напряжение на зажимах нагрузки, емкости, схем соединения) следует учитывать продолжительность движения крайней секции в режиме непрерывного хода, когда ПВ% = 100%. Также установлено, что применение возобновляемых источников энергии в соотношении 15-20% от запасенной энергии АКБ в сутки с вероятностью М(t) = 0,9 позволит избежать затрат на ресурс в структуре общих эксплуатационных затрат. В режиме работы электропривода опорной тележки крайней секции ДМ ПВ% = 100% для полного заряда АКБ потребуется 5-7 дней (что по длительности совпадает с технологическими простоями между поливами), а при ПВ% = 10% − 1 день.
2.4 Повышение эффективности полива роботизированного оросительного комплекса
При проектировании полива культурных растений дождевальными машинами кругового действия стремятся охватить максимально возможную площадь. Обычно на необходимую поливную площадь комплектуют ДМ требуемым количеством секций. Для полива дополнительной площади в конструкцию ДМ добавляют секцию, тем самым увеличивают охват ДМ. Зарубежные производители ДМ предлагают различные варианты исполнения крайней секции, которая может быть поворотной с дополнительно установленным оборудованием (поворотным механизмом с электроприводом и специальной системой автоматизации). Также предлагаются другие варианты исполнения крайней секции.
Новый способ увеличения охвата полива путем установки на крайнюю секцию бустерного насоса с электроприводом и дальнеструйным дождевальным аппаратом (ДА) требуется рассмотреть с позиции энергопотребления. Предварительные данные применения бустерного насоса показывают, что можно увеличить охват полива по нескольким вариантам (рисунок 49) при различных настройках системы управления электроприводом насоса.
Данный способ охвата дополнительной площади полива требует установки дополнительного оборудования и подведения электроэнергии. Энергопотребление бустерного насоса определяется продолжительностью работы и мощностью электродвигателя этого насоса. Также дополнительный охват, представленный вариантами 1 и 3 рисунка 49, можно обеспечить путем установки дополнительного водораспределительного трубопровода с опорной тележкой. Энергопотребление электропривода на перемещение этой тележки определяется его продолжительностью работы и потребляемой мощностью. Данные способы охвата дополнительной площади необходимо обосновать по критерию наименьшего энергопотребления. А также обосновать возможные варианты применение бустерного насоса с электроприводом и дальнеструйным ДА на крайнюю секцию ДМ.
 |
 |
 |
| 1 вариант | 2 вариант | 3 вариант |
Рисунок 49 – Варианты дополнительного охвата поливной площади за счет применения бустерного насоса с электроприводом и дальнеструйным ДА
При сравнении энергопотребления на перемещение крайней секции и действия бустерного насоса необходимо учитывать площадь охвата рассматриваемых вариантов. Охват полива целой крайней секции, то есть площади поливного участка, зависит от длины трубопровода секции l (м) и порядкового номера n секции (рисунок 50).
 |
 |
Рисунок 50 – Охват полива крайней секции с разным порядковым
номером n секции
Поливная площадь крайней секции увеличивается в зависимости от порядкового номера (рисунок 51).
Рисунок 51 – Зависимость отношения площади полива i-ой секции к площади 1-й секции от количества секций ДМ
На основе приведенных данных, удельное энергопотребление на единицу поливной площади следует принять в виде показателя ws (кВт*ч/га)
 (2.19)
(2.19)
где Wi – количество электроэнергии, требуемой на полив площадью участка Si (га), кВт*ч.
Тогда удельное энергопотребление электропривода опорной тележки крайней секции
 (2.20)
(2.20)
где bn – коэффициент площади, учитывающий порядковый номер крайней секции из таблицы 1;
 (2.21)
(2.21)
где Sn – площадь полива n-ой секцией, га; S1 – площадь полива 1-ой секцией, га (с учетом того, что длины всех секций ДМ одинаковы l1 = l2 =…= ln = l).
Таблица1– Результаты расчета коэффициента площади по порядковому номеру секции
| Номер секции, п | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Коэффициент площади, bn | 1 | 3 | 5 | 7 | 9 | 11 | 13 | 15 | 17 | 19 |
По аналогии, удельное энергопотребление бустерного насоса с электроприводом и дальнеструйным ДА на предпоследней секции (вместо крайней) можно выразить
 (2.22)
(2.22)
где Wн – количество электроэнергии, потребляемое насосом, кВт*ч; Sн – площадь охвата полива насосом, га;
Количество электроэнергии для насоса будет зависеть также от количества пусков и кратности пускового тока электродвигателя насоса
![]() (2.23)
(2.23)
где Рнас – мощность электродвигателя насоса, кВт; tр-н – продолжительность работы насоса в нормальном режиме, ч; wн – количество пусков насоса; tп-н – продолжительность пускового режима насоса, ч; — среднее значение кратности пускового тока.
Площадь охвата дальнеструйного аппарата Sн определяется по дальности струи lн, а также из положения того, что насос находится на предпоследней секции (так как сравнивается с крайней секцией), что связывает площадь охвата полива струей с коэффициентом площади bn. Тогда площадь полива насосом определяется по формуле:
Sн = bnπlн2. (2.24)
Дальность струи lн зависит от мощности насоса и типа ДА, и также может быть сравнима с длиной водораспределительного трубопровода lсоотношением (рисунок 52)
lн = aнl, (2.25)
где ан – относительный коэффициент пропорциональности охвата полива насосом и водораспределительным трубопроводом, о.е.
Условием применения бустерного насоса с электроприводом и дальнеструйным ДА будет неравенство
wнS<wSn. (2.26)
а) |
б) |
Рисунок 52 – Полив бустерным насосом, установленным на предпоследней секции а) с охватом lн<l; б) с охватом lн>l
Подставим в неравенство (2.26) выражения (2.20) и (2.22) и обозначим потребление энергии через потребляемые мощности электродвигателей насоса Рнас и опорной тележки секции РдвТ1
 (2.27)
(2.27)
Продолжительность работы и число запусков электропривода опорной тележки крайней секции будет зависеть от заданного режима полива. Можно предположить, что режим работы бустерного насоса будет таким же. Примем допущения, что при одинаковом режиме полива tр-н = tр, w = wн, кратность пусковых токов и продолжительность пуска пропорционально соотносятся с потребляемой мощностью рассматриваемых двигателей, которыми можно пренебречь при расчетах энергопотребления, тогда, преобразовав условие (2.27), получим
 (2.28)
(2.28)
или
 (2.29)
(2.29)
Таким образом, условие (2.29) показывает, что применение бустерного насоса относительно показателя удельного энергопотребления будет оправдано, если охват дальнеструйного аппарата будет больше произведения ширины захвата водораспределительного трубопровода одной секции на квадратный корень отношения мощностей электродвигателей, рассматриваемых вариантов.
Применение бустерного насоса будет оправдано, по критерию минимального энергопотребления, например, если потребляемая мощность электродвигателя насоса составляет Рнас=440 Вт, а дальность струи превышает lн> 44 м (точка А на рисунке 53). При меньшей дальности струи ДА будет оправдано применение секции. Соответственно, если требуется большая мощность насоса, например, Рнас= 1000 Вт, тогда дальность струи должна превышать lн> 88 м.
Однако граница применения бустерного насоса на рисунке 53 учитывает только показатель удельного энергопотребления и не учитывает существенную разницу в стоимости этих вариантов с учетом получаемого охвата. Рассмотрим по аналогии условие применения бустерного насоса по показателю удельной стоимости сs (руб./га)
(2.30)
где Сi – стоимость способа охвата полива, руб.
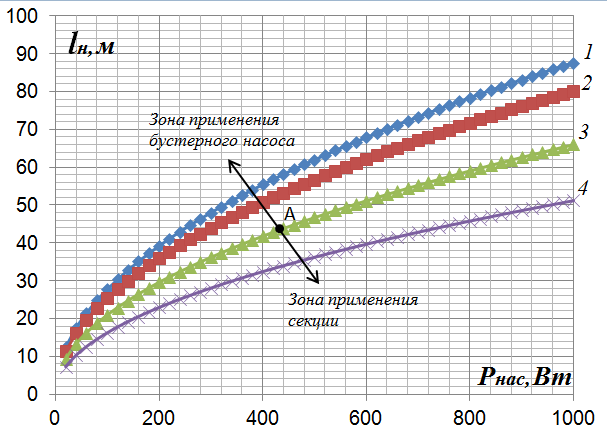
Рисунок 2.39 – Границы применения бустерного насоса с дальнеструйным ДА при мощности электродвигателя опорной тележки секции РдвТ1 = 550 Вт и длине трубопровода секции(1 – l = 65 м; 2 – l = 59,5 м; 3 – l = 49 м; 4 – l = 38 м)
Условием применения бустерного насоса по показателю удельной стоимости будет неравенство
 (2.31)
(2.31)
где Снас – суммарная стоимость оборудования и монтажных работ бустерного насоса с ДА, руб.; Ссекции – суммарная стоимость оборудования и монтажных работ секции, руб.
Применение бустерного насоса будет оправдано относительно удельной стоимости способов, например, если стоимость оборудования и монтажа насоса составляет Снас = 37 тыс.руб., а дальность струи превышает lн> 13,5 м в сравнении с секцией стоимостью Ссекции = 467 тыс.руб. ис длиной трубопровода l = 49 м (точка В на рисунке 54). Если при этих же данных секции, стоимость оборудования и монтажа насоса будет Снас < 10тыс.руб., то дальность струи ДА должна быть lн> 7,1 м.
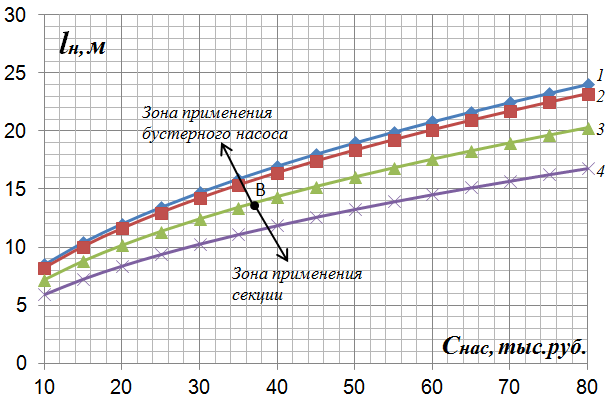
Рисунок 54 – Граница применения бустерного насоса с электроприводом и дальнеструйным ДА при 1 – Ссекции = 585 тыс.руб., l = 65 м; 2 – Ссекции = 526 тыс.руб., l = 59,5 м; 3 – Ссекции = 467 тыс.руб., l = 49 м; 4 – Ссекции = 410 тыс.руб., l = 38 м
Другие удельные показатели (потребление энергии, надежность, обслуживания рассматриваемых способов и т.п.) могут быть рассчитаны аналогичным образом и могут значительно отличаться друг от друга. Поэтому рассмотрим условие применения бустерного насоса относительно показателя полных эксплуатационных затрат, рассчитанных на срок 10 лет с учетом капиталовложений
 (2.32)
(2.32)
где Знас – полные эксплуатационные затраты бустерного насоса с электроприводом и дальнеструйным ДА, руб./(10 лет); Зсекции – полные эксплуатационные затраты на секцию, руб./(10 лет).
Однако, несмотря на показатели меньших стоимости и эксплуатационных затрат бустерного насоса в сравнении с секцией, обеспечить дальность струи lн по графику 55 в практических условиях невозможно с любым дальнеструйным аппаратом. С энергетических позиций оправданным будет применение секции.
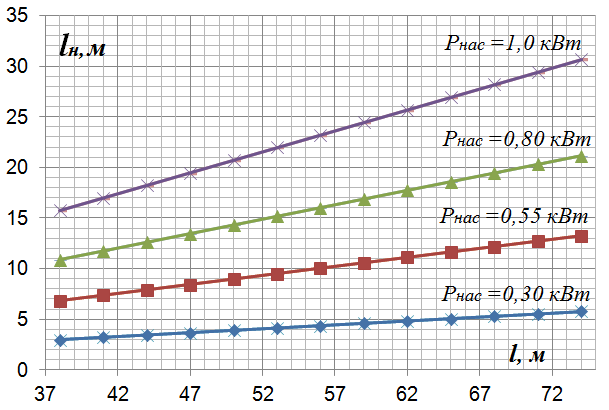
Рисунок 55 – Границы применения бустерного насоса дальнеструйным аппаратом по критерию полных эксплуатационных затрат, рассчитанных на 10 лет эксплуатации ДМ
Это связано с тем, что мощность электродвигателя бустерного насоса пропорционально зависит от дальности струи
 (2.33)
(2.33)
где kзап – коэффициент запаса по мощности, о.е.; Qн – подача насоса (расход), м3/с; Нн – общий напор, создаваемый насосом, м; ηдв, ηн и ηпер – коэффициент полезного действия электродвигателя, насоса и передачи, о.е.
Напор, создаваемый бустерным насосом можно записать как
 (2.34)
(2.34)
где dДА – внутренний диаметр насадки дальнеструйного аппарата, м.
Если выразить подачу насоса через гидромодуль дождевальной машины, и подставить в выражение (2.42), то мощность насоса
 (2.35)
(2.35)
где q – гидромодуль ДМ, м3/(м2*с).
По выражению (2.35) для дальности струи ДА lн> 42 м требуется мощность Рнас> 7,76 кВт (bn = 17, kзап = 1,2; q = 0,81∙10-7м3/(м2*с); dДА = 0,02 м).
Поэтому рассмотрим применение бустерного насоса, установленного на консольном трубопроводе длиной lконс, в сравнении с секцией (рисунок 56).

Рисунок 56 – Охват поливной площади консольным трубопроводом и бустерным насосом
Консольный трубопровод позволяет увеличить площадь охвата и снизить нагрузку электропривода бустерного насоса. Тогда с длиной консольного трубопровода условие (2.29) примет вид
 (2.36)
(2.36)
где lконс – длина консольного трубопровода, м;
Примем длину lконс как
lконс = fконсl, (2.37)
где fконс – коэффициент, показывающий отношение длины консольного трубопровода к длине трубопровода секции, о.е.
Преобразовав, с учетом (2.25) и (2.37) выражение (2.36) примет вид
 (2.38)
(2.38)
Выразим мощность электродвигателя бустерного насоса
 (2.39)
(2.39)
Если длина консольного трубопровода составляет 50% от длины трубопровода секции, то на рисунке 57a, b, c – указаны границы применения бустерногонасоса при различных длинах секции, соответственно, 49,5; 59; 65 метров. Цифрами 1, 2, 3 указана зависимость мощности электродвигателя насоса от дальности струи lн для дождевальных машин, состоящих, соответственно, из 5, 7, 9 секций (bn5 = 11; bn7 = 15;bn9 = 17). Пересечение границ a, b, c и графиков 1, 2, 3 определяют зоны применения бустерного насоса.
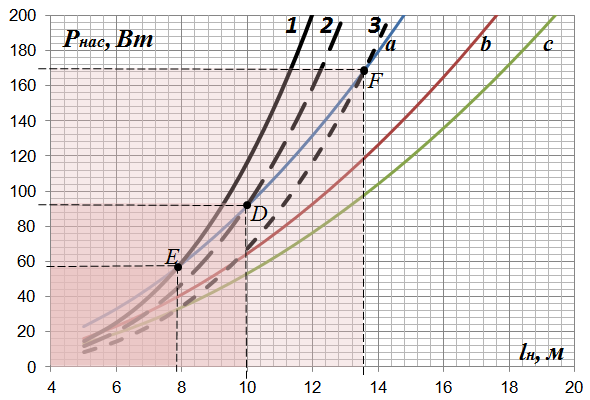
Рисунок 57 – Зоны применения бустерного насоса при длине трубопровода консоли lконс = 0,5 l
(1 – ДМ состоит из 9 секций [bn = 17]; 2 – ДМ состоит из 7 секций [bn = 15]; 3 – ДМ состоит из 5 секций [bn = 11]; а – длина трубопровода секции l = 49,5 м; b – длина трубопровода секции l = 59 м; с – длина трубопровода секции l = 65 м)
Например, для трубопровода секции длиной 49,5 метров дождевальной машины, состоящей из 5 секций, применение бустерного насоса будет оправдано, если длина консольного трубопровода будет составлять lконс = 0,5 l = 24,75 м, а дальность струи ДА, создаваемая бустерным насосом будет меньше 13,5 м (точка F на рисунке 57). Если же при тех же данных ДМ будет состоять из 7 секций, то зона применения сокращается, а дальность струи должна быть меньше 10,0 м (точка D на рисунке 57).
Для ДМ, состоящей из 9 секций, зона применения бустерного насоса также сокращается с lн< 7,7 м (точка Е на рисунке 57). Для ДМ с большей длиной трубопровода секции зоны применения бустерного насоса значительно меньше. При тех же параметрах сравнения, если длина консольного трубопровода составляет 70% от длины трубопровода секции зона применения бустерного насоса расширяется.
Для ДМ, состоящей из 9 секций с длиной трубопровода секции 59 метров и консольным трубопроводом длиной lконс = 0,7 l = 41,3 м, применение бустерного насоса будет оправдано с lн< 15,7 м (точка G на рисунке 58).
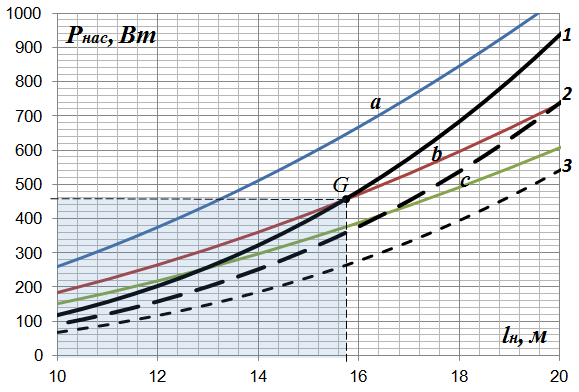
Рисунок 58 – Зоны применения бустерного насоса при длине трубопровода консоли lконс = 0,7 l
(1 – ДМ состоит из 9 секций [bn = 17]; 2 – ДМ состоит из 7 секций [bn = 15]; 3 – ДМ состоит из 5 секций [bn = 11]; а – длина трубопровода секции l = 49,5 м; b – длина трубопровода секции l = 59 м; с – длина трубопровода секции l = 65 м)
Однако, параметры консольного трубопровода (длина, диаметр и толщина стенки трубопровода) будут формировать суммарную нагрузку электропривода опорной тележки предпоследней секции. Поэтому полученные данные применения бустерного насоса определены с некоторым допущением, для электродвигателя мощностью 550 Вт. Дальнейшее исследование требует детального учета параметров консольного трубопровода.
Таким образом, применение бустерного насоса с электроприводом и дальнеструйным ДА зависит от показателей удельных энергетических затрат, удельной стоимости оборудования и монтажа, надежности, стоимости и состава работ по обслуживанию, а также мощности электродвигателя насоса и дальности струи дождевального аппарата. Применение бустерного насоса оправдывается только при использовании консольного трубопровода, длина которого должна соответствовать условию lконс> 0,5 l. Зона применения бустерного насоса также зависит от количества секций ДМ.
2.4.1Разработка технических средств роботизированного оросительного комплекса
В устройстве, управлении и защите электроприводов используются различные схемы и средства для их нормальной эксплуатации, без которых нельзя обойтись. На принципиальной электрической схеме устройства управления, проводники и преобразователи характеризуются сопротивлением и, соответственно, затратами энергии на выполнение тех или иных функций. Поэтому совершенствование функционала, разработка энергосберегающих средств или повышение энергетической эффективности направлены на достижение цели работы, что выражается условием
Wсущ>Wразраб, (2.40)
гдеWсущ и Wразраб – энергопотребление существующих и разрабатываемых технических средств, кВт*ч.
Рассмотрим несколько вариантов снижения энергопотребления в электрифицированных дождевальных машинах, работающих как на постоянном, так и на переменном токе.
2.4.2Разработка устройства динамической компенсации реактивной мощности электродвигателей
Дождевальные машины, работающие в условиях эксплуатации, оптимальных для систем энергоснабжения с источниками переменного тока (переносной генератор, кабельная линия и т.п.), комплектуются электродвигателями переменного тока. Они характеризуются потреблением как активной так и реактивной мощности, что выражается показателем cos φ (коэффициент мощности). Реактивная мощность затрачивается на создание магнитного поля. В источниках приводятся способы компенсации реактивной мощности (РМ), включение которых никак не отражается на работе двигателей. Однако это дает эффект снижения потерь электроэнергии в линиях электропередач и источника.
В ДМ с источником переменного тока (воздушная или кабельная линия, переносной генератор) применяются устройства компенсации как для электродвигателей, так и для устройств управления (магнитных пускателей). Однако эти устройства рассчитаны на номинальные режимы работы электроприемников. В динамическом режиме при пуске или других коммутационных действиях автоматики этих устройств не достаточно.
Динамический режим пуска электродвигателя (ЭД) описывается так, что в момент подачи напряжения возникает пусковой ток, в 5-7 раз превышающий номинальный, и в течение короткого промежутка времени постепенно снижается (рисунок 59).
Рисунок 59 – Осциллограмма пускового режима электродвигателя без нагрузки в программе MatLabSimulink
Такие режимы запуска наблюдаются у всех электродвигателей. Обычно ими можно пренебречь, когда электродвигатель работает в продолжительном режиме. Однако для ДМ динамический режим запусков ЭД выполняется часто, при этом ускоряется износ контактных соединений, снижается сопротивление изоляции и повышается потребление энергии.
Оценка энергопотребления пусковых режимов электропривода опорных тележек секций дождевальной машины
Особенность работы ДМ состоит в том, что электроприводы опорных тележек секций включаются в повторно-кратковременном режиме. Благодаря этому режиму можно перемещать водопроводящий трубопровод соединенных секций в виде прямой линии без излома. Ход ДМ задается режимным реле электропривода крайней секции. Продолжительность цикла в среднем составляет 100 секунд. Анализ работы ДМ, состоящей из шести секций, показал, что в течение данного цикла работы электропривода крайней секции происходит 4-7 запусков электроприводов промежуточных секций при ПВ% = 50% и 8-11 запусков – при ПВ% = 80%. Тогда общее число запусков электроприводов за 12 часов работы ДМ составит около 2-4 тыс. раз.
Пусковой режим асинхронных электродвигателей неблагоприятно воздействует на источник энергии пусковыми токами, которые в 5-7 раз превышают номинальные токи. Также продолжительность пуска может влиять на провал напряжения сети. Если ДМ имеет в качестве источника питания переносной генератор, то такие режимы увеличивают расход топлива на 8-20%, несмотря на незначительную продолжительность пуска 0,1-3,0 секунды.
В совокупности действия данных параметров: число пусков, кратность пускового тока, продолжительность пуска следует оценивать величину потребления электроэнергии переходного (динамического) режима.
Общее количество электроэнергии, потребляемое электроприводом j-ой секции ДМ, определяется в соответствии с выражением
Wj = Wнj + Wпj = Pномtрн+ wPпtп, (2.41)
где WнjиWпj – соответственно, величины энергии номинального и пускового режима, кВт*ч; Рп – пусковая мощность электродвигателя, Вт; tп – продолжительность пуска, ч; w – количество пусков; Рном – потребляемая мощность в номинальном режиме, Вт; tрн – продолжительность номинального режима, ч.
Номинальную и пусковую мощности можно записать согласно
Рном = UномIномcosφн, (2.42)
Рп = UномIпcosφп = kпускUномIномcosφп, (2.43)
где Iп,Iном – соответственно пусковой и номинальный ток, А; kпуск – кратность пускового тока; о.е.; Uном– номинальное напряжение сети, В; cosφни cosφп – соотвественно значения коэффициентов мощности в номинальном и пусковом режиме, о.е.
Оценим долю энергии на пуск
 (2.44)
(2.44)
С учетом выражений (40-41) получим
 (2.45)
(2.45)
Анализ выражения (2.45) показывает, что количество пусков в размере 2-4 тыс. раз оказывает существенное значение на потребление энергии. Для детального учета энергопотребления пускового режима рассмотрим зависимость числа и продолжительности пусков в соответствии с рабочим процессом дождевальной машины.
Определим среднее количество пусков, временные диапазоны циклов электропривода для дождевальной машины кругового действия, состоящей из 10 секций, в режимах работы электропривода крайней секции ПВ% = 100%. Повторное включение электропривода крайней секции определяет режим работы остальных электроприводов.
При ПВ% = 100% электропривод крайней секции работает непрерывно в продолжительном режиме. Продолжительность его работы определяется отношением пройденного пути на линейную скорость перемещения крайней опорной тележки.
 (2.46)
(2.46)
где j – количество секций ДМ, шт.; l – длина трубопровода одной секции, м (принято, что все секции одинаковы).
Опорная тележка предыдущей секции геометрически проходит меньший путь. При одинаковой линейной скорости опорных тележек (принято, что все электроприводы опорных тележек имеют одинаковые параметры) и движении по кругу предыдущая тележка всегда будет опережать последующую (крайнюю) тележку. Согласно настройкам электромеханического прибора синхронизации движения в линию и рекомендациям опережение в диапазоне образованного угла между продолжениями трубопроводов, рассматриваемых тележек, более чем в 2,0-2,5о, блокируется. Прибор ПСЛ отключает питание электропривода предыдущей тележки.
На основе этих данных, предыдущая опорная тележка, проезжая участок sj-1 останавливается, до тех пор, пока последующая опорная тележка ее не догонит
 (2.47)
(2.47)
где φо – предельный угол излома между продолжениями предыдущего и последующего трубопровода опорных тележек соседних секций, φо =2,0-2,5о.
Тогда можно определить количество пусков электропривода предыдущей опорной тележки
 (2.48)
(2.48)
где wj – количество пусков электропривода опорной тележки крайней секции, wj = 1 при ПВ% = 100%.
Аналогично рассчитывается число пусков других электроприводов опорных тележек промежуточных секций ДМ. Изобразим графическое решение расчета числа пусков для 10 секций ДМ при ПВ% = 100% на рисунке 60.
Рисунок 60 – Число пусков электропривода каждой секции за один полный оборот дождевальной машины to
Общее число пусков для ПВ% = 100% составит 4073…5092. При этом наблюдается малая продолжительность работы электропривода в нормальном режиме у ближайших к неподвижной опоре секций. Например, при длине трубопровода секции 59 м, линейной скорости перемещения опорной тележки 2,6 м/мин, продолжительность работы первой секции за один оборот машины составит
 (2.49)
(2.49)
Если за время движения первой секции число пусков составит 1600 раз, то продолжительность работы электропривода между паузами составит
![]() (2.50)
(2.50)
С учетом полученных данных, по выражению (2.49) доля энергопотребления на пуск для первой секции будет в несколько раз превышать потребление энергии на нормальную работу электропривода (рисунок 61).
Для каждой опорной тележки число пусков изменяется в соответствии в порядковым номером, а также будет изменяться продолжительность работы tр. С учетом этого доля затрат энергии на пуск для каждого электропривода будет индивидуальной (рисунок 62). Это зависит от продолжительности работы электропривода секции и числа пусков. За один полный оборот дождевальной машины результирующая доля энергии, потребляемая на пуск, в 200 раз превышает энергию, потребляемую в период нормальной работы.
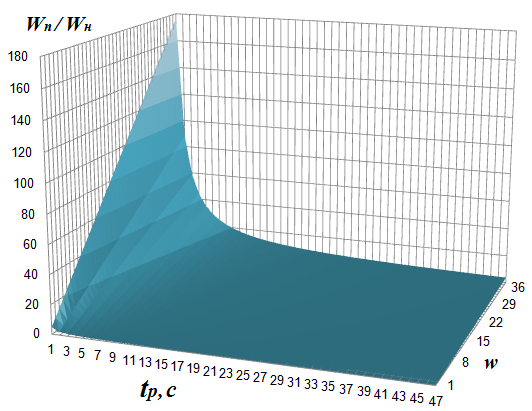
Рисунок 61 – Изменение отношения потребления пусковой энергии к энергии, потребляемой в нормальном режиме, в зависимости от числа пусков и продолжительности работы электропривода при условии: kпуск = 7; cosφн = 0,86;cosφп = 0,2; tп = 2 с
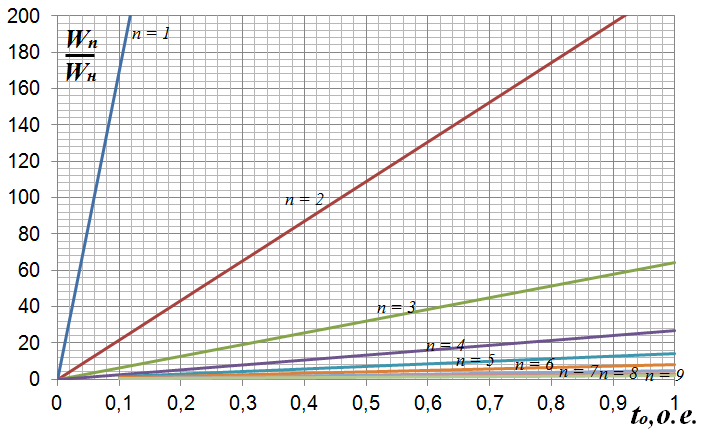
Рисунок 62 – Изменение отношения потребления пусковой энергии к энергии, потребляемой в нормальном режиме, электроприводов каждой опорной тележки ДМ, состоящей из 10 секций за один полный оборот to (о.е.) при условии: kпуск = 7; cosφн = 0,86;cosφп = 0,2; tп = 2 с
Однако повлиять на потребление энергии электродвигателя нельзя, так как его электромеханическая система имеет детерминированные значения параметров. В этом случае можно уменьшить потребление энергии технологического процесса в целом за счет снижения потерь энергии в линии.
Потери энергии в линии определяются по закону Джоуля−Ленца. В момент пуска количество энергии, потребляемой нагрузкой, можно определить согласно выражению
 (2.51)
(2.51)
где R – активное сопротивление нагрузки, включая сопротивление сети, Ом; tn – продолжительность пуска, с; I – полный ток в цепи нагрузки, А;
![]() (2.52)
(2.52)
где Ia – сила тока, обусловленная активным сопротивлением, А; где Ir – сила тока, обусловленная реактивным сопротивлением, А.
Параллельное включение конденсаторов в цепь питания электродвигателя позволяет снизить величину полного тока сети (рисунок 63). Это выполнимо при условии резонанса токов и равных реактивных проводимостей батареи конденсаторов и обмотки электродвигателя.
Рисунок 63 – Упрощенная схема замещения цепи питания электродвигателя и конденсаторной батареи от сети (RC – активное сопротивление сети, Ом; СК – емкость конденсатора, Ф;RК – активное сопротивление конденсатора, Ом; Lд – индуктивность обмотки электродвигателя, Гн; Rд – активное сопротивление обмотки электродвигателя, Ом; ХС и ХL – реактивные сопротивления, соответственно, конденсаторной батареи и обмотки электродвигателя, Ом; I, Iд, Iк – соответственно, токи сети, электродвигателя и конденсаторной батареи, А)
Доля снижения потребления энергии пусковых режимов составит
 (2.53)
(2.53)
На основе данных исследований, установлен диапазон снижения потребления энергии на пуск в 1,2-5,1 раза (рисунок 64) – на 15-80%.
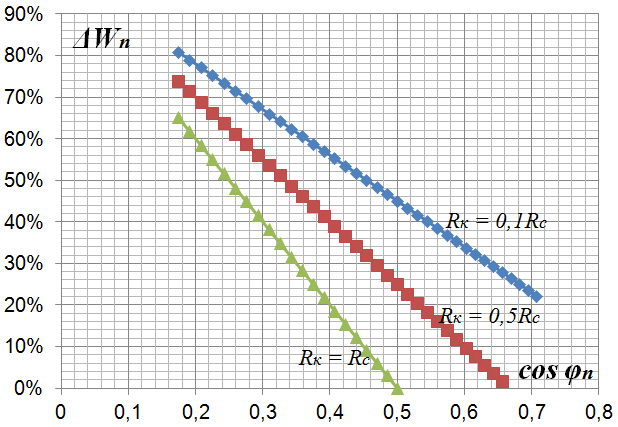
Рисунок 64 – Доля снижения потребления энергии на пуск
Таким образом, снизить влияние пускового режима на источник и общее потребление электроэнергии возможно путем разработки схем устройства динамической компенсации реактивной мощности.
2.4.3 Разработка электрических схем устройства динамической компенсации реактивной мощности
Рассмотрим устройство компенсации реактивной мощности (РМ) электродвигателей дождевальной машины в динамическом режиме. Контролировать продолжительность запуска, то есть включение и отключение устройства компенсации РМ на полярных электролитических конденсаторах можно различными способами.
Способы управления конденсаторной батареи:
— включение через реле времени с регулированием диапазона работы устройства;
— тиристорной схемой включения, реагирующей на превышение тока в цепи.
Рассмотрим включение устройства динамической компенсации с включением через тиристорную схему (рисунок 65).
Рисунок 65 – Схема включения устройства динамической компенсации реактивной мощности с помощью тиристорного пускателя (VT1-3 – тиристорный пускатель; С2-7 – полярные электролитические конденсаторы; VD1-8 – выпрямительные диоды; R1-2; С1 – балластные сопротивления схемы; ОУ – компаратор)
Чувствительным элементом схемы является маломощный понижающий трансформатор Т1, выводы которого подключены к двум любым фазам, питающих электродвигатель. При номинальном значении тока в фазах вся мощность во вторичной обмотке трансформатора Т1 преобразуется в резисторе с сопротивлением R1. При пусковом токе двигателя компаратором формируется импульс выходного напряжения на сопротивлениях RC и RD, которые рассчитаны на падение напряжения, позволяющее подать сигнал на управляемый вывод тиристорного пускателя.
Также рассмотрим схему включения устройства динамической компенсации реактивной мощности через реле времени (рисунок 66).
Рисунок 66 – Схема включения устройства динамической компенсации реактивной мощности с помощью реле времени с задержкой отсечки по установленному значению (КМ1, КМ1.1-1.3 – катушка и контакты магнитного пускателя; КТ1, КТ1.1 – реле времени и его размыкающий контакт)
Представленные схемы включения динамической компенсации обладают разными свойствами энергопотребления
WVT = bсхWKT, (2.54)
где bсх – коэффициент соотношения схем управления включения устройства динамической компенсации реактивной мощности (УДКРМ), для рассматриваемых вариантов b = 1,7-2,1.
Тогда затраты энергии пусковых режимов можно снизить
 (2.55)
(2.55)
где WПб – затраты энергии пусковых режимов без устройства компенсации, кВт*ч.
Таким образом, устройство динамической компенсации реактивной мощности позволяет снизить действие пусковых токов на источник электроэнергии и позволит снизить затраты энергии на запуск на 14,5-80,4%, а общие затраты энергии на 8,1-36,2%. Более подробно исследуем это далее.
2.4.4. Разработка схемы логического управления движением дождевальной машины, исключающей одновременный запуск электродвигателей
Движение дождевальной машины выполняется дискретно по секциям. При включении электропривода опорной тележки крайней (последней) секции движение других опорных тележек подстраивается так, что при перемещении последующей опорной тележки секции от нормали более чем на угол φо,при длине трубопровода секции l, автоматически включается питание электропривода опорной тележки предыдущей секции (рисунок 67).
 |
 |
| а) | б) |
Рисунок 67 – Дискретное движение секций ДМ
а) перемещение последующей секции; б) перемещение предыдущей секции
Соблюдение движения в линию выполняет прибор ПСЛ, принцип работы которого состоит в контроле угла φо и включении/отключении питания электропривода. Такое дискретное управление приводит к случаям одновременного запуска нескольких электроприводов опорных тележек (3-5 и даже всех секций). Тогда картина нагрузочной характеристики источника в некотором промежутке времени имеет вид (рисунок 68).
Данный режим приводит к тому, что для автономных источников питания, таких как АКБ или переносной генератор, требуется выполнение условия по выбору мощности
РИmax (ti) <РНmax (ti), (2.56)
где РИmax (ti) и РНmax (ti) – максимальные мощности, соответственно, источника электроэнергии и нагрузки в момент времениti, кВт.
Рисунок 68 – Нагрузочная характеристика источника электрической энергии
Выполнение условия (2.56) приводит к тому, что при выборе источника энергии требуется закладывать большую мощность, чтобы удовлетворять нагрузке в каждый момент ее действия, то есть с запасом. Вместе с этим сложение нагрузок секций приводит к совокупному показателю потерь энергии, что можно избежать путем использования логической схемы поочередного включения электроприводов. Тогда общее количество энергии с логической схемой
Wлог = W – WСП, (2.57)
где WСП – совокупные потери энергии при одновременном включении электроприводов, кВт*ч.
Использование логической схемы позволит снизить негативное влияние наложенных друг на друга пусков ЭД на источник, например, ДМ с переносным генератором, и исключить перерасход топлива при стабилизации работы двигателя внутреннего сгорания с генератором.
В логической схеме, представленной на рисунке 69, дополнительный контакт будет исключать одновременный пуск электродвигателей, что приведет к увеличению продолжительности выполнения полива, так как логическая остановка крайней тележки уже не будет контролироваться реле-задатчиком продолжительности включения ПВ%.
Рисунок 69 – Логическая схема управления движением опорных тележек секций ДМ(Uупр – напряжение цепи управления, KM1,…,j – катушки цепи управления; S1…j – переключатели; KM1.1-1.3,…j.1-j.3 – главные контакты контакторов; М1,…,j – электродвигатели)
Временная диаграмма логической схемы представлена на графике U(t) (рисунок 70).

Рисунок 70 – Временная диаграмма логической части схемы управления движением секций ДМ
Минимальная продолжительность выполнения полива ТДМmin без логической схемы определяется по промежутку времени работы электропривода опорной тележки крайней j-ой секцииtрп
ТДМmin = tрj. (2.58)
С логической схемой управления продолжительность работы ДМ будет ориентирована на продолжительность работы каждого электропривода в отдельности, как на рисунке 2.39:
![]() (2.59)
(2.59)
Если скорость перемещения опорных тележек одинакова, то продолжительность оборота крайней секции относительно первой секции составит
tpj = jt1. (2.60)
Тогда доля увеличения продолжительности работы ДМ с логической схемой управления с количеством секций, равнымj, составит
 (2.61)
(2.61)
Из выражения (2.57) для ДМ, состоящей из 10 секций, продолжительность работы с логической схемой управления увеличится в 5,5 раз. Такое положение требует регулирования поливной нормы, так как при большем простое отдельные участки будут в большей степени залиты водой.
Мощность источника энергии без логической схемы оценивается суммой мощностей каждого потребителя на вероятность его одновременного включения
![]() (2.62)
(2.62)
где Bi(t) – вероятность одновременного включения i-ой секции; Рj, Pj-1, …, P1 – электрическая нагрузка (мощность электродвигателя и устройств автоматики и управления) секций, начиная с крайней, кВт.
Вероятность одновременного включения в работу всех электроприводов можно определить по длине трубопровода секции и длине окружности, пройденного пути каждой тележкой. Изобразим длину пройденного пути каждой опорной тележкой в виде прямой линии (рисунок 71).
Рисунок 71 – Сравнение длин, пройденного пути опорных тележек ДМ
Согласно геометрическим параметрам движения и теории математической статистики вероятность можно определить по выражениям
 (2.63)
(2.63)
С учетом вероятности события – движение ДМ в виде прямой линии (нормали) и скоростных характеристик опорных тележек, вероятность одновременной работы всех электроприводов легко определить. Результаты расчета вероятности сведем в таблицу 2.
Таблица2 – Результаты расчета вероятности одновременного запуска электроприводов при количестве секций j = 10
| Двух | Трех | Четырех | Пяти | Шести | Семи | Восьми | Девяти | Десяти | |
| Вi(t) | 0,9 | 0,8 | 0,7 | 0,6 | 0,5 | 0,4 | 0,3 | 0,2 | 0,1 |
На основе данных таблицы с вероятностью 0,1 существует возможность запуска всех электроприводов одновременно. Поэтому при выборе источника питания, например, переносного генератора, требуется учитывать данные вероятности.
Применение логической схемы управления, исключающей одновременную работу электроприводов, позволит получить
![]() (2.64)
(2.64)
На основе этих данных определим возможный диапазон снижения энергозатрат для переносного генератора с логической схемой управления.
Примем, что переносной генератор без логической схемы управления имеет мощность РИГ, который при ПВ 100%, обеспечивает энергией дождевальную машину за один полив в течение промежутка времени tpj
![]() (2.65)
(2.65)
Для ДМ с логической схемой управления движением, требуется генератор, мощность которого определяется как
![]() (2.66)
(2.66)
где j – количество опорных тележек (секций).
Тогда потребление энергии ДМ с логической схемой составит
 (2.67)
(2.67)
С учетом (2.66), доля снижения энергии при использовании логической схемы управления (рисунок 72)составит
 (2.68)
(2.68)
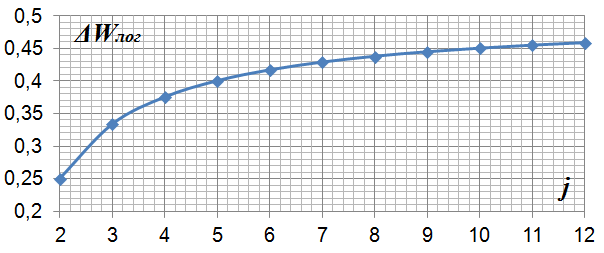
Рисунок 72 – Зависимость снижения энергозатрат от числа опорных тележек (секций) ДМ с использованием логической схемы управления
Таким образом, использование логической схемы управления для источника в виде переносного генератора приводит к экономии 25,2-48,8% электроэнергии.
2.4.5 Разработка устройства пространственного положения роботизированного оросительного комплекса
Прибор синхронизации движения в линию как электромеханическое устройство управления имеет чувствительный элемент в виде рычага, который отклоняясь на определенный угол φо, механически воздействует на концевой выключатель катушки магнитного пускателя электродвигателя (рисунок 73).
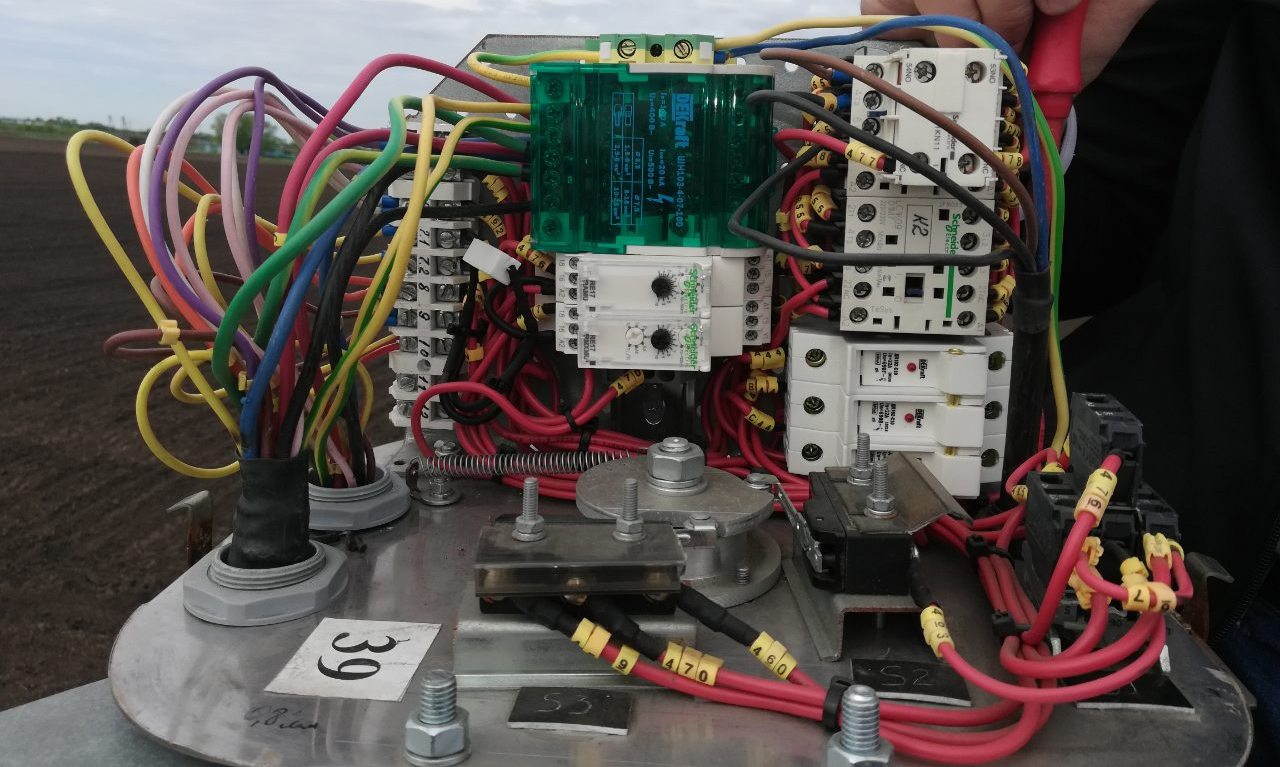
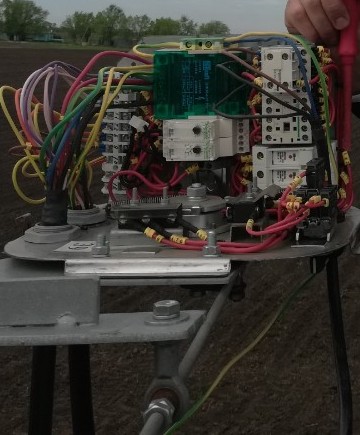
2
1
1
а)б)
Рисунок 73 – Общий вид прибора синхронизации движения в линию
1 – концевой выключатель; 2 – рычаг (чувствительный элемент)
Сложность настройки работы ПСЛ заключается в регулировании диапазона хода рычага, который имеет расстояние 1…5 мм из-за соотношения длины водопроводящего трубопровода последующей секции к длине рычага с соблюдением угла отклонения от нормали (φо = 2-2,5о). Энергетические затраты на ПСЛ определяются данными концевого выключателя
WПСЛ = U1It = I2Rквt, (2.69)
где Rкв – сопротивление концевого выключателя, Ом; t – продолжительность замкнутого состояния контакта концевого выключателя, с.
Если рассмотреть устройство, которое выполняет такую же функцию, но на более низком энергетическом уровне, например, при более низком напряжении
U2<U1, (2.70)
где U2 – рабочее напряжение усовершенствованного устройства при таком же сопротивлении R2
R2 = Rкв. (2.71)
Рассмотрим устройство определения угла поворота на примере ультразвукового приемопередатчика на рисунке 74.
а)
б)
Рисунок 74 – Внешний вид устройства определения угла поворота секции ДМ
а) вид сверху; б) вид сбоку
В ходе движения двух соседних секций трубопровод искривляется в горизонтальной плоскости из-за того, что пути перемещения опорных тележек секций различны. Возникший между секциями угол контролируется для того, чтобы избежать сбоя в траектории движения и излома трубопровода.
Когда возникает угол, превышающий допустимый (φо = 2-2,5о), то изменяется расстояние между приемопередатчиком 3, закрепленным на неподвижной части 2 шарнира 1, и отражателем 6, закрепленным на подвижной части 5 шарнира 1.
Таким образом, испускаемые ультразвуковые лучи от приемопередатчика 3 отражаются от отражателя 6 и возвращаются обратно в приемопередатчик. Путь, пройденный лучами, рассчитывается и соотносится с углом между секциями. При возникновении критического значения угла выполняется остановка движения последующей секции, прикрепленной к подвижной части 5 шарнира 1. Для снижения погрешности измерения пройденного лучами пути используется изолирующий экран 4.
На данное устройство получен патент РФ на изобретение [44]. Расстояние между приемопередатчиком можно регулировать путем перемещения рычага отражателя и приемопередатчика вдоль трубопровода предыдущей секции.
Доля снижения затрат энергии от применения устройства определения угла поворота секции на ультразвуковом передатчике составит
 (2.72)
(2.72)
где U1 и U2 – номинальные напряжения, соответственно, устройства ПСЛ и ультразвукового устройства, В; R1 и R2 – эквивалентные сопротивления, соответственно, ПСЛ и ультразвукового устройства, Ом; tpП и tpУ – продолжительность работы, соответственно, ПСЛ и ультразвукового устройства, ч.
Примем допущение, что эквивалентные сопротивления сравниваемых устройств равны, то есть R1 = R2. Продолжительность работы ультразвукового приемопередатчика совпадает с продолжительностью работы всей машины, так как данное устройство должно находиться в режиме ожидания пока выполняется движение дождевальной машины. Тогда продолжительность работы ультразвукового устройства составит для одной секции
 (2.73)
(2.73)
Для всех устройств управления дождевальной машины, состоящей и j секций
 (2.74)
(2.74)
Продолжительность работы ПСЛ зависит от продолжительности работы электропривода. Для опорной тележки первой секции продолжительность работы ПСЛ составит tp1, для следующей –2tp1 и т.д.
Определим продолжительность работы всех ПСЛ и ультразвуковых устройств для дождевальной машины, состоящей из j секций
![]() (2.75)
(2.75)
Подставляя (71) и (73) в выражение (70), получим
 (2.76)
(2.76)
Полученное выражение отражает смысл применения нового устройства. Ультразвуковой приемопередатчик должен находиться в постоянном режиме ожидания, что увеличивает его продолжительность работы и, соответственно, затраты энергии. Однако данные устройства просты в обслуживании, так как при программировании одного диапазона работы приемопередатчика, не требуется его регулярная настройка. А также ультразвуковой приемопередатчик не ограничен ресурсом срабатываний, что в целом повышает надежность работы устройства управления. Как правило, ультразвуковые приемопередатчики выпускаются на низкое напряжение питания.
Рассмотрим зависимость потребляемой энергии сравниваемых устройств (рисунок 75) и долю снижение энергозатрат при использовании новых устройств управления с различным напряжением питания (рисунок 76).
На рисунке 75 показана зависимость потребляемой энергии на управление секций ДМ. Например, для машины, состоящей из 10 секций, потребляемая энергия на управление приборами ПСЛ составит 239 Вт*ч. Такая же дождевальная машина с устройствами управления на ультразвуковых приемопередатчиках потребляет от 5 до 102 Вт*ч энергии (в зависимости от напряжения питания 5, 12, 24 В), что в 2,3-47,8 раз меньше энергии, потребляемой ПСЛ.
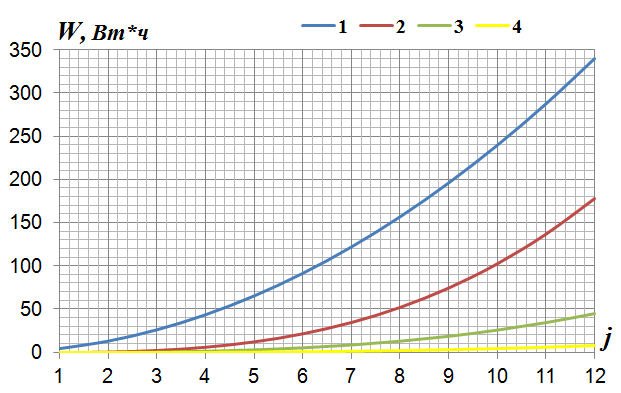
Рисунок 75 – Зависимость потребляемой энергии устройствами управления перемещением секций: 1 – прибор ПСЛ с напряжением питания 110 В; 2 – устройство определения угла поворота на ультразвуковом приемопередатчике с напряжением питания 24 В; 3 – тоже с напряжением питания 12 В; 4 – тоже с напряжением питания 5 В
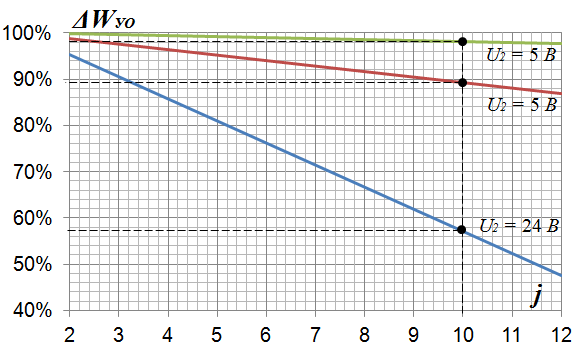
Рисунок 76 – Доля снижения энергозатрат при сравнении устройств управления на ультразвуковых приемопередатчиков, работающих на номинальном напряжении 5, 12, 24 В с электромеханическим прибором ПСЛ, работающего на номинальном напряжении 110 В
На основе полученных теоретических данных разработан образец устройства определения угла поворота, а также собран стенд в лабораторных условиях для проверки работоспособности устройства на ультразвуковом приемопередатчике (рисунки 77 и 78).
Рисунок 77 – Испытание устройства определения угла поворота на ультразвуковом приемопередатчике при угле 10о: 1 – подвижная часть шарнира; 2 — дисплей контроля расстояния; 3 – экран; 4 – неподвижная часть шарнира; 5 – отражатель; 6 – ультразвуковой приемопередатчик HCSR-04 (Arduino)
Рисунок 78 – Испытание устройства определения угла поворота на ультразвуковом приемопередатчике при угле 5о: 1 – подвижная часть шарнира; 2 — дисплей контроля расстояния; 3 – экран; 4 – неподвижная часть шарнира; 5 – отражатель; 6 – ультразвуковой приемопередатчик HCSR-04 (Arduino)
Таким образом, использование данного устройства определения угла поворота позволяет снизить затраты энергии на управление в 2,34-47,8 раз, что в структуре общих затрат составляет порядка 0,2-2,1%. Вместе с этим сократится продолжительность наладки системы управления по сравнению с ПСЛ.
3. ПРОЕКТ РОБОТИЗИРОВАННОГО ОРОСИТЕЛЬНОГО КОМПЛЕКСА С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ И СИСТЕМОЙ ЭНЕРГОСНАБЖЕНИЯ С ВОЗМОЖНОСТЬЮ ОРГАНИЗАЦИИ СЕРИЙНОГО ПРОИЗВОДСТВА В САРАТОВСКОЙ ОБЛАСТИ
Разрабатываемый роботизированный оросительный комплекс с интеллектуальной системой управления предназначен для полива дождеванием кормовых, зерновых и технических культур, включая высокостебельные.
3.1 Основные технические характеристики
Таблица 3 –Основные технические характеристики
| Параметры | Значения |
| Орошаемая площадь | 80,4 га |
| Расход воды | 62,35 л/с (231,66м3/ч) |
| Рабочее давление на входе в машину | 0,39МПа |
| Гидромодуль | 0,8 л/с/га |
| Радиус захвата дождем | 505,75 м |
| Длина оросительного комплекса | 480,75м |
| Радиус колеи последней тележки | 456,75м |
| Скорость движения последней тележки | 138,46 м/час |
| Минимальная продолжительность полного оборота | 20,73 ч |
| Норма полива за один проход (оборот) | от 60 до 664м3/га |
| Диаметр стояка неподвижной опоры | 219 мм |
| Диаметр водопроводящего трубопровода | 159 |
| Число пролетов в машине | 7 шт |
| Длина пролета | 65,25 м |
| Клиренс шпренгельной фермы | 2,70±0,05 м |
| Уклон поля вдоль трубопровода машины | до 8% |
| Уклон поля по ходу движения тележек | до 8% |
| Общий уклон поля | до 7% |
| Длина консольного трубопровода | 24м |
| Модель концевого аппарата | R25S |
| Радиус действия концевого аппарата | 25м |
| Расход концевого аппарата | 4,36л/с |
| Расстояние между водовыпусками | 2,9 м |
| Число дождевальных насадок | 152 шт. |
| Диаметр капель искусственного дождя | 0,8-1,0 мм |
| Радиус действия дождевальных насадок | 6м |
| Число скоростных режимов машины | 92 |
| Потребляемая мощность | 4,6 кВт |
| Солнечные панели | 4 шт. на 1 секцию |
| Аккумуляторные батареи | 8 шт. на 1 секцию |
| Требуемая мощность источника электроэнергии | не менее 10 кВт |
| Допустимая температура окружающего воздуха | от 5 до 45 °С |
| Сухая масса машины | 16150 кг |
3.2 Общее устройство
Роботизированный оросительный комплекс (рисунок 79) включает электрифицированную дождевальную машину 1, работающую в движении по кругу, путем перемещения водопроводящего трубопровода 2 с дождевальными насадками 3 вокруг неподвижной опоры 4.
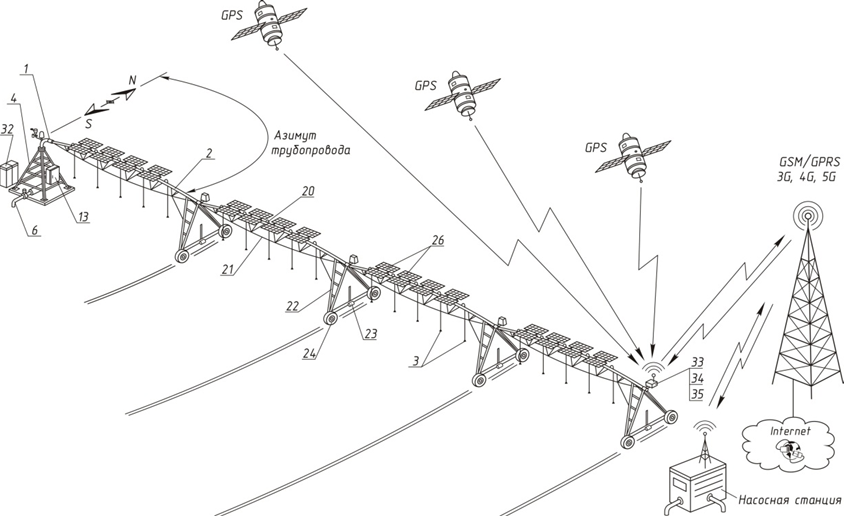
Рисунок 79 − Основные конструкционные элементы оросительного комплекса
Вода к стояку 5 неподвижной опоры 4 (рисунок 80) подается от трубопровода закрытой оросительной сети 6 через регулятор давления 7, фильтр 8 и электрическую задвижку 9, которая автоматически управляется с помощью электрических сигналов, поступающих от машины 1.
Водопроводящий трубопровод 2 шарнирно соединен с поворотным коленом 10, которое образует с обоймой 11 упорный подшипник, обеспечивающий возможность перемещения трубопровода 2 вокруг неподвижной опоры 4. Для передачи электроэнергии и управляющих сигналов с неподвижной опоры 4 на подвижную часть машины 1, на поворотном колене 10 установлен электрический кольцевой коллектор 12. Неподвижная опора оснащена щитом управления 13, сигнальным фонарем 14 и метеостанцией 15, содержащей термометр 16, гигрометр 17, анеморумбометр 18 и дождемер 19.
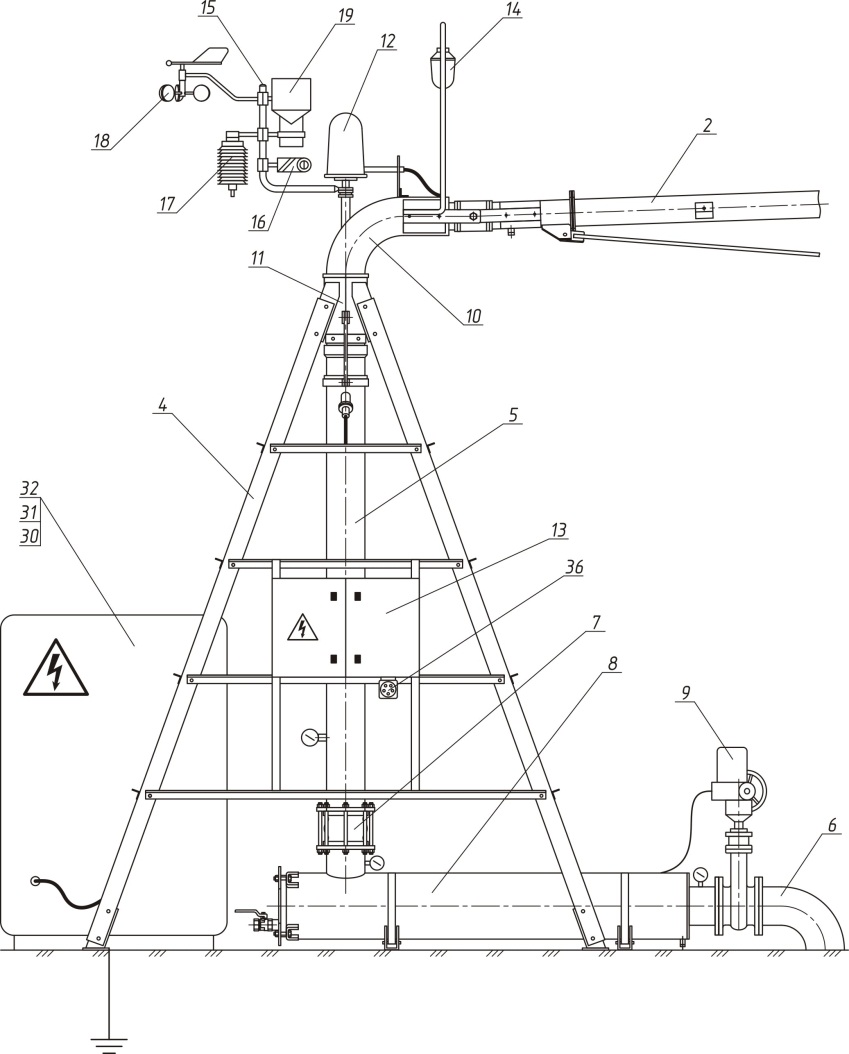
Рисунок 80 − Неподвижная опора оросительного роботизированного комплекса
Водопроводящий трубопровод 2 дождевальной машины 1 образован из последовательно шарнирно соединенных пролетов 20 (рисунок 81), каждый из которых содержит шпренгельную ферму 21, размещенную одним концом на самоходной тележке 22 с электроприводом 23 и пневмоколесами 24 (рисунок 82).
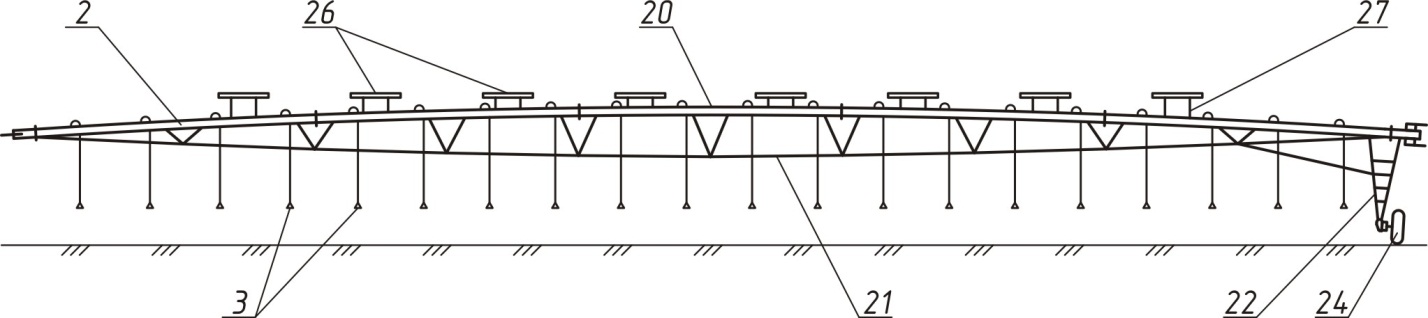
Рисунок 81 − Пролет оросительного комплекса
Рисунок 82 − Ходовая тележка
На самоходных тележках установлены с возможностью принудительного погружения на различную глубину плодородного слоя датчики влажности почвы, что позволяет измерять влажность почвы на необходимой глубине в момент простоя машины 1. Перед началом движения дождевальной машины 1 датчики влажности почвы принудительно извлекаются из грунта.
Обеспечение дождевальной машины 1 электроэнергией осуществлено от солнечных батарей 26 (см. рисунок 79), которыми оснащается каждый из пролетов 20, что позволяет увеличивать генерируемую мощность с ростом числа пролетов 20 в машине 1. Солнечные батареи 26 при помощи кронштейнов 27 закреплены над водопроводящим трубопроводом 2 пролета 20и расположены в одной горизонтальной плоскости. При таком положении все солнечные батареи будут обладать одинаковым потенциалом для выработки электроэнергии, а также будет исключено отбрасывание теней на их рабочую поверхность от конструкционных элементов машины. Солнечные батареи 26 объединены по последовательно-параллельной схеме в единую электрическую цепь, которая соединена через контроллер с трехфазным инвертором и с основной и резервной аккумуляторной батареей 30 и 31, размещенными в шкафу 32, установленным на фундаменте рядом с неподвижной опорой 4. Соединение солнечных батарей 26 по последовательно-параллельной схеме позволяет повысить напряжение в сети с увеличением тока. Для энергоснабжения силовой и управляющей электросетииспользуется трехфазный инвертор,который преобразует постоянный ток в переменный с изменением величины напряжения. Использование резервной аккумуляторной батареи 31 для энергообеспечения дождевальной машины 1, позволяет увеличить время безостановочной работы машины 1, а также, не прекращая ее работы, производить заряд основной батареи 30.
Для управления процессом полива дождевальная машина 1 оснащена бортовым компьютером 33, установленным в верхней части крайней тележки 22. С целью осуществления мониторинга и дистанционного управления оросительным комплексом бортовой компьютер 33 оснащен модемом 34 с резервным каналом связи, обеспечивающим передачу данных через сеть интернет по радиоканалу. Также бортовой компьютер 33 снабжен приемником сигналов GPS/ГЛОНАСС 35 для определения азимута трубопровода 2 машины 1 в режиме реального времени. Бортовой компьютер 33 на основании сбора и анализа данных, поступающих от метеостанции 15 и датчиков влажности почвы 25, корректирует график поливов и поливные нормы.
Для использования электроэнергии, вырабатываемой во время простоя машины 1, на неподвижной опоре 4 дополнительно установлен электрический соединитель 36.
С целью увеличения аккумулирующей мощности дождевальная машина 1 может быть снабжена несколькими резервными аккумуляторными батареями 31, размещенными в модульных шкафах 32.
На крайней тележке 22 может быть дополнительно установлен электрический соединитель 36, обеспечивающий возможность использования электроэнергии, вырабатываемой во время простоя машины 1.
Параметры привода самоходных тележек оросительного роботизированного комплекса представлены в таблице 4.
Таблица 4−Параметры привода самоходных тележек
| Параметры | Значения |
| Модель мотор-редуктора | UMC Power Saver 3,5PSG35-40 |
| Передаточное отношение мотор-редуктора | 40:1 |
| Модель червячного редуктора | UMC 740-UV |
| Передаточное отношение червячного редуктора | 52:1 |
| Крутящий момент на валу червячного редуктора | 8,473 кНм |
| Модель муфты приводного вала | UMC CX-1 |
| Шины высокой проходимости | 14,9R24 |
| Норма слойности шин | не менее 8 |
| Индекс грузоподъемности шин | не менее 128 |
| Размер колесного диска | W12х24 |
| Давление в шинах | 1,5 бар |
Разрабатываемая интеллектуальная система мониторинга и управления поливным комплексом (ИСМУПК) предназначена для слежения и автоматического управления поливным комплексом в заданных параметрах.
ИСМУПК обеспечивает контроль функционального состояния и управление работой роботизированной оросительной техники и насосной станцией с передачей всей собранной информации на АРМ оператора, с последующей обработкой, анализом и архивированием полученных данных.
Реализация ИСМУПК, выполненной на базе программируемого логического контроллера отечественного производства, позволяет обеспечить своевременный полив орошаемых площадей с внесением необходимых удобрений и пестицидов, согласно заданного алгоритма, передавать данные на АРМ оператора, контролировать расход воды, контроль уровня топлива в генераторной установке и прочие параметры.
В состав разрабатываемой интеллектуальной системы мониторинга и управления орошением (поливным комплексом) входит:
— роботизированные оросительные комплексы, оборудованныев том числе насосами-дозаторами для внесения удобрений, расходными емкостями для их хранения;
-система интеллектуального управления комплексами;
-модуль управления насосной станцией;
— АРМ оператора с программно-техническим комплексом (ПТК), расположенным в операторной;
— метеостанция для контроля и прогнозирования метеоусловий;
-беспроводные автономные датчики контроля параметров орошения.
Автоматическая работа комплекса обеспечиваться системой управления электродвигателем и системой синхронизации опорных тележек в линию.
Система управления электроприводом обеспечивает следующие режимы работы машины:
— ручное управление — выбор направления движения комплексом, задание продолжительности включения электродвигателя крайней самоходной тележки, пуск и остановка электродвигателей;
— дистанционное управление — пуск и остановка электродвигателей самоходных тележек, контроль параметров орошения.
Согласованное действие систем управления электроприводом, системы синхронизации в линию, а также приборов управления автоматически обеспечивают следующие режимы:
-остановку комплекса в заранее заданном оператором месте;
-синхронизацию движения самоходных тележек в линию;
— аварийную остановку комплекса при недопустимых выбегах самоходных тележек;
-остановку комплекса при снижении на 0,1 МПа (1,0 кгс/см2) и увеличении на 0,15 МПа (1,5 кгс/см2 от номинального) давления воды на входе в машину;
— остановку комплекса при отсутствии движения предпоследней самоходной тележки более 10 мин;
-остановку комплекса при превышении предельного числа оборотов токосъемника.
Система интеллектуального управления электроприводом комплекса выдает сигналы на запорную арматуру внешней оросительной сети и пульт дистанционного управления оросительной сети, имеет индикацию на панели щита управления о месте срабатывания защиты по недопустимым выбегам самоходных тележек.
Система интеллектуального управления может включать модуль управления, представляющий собой металлический антивандальный шкаф, в котором смонтированы контроллер, GPRS модем и пусковая арматура. В комплект системы интеллектуального управления входит метеостанция, датчики уровней топлива в генераторной установке и реагентов в емкостях, беспроводные автономные датчики влажности орошаемой почвы, счетчик воды, которые устанавливаются в зоне работы машины и другие элементы контроля за параметрами орошения.
Контроллер производит опрос состояния системы управления машиной, информации с датчиков, аварийных сигналов с машины, генератора электроэнергии, анализирует ее, и при необходимости запускает генератор, а затем и машину, добавляя в воду необходимые ингредиенты, передает информацию по GPRS каналу в операторную. Также ведется учет расходуемой воды, остатков топлива генератора, уровня реагентов в расходных емкостях.
АРМ и программно-технический комплекс состоит из сервера, GPRS модема и программного обеспечения собственной разработки. Вся поступающая информация с роботизированных оросительных комплексов архивируется на сервере с возможностью построения графиков и трендов различных процессов.
На мониторе компьютера отображается карта контролируемой области с указанием места нахождения дождевальных машин и их функционального состояния. При клике мышкой по пиктограмме интересующей дождевальной машины открывается окно с подробной информацией о состоянии машины, метеоусловий, влажности почвы, запасов реагентов, топлива в генераторе.
Здесь же имеется возможность откорректировать алгоритм автоматической работы контроллера, а также управлять машиной в ручном дистанционном режиме, задать график добавления реагентов в воду при поливе.
Заложена возможность настройки смс-оповещения на мобильные телефоны обслуживающего персонала. Возможна разработка мобильных версий приложения для двух популярных операционных систем.
Зависимость выдаваемой нормы полива от режима установки таймера представленав таблице 5.
Таблица 5– Характеристика режимов работы
| Режим движения, ПВ % | Установка таймера, с | Норма полива, м3/га | Время полного оборота, час | |
| импульс | пауза | |||
| 9 | 9 | 91 | 664 | 230,3 |
| 10 | 10 | 90 | 598 | 207,3 |
| 11 | 11 | 89 | 543 | 188,4 |
| 12 | 12 | 88 | 498 | 172,7 |
| 13 | 13 | 87 | 460 | 159,4 |
| 15 | 15 | 85 | 398 | 138,2 |
| 17 | 17 | 83 | 351 | 121,9 |
| 20 | 20 | 80 | 299 | 103,6 |
| 24 | 24 | 76 | 249 | 86,4 |
| 30 | 30 | 70 | 199 | 69,1 |
| 40 | 40 | 60 | 149 | 51,8 |
| 61 | 60 | 40 | 100 | 34,5 |
| 100 | Непрерывный ход | 60 | 20,7 | |
Роботизированный оросительный комплекс работает следующим образом.При нахождении дождевальной машины в простое ее бортовой компьютер 33 переводится в энергосберегающий режим, продолжая при этом поддерживать связь по радиоканалу с сетью интернет при помощи модема 34. Также по мере необходимости производится зарядка аккумуляторных батарей 30 и 31 за счет электроэнергии, вырабатываемой солнечными батареями 26.
В начале поливного сезона в память бортового компьютера 33 по сети интернет загружаются данные по режиму орошения, содержащие график поливов, поливные нормы, а также эрозионно допустимые нормы.
Перед началом полива бортовой компьютер 33 дает команду для извлечения датчиков влажности почвы из грунта, затем по сети интернет передается команда для запуска насосной станции. После того как в трубопроводе закрытой оросительной сети 6 (см. рис. 3.2) установится требуемое давление, бортовой компьютер 33 подает управляющий сигнал для открытия электрической задвижки 9 и вода, проходя через фильтр 8 и регулятор давления 7, поступает в полость трубопровода 2, и разбрызгивается с помощью дождевальных насадок 3 по поверхности орошаемого участка. Дождевальная машина осуществляет полив в движении по кругу, для чего при помощи самоходных тележек 22, оснащенных электроприводом 23, происходит перемещение пролетов 20 с водопроводом 2 и дождевальными насадками 3 вокруг неподвижной опоры 4. Процесс полива может осуществляться в один или более проходов (оборотов) дождевальной машины, при этом выдаваемая за проход поливная норма не должна превышать эрозионно-допустимых норм.
После подачи напряжения в силовую сеть начинает мигать сигнальный фонарь 14, предупреждающий о нахождении дождевальной машины 1 в рабочем состоянии.
Размещение бортового компьютера 33, оснащенного приемником сигналов GPS/ГЛОНАСС 35, на крайней тележке 22 позволяет определять азимут трубопровода 2 машины в режиме реального времени и посредством передачи данных о ходе процесса полива по сети интернет осуществлять дистанционный мониторинг за работой оросительного комплекса.
Энергообеспечение оросительного комплекса осуществлено за счет электроэнергии вырабатываемой солнечными батареями 26. При этом солнечные батареи, благодаря их размещению в одной горизонтальной плоскости на каждом пролете, обладают одинаковым потенциалом для выработки электроэнергии вне зависимости от положения трубопровода 2 относительно солнца. При снижении уровня генерации электроэнергии солнечными батареями 26 ниже требуемого, контролер 28 переключает электропитание дождевальной машины на основную аккумуляторную батарею 30. При полном разряде основной аккумуляторной батареи 30 контролер 28переводит дождевальную машину на электропитание от резервной аккумуляторной батареи 31, одновременно с этим основная аккумуляторная батарея переключается контроллером 28 в режим подзарядки от солнечных батарей 26. Таким образом, использование одной или нескольких резервных аккумуляторных батарей позволяет увеличить время безостановочной работы машины, а также, не прекращая ее работы, производить заряд основной батареи 30.
По окончанию полива бортовой компьютер 33 подает управляющий сигнал для закрытия электрической задвижки 9, а затем, с использованием модема 34, передает по сети интернет команду для остановки насосной станции. После чего контроллер 28 отключает питание силовой сети.
По истечению определенного времени после полива датчики влажности почвы автоматически погружаются на необходимую глубину. Измерение влажности почвы производится в межполивной период, когда машина находится в простое. При необходимости можно производить измерения влажности почвы на разных глубинах плодородного слоя за счет изменения глубины погружения датчиков влажности почвы.
С помощью дождемера 19, входящего в состав метеостанции 15, регистрируется объем и давность атмосферных осадков.
На основании анализа данных, поступивших от датчиков влажности почвы и дождемера 19, бортовой компьютер 33 принимает решение о необходимости корректировки поливных норм для следующего полива, либо об изменении графика поливов. Например, если перед поливом влажность почвы находиться на достаточно высоком уровне, то бортовой компьютер 33 принимает решение о переносе полива на более позднее время, или если недавно прошли обильные атмосферные осадки, то компьютер 33 с учетом их объема корректирует поливную норму для последующего полива.
На основании данных, получаемых от остальных датчиков метеостанции 15 – термометра 16, гигрометра 17 (влажность воздуха) и анеморумбометра 18 (скорость ветра) определяются потери искусственного дождя на испарение и снос дождевого облака ветром, данные потери компенсируются корректировкой выдаваемой поливной нормой в большую сторону бортовым компьютером 33.
В зависимости от требуемой нормы полива и с учетом эрозионно-допустимых поливных норм бортовым компьютером определяется число проходов за полив и рассчитывается требуемая для данных условий скорость передвижения дождевальной машины по участку.
Установленный на неподвижной опоре 4 щит управления 13 служит для перевода машины на ручное управление и устранения аварийных ситуаций.
Для использования электроэнергии, вырабатываемой солнечными батареями 26 в период межсезонья или во время простоя машины, на неподвижной опоре 4 установлен электрический соединитель 36. Установка дополнительного электрического соединителя 36 на крайней тележке 22, в тех же целях, позволяет за счет разворота машины в нужном направлении сократить расстояние до потребителя электроэнергии.
Предлагаемое изобретение [44] позволит повысить уровень автоматизации и автономности роботизированного оросительного комплекса, обеспечит экономное расходование энергетических и водных ресурсов, а также повысит эффективность электропитания дождевальной машины от солнечных батарей.
3.3 Этапы создания роботизированного оросительного комплекса
Этапы создания включали в себя этап исследовательских работ и поисково-прикладных исследований, опытно-конструкторских работ (чертежи конструкции, опытных образцов, элементов конструкций, образец машины), рисунки 83 и 84.
На этапе освоения производства были разработаны: кондукторы для изготовления водопроводящего трубопровода, обеспечивающие точность размеров и пространственную ориентацию элементов креплений, водоотводов, фланцев, а для изготовления опорных тележек, обеспечивающие точность установки редукторов, необходимые углы наклона балок и др. (рисунки 85-91).








Рисунок 83 – Элементы конструкции



Рисунок 84 – Экспериментальный стенд



Рисунок 85 – Кондуктор изготовления водопроводящего трубопровода

Рисунок 86 – Стенд для изготовления ходовой тележки


Рисунок 87 – Кондуктор изготовления опорных тележек


Рисунок 88 – Монтаж фермы






Рисунок 89 – Монтаж машины в полевых условиях
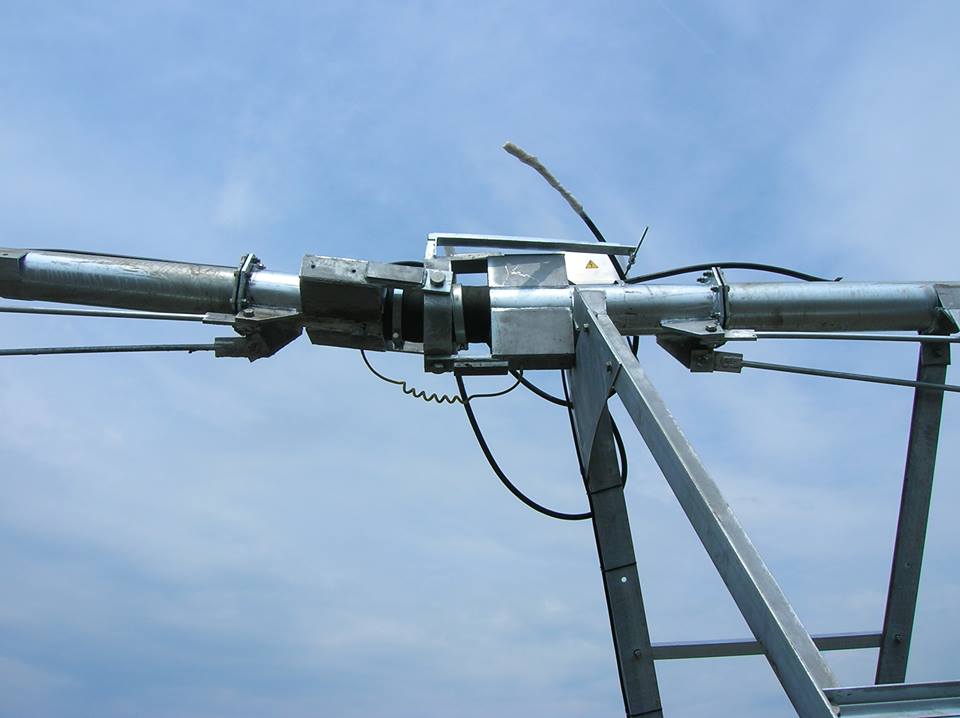

Рисунок 90 – Элементы конструкции оросительного комплекса

Рисунок 91 – Оросительный пояс
Для проверки и испытания щита управления ЩУ-001.2, приборов управления и контроля прямолинейности ПСЛ 1…10 дождевальной машины кругового действия были использованы лабораторные приборы – имитаторы ЛП-01.1, ЛП-01.2, ЛП-01.3 и ЛП-01.4 (рисунки 92-95).
С их помощью в лабораторных условиях проверялась работоспособность всех элементов автоматики и схемы соединения. Они обеспечивали подачу входных сигналов на контакты устройств управления от тумблеров с панели управления имитатора.Обеспечивали визуальную проверку срабатывания реле устройств защиты по индикации их состояния при помощи светодиодов на панели управления.
Программное обеспечение создано с помощью свободно распространяемой среды программированияOWENLogic,предназначенной для создания алгоритмов работы коммутационных приборов, относящихся к классу программируемых реле.
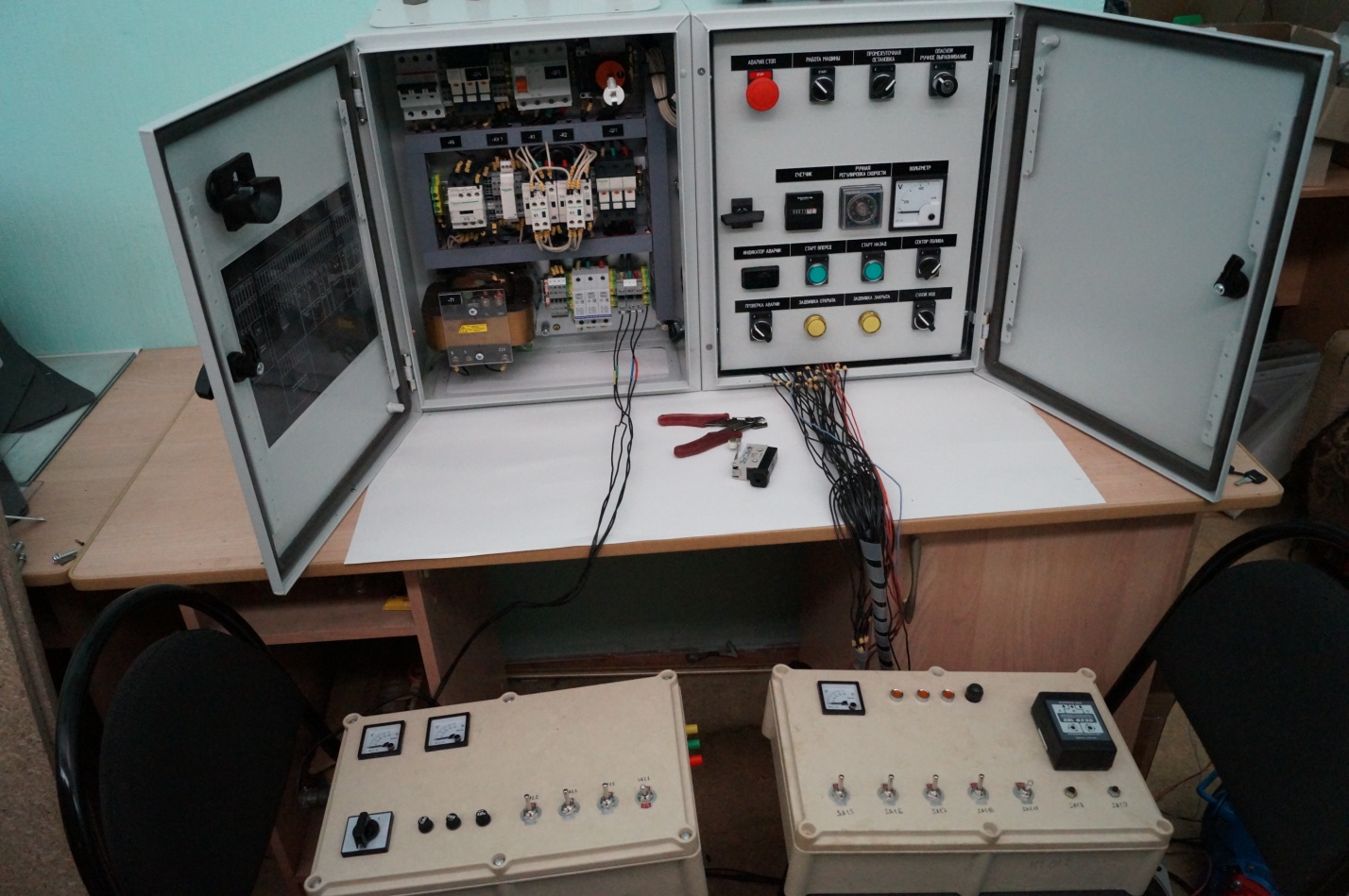

Рисунок 92 – Лабораторные приборы для проверки и испытания системы автоматизации и управления


Рисунок 93 – Лабораторные приборы для настройки ПСЛ


Рисунок 94 – Щит управления
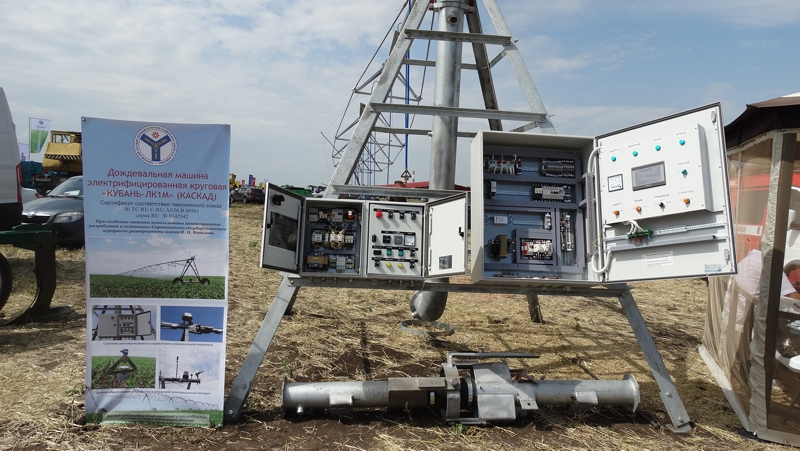
Рисунок 95 – Главный щит управления
3.4 Система автоматизации
Для обеспечения управления машиной была разработана собственная автоматическая система управлением со следующими опциями.
Автоматический останов при круговом режиме работы (рисунки 96 и 97), создаваемый выключением машины в определённом желаемом положении (парковочное положение).
Секторное управление с реверсивной автоматикой– автоматический останов в конце сектора со сменой режима работы.
Машина автоматически отключается по достижению границы сектора, возможен полив сектора неограниченное число раз без перерыва, отключение после выполнения желаемого количества циклов полива.
Концевой останов – реверсивная автоматика.
Отключение при низком давлении.
Давление на входе в машину контролируется с помощью реле давления. Если давление ниже заданного минимального значения, машина автоматически отключается.
Рисунок 96– Стандартные компоненты щита управления
Переключатель в положении «без полива» деактивирует реле давления.
Функция применима, чтобы направить машину на место стоянки в случае дождя и отсутствия необходимости в дальнейшем поливе.
Автоматическое отключение насосного агрегата. При остановке или неисправности машины происходит автоматическое отключение агрегата в том случае, если он соединен со шкафом управления.
Автоматическое управление электрическим запорным клапаном.
Электрический запорный клапан в подводящей трубе на центральной опоре автоматически перекрывает подачу водыв режиме ручного управления и автоматически − при сбое в работе машины.
Контроль хода.
Если машина оснащена опцией «контроль хода», то через определенное – заданное время при буксировке колес последней опоры машина автоматически отключается, чтобы предотвратить чрезмерный полив.
 |
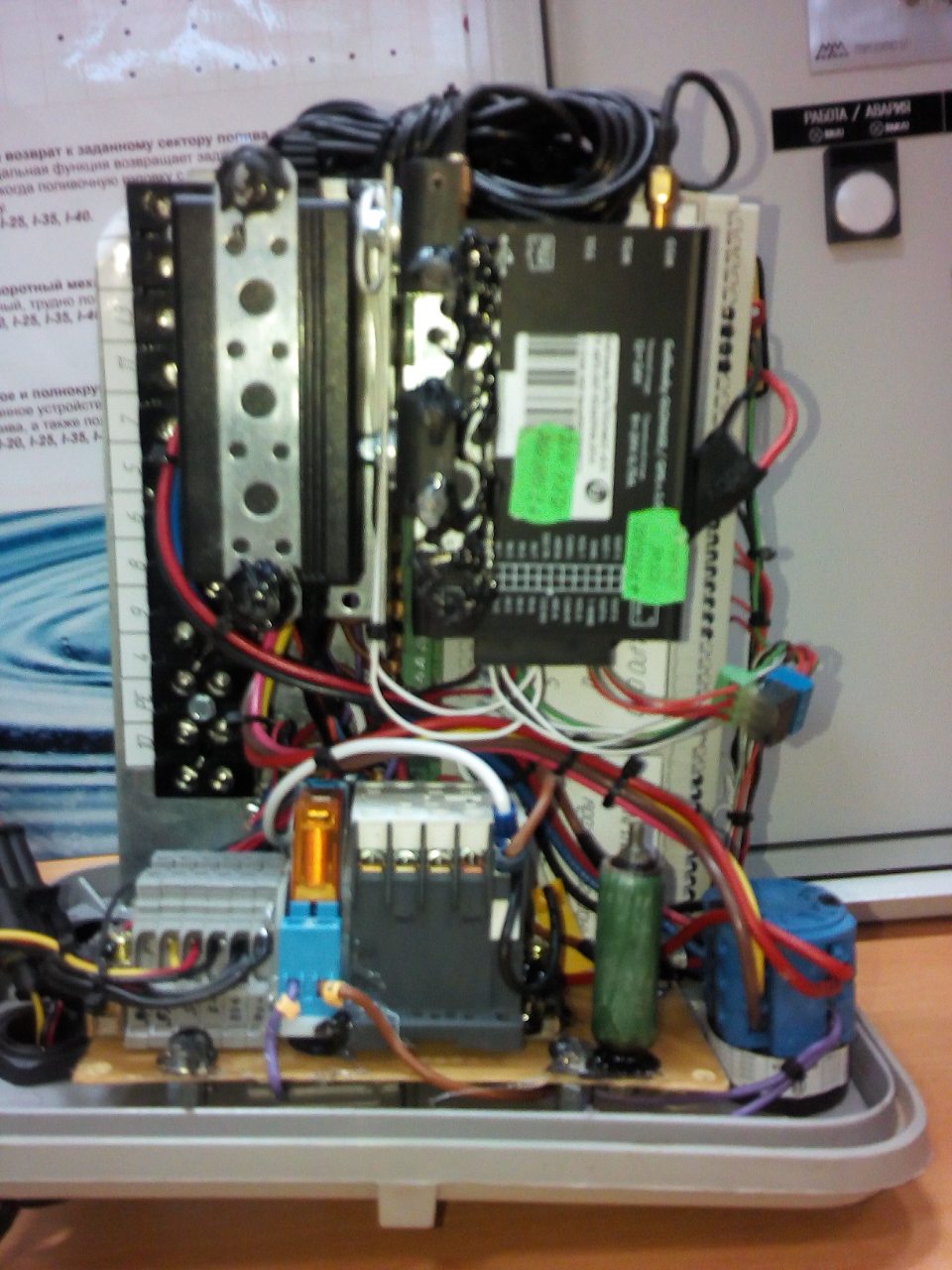
|
 |
|
| Рисунок 97 – Элементы системы управления | |
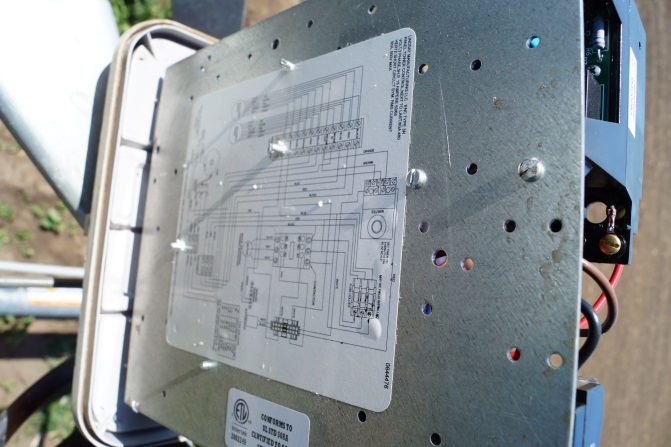
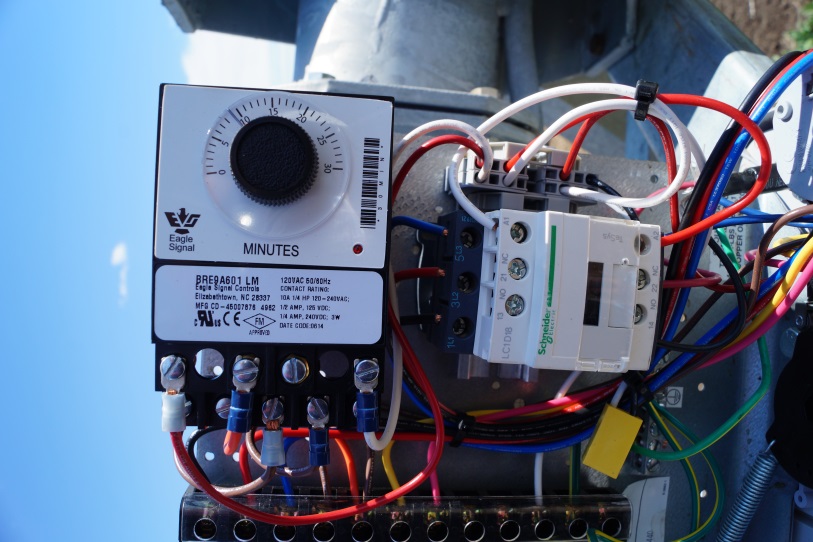
Время до отключения машины может быть задано с помощью реле времени.
Переключатель выравнивания передвижной опоры.
Этот переключатель смонтирован снаружи на нижней плите прибора синхронизации движения в линию.
С помощью этого переключателя можно сдвинуть ту или иную передвижную опору вперёд или назад, при этом нет необходимости открывать прибор синхронизации движения в линию ПСЛ, это облегчает выравнивание машины при первом вводе в эксплуатацию, а также после перемещения передвижной установки на другую позицию.
В общем виде алгоритм управления можно выразить в виде схемы, представленной на рисунке 98.
Рисунок 98 – Алгоритм управления оросительным комплексом
3.5 Система GSM контроля оборудования
Для совершенствования системы управления была разработанасистема GSM контроля оборудования, предназначенная для дистанционного управления, отслеживания работы, оповещения по каналу сотовой связи о работе или отказе оборудования.
SMS оповещения могут быть продублированы голосовым сообщением. Сообщения рассылаются последовательно по предварительно записанному списку телефонов (рисунок 99).
Имеется один встроенный термодатчик и производится непрерывный замер температуры (датчик имеет точность ±1,5 0С).
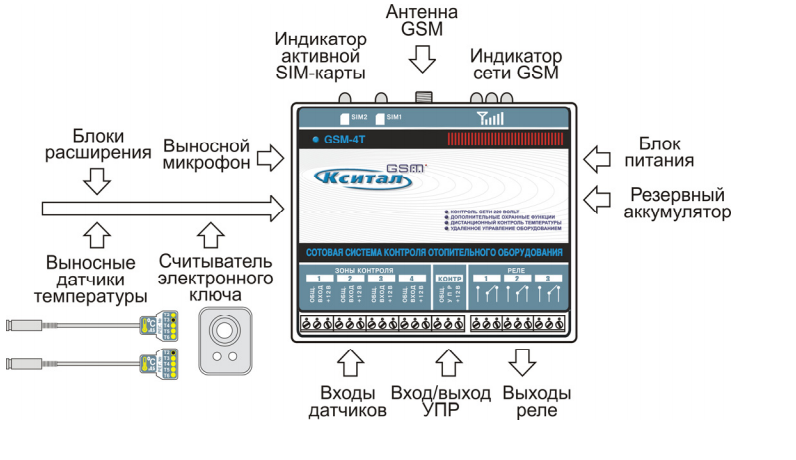
Рисунок 99 – Система GSM контроля оборудования
В состав системы входят: шкаф влагозащищенный, контроллер «КСИТАЛ GSM-12Т» с встроенным GSM-модулем, антенна стандарта GSM, адаптер питания, микрореле контроля 220 В.
Система рассчитана на круглосуточный режим работы при температуре от ‑35 до +50 0С. Мощность, потребляемая системой от сети переменного тока, не более 10 Вт.
Количество встроенных реле — 3:
Реле 1 – автостоп (отключение машины);
реле 2 – старт вперед (движение машины вперед);
реле 3 – дизель-генератор (подача напряжения на машину).
Количество зон контроля (входов) – 12:
1) движение вперед;
2) движение назад;
3) авария (излом секции);
4) включение/выключение машины;
5) движение последней тележки;
6) задвижка открыта;
7) задвижка закрыта;
8) охрана (на зимний период);
9-12) резерв.
Максимальное количество телефонных номеров для рассылки SMS-сообщений – 10. Максимальное количество телефонных номеров для дозвона с голосовым сообщением – 10.
Микропроцессор контролируети регулируеттехнологические параметры, показывает фактическую рабочую скорость, объем выполненной работы, параметры двигателя и удельный расход топлива. Обеспечивает контроль функционального состояния и управление работой с передачей всей собранной информации на монитор оператора. Программируемый логический контроллер обеспечивает выполнение агротехнических мероприятий с внесением необходимых удобрений и пестицидов, согласно заданного алгоритма.
3.6 Планирование поливов при орошении на основе информационно-советующих систем
Основная задача при планировании поливов и задания режима работы машин состоит в оценке влияния основных факторов, определяющих характеристики полива на этапе анализа и разработки рекомендаций.А также факторов, обусловливающих необходимость корректировки режима поливов, анализинформации и принятие решения о внесении изменений в планируемый режим орошения по результатам оперативных метеоданных (рисунок 100).
Рисунок 100 – Схема задания режима работы машины
Оперативное планирование эксплуатационных режимов орошения с использованием математических моделей и компьютерной технологии повышает точность нормирования объемов подачи воды на полив, обеспечивая эффективность и экономию воды и энергоресурсов.
Оперативное управление поливами включают в себя периодическую оценку почвенных влагозапасов в слое активного влагообмена, динамично связанных с видом и фазой развития сельскохозяйственной культуры.
В каждом конкретном случае дефициты водопотребления орошаемых культур необходимо корректировать, используя опытные и расчетные данные (рисунок 101).
Рисунок 101 – Функциональная схема управления поливами
К необходимой текущей ключевой информации следует отнести влажность почвы. К прогнозной − температуру и влажность воздуха, скорость ветра, осадки.
Требуемая информация для контроля: влажность почвы в начале вегетационного периода (через каждые пять дней, декады), контрольные замеры выданных поливных норм и равномерности их распределения по площади и глубине на каждом секторе полива), сбор сведений о состоянии посевов, ходе агротехнических мероприятий. На основании полученных данных – принятие решения о целесообразности и размерах корректировки орошения сельскохозяйственных культур.
Режим работы дождевальной техники должен быть адаптирован к почвенно-климатическим условиям региона, а также содержанию влаги в почве и атмосфере в режиме реального времени, что позволяют возможности современных технических средств, существующих метеостанций, систем автоматизации и управления дождевальными машинами и в той или иной степени используются иностранными производителями дождевальной техники.
Для обеспечения сбора информации используются метеорологический комплекс Devis (рисунок 102) включающий: почвенные автоматические пробоотборники, GPS-приемник, бортовой компьютер, геоинформационные системы (ГИС) для составления пространственно-ориентированных электронных карт полей, дистанционные методы зондирования (ДДЗ).
Метеорологический комплекс DavisVantagePro 2 — многофункциональный комплекс предназначен для профессионального применения и имеет функцию прогноза погоды, которая учитывает координаты места расположения комплекса, время года, текущее значение атмосферного давления и его изменение, скорость и направление ветра, температуру и влажность воздуха, количество осадков. Эти параметры измеряются датчиками, которыми укомплектован метеокомплекс.


Рисунок 102 – Размещение метеорологического комплекса DavisVantagePro 2
Особенности и возможности измерения комплекса: атмосферное давление; температура воздуха; относительная влажность воздуха; скорость и направление ветра; температура точки росы; количество и интенсивность осадков; дата и время; прогноз погоды; фаза луны; время восхода и захода солнца; «мнимая» температура и «прохлада» ветра; интенсивность солнечного излучения; показатель испаряемости; дозу ультрафиолетового излучения; индекс ультрафиолетового излучения.
3.7 Система управления роботизированным оросительным комплексом, построенная на основе отечественного контроллера ОВЕН
Система GSM контроля оборудования предназначена для дистанционного управления, отслеживания работы, оповещения по каналу сотовой связи о работе или отказе оборудования. SMS оповещения могут быть продублированы голосовым сообщением. Сообщения рассылаются последовательно по предварительно записанному списку телефонов. Система один встроенный термодатчик и производят непрерывный замер температуры (датчик имеет точность ±1,50 С).
Если существует вероятность отключения на объекте напряжения 220В, то используется резервный аккумулятор напряжением 12В, который будет заряжаться контроллером по мере необходимости. При наличии резервного аккумулятора система полностью сохраняет работоспособность на время отключения 220В, сообщает о отключения /включении напряжения и разряде резервного аккумулятора.
На плате контроллера установлено два считывателя SIM-карт, основного и резервного оператора. Система автоматически перейдет на резервного оператора в случае потери сети основного оператора или сбоев при передаче через него SMS.
Рекомендуемое общее сопротивление каждого шлейфа — 3,6кОм. При таком сопротивлении напряжение на входе зоны будет равно примерно 7,2В.
Считыватели SIM-карт обозначены надписями SIM1 и SIM2. На позицию SIM1 устанавливается SIM-карта основного сотового оператора, а на позицию SIM2, если нужно, SIM-карта резервного оператора.
Контроллер оснащается съемной антенной стандарта GSM с различной длиной кабеля (в зависимости от места установки). Тип соединителя антенны — SMA.
В состав системы входит блок питания для подключения контроллера в сеть 220В.Используется блок питания со следующими характеристиками:
— входное напряжение: ~200В … 240В;
— выходное напряжение: 18В … 21В;
-ток нагрузки: до 300мА;
— температура срабатывания встроенного термо-предохранителя:+135◦ С.
Резервный аккумулятор подключается к контроллеру через специально предназначенное для этого гнездо. В качестве резервного аккумулятора может быть использован любой свинцовый аккумулятор с напряжением 12В и емкостью до 7,2А/ч. Если будет использован аккумулятор со значительно большей емкостью (например, автомобильный), то перед подключением к контроллеру его следует полностью зарядить.
В случае, если: отсутствует напряжение 220В или напряжение на резервном аккумуляторе снизилось до 11,2 В, то система отправит сообщение о критическом разряде резервного аккумулятора.
При этом будет отключено:
— питание датчиков +12В;
— питание микрофона;
— контроль входов;
— включённые реле.
Дальнейшее снижение напряжения аккумулятора вызовет отключение GSM-передатчика. Система отправит об этом сообщение
Для приема сообщений и отправки команд необходимо пользоваться смартфоном с программой «Логика дома» (для iOSилиAndroid ) или SMS-сообщениями для отправки команд(если номер телефона не занесен в контроллер, то управление и скачивание необходимых настроек невозможно). Для каждогооросительного комплексаиспользуется специальный уникальный код настроек.
Система 24 часа в сутки контролирует параметры системы, при изменении параметров система отправит оператору следующие тревожные сообщения:
— авария, излом секции;большинство дождевальных машин при аварии также продолжают свою поливную функцию, что приводит к неэффективному использованию природных ресурсов. Данная функция помогает оператору оросительного комплекса своевременно узнать об аварии машины и произвести ремонт или отключение, что позволит уменьшить время простоя оросительного комплекса, экономить ресурсы и время;
— положение электрозадвижки (открыта/закрыта), величину давления в трубопроводе;данная функция позволяет в режиме реального времени определить положение электродвижки и наличия давления в трубопроводе при помощи контактных манометров;
— охранная сигнализация; к сожалению, в мире в данный момент наблюдается большое количество краж и недобросовестной конкуренции, злоумышленники без всяких проблем могут проникнуть на орошаемый участок и безнаказанно совершить поломку оборудования, нанесение вреда технике, воровство целых узлов дождевальных машин; GSM сигнализация является эффективным способом охраны от несанкционированного проникновения на объект, исвоевременно уведомляет оператора оросительного комплекса о несанкционированной попытке доступа к узлам управления, причинению вреда дождевальной машине в целом, либо отдельным узлам.
Охранная сигнализация подключается так, что пока оросительный комплекс активен (при плановом поливе), тревожный сигнал оператору не поступает, сопротивление шлейфа находится в состоянии «Норма». Для наиболее эффективной охраны и фиксации правонарушения в системе можно использовать всепогодную камеру с ИК-подсветкой.
Управление с помощью приложения
1. Для экстренного отключения движения машины включение/выключение необходимо воспользоваться командой в приложении “логика дома”- «Автостоп» (рисунок 103).

Рисунок 103 – Команда «Автостоп»
Сообщение, которое контроллер отправит в ответ:Vkluchenorele N1; (реле включено) или Otkluchenorele N1 (реле выключено).
2. Система позволяет дистанционно управлять направлением движения дождевальной машины оператором, а также остановить ее при необходимости. Дистанционно управляемые электродвигатели позволяют быстро и эффективно изменять направление движения.
Для включения движения машины необходимо воспользоваться командой «Старт Вперед» (рисунок 104).
Сообщение, которое контроллер отправит в ответ: Vkluchenorele N3 (включено движение вперед).
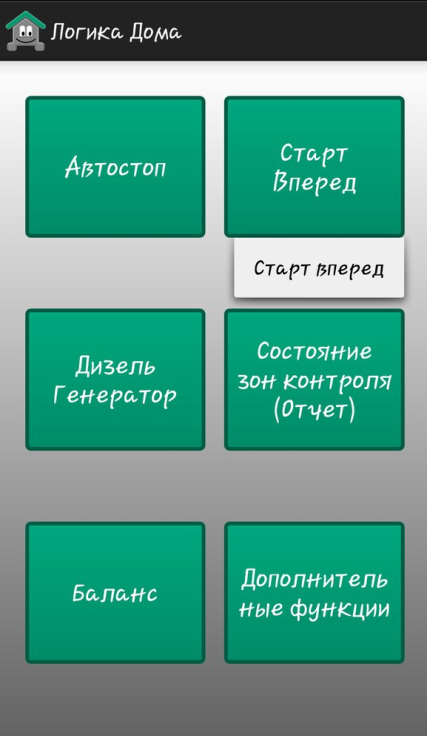
Рисунок 104 – Команда «Старт вперед»
3. Работа дизель-генератора (включен/выключен). Система позволяет дистанционно запускать оператором оросительный комплекс, дизель-генератор на любом расстоянии посредствам отправки СМС-сообщения с определенной командой.
Для подачи напряжения на оросительный комплекс необходимо воспользоваться командой «Дизель Генератор» (рисунок 105).
Сообщение, которое контроллер отправит в ответ: Vkluchenorele N2 (Дизель -генератор включен) илиOtkluchenorele N2 (Дизель-генератор выключен).
Рисунок 105 – Команда «Дизель Генератор»
4. Для запроса о состоянии работы машины необходимо воспользоваться кнопкой «Состояние зон контроля (Отчет)» (рисунок 106).
Рисунок 106 – Команда «Состояние зон контроля (Отчет)»
Сообщение, которое контроллер отправит в ответ:
5. Для того чтобы запросить баланс SIM карты установленной в контроллере, необходимо воспользоваться командой «Баланс» (рисунок 107).
Рисунок 107 – Команда «Баланс»
Сообщение, которое контроллер отправит в ответ:90р
6. Для того чтобы запросить дополнительные функции: температура, включить микрофон (при его наличие), проверить напряжения на входах, поставить и снять с контроля ШС зоны необходимо воспользоваться кнопкой «Дополнительные функции» (рисунок 108).
Рисунок 108 – Команда «дополнительные функции»:
Сообщение, которое контроллер отправит в ответ:
— Температура:T1=26,0C.
— Микрофон: После распознавания команды контроллером будет произведен обратный звонок на основной телефон 00SMS с включенным выносным микрофоном.
— Выключение микрофона произойдет автоматически послерассоединены по инициативе владельца основного телефона 00SMS.
— Напряжения на Входах:U02=7,2V.
— Постановка на контроль:Systemanacontrole. PoSMSot +7**********.
— Снятиесконтроля:Systemanasnata s controla. PoSMSot +7**********.
Содержание отчета о состоянии системы
SMS-сообщение с отчетом о состоянии системы состоит из следующих частей:
— показания всех зарегистрированных датчиков температуры;
— текущий режим («на контроле»/«контроль снят»);
— наличие/отсутствие напряжения 220В;
— строка состояния входов;
— строка состояния реле.
T1 –Температура.
Systemanakontrole/Control systemysnyat. — Состояние контроля ШС.
220V OK/Net 220V – Напряжение в сети.
GSM = 21 − Уровень сигнала.
- Движение вперед.
- Движение назад.
- Авария (излом секции).
- Включение/Выключение машины.
- Движение последней тележки.
- Задвижка открыта.
- Задвижка закрыта.
- Охрана (на зимний период).
- Резерв.
- Резерв.
- Резерв.
- Резерв.
Управление с помощью СМС команд
Система не запоминает состояние реле в энергонезависимой памяти, поэтому после включения питания реле всегда находятся в выключенном состоянии.
-В конце каждой команды должен быть указан действующий пароль: 00000.
— Во избежание переполнения памяти SIM-карты все поступившие SMS стираются после дешифрирования.
— Все SMS-команды должны быть набраны только латинскими буквами.
— Для корректного формирования SMS-команд, пересылаемых с некоторых телефонов, необходимо, чтобы в настройках данного телефона был выбран язык сообщений — английский.
1. Для запуска команды включения «АВТОСТОП» необходимо отправит сообщение:
Сообщение, которое контроллер отправит в ответ:Vkluchenorele N1 (реле включено).
2. Для запуска команды отключение «АВТОСТОП» необходимо отправить сообщение:
Сообщение, которое контроллер отправит в ответ: Otkluchenorele N1 (реле выключено).
3. Для запуска команды«СТАРТ ВПЕРЕД»:
Сообщение, которое контроллер отправит в ответ:Vkluchenorele N2(включено движение вперед).
4. Для запуска командывключение «Дизель Генератор»
Сообщение, которое контроллер отправит в ответ:VkluchenoreleN3(Дизель-генератор включен).
5. Для запуска командыотключение «Дизель Генератор»
Сообщение, которое контроллер отправит в ответ:OtkluchenoreleN4(Дизель-генератор отключен).
6. Запрос температуры окружающей среды и влажности почвы. Система позволяет в режиме онлайн (посредствам СМС) узнавать температуру оборудования и окружающей среды, термодатчики работают в диапазоне от -55 °C до +125 °C, погрешность термодатчиков ±0,5 °C. При необходимости оператор ДМ может сам выставлять диапазон и получать сообщение о изменение температуры.
Оператор может своевременно получать оповещение об изменении влажности почвы, это необходимо, для того чтобы оператор мог запустить или остановить ДМ в зависимости от влажности посредствам группы датчиков влажности, установленных на различной глубине и расстоянии.
Для запуска команды необходимо отправить СМС сообщение:
Сообщение, которое контроллер отправит в ответ:
T1=26,0C
T2—
T3—
7. Для того чтобы запросить баланс, необходимо отправить СМС с командой:
Контроллер производит запрос баланса активной в данный момент (основной или резервной) SIM-карты. Из отклика оператора формируется ответное сообщение.
Сообщение которое контроллер отправит в ответ:90 р.
8. Включение выносного микрофона:
После распознавания команды контроллером будет произведен обратный звонок на основной телефон 00SMS с включенным выносным микрофоном.
Выключение микрофона произойдет автоматически после отсоединения по инициативе владельца основного телефона 00SMS.
9. Запрос напряжения на входах (необходимо для обслуживания системы):
Сообщение, которое контроллер отправит в ответ:U02=7,2V.
Передача данных через интернет
Система «КСИТАЛ» имеет возможность в фоновом режиме передавать по Интернету значениясвоих параметров на произвольный сервер. К таким параметрам относятся:
— показания термодатчиков (с именами датчиков от Т1 до Т31);
— уровень приёма GSM-сигнала (имя датчика GSM, значение в условных баллах от 0 до31);
— напряжение на разъеме для резервного аккумулятора в Вольтах (имя датчика UACC);
— напряжение на входах зон контроля в Вольтах (имена датчиков с U01 по U12);
— напряжение в Вольтах на входе «Управление»;
— состояние реле (имена датчиков RL1, RL2 и RL3, принимаемые значения: 0 –релевыключено, 1 — реле включено).
Значения всех параметров передаются в одном пакете, период отправки пакетов может бытьизменен в настройках.Также можно настроить режим сессий. При значении параметра S=0 перед началомпередачи пакета открывается GPRS-сессия, а после передачи она закрывается. Так какобъем передаваемых данных в одном пакете меньше 1 килобайта.
Сбор и обработка данных GSM контроллером
Основная задача на стадии реализации эксплуатационных режимов орошения состоит в оценке основных факторов, обусловливающих необходимость корректировки режима поливов, анализе информации и принятии решения о внесении изменений в планируемый режим орошения.
Оперативное планирование эксплуатационных режимов орошения с использованием математических моделей и компьютерной технологии повышает точность нормирования объемов подачи воды на полив, обеспечивая эффективность гидромелиорации на различных природно-ландшафтных территориях, адекватный выбор антропогенных воздействий, экологическое равновесие природной среды и ресурсосбережение.
Методические основы оперативного управления поливами включают в себя ежедневную оценку почвенных влагозапасов в слое активного влагообмена, динамично связанных с видом и фазой развития сельскохозяйственной культуры. В каждом конкретном случае при близком залегании грунтовых вод дефициты водопотребления орошаемых культур необходимо корректировать, используя опытные и расчетные данные.
Система диспетчеризации предназначена для сбора и обработкитехнологической информации, поступающей от оборудования подключенной к системе. Дляобработки информации, поступающей по Интернету от контроллера.
Блок расчета оперативного планирования поливов:
— расчет показателей тепловых ресурсов и влагообеспеченности территории – испаряемость, почвенные влагозапасы, капиллярный приток из грунтовых вод, коэффициенты природного увлажнения, отражающие соотношение приходных и расходных частей водного баланса;
-расчет суммарного водопотребления сельскохозяйственных культур, определяемого по биоклиматической модели с использованием биологических, микроклиматических коэффициентов и почвенно-мелиоративных констант, адаптированных для конкретных условий региона;
-расчет дефицита водопотребления;
-оперативное планирование поливов.
Блок выдачи рекомендаций:
-рекомендации на бумажном носителе в виде уточненных графиков полива на ближайшие трое- пять суток. Реализация эксплуатационных режимов орошения и их оптимизация (на основе оперативного управления поливами) заключаются в следующем:
-корректировка и управление режимами поливов по «требованию» для поливных участков, обслуживаемых дождевальной машиной;
-измерение на поливных участках влажности почвы в начале вегетационного периода, а в течение вегетационного периода – через каждые пять дней, декаду или месяц с целью контроля за изменением запасов влаги в почве расчетным методом;
-систематические контрольные замеры реализованных поливных норм и равномерности их распределения по площади и глубине на каждом севооборотном участке;
— систематический сбор текущей и прогнозной метеорологической информации;
-сбор сведений о состоянии посевов, ходе агротехнических мероприятий, готовности поливной техники, оросительной сети и насосных станций;
-обработка полученной информации и выполнение водобалансовых расчетов на текущий и пятидневный, декадный прогнозные периоды;
— оценка по полученным данным сложившейся ситуации и принятие решения о целесообразности и размерах корректировки режима орошения сельскохозяйственных культур.
Разработанная система управления позволяет анализировать удаленно полученную информацию о гидрометеорологических факторах(рисунок 109).
Рисунок 109 – Блок-схема расчета почвенных влагозапасов с выдачей рекомендации по поливу
Основные компоненты системы дистанционного контроля
Оперативное управление поливами осуществляется в соответствии со схемой, представленной на рисунке 110 и включающей:
— блок анализа текущего состояния агроценозов;
— блок сбора фактической метеоинформации (влажность почвы, мм/неделю,температура воздуха, °С,влажность воздуха, %, скорость ветра, м/с, осадки, мм);
— блок расчета оперативного планирования поливов (наличие компьютера и программного обеспечения);
— блок выдачи рекомендаций(наличие компьютера и программного обеспечения).
Рисунок 110 – Структурно функциональная схема оперативного управленияполивами
Контроллер GSMпредназначен для учета циклов, времени работы и простоя поливной техники, технических и технологических операций, элементов оросительных систем и других технологических объектов с целью определения показателей надежности работы, их эксплуатации.
Используя структурные схемы соединения технологических датчиков и контроллера косвенным способом при контроле номинального давления в трубопроводе последнего порядка оросительной системы, фиксируя каждый раз время подачи воды t и зная ее расход qо при этом давлении, можно рассчитать отдельные и суммарные объемы водоподачи по формуле
При помощи комплекса (контроллера, группы технологических датчиков(ТД), устройства индикации данных) при полевых испытаниях была получена и изучена информация не только о метеорологических показателях, но и о качестве и надежности работы рабочих органов.
3.8 Возможности организации серийного производства роботизированных оросительных комплексов в Саратовской области
Приведем содержание работ по организации производства роботизированных оросительных комплексов:
— Патентный, литературный и информационный поиск современных конструкций оросительной техники и оборудования.
— Конструктивная компоновка элементов роботизированного оросительного комплекса с учетом серийного производства.
— Изготовление модельных элементов конструкции роботизированного оросительного комплекса.
— Составление комплектности разрабатываемой технической документации для роботизированного оросительного комплекса.
— Разработка рекомендаций по внесению с оросительной водой удобрений.
— Разработка проекта помещения для создания высокотехнологичного производства роботизированных оросительных комплексов.
— Выбор и приобретение материалов для оборудования таких помещений.
— Приобретение металлопроката для изготовления опытных приспособлений и оснасток.
— Разработка эскизных чертежей конструкции роботизированного оросительного комплекса.
— Закупка и пуско-наладка оборудования для изготовления экспериментальных (опытных) образцов роботизированного оросительного комплекса.
— Приобретение материалов для изготовления экспериментальных (опытных) образцов роботизированного оросительного комплекса.
— Изготовление экспериментальных (опытных) образцов комплекса.
— Разработка инструкции по эксплуатации и техническому обслуживанию роботизированного оросительного комплекса.
— Разработка документации по адаптации оросительного комплекса к полевым условиям (с учетом культур, климатических и почвенных условий).
— Проведение испытаний экспериментального (опытного) роботизированного оросительного комплекса.
— Сертификация роботизированного оросительного комплекса.
— Выполнение проекта серийного высокотехнологичного производства.
— Приобретение оборудования, создание линий для изготовления экспериментальной машины. Их установка и пусконаладка.
— Изготовление конструкторской документации на роботизированный оросительный комплекс и его модификации.
— Проектирование специализированного технологического оборудования и стендов для производства роботизированного оросительного комплекса (для серийной линии).
— Работы по совершенствованию системы автоматизации и интеллектуального управления (в том числе, дистанционного) роботизированными оросительными комплексами и разработкой рекомендаций по их использованию.
— Проведение испытаний вариантов систем электрообеспечения и управления орошением, синхронизации движения, а также дождеобразующих устройств с целью организации серийного выпуска компонентов для роботизированного оросительного комплекса.
— Разработка автоматизированной системы мониторинга и управления орошением (поливным комплексом) и приобретение оборудования для ее внедрения.
— Закупка станков, оборудования и приспособлений для обеспечения замкнутого цикла серийного производства
Предлагаемое технологическое оборудование:
-Машина плазменной резки с ЧПУ Start L50 (6,5 кВт) – 1 шт.
-Станок лазерной резки серииLaserCutProfessional ML(14,6кВт) – 1 шт.
-Аргонодуговой сварочный инвертор Aurora PRO INTER TIG 200 (4,5 кВт) – 6 шт.
-Мобильная фильтровентиляционная установка ФВУ-03 (1,5 кВт) – 6 шт.
-Полуавтоматический колонный ленточнопильный станок ARG 330 DC S.A.F (3,5 кВт) – 3 шт.
-Станок сверлильно-фрезерный СФ32Б (1,3 кВт) – 4шт.
-Гидравлический пресс 40 тн П6326 (13 кВт) – 1 шт.
-Кран мостовой г/п 5 тн (27 кВт) – 1 шт.
-Кран мостовой г/п 10 тн (35 кВт) – 1 шт.
-Кондуктор – 5 шт. (индивидуальное изготовление).
-Технологическая линия по изготовлению труб для оросительного комплекса (33 кВт).
Вспомогательное оборудование:
-Стоечный стеллаж для складирования труб (индивидуальное изготовление).
-Стеллаж для складирования листового проката (индивидуальное изготовление).
-Роликовая опора для труб RJ-98 – 64 шт.
-Ультразвуковой дефектоскоп УД9812 Уралец — 1 шт.
-Стол сборки аппаратуры – 3 шт.
-Паяльная станция LUKEY-853D 12-0043-4 (0,8 кВт) – 3 шт.
Технологическая оснастка:
-Сверла по металлу.
-Фрезы по металлу.
-Пилы по металлу.
-Тиски слесарные.
-Слесарный инструмент.
-Стеллажи складские.
-Комплект снаряжения для сварщика – 6 шт.
-Пиломатериалы, проволока вязальная для упаковки.
-Газификатор с испарителем (для аргона).
-Восстановленные сети снабжения СО и сжатым воздухом.
-Подъемник телескопический для замены ламп освещения.
Персонал производства (полная серийная загрузка):
-Оператор плазмореза – 1 чел.
-Оператор лазерной резки – 1 чел.
-Оператор пильного станка – 3 чел.
-Оператор сверлильного станка – 4 чел.
-Оператор пресса – 1 чел.
-Сварщик (аргон) – 6 чел.
-Помощник сварщика – 6 чел.
-Контролер качества сварки – 1 чел.
-Крановщик – 2 чел.
-Стропальщик – 2 чел.
-Разнорабочий – 2 чел.
-Сборщик узлов управления и систем автоматизации – 3 чел.
-Начальник участка – 1 чел.
-Кладовщик – 1 чел.
Цех по производству должен обеспечить:
Производственные мощности по выпуску роботизированных оросительных комплексов:
— в 2020 году – 3 опытных образца;
— в 2021 году – 20 установок (опытная партия);
— в 2022 году – 40 установок (серийная партия);
— в 2023 году – 120 установок;
— в 2024 году – 150 установок;
— в 2025 году – 160 установок;
— в 2026 году – 180 установок;
— в 2027 году – 200 установок и более.
Технологическая подготовка производства должна быть осуществлена в соответствии с ГОСТ Р 50995.3.1-96.
Для экспериментального (опытного) образца роботизированного оросительного комплекса:
— отработка в производственных условиях, определяющих технологических и организационных решений по изготовлению экспериментального образца комплекса;
— обеспечение технологической готовности производства к изготовлению для приемочных испытаний роботизированного оросительного комплекса;
— обеспечение производства по договорам и кооперационным связям необходимыми материалами, деталями, сборочными единицами, комплектующими изделиями, средствами технологического оснащения, а также входного контроля их качества;
— метрологическое обеспечение производства;
— технический контроль;
— аттестация технологических процессов, рабочих мест исполнителей и технологического оборудования до его первичного применения;
— подготовка производственного персонала в связи с освоением новых технологий и материалов.
Для серийных роботизированных оросительных комплексов:
— проработка рабочей конструкторской документации на серийное изделие с учетом технологичности заложенных в нее решений;
— разработка (корректировка):
а) технологических процессов изготовления серийного изделия в соответствии с государственными стандартами ЕСТД;
б) специальных средств технологического оснащения в соответствии со стандартами ЕСКД и технологических процессов их изготовления в соответствии со стандартами ЕСТД;
в) управляющих программ для автоматизированного технологического оборудования;
— приобретение (изготовление) специальных средств технологического оснащения для производства серийных изделий;
— обеспечение необходимой технологической информацией реконструкции или нового строительства производственной и испытательной баз;
— уточнение (корректировка) технологической документации по результатам изготовления и квалификационных испытаний установочной серии (первой промышленной партии);
— обеспечение требований ресурсосбережения, экологии и охраны труда при изготовлении и испытаниях серийных изделий;
— обеспечение производства по договорам и кооперационным связям необходимыми материалами, деталями, сборочными единицами, комплектующими изделиями, средствами технологического оснащения, а также входного контроля их качества;
— метрологическое обеспечение производства;
— технический контроль;
— аттестация технологических процессов, рабочих мест исполнителей и технологического оборудования до его первичного применения;
— подготовка производственного персонала в связи с освоением новых технологий и материалов.
4. ОСНОВНЫЕ ЭЛЕМЕНТЫ РОБОТИЗИРОВАННОГО ОРОСИТЕЛЬНОГО КОМПЛЕКСА НА ОСНОВЕ ТЕХНОЛОГИЙ ИМПОРТОЗАМЕЩЕНИЯ И С ВОЗМОЖНОСТЬЮ ОРГАНИЗАЦИИ СЕРИЙНОГО ПРОИЗВОДСТВА В САРАТОВСКОЙ ОБЛАСТИ
4.1 Основные элементы металлоконструкции
Основные элементы металлоконструкции представлены в приложении А.
4.2 Основные элементы системы управления и автоматики в базовом исполнении
Основные элементы системы управления и автоматики в базовом исполнении:
-прибор слежения курса промежуточный;
-прибор слежения курса предпоследний;
-прибор слежения курса концевой;
-концевой токосъемник;
-шкаф управления стандарт;
-кабели питания и управления.
На поворотном колене установлентокопереход (ТП), который предназначен для передачи электрической энергии и сигналов управления от щита управления, расположенного на неподвижной опоре к приборам синхронизации в линию.
С помощью щита управления и пульта управления осуществляется все технологические операции управления оросительным комплексом.
Машина осуществляет круговое движение в режиме ручного или автоматического управления. Выбор режимов работы, направление движения и направление разворота, а также пуск и остановку в ручном режиме осуществляется со щита управления. Скорость движения задаётся со щита управления путём изменения ПВ% (продолжительность включения) электродвигателя последней тележки. Движение остальных тележек машины происходит в старт-стоповом режиме, при этом управление движением каждой тележкой осуществляется автономно прибором синхронизации движения в линию промежуточных тележек.
Прямолинейность трубопровода машины обеспечивается совместной работой системы прямолинейности, при этом взаимное перемещение тележек воздействует через рычаг и передаётся на блок управления, который включает (при отставании) и выключает (при опережении) связанный с ним электродвигатель мотора-редуктора тележки.
Система управления электроприводом предназначена для автоматического управления электродвигателями тележек, защиты силовых цепей и цепей управления электродвигателями тележек, защита силовых цепей и цепей управления, контроля и сигнализации режимов работы электрооборудования.
Щит управления предназначен для защиты электрических цепей системы управления тележки от коротких замыканий, отчета отработанного времени, а также для размещения органов оперативного управления, комплектующих элементов релейно-контакторной схемы управления, коммутации цепей и сигнализации режимов работы электрооборудования машины в соответствии с алгоритмом выбранного режима управления.
Стандартные компоненты:
SQ-2 Главный выключатель.
В положении «1» устанавливается электроснабжение машины.
Поворотная панель управления (внутренние дверцы) в этой позиции заблокирована в целях безопасности.
В положении «0» главный выключатель имеет блокировку, которая предотвращает его случайное включение. Поворотная панель управления может открываться только в этой позиции переключателя.
P-1 Вольтметр.
Показывает напряжение между фазами L1 и L2.
P-2 Счетчик рабочих часов.
Показывает общее количество отработанных часов машины.
SА-0 Выключатель аварийного останова.
Кнопочный выключатель, красного цвета с толкателем в форме грибка, с фиксацией, отпускание поворотом. Аварийный выключатель — это нормально замкнутый выключатель, который размыкает цепь при нажатии на него. Предназначен для подачи команды на отключение цепей управления электроустановкой. В ЩУ предусмотрен штатный останов SQ-2 главный выключатель. Аварийный стоп используется только в аварийных ситуациях.
Когда контакт размыкается, цепь рвётся, питание с цепи управление пропадает. Силовая цепь остаётся без управления, и все приводы останавливаются.
SА-1 Переключатель «ВКЛ-ВЫКЛ РАБОТЫ МАШИНЫ».
В положении «1» систему можно запустить нажатием кнопок SВ-2 или SВ-3.
При повороте переключателя в положение «0» машина останавливается.
SВ-2 Кнопка с подсветкой «СТАРТ ВПЕРЕД».
При нажатии этой кнопки машина запускается в прямом направлении.
При движении машины вперед (по часовой стрелке) кнопка подсвечивается.
SВ-3 Кнопка с подсветкой «СТАРТ НАЗАД».
При нажатии этой кнопки машина запускается в обратном направлении.
При движении машины назад (против часовой стрелки) индикатор светится.
SА-4 Переключатель «КРУГ БЕЗОПАСНОСТИ ВКЛ-ВЫКЛ». Ручное выравнивание машины.
В положении «ON» при появлении помех (например, изгиб) выключается вся машина.
Положение «OFF» предназначено исключительно для выравнивания машины.
Во время работы этот переключатель ДОЛЖЕН всегда находиться в положении «ON»! Только таким образом гарантируется безопасность при работе установки в условиях отсутствия оператора!
SА-5 Переключатель «ПОЛИВ – БЕЗ ПОЛИВА» Сухой ход.
В положении «ON» при понижении давления ниже установленной границы машина отключается благодаря датчику давления (опция), смонтированному на трубе подачи воды.
Положение «OFF» позволяет включить сухой ход машины, без полива.
Режим работы электродвигателя крайней тележки — «НЕПРЕРЫВНЫЙ», (например, если машину необходимо перевезти на место стоянки) «ПЕРЕГОН». Этот переключатель работает только вместе с датчиком давления (опция)!
S-6 Переключатель «ПРОМЕЖУТОЧНАЯ ОСТАНОВКА ВКЛ-ВЫКЛ».
В положении «ON» машина останавливается в заданном парковочном положении.
Парковочное положение можно задать сдвигом концевых датчиков на водоподводящей трубе.
Этот переключатель работает только вместе с опцией АВТОМАТИКА-СТОП!
K-4 Процентный таймер «СКОРОСТЬ».Ручное задание скорости движения машины путём установки в ЩУ-001.2 режима работы электродвигателя крайней тележки — непрерывный или повторнократковременный с продолжительностью включения (ПВ) в диапазоне от 10% до 90%.
Когда контакт размыкается, цепь рвётся, питание с цепи управление пропадает. Силовая цепь остаётся без управления, и все приводы останавливаются.
5. ЛАБОРАТОРНЫЕ УСТАНОВКИ СОЗДАННЫЕ В РАМКАХ РЕАЛИЗАЦИИ ПРОЕКТ
5.1 Лабораторная установка «Дождевальная машина с альтернативным источником энергоснабжения»
Для определения работоспособности роботизированного оросительного комплекса была изготовлена лабораторная установка (рисунки 111 и 112).
Рисунок 111 – Лабораторная установка «Дождевальная машина с альтернативным источником энергоснабжения»: 1 – водопроводящий трубопровод, 2 – А — образная рама, 3 – поперечная балка, 4 – колесный редуктор, 5 – редукторный электродвигатель, 8 – пневматические шины, 9 – герметичный щит с аккумуляторными батареями, 12 – прибор синхронизации движения в линию, 13 – ферма трубопровода, 14 – Х – образные кронштейны, 15 – солнечные батареи, 16 – соединительные провода.
Лабораторная установка состоит из водопроводящего трубопровода 1, на котором располагаются солнечные батареи 15, закрепленные на Х-образных кронштейнах 14 и 16, шпренгельной фермы и подвижной опоры 5 А-образного типа.Верхняя часть подвижной опоры соединяется с водопроводящим трубопроводом.
В нижней части опоры, на основании, располагается электродвигатель постоянного тока 3 с редуктором 4, который соединён при помощи карданных валов с редукторами пневматических колес, 8 на которых передвигается подвижная опора. В средней части опоры смонтирован щит 9, на котором располагаются аккумуляторные батареи. Управление движением секции также можно осуществлять в ручном режиме непосредственно со щита управления.
Рисунок 112 – Лабораторная установка «Дождевальная машина с альтернативным источником энергоснабжения»
Работает установка следующим образом. Солнечные лучи поступают на поверхность солнечных батарей. Энергия солнечных лучей преобразуется в электрическую в солнечных модулях и передается на аккумуляторную батарею через контроллер заряда аккумуляторных батарей. Контроллер заряда аккумуляторных батарей регулирует количество преобразованной электрической энергии, которая передается на аккумуляторную батарею. Выводы аккумуляторной батареи соединяются с выводами магнитного пускателя электродвигателя постоянного тока.
Рисунок 113 – Демонстрация работы лабораторной установки
Разработанная лабораторная установка активно используется в учебном процессе для обучения студентов, а также повышения квалификации сотрудников предприятий АПК с системами орошения.
5.2 Лабораторная установка «Стенд для испытания фильтров»
Лабораторная установка, представленная на рисунке 114, предназначена для проведения испытаний фильтров и фильтрующих элементов различных конструкций и характеристик.
Стенд позволяет определить:
1. Герметичность фильтрующих элементов;
2. Гидравлической характеристики фильтра (перепад);
3. Характеристик фильтрования (тонкость фильтрации);
4. Прочности фильтрующих элементов при максимальном перепаде.
3
1
2
3
Рисунок 114 – Лабораторный стенд испытания фильтров
Стенд испытаний состоит из задвижки трубопровода – 1, трубопровода – 2, измерительного оборудования (расходометрический комплекс), 2-х манометров(вход/выход) – 3.
Разработанная лабораторная установка активно используется в учебном процессе для обучения студентов, а также повышения квалификации сотрудников предприятий АПК с системами орошения.
ЗАКЛЮЧЕНИЕ
Повышение технического уровня сельскохозяйственной техники и технологии производства сельскохозяйственной продукции требует совершенствования технологии обработки почвы, внесения удобрений, ядохимикатов и орошения. Необходимо обеспечивать рациональное использование ресурсов, максимальную адаптацию технологии внесения удобрений, ядохимикатов и полива к региону применения, экологическую безопасность, сохранение и повышение плодородия почв.
Актуальным является проведение научно-внедренческих исследований, направленных на создание технологий на основе цифровых, интеллектуально-советующих систем управления сельскохозяйственными машинами, обеспечивающими внесение удобрений, опрыскивание, опыливание и полив.
В отчете дается краткое обоснование необходимости разработки роботизированного оросительного комплекса с интеллектуальной системой управления, а также применение альтернативных источников энергии для работы оросительного комплекса, так как существующие дождевальные машины не в полной мере удовлетворяют требованиям сельскохозяйственного производства. Очевидна необходимость уменьшение влияния «человеческого фактора», максимально эффективное использование сельскохозяйственной техники, оптимизация применения удобрений, ядохимикатов, полива, а также повышение урожайности сельскохозяйственных культур при минимальном вложении капитала и воздействия на окружающую среду.
Повышения качества полива может быть обеспечено путем изменения поливной нормы в соответствии с уровнем влагозапасов участков поля в режиме реального времени, адаптации режима полива к изменяющимся в течение поливного периода условиям, что требует совершенствования системы управления агрегатами, расширения их технологических возможностей, внедрения информационных технологий.
В Саратовском государственном аграрном университете им. Н.И. Вавилова ведутся разработки систем управления сельскохозяйственными машинами, обеспечивающими удаленный контроль работы, сбор, обработку и анализ данных о ходе выполнения технологических процессов, основанных на использовании компьютерных технологий, аппаратно-программного комплекса для ведения точного земледелия.
Был разработан роботизированный оросительный комплекс с системой управления обеспечивающей контроль функционального состояния, работы машины, дистанционного управления по сотовой связи. Была разработана система альтернативного источника энергоснабжения от солнечных панелей и аккумуляторных батарей.Повышение качества полива обеспечивается путем изменения поливной нормы в соответствии с уровнем влагозапасов участков поля в режиме реального времени, адаптации режима полива к изменяющимся в течение поливного периода условиям.
Точныйполивдождеваниемвзависимости от потребной нормы полива каждогоучасткаполяпозволяет значительно снизитьрасход воды и энергии. В настоящее время ведутся разработки по оптимизации технологии совмещения процессаполиваивнесенияудобрений ипестицидов, позволяющие сократить затраты на внесение удобрений при помощи специальной техники, а также уменьшить количество проходов сельскохозяйственной техники в поле.
Для исследований характеристик почвы разработанпочвоотборник на базе УАЗ-3909. Проанализированы и подобраны датчики и сенсорные устройства.
Расширяется база данных системы управления для различных почвенно-климатических условий и культур.
Технико-технологические параметры нового роботизированного оросительного комплекса, его надежность, позволяют сделать заключение о его конкурентоспособности на рынке дождевальной техники.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Абдразаков Ф.К.,ЖуравлеваЛ.А., Соловьев В.А. Рациональное снижение металлоемкости при конструировании широкозахватных дождевальных машин //Аграрный научный журнал. 2018. №5.С. 37-42.
2. Анализ рынка дождевальной и поливной техники в России в 2009-2014 гг. Прогноз на 2014-2018 г. [Электронный ресурс]. – Режим доступа: // http://businesstat.ru/russia/engineering/farm equipment/– (Дата обращения: 18.12.2020).
3. Белянина Н.В. Организация и функционирование геоинформационной системы экологического мониторинга на основе распределенных вычислений/ Н.В. Белянина. – М.: Синергия, 2014. – 396 с.
4. Бешенцев А.Н. Геоинформационная оценка природопользования: монография / А.Н. Бешенцев. М.: БНЦ СО РАН, 2018. 120 с.
5. Блиновская Я.Ю. Введение в геоинформационные системы. Учебное пособие / Я.Ю.Блиновская.М.: Инфра-М, Форум, 2018. 685 с.
6. Баранов Д.Н. Разработка интеллектуальной системы управления мобильными роботами на основе следящей системы технического зрения и нечеткой логики: дис. к-та техн. наук. Москва, 2008. 222с.
7. Василенков В.Ф. Экологическая и экономическая оптимизация эксплуатационного режима орошения современными дождевальными машинами // Вестник Рязанского государственного агротехнологического университета им. П.А. Костычева. 2015. №4.С. 85-92.
8. Гаврилица О. А. Эрозионная деградация черноземов при поливе дождеванием и пути ее предупреждения: Автореф. дис. д-ра техн. наук. – Кишинев, 1991. 48 с.
9. Гаврилица О.А. Эрозионные процессы при поливе дождеванием и пути их минимизации // Почвоведение. 1993. № 3. С. 77-84.
10. Геоинформатика: в 2 кн.: учебник для студентов ВУЗов / [Е.Г. Капралов, А.В. Кошкарев, В.С. Тикунов], под ред. В.С. Тикунова. – М.: Академия, 2010. 400+432 с.
11.Городничев В.И. Автоматизация и управление на оросительных системах // Ресурсосберегающие и энергоэффективные технологии и техника в орошаемом земледелии: Матер. Межд. науч.-практ. конф. Ч. 1. Коломна: ФГНУ ВНИИ «Радуга», 2003. С. 174-176.
12. ДьяконовВ.П.MATLAB.Полныйсамоучитель. М.:ДМКПресс,2012. 768с.
13. ГОСТ 28268-89 Почвы. Методы определения влажности, максимальной гигроскопической влажности и влажности устойчивого завядания растений. М.: Стандартинформ, 2006. 8с.
14. ГОСТ 24059–88. Техника сельскохозяйственная. Методы эксплуатационно-технической оценки транспортных средств на этапе испытаний. М.: Стандартинформ, 1988. 48с.
15. ГОСТ ИСО 11545-2004. Оборудование сельскохозяйственное оросительное, машины дождевальные кругового и поступательного действий с дождевальными аппаратами или распылителями. Определение равномерности орошения. М.: Стандартинформ, 2004. 10с.
16. ГОСТ ИСО 8224-1-2004. Машины дождевальные подвижные. Часть 1. Эксплуатационные характеристики и методы лабораторных и полевых испытаний. М.: Стандартинформ, 2004. 29с.
17. Гостищев Д.П., ПушкоМ.И. Проблемы орошаемого земледелия в АПК Саратовской области // Мелиорация и водное хозяйство. 1999. № 3. С. 27-29.
18. Гостищев Д.П., Гильденберг Е.Ю.,Меры по борьбе с эрозией почв при поливе сельскохозяйственных культур дождеванием//Проблемы устойчивого развития мелиорации и рационального природопользования. М.: ВНИИ А имени Д.Н. Прянишникова, 2007. №2.С.136-142.
19. Официальный сайт компании Trimble [Электронный ресурс]. ‒ Режим доступа: http://www.trimblegnss.ru ‒ (Дата обращения 18.12.2020).
20. Журкин И.Г., Шайтура С.В. Геоинформационные системы. М.: КУДИЦ-ПРЕСС, 2009. 272 с.
21. Каталог BAUER. Самая эффективная система под солнцем [Электронный ресурс]. – Режим доступа: www.bauer-at.com. – (Дата обращения: 16.12.2020).
22. Каталог ирригационной продукции ZimmaticbyLindsay [Электронный ресурс]. – Режим доступа: www. lindsay.com. – (Дата обращения: 23.12.2020).
23. Каталог. I-WobSenninger.Дождеватель для механизированного орошения [Электронный ресурс]. – Режим доступа: www.senninger.com– (Дата обращения: 16.12.2020).
24. Каталог Lindsay. Повышение урожайности пшеницы за счет применения эффективных решений в области орошения[Электронный ресурс]. – Режим доступа: www.lindsay.com– (Дата обращения: 23.01.2018).
25. Каталог. Отличительные особенности ирригационных машин Reinke[Электронный ресурс]. – Режим доступа: www.reinke.com (Дата обращения: 16.12.2020).
26. Каталог фирмы RKD [Электронный ресурс]. – Режим доступа: http:// rkd.su / 2016. – (Дата обращения: 16.12.2020).
27. Каталог T-LirrigationCompanysales@tlirr.com[Электронный ресурс]. – Режим доступа: www.tlirr.com– (Дата обращения: 16.12.2020).
28. Каталог продукции Valley[Электронный ресурс]. – Режим доступа: / www.valmont.com/irrigation –(Дата обращения: 16.12.2020).
29. Каталог широкозахватных дождевальных машин, ирригационного оборудования, систем капельного орошения и насосных станций Российского производства. Министерство сельского хозяйства Российской Федерации. Департамент мелиорации. ФГБНУ ВНИИ «Радуга». 2016.
30. Каталог продукции RAINHUNTER. Системы автополива[Электронный ресурс]. – Режим доступа: https:// rainhunter.ru– (Дата обращения:16.12.2020).
31. Каталог продукции RainBird[Электронный ресурс]. – Режим доступа: //www. rainbird. Com. – (Дата обращения:16.12.2020).
32. Каталог продукции RainBird[Электронный ресурс]. – Режим доступа: //www. avtopoliv-rainbird.ru – (Дата обращения:16.12.2020).
33. Колганов А.В. Развитие мелиорации земель сельскохозяйственного назначения в России: монография. Новочеркасск: РосНИИПМ, 2016. 222с.
34. Концепция федеральной целевой программы «Развитие мелиорации земель сельскохозяйственного назначения России на 2014–2020 годы». М., 2010. 60 с.
35. Костяков А.Н. Основы мелиорации. М.: Сельхозгиз, 1960. 622с.
36. Материалы сайта компании Lindsay: url: [Электронный ресурс]. Режим доступа: http: // www. lindsayrussia.com – (Дата обращения 16.12.2020).
37. Медведев А.В. Мелиоративная техника – основа устойчивого сельскохозяйственного производства / А.В. Медведев // Мелиорация в России: потенциал и стратегия развития. Матер. Межд. науч-практ. интернет-конф., посвященной 50-летию масштабной программы развития мелиорации земель. – Волгоград, 2016. С. 305-313.
38. Мелиоративные системы и сооружения: СНИП 2.06.03-85 / Гостстрой СССР. –М., 1986. -60с.
39. Мелихов В.В. Мелиорация – потенциал и стратегия развития АПК и сельских территорий России: Матер. Межд. науч.-практич. интернет-конферен., посвященной 50-летию масштабной программы развития мелиорации земель. Волгоград: 2016.С. 7-14.
40. Ольгаренко Г.В.,ДавшанС.М., Савушкин С.С.Сохранить парк дождевальных машин в Российской Федерации // Мелиорация и водное хозяйство. 2003. №5. С. 16-19.
41. Ольгаренко Г. В. Реализация программы импортозамещения в области производства техники полива в Российской Федерации // Мелиорация и водное хозяйство. 2018. №1С. 44-47.
42. Ольгаренко Г.В.,ГородничевВ.И., Алдошкин А.А. Ресурсосберегающие эффективные экологически безопасные технологии и технические средства орошения. Справочник. М.: ФГБНУ «Росинформагротех», 2015. 264 с.
43. Ольгаренко Г.В.,ДавшанС.М., СавушкинС.С. Перспективы использования серийной и новой поливной техники в АПК России.Коломна: ФГНУ ВНИИ «Радуга», 2008. 100с.
44. Пат. №2707919 Российская Федерация, МПК A01B 61/00, A01G 25/09, СПК A01B 61/00, A01G 25/09, A01B 69/002. Устройство определения угла поворота секции дождевальной машины кругового действия / С. М. Бакиров, Г. П. Ерошенко, В. А. Трушкин, Д. А. Соловьев, С. С. Елисеев; заявитель и патентообладатель ФГБОУ ВО Саратовский ГАУ имени Н. И. Вавилова (RU). — №2019103602; заявл. 08.02.2019; опубл. 02.12.2019 Бюл. №34 – 4 с.: ил.
45. Самардак А.С. Геоинформационные системы. Владивосток: ДальГУ: 2005. 124 с.
46. Стандарт организации испытаний сельскохозяйственной техники: Машины и установки дождевальные. СТО АИСТ 11.1 2010. Дата введения 2011–04–15.
47. СТО АИСТ 001–2010. Агротехническая оценка сельскохозяйственной техники. Термины и определения. ФГБНУ «Росинформагротех». М.: 2013. 60 с.
48. СТО АИСТ 11.1–2010. Испытания сельскохозяйственной техники. Машины и установки дождевальные. Методы оценки функциональных показателей / ФГБНУ «Росинформагротех». М.: 2012. 54 с.
49. СТО АИСТ 003–2010. Экономическая оценка сельскохозяйственной техники. Термины и определения. ФГБНУ «Росинформагротех». М.: 2013. 7 с.
50. Терехов В.А.,ЕфимовД.В., ТюкинИ.Ю. Нейросетевые системы управления: учеб. пособие для вузов. М.: Высш. Школа: 2002.183 с.
51. Труфляк Е. В. Основные элементы системы точного земледелия. Краснодар:КубГАУ, 2016. 39 с.
52. Щедрин В.Н.,КолгановА.В Оросительные системы России: от поколения к поколению: монография в 2ч. Новочеркасск, 2013. 283с.