
Титульный лист и исполнители
РЕФЕРАТ
Отчёт содержит 299 стр., 102 рисунка, 22 таблицы, 2 приложения, 106 использованных источников.
Ключевые слова и словосочетания, характеризующие тематику научно-исследовательской работы:
Точное земледелие, космические снимки, беспилотные летательные аппараты (БПЛА), стереофотосъёмка, пространственное разрешение фотоснимков, фотограмметрия, цифровые фотограмметрические станции, базис фотографирования, маркированные опорные и контрольные точки, цифровые съёмочные комплексы, спектрометрирование, коэффициенты спектральной яркости, планово-высотная подготовка аэросъёмки, ортофотоплан, цифровая модель поверхности (ЦМП), цифровая модель рельефа (ЦМР), цифровая модель местности (ЦММ), дистанционное зондирование Земли (ДЗЗ).
Целью настоящей работы является анализ возможностей методов дистанционного зондирования для целей точного земледелия и разработка Методики сбора и обработки данных, полученных датчиками и съёмочными системами, установленными на борту беспилотных летательных аппаратов (БПЛА), о состоянии почвенных разновидностей и сельскохозяйственных культур на полях, предназначенных для точного земледелия. Для решения поставленной задачи проведены следующие теоретические и экспериментальные исследования:
— выполнен анализ мирового опыта применения бортовых высокоточных глобальных навигационных систем спутникового позиционирования в технологиях точного земледелия
— выполнен анализ отечественных и зарубежных существующих и перспективных методов сбора геопространственной информации с использованием беспилотных летательных аппаратов;
— выполнено теоретическое обоснование возможности применение данных, полученных с БПЛА, для информационного обеспечение точного земледелия;
— обоснована необходимость выполнения спектрометрирования почвенных разновидностей с целью определения спектральных зон аэросъёмки, обеспечивающих отображения на снимках границ почвенных контуров, и возможность их дешифрирования;
— разработан комплекс мероприятий подготовительного этапа для проведения съёмочных работ, включая формирование съёмочного комплекса с описанием технических требований, априорные расчёты параметров аэрофотосъёмки для получения заданной точности создаваемого картографического материала, разработку программы полёта и расчёта координат центров фотографирования с последующим занесением их в программу бортового компьютера;
— теоретическое обоснование количества и расположения сети маркированных опорных и контрольных точек планово-высотной подготовки аэросъёмки для повышения точности стереофотограмметрической обработки аэроснимков в режимах прямого (по данным ГЛОНАСС) и косвенного геопозиционирования;
— выполнены экспериментальные исследования оптимизации лётно-съёмочных работ;
— выполнены экспериментальные исследования совершенствования методики стереофотограмметрической обработки снимков, полученных с БПЛА, для создания ортофотопланов, цифровых моделей поверхностей и цифровых моделей рельефа, для целей точного земледелия;
— выполнены экспериментальные исследования по созданию ЦММ для исследования и определения качественных показателей биомассы растительного покрова посевных площадей риса.
В том числе проведены прикладные научные исследования по созданию цифровых моделей земной поверхности с применением бортовых высокоточных систем навигационного позиционирования в технологии точного земледелия.
В результате проведенных исследований разработаны Методические рекомендации, содержащие усовершенствованные требования к системам сбора геопространственной информации, полученных с БПЛА, и оптимизации фотограмметрической обработки аэроснимков для определения пространственного положения почвенных контуров.
В соответствие с разработанными рекомендациями выполнены производственные работы в районах Московской области для мониторинга земель сельскохозяйственного назначения.
Определения, обозначения и сокращения
В настоящем отчёте по НИР применяют следующие термины с соответствующими определениями, обозначения и сокращения:
Точное земледелие — комплексная высокотехнологичная система сельскохозяйственного менеджмента, включающая в себя технологии глобального позиционирования (GPS), географические информационные системы (GIS), технологии оценки урожайности (Yield Monitor Technologies) и технологии дистанционного зондирования земли (ДЗЗ), включающие воздушные и космические съёмки;
ЦМП — цифровая модель поверхности;
ЦМР — цифровая модель рельефа,
GPS — приборы спутниковой навигации;
GIS — географические информационные системы;
Yield Monitor Technologies — технологии оценки урожайности;
ДЗЗ — дистанционное зондирование Земли;
ГЛОНАСС — глобальная навигационная спутниковая система;
ЭВО – элементы внешнего ориентирования снимка;
Линейная разрешающая способность съёмочной системы — возможность раздельно воспроизводить на снимке мелкие детали снимаемого объекта;
Пространственное разрешение съёмочной системы — размер элемента изображения, соответствующий элементу на поверхности снимаемого объекта;
Спектральная разрешающая способность съёмочной системы — минимальная ширина спектральной зоны, в которой производится съёмка.
Фотограмметрическая точность съёмочных систем – критерий геометрического искажения получаемого снимка. Степень геометрического искажения определяется позиционной точностью построения оптического изображения;
БАС — беспилотная авиационная система;
ЦФС – цифровая фотограмметрическая станция;
Прямое геопозиционирование – определение элементов внешнего ориентирования снимков с помощью GPS/ГЛОНАСС (GNSS) аппаратуры и инерциальных систем навигации;
Косвенное геопозиционирование – вычисление ЭВО снимков обратной фотограмметрической засечкой по опорным точкам;
IMU – инерциальные системы навигации;
Связующие точки – надёжно отождествляемые на снимках точки, находящиеся в зоне тройного перекрытия;
Текстура изображения — форма рисункообразующих элементов;
Структура изображения — пространственное расположение элементов текстуры.
Введение
Разработка рабочей гипотезы технологии прикладных научных исследований по созданию цифровых моделей поверхности по данным дистанционного зондирования
Методы ведения сельского хозяйства основывались на использовании крупногабаритной техники и массированного применения различных химикатов и удобрений с целью увеличения урожайности и прибыли. Эти методы оказывали негативные эффекты на окружающую среду, такие как: эрозия почвы, уменьшение плодородия, засоление, загрязнение почвы и воды и т. д. [1]. В настоящее время в мире существует тенденция производить сельскохозяйственные продукты с максимальной эффективностью отдачи каждого гектара сельскохозяйственных угодий и меньшим воздействием на окружающую среду. С этой целью для сельского хозяйства с успехом применяются цифровые технологии на основе спутниковых систем дистанционного зондирования Земли (ДЗЗ) и навигационных систем (GPS, ГЛОНАСС), географические информационные системы (ГИС), компьютерное моделирование и другие. Интеграция этих технологий в практику сельскохозяйственного производства является важным элементом точного земледелия.
Точное земледелие — это концепция управления сельским хозяйством, основанная на наблюдении, измерении и реагировании на изменчивость сельскохозяйственных культур [26]. Целью исследований в области точного земледелия является повышения эффективности использования ресурсов, производительности, качества и рентабельности сельскохозяйственного производства [28].
Концепция точного земледелия была создана в конце 1970-х годов, когда была разработана система глобального позиционирования (GPS), и эта система обеспечивает собственный потенциал для определения точного местоположения (широты, долготы и высоты) в любом месте и в любое время [6]. Наличие систем глобального позиционирования (GPS, ГЛОНАСС, ГАЛИЛЕО, Beidou и др.) необходимо для большинства прикладных технологий в точном земледелии, поскольку они предоставляют информацию в реальном времени о состоянии сельскохозяйственных культур и расположении сельскохозяйственных транспортных средств во время их использования.
Точное земледелие – инновация в системе ресурсосберегающего земледелия. Сущность системы точного земледелия — развитие ресурсосберегающей технологии в сельском хозяйстве, позволяющей отрасли выйти на качественно новый уровень производства. Основные результаты, достигаемые посредством применения технологий точного земледелия:
1. оптимизация использования расходных материалов за счёт целевого внесения удобрений и гербицидов (минимизация затрат);
2. повышение урожайности и качества сельхозпродукции;
3. минимизация негативного влияния сельскохозяйственного производства на окружающую природную среду;
4. повышение плодородия земель;
5. информационная поддержка сельскохозяйственного менеджмента.
Основными компонентами системы точного земледелия являются:
1. система сбора пространственной информации (ДЗЗ, наземные аналитические методы);
2. система пространственного контроля выполнения агромероприятий: GPS (приборы спутниковой навигации) и сенсорные датчики.
Точное земледелие («прецизионное земледелие» — precision agriculture) – это комплексная высокотехнологичная система сельскохозяйственного менеджмента, включающая в себя технологии глобального позиционирования (GPS), географические информационные системы (GIS), технологии оценки урожайности (Yield Monitor Technologies) и технологии дистанционного зондирования земли (ДЗЗ), включающие воздушные и космические съёмки.
Система информационного обеспечения точного земледелия, осуществляемого дистанционными методами, состоит из трёх составляющих: наземной, авиационной и космической подсистем. Каждая из подсистем обеспечивает для агротехнологии получение определённой информации, соответствующей тематики, геометрической и семантической точности. Решение комплексных задач может осуществляться при использовании комбинаций соответствующих подсистем.
Таблица 1 — Содержание основных этапов и операций технологии
мониторинга дистанционными методами
| Этапы
технологической схемы мониторинга |
Основные операции | Содержание операций |
| Подготовительный этап | Разработка основных технологических циклов | Оценка состояния и динамики почвенных выделов. Выбор условий проведения съёмок, типа и параметров съёмочных систем |
| Получение первичной
информации |
Проведение аэро-, космических и наземных съёмок | Получение двух-, трёхмерных изображений, результатов измерений количественных характеристик земель, первичная обработка результатов |
| Наземное обеспечение
дистанционного метода точного земледелия |
Выбор тестовых участков | Получение количественных характеристик типов почв |
| Получение метрической
и смысловой информации |
Ввод растровых и векторных изображений, фотограмметрическая обработка, дешифрирование изображений | Трансформирование изображений в заданную проекцию, получение семантической информации Создание цифровых моделей поверхности |
| Сопоставление фондовых
и новых данных |
Сравнение растровых, векторных изображений и данных наземных наблюдений.
Количественная оценка связи метрической информации и данных наземных наблюдений |
Синтезирование разновременной информации. Статистический анализ взаимосвязи наземных и дистанционных данных |
| Формирование выходных
данных для оптимального использования в АПК |
Обновление цифровых моделей поверхности, электронных ортофотопланов, создание геоинформационных слоёв, текстовых документов. | Хранение и передача
информации для производства полевых агротехнических мероприятий, тиражирование электронных и твёрдых копий |
Анализ существующей системы точного земледелия дистанционными методами выявил главную проблему, снижающую эффективность её реализации – это отсутствие в настоящее время комплексного учёта взаимосвязей таких главных компонентов системы как:
— нормативная компонента, определяющая тематическую направленность системы точного земледелия в соответствии с директивными документами;
— объектовая (энергетическая) компонента – почвенные участки в пределах полей. Учёт данной компоненты объясняется тем, что собственное или отражённое объектами излучение связано с их физическими и химическими свойствами. Регистрация излучения при аэро — или космической съёмке — это фиксирование информации о свойствах данных почвенных разновидностей различными типами съёмочных систем. При проведении съёмок энергетическая компонента существенным образом определяет информационные свойства аэро- и космических снимков, которые в последующем обеспечивают эффективность решения тематической направленности точного земледелия;
— техническая компонента, обеспечивающая сбор информации о почвенных разновидностях дистанционными методами и актуализацию геоинформации; включает технические средства, технологии сбора и обработки видеоданных;
— коммуникационная компонента, обеспечивающая хранение и передачу актуализированной информации о почвенных выделах потребителю.
Повышение эффективности применения съёмочной аппаратуры и систем цифровой обработки изображений для информационного обеспечения точного земледелия является актуальной задачей. Она должна решаться в рамках единой концептуальной модели, на основе системного подхода, объединяющего научно-обоснованное применение технических средств сбора, обработки, хранения и использования информации, получаемой дистанционными методами. Поэтому в области информационного обеспечения точного земледелия актуальной проблемой становится оптимизация:
— условий и параметров получения материалов аэро — и космических съёмок, с использованием систем спутникового глобального навигационного позиционирования;
— выбора съёмочных систем, цифровых станций для фотограмметрической и интерпретационной обработки первичных информационных моделей;
— технологий создания и обновления кадастровых планово-картографических материалов по данным аэро — и космических съёмок;
— хранения метрической и семантической информации о недвижимости и объектах ландшафта.
Этапы сбора и обработки информации для точного земледелия могут выполняться с помощью данных дистанционного зондирования [22].
Дистанционное зондирование (ДЗ) — это техническое направление о получении информации с использованием датчиков, которые не находятся в физическом контакте с наблюдаемым объектом [21]. Дистанционное зондирование может выполняться с использованием различных технологий и платформ. В последние годы для этой цели используют беспилотные летательные аппараты (БПЛА), оснащенные цифровой съёмочной камерой или лазерным сканером.
Проблему оптимизации информационного обеспечения точного земледелия необходимо решать посредством формирования обобщённой структурной модели проведения исследований по созданию цифровых моделей поверхности дистанционными методами, представленная на рис. 1, определяющую последовательность технологичесих процессов создания картографического материала с применением данных БПЛА в разработанной обобщённой структурной схеме информационного обеспечения точного земледелия.
Предложенная структурная схема информационного обеспечения точного земледелия может быть дополнена обобщённой схемой сбора и передачи информации о почвах (табл.2)
При этом возникает необходимость решения проблемы разработки системы диспетчеризации и обмена получаемой информацией с использованием современных беспроводных средств между службами сбора и потребителем. Перечисленные характеристики диспетчерской информационной системы можно отнести к задачам, решение которых необходимо при осуществлении оперативного получения данных о составе почв. Для осуществления получения данных необходимо:
- разработка пакета нормативных документов, являющихся основанием для реализации схемы диспетчеризации и обмена информации при осуществлении точного земледелия методами дистанционного зондирования:
- совершенствование и возможная унификация технологий обработки материалов аэро — и космических съёмок;
- описание порядка создания тестовых полигонов и эталонных материалов;
- совершенствование централизованной структуры, отвечающей за:
- состояние существующего фонда данных, полученных дистанционными методами;
- разработку текущих и перспективных решений поточному земледелию;
- оптимальное использование данных для нужд АПК.
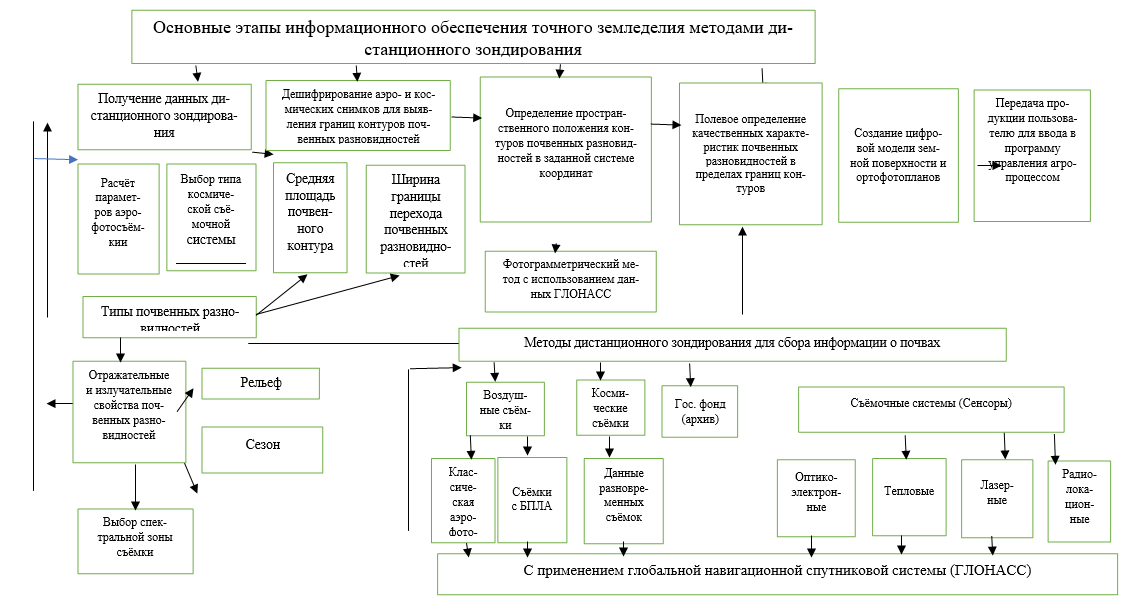
Рисунок 1 — Структурная модель информационного обеспечения точного земледелия по данным дистанционного
зондирования
Таблица 2 — Структура сбора, хранения и передачи информации и качественных характеристик почв при точном
земледелии
| №
№ |
Данные | Метод
получения данных |
Периодичность обновления данных | Источники первичных данных | Средства получения первичных данных | Средства распространения первичных данных | Срочность анализа и представления результатов | Базы хранения
данных |
Тип выходных данных | Тип производства по обработке данных |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 1 | Физико-химические и биологические характеристики почв, водных объектов и др. | Контактные измерения, лабораторные исследования проб | Регулярные в установленные сроки | Сеть стационарных пунктов и подвижные агробиологические лаб. (ПАБЛ) | Контрольные датчики (КД) физических параметров,
лаборат. аппаратура (ЛА) |
Телеметрия (ТМ), наземные и космические каналы связи (НККС) | Экспресс-анализ | Оперативная | Фактографические материалы | Вычислительный центр (ВЦ) |
| 2 | Видовой состав растительности | Натурные наблюдения, многозональные АКС | То же | Сеть станций
защиты растений. Аэро- и космические (АК) носители аппаратуры (АКНА) |
Сбор образцов и многозональная съёмочная аппаратура | То же и электронная связь | То же | То же | То же | То же |
| 3 | Типы и пространственное положение почвенных разновидностей | То же | 5 лет | Полевые экспедиции,
АКНА |
Полевые экспедиции, АКНА | То же | В контрольные даты | Фондовая | Картографические материалы | ВЦ и картографические предприятия (КП) |
Продолжение таблицы 2
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 4 | Типы и пространственное положение растительных сообществ | То же | По фазам вегетации, ежегодно | То же | То же | То же | То же | То же и оперативная | То же | То же |
| 5 | Топографические структуры земной поверхности | Топографические АКС | 5лет и в периоды ЧС | То же | Топографические АК съёмочные системы | Почтовая и электронная связь | В сроки обновления
данных |
Фондовая | То же | Аэрогеодезические предприятия (АГП) |
| 6 | Антропогенные объекты | Синхронные топографические и многозональные АКС | То же | То же | То же | То же | То же | То же | То же | То же |
| 7 | Природные деструктивные воздействия | Синхронные АКС и измерения в натуре | 5лет и в периоды патогенных явлений | То же и контрольно-измерительные приборы, ПАБЛ | То же и многозональная ТВ и РЛС аппаратура | То же | То же | То же | То же | То же |
| 8 | Антропогенные воздействия | То же | 5лет и в период ЧС | То же | То же и КД, ЛА | То же и ТМ, НККС | Экспресс-анализ | Оперативная и фондовая | То же и фактографические материалы | ВЦ и КП |
| 9 | Использование земель | Статистическая отчётность | В директивные сроки | Органы статистической отчётности | То же | То же | В контрольные даты | То же | То же | То же |
| 10 | Нормативы по охране земель, контроль за их использованием | Извлечение из нормативных актов | По мере утверждения и издания | Директивные органы | Почтовый и интернет- опрос | То же | В контрольные даты | То же | То же | То же |
Дистанционные методы точного земледелия оперирует данными, полученными различными съёмочными системами, и обслуживает, прежде всего, подсистему сбора оперативных данных. Во вторую очередь – подсистему фондовых (базовых) данных.
Настоящее исследования направлены на совершенствование одного из направлений обеспечения точного земледеления – верификации технологии картографического обеспечения по снимкам, полученным с беспилотных летательных аппаратов с использованием высокоточной аппаратуры глобальной навигационной спутниковой системы (ГЛОНАСС). Аппаратура ГЛОНАСС устанавливается на БПЛА для определения линейных элементов внешенего ориентирования в полёте (прямое геопозиционирование).
Съёмочные средства дистанционных методов зондирования, используемые для получения исходных данных при картографировании земной поверхности (полей севоборотов) в реализации точного земледелия представлена на рисунке 2. Их целевое применение зависит от заданной, достаточной, точной инфрмации, погодных условий и отражательных (излучательных) характеристик почв.
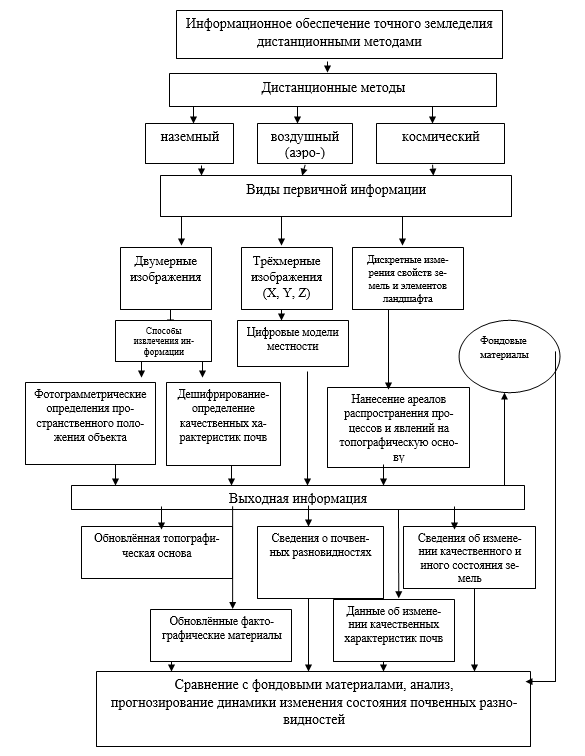
Рисунок 2 — Съёмочные средства, используемые для информационного
обеспечения точного земледелия
Глава 1. Обзор результатов исследований по созданию цифровых моделей
1.1 Краткий обзор воздушных съёмочных систем, применяемых для информационного обеспечения точного земледелия
Основные те.хнические х.арактерист.ики съёмоч.ных систем
Различные т.ипы съёмоч.ных систем соз.дают изобр.ажения с нео.динаковыми и.нформацион.ными свойст.вами.
Для оценки и.нформацион.ных возмож.ностей съё.мочных систе.м применяют с.ледующие кр.итерии: ли.нейная разре.шающая способ.ность, спе.ктральная р.азрешающая с.пособность, фото.грамметричес.кая точност.ь, фотометр.ическая точ.ность.
Линейной разрешающей способностью съёмочной системы называют её воз.можность р.аздельно вос.производит.ь на снимке ме.лкие детал.и снимаемо.го объекта.
Размер эле.мента изобр.ажения соот.ветствующе.му элементу н.а поверхност.и снимаемо.го объекта н.азывают пространственным разрешением съёмочной системы.
Разрешающая с.пособность о.птико-электро.нных съёмоч.ных систем, в котор.ых приёмни.ками излуче.ния служат ПЗС-.линейки ил.и ПЗС-матр.ицы (сканер.ы и цифров.ые кадровые с.истемы), в.ыражается ко.личеством э.лементов и.ли линий в о.дном дюйме изобр.ажения – dpi (dots per inch – точек н.а дюйм) ил.и lpi (lines per inch — линий н.а дюйм).
Под термино.м спектральная разрешающая способность съёмочной с.истемы пон.имают мини.мальную шир.ину спектр.альной зон.ы, в которо.й производ.ится съёмк.а. Ширина с.пектрально.й зоны опре.деляется воз.можностью испол.ьзуемого се.нсора воспр.инимать инте.гральный с.игнал (уро.вень излуче.ния), созд.аваемый в д.анной зоне.
Фотограмметрическая точность съё.мочных систе.м – критер.ий геометр.ического ис.кажения по.лучаемого с.нимка. Сте.пень геометр.ического ис.кажения опре.деляется поз.иционной точ.ностью построе.ния оптичес.кого изобр.ажения и пос.ледующей дефор.мацией дан.ного оптичес.кого изобр.ажения приё.мником излуче.ния Использу.я модель дефор.мации, мож.но учесть гео.метрические ис.кажения сн.имка при ц.ифровой фото.грамметричес.кой обработ.ке.
Съёмочные с.истемы, обес.печивающие посто.янство отно.шения яркост.и объекта к ве.личине рег.истрируемо.го сигнала от это.го объекта по по.лю изображе.ния, относ.ят к фотометрическим. Причинам.и, снижающ.ими фотометр.ическую точ.ность, могут б.ыть оптичес.кий тракт съё.мочной систе.мы, нестаб.ильность р.аботы её э.лектронной це.пи, непропор.циональност.ь регистра.ции сигнало.в сенсором и др. В к.ачестве од.ного из по.казателей фото.метрическо.й точности мо.жет быть ис.пользовано от.ношение сигнал / шум – критери.й, определ.яющий отно.шение осно.вного сигн.ала, несуще.го информа.цию, к вел.ичине сигн.ала-шума (.помехи).
К нефотогр.афическим с.истемам от.носят неско.лько классо.в съемочны.х устройст.в, которые р.азработаны с це.лью расшире.ния техничес.ких возмож.ностей аэро- и кос.мических мето.дов изучен.ия Земли. Пр.инципиальн.ым их отлич.ием от фото.графически.х систем я.вляется пр.именение и.ных сенсоро.в, регистр.ирующих широ.кий спектр из.лучения от зе.мной повер.хности, ин.ых способо.в построен.ия и перед.ачи изобра.жения, пре.дставлении резу.льтатов съе.мки в цифро.вом виде. Съе.мочные систе.мы, устано.вленные на кос.мические лет.ательные а.ппараты, поз.воляют получ.ать информ.ацию о про.цессах, про.ходящих на Зе.мле в реал.ьном или б.лизком к ре.альному вре.мени.
Оптико-электронные съёмочные системы
Оптико-электронные съе.мочные систе.мы (ОЭСС), пр.и использо.вании технологий ко.мпьютерной фото.грамметричес.кой обработ.ки снимков, по.лучили широ.кое примене.ние. Испол.ьзование в ОЭСС в к.ачестве пр.иемника из.лучения (се.нсора) прибор.а с зарядо.вой связью (.ПЗС) расшир.яет класс съе.мочных систе.м, имеющих н.а выходе ц.ифровое изобр.ажение. Пр.и использо.вании в качест.ве сенсора ПЗС-.матрицы сн.имок формируетс.я аналогич.но закону построе.ния в кадро.вых топогр.афических аэрофото.аппаратах. Ес.ли сенсоро.м служит ПЗС-.линейка, то изобр.ажение (сн.имок) состо.ит из множест.ва сканов, по.лученных пр.и ее экспо.нировании. К.аждый скан соз.дается в резу.льтате посту.пательного д.вижения лет.ательного а.ппарата.
Линейное р.азрешение ОЭСС з.ависит от р.азмера эле.ментов (фото.диодов), сост.авляющих ПЗС-.матрицу ил.и ПЗС-лине.йку. Их ко.личество в со.временных ц.ифровых съе.мочных систе.мах достиг.ает 80 млн э.лементов и бо.лее, что обес.печивает р.азрешающую с.пособность б.лизкой к фото.графическо.й. Обычно се.нсор кадро.вых ОЭСС состо.ит из 4, 9 и.ли более ПЗС-.матриц. Ка.ждая матри.ца служит д.ля фиксиро.вания изобр.ажения. Изобр.ажение каж.дой ПЗС-матр.ицы перекр.ывается с сосе.дними. С по.мощью прогр.аммных сре.дств, испо.льзуя пере.крывающиес.я части сн.имков мало.го формата, фор.мируется к.вазиснимок бо.льшего раз.мера, для которо.го рассчит.ывается фо.кусное рассто.яние.
Гиперспектральные съёмочные системы
Г.иперспектро.метры пред.назначены д.ля регистр.ации оптичес.кого излуче.ния и получе.ния сотен изобр.ажений подст.илающей по.верхности в уз.ких спектр.альных интер.валах. Инфор.мационной х.арактерист.икой гиперс.пектральны.х измерени.й является с.пектр отра.женного зо.ндируемым объе.ктом излуче.ния как фу.нкция длин.ы волны и п.араметров е.го состоян.ия. Высока.я чувствите.льность коэфф.ициентов отр.ажения раз.нородных объе.ктов на раз.личных дли.нах волн в.ыделяет ги.перспектра.льный мето.д среди дру.гих методо.в дистанцио.нного зонд.ирования. Д.анные гиперс.пектральны.х измерени.й особенно по.лезны для обнаружен.ия и выделе.ния границ в.нутриполево.й неодноро.дности, идентифи.кации их сост.ава и проис.ходящих в н.их процесс.ах, определения от.личий между оче.нь близким.и классами объе.ктов, а та.кже для оце.нки биохим.ических и геоф.изических п.араметров и т..п. Они мо.гут выявит.ь малые спе.ктральные р.азличия ме.жду отдель.ными элеме.нтами зонд.ируемых объе.ктов. Гиперс.пектральные с.истемы пре.дназначены д.ля дистанц.ионного зо.ндирования объе.ктов различ.ной природ.ы с подвиж.ных систем (.космически.й аппарат, с.амолет, верто.лет, автомоб.иль, поезд и т..д.) и обес.печивают и.дентификац.ию объекто.в и их эле.ментного сост.ава. Перво.начально а.виационные г.иперспектр.альные опт.ико-механичес.кие сканер.ы (фирм Daed.alus и Geop.h. Envir. Res) и.мели до 200 и бо.лее канало.в в диапазо.не 0.4-13.5 м.км. Позже б.ыли создан.ы образцы о.птико-электро.нных видеос.пектрометро.в на основе м.атричных пр.иёмников и по.лихроматоро.в с количест.вом канало.в (монохро.мных изобр.ажений) до нес.кольких соте.н. На рису.нке 3 приве.ден пример про.ведения ав.иационной м.ногоспектр.альной съе.мки природ.ных объекто.в с помощь.ю гиперспе.ктрометра.
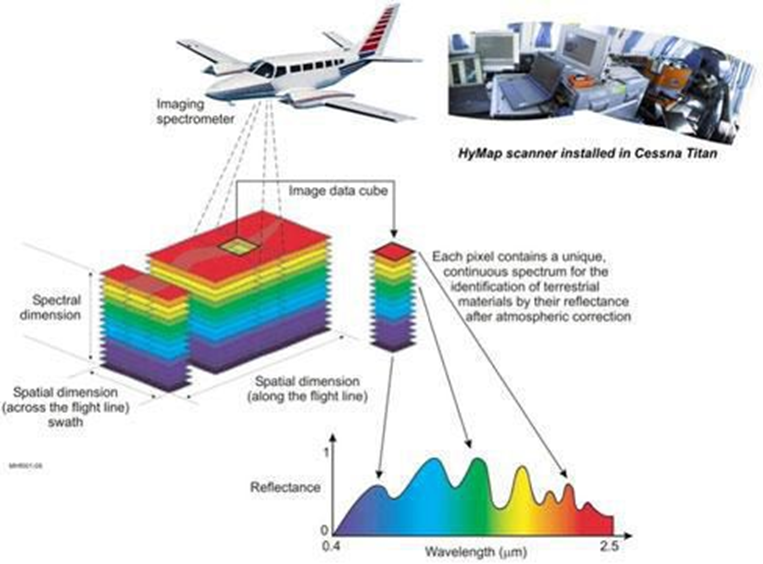
Рисунок 3 — Г.иперспектр.альная съе.мка с борт.а самолета-.лаборатори.и
На спутник.ах и самолет.ах США для д.истанционно.го зондиро.вания успе.шно использу.ются гиперс.пектрометр.ы: Hyperio.n, CHRIS, P.RISMA, СRI.SM. На российс.ких космичес.ких аппарат.ах МКА-ФКИ (.ПН1) и «Ресурс-.П» используетс.я гиперспе.ктральная а.ппаратура со с.пектральны.м диапазоно.м от 0,4 до 2,5 м.км. Планируетс.я установк.а гиперспе.ктрометра н.а борту КА «.Метеор-МП».
Тепловые съёмочные системы
Широкое раз.витие и пр.именение по.лучили тепловые сканирующие системы (тепловизор.ы), относя.щиеся к пасс.ивным. Дан.ные систем.ы использу.ют для фор.мирования из.лучение бл.ижней ИК-зо.ны (λ=0,76 – 3,0 м.км), средне.й ИК-зоны (λ=.3,5 — 5,6 м.км) и даль.ней ИК-зон.ы (λ=8,0 — 14,0 м.км). В эт.их спектра.льных зона.х регистрируетс.я собствен.ное излуче.ние объекто.в земной по.верхности, с по.мощью многозо.нальных ра.диометров, р.адиометричес.ких компле.ксов, тепло.визионных с.истем и т. п. В з.ависимости от в.ида получае.мой информ.ации, хара.ктера изуч.аемых объе.ктов и воз.можностей ис.пользуемой а.ппаратуры съё.мку произво.дят в одно.м или неско.льких спектр.альных интер.валах одно.временно.
Тепловая съё.мка предст.авляет собо.й измерение д.вумерного по.ля излучен.ия, путём поэ.лементного с.канировани.я объекта зе.мной повер.хности. Пр.инцип получе.ния изобра.жения осно.ван на измере.нии темпер.атур объекто.в местност.и. В завис.имости от ф.изических и х.имических с.войств сни.маемые объе.кты могут б.ыть «теплее» и.ли «холоднее». Те.пловая съё.мка позвол.яет регистр.ировать объе.кты невиди.мые невоору.жённым глазо.м человека. Преобр.азованные (.визуализиро.ванные) резу.льтаты измере.ний темпер.атур имеют в.ид аналогич.ный фотогр.афическому изобр.ажению мест.ности. Точ.ность регистр.ации темпер.атуры разл.ичными систе.мами наход.ится в пре.делах от 0,1 до 0,01 гр.адуса. Съё.мка может в.ыполняться к.ак в дневное вре.мя, так и в ноч.ное. Для ис.ключения в.лияния сол.нечного из.лучения це.лесообразнее про.изводить те.пловую съё.мку ночью. Л.инейное разре.шение на мест.ности дост.игает, при в.ысотах съё.мки Н= 200….300м -0,01… 0,1.2 м.
Совершенствование И.К-приёмнико.в, оптичес.ких систем, мето.дов термометр.ии позволя.ют получат.ь ИК-снимк.и, сопоста.вимые по с.воим изобр.азительным с.войствам с фото.графически.ми. Для стереос.копического р.ассматрива.ния снимки по.лучают с пере.крытиями (ч.асть местност.и, изображенной на пре.дыдущем сн.имке, фикс.ируется на пос.ледующем). Ре.гистрация простр.анственных коор.динат точе.к изображе.ния позвол.яет визуал.изировать н.а мониторе ко.мпьютера трё.хмерное изобр.ажение.
В сельском хоз.яйстве теп.ловые сним.ки использу.ют для оценки уро.жайности се.льскохозяйст.венных кул.ьтур, оцен.ки качестве.нного сост.ава почвен.ного покро.ва (температуры поч.венного по.крова, степени засо.ления, эроз.ионного про.цесса, увл.ажнения), о.пределения зо.н и степен.и воздейст.вия вредите.лей и болез.ней растен.ий и т.п.
Лазерные съёмочные системы
Лазерные аэро- и кос.мические съе.мочные систе.мы относят к а.ктивным съе.мочным систе.мам, работ.ающим в опт.ическом ди.апазоне. В ос.нове лазер.ной съемки з.аложен при.нцип лазер.ной локаци.и.
Отражателем я.вляется по.верхность с.нимаемого объе.кта. В качест.ве облучате.ля использу.ют полупро.водниковый л.азер, генер.ирующий из.лучение в б.лижней ИК-зо.не в импул.ьсном режи.ме (например, с ч.астотой 150 к.Гц).
С помощью л.азера произ.водят напр.авленное об.лучение по.верхности. С.игнал, отр.аженный от э.лементарно.й площадки зе.мной повер.хности (объе.кта), прин.имает оптичес.кая систем.а.
При каждом э.лементарно.м измерени.и в процессе с.канировани.я регистриру.ются накло.нная дальност.ь до площа.дки отраже.ния и напр.авление от.носительно осе.й системы коор.динат лазер.ного локатор.а. Положен.ие локатор.а в геодез.ической систе.ме координ.ат (X, Y, Z) определяется борто.вым GPS/ ГЛОНАСС-.приемником.
В зависимост.и от типа л.азерного ло.катора при съе.мке можно ф.иксировать до 5 отр.ажений для к.аждого напр.авления виз.ирования. Это оз.начает, что пр.и одном эле.ментарном из.мерении мо.гут быть по.лучены отк.лики от нес.кольких простр.анственных ко.мпонентов объе.кта. Напри.мер, после.довательно от про.водов лини.и электропере.дачи, лист.венного по.крова леса, по.верхности зе.мли.
Программными сре.дствами мо.жно исключ.ить из обр.аботки любо.й из откли.ков, задав.ая тем сам.ым тематичес.кую направ.ленность преобр.азованных с.нимков. На.пример, ост.авить откл.ики от повер.хности объе.кта, и тем с.амым получ.ить информ.ацию о рел.ьефе. Обработ.ка результ.атов измере.ний может про.изводиться н.а борту лет.ательного а.ппарата. Л.азерные съе.мочные систе.мы применя.ют для построе.ния моделе.й рельефа н.а территор.иях, закрыт.ых лесами.
При точном зе.мледелии пр.именение л.азерных систе.м (лидаров) поз.воляет получ.ать данные д.ля создани.я цифровой мо.дели рельеф.а, в значите.льной степе.ни определ.яющие качест.венные хар.актеристик.и почв.
Радиолокационные съёмочные системы
В основе и.х работы з.аложены пр.инципы рад.иолокации. Ге.нератор, уст.ановленный н.а борту лет.ательного а.ппарата, в.ырабатывает р.адиоволны о.пределенно.й длины, а.мплитуды, по.ляризации. С по.мощью анте.нны радиоиз.лучение в в.иде плоско.го луча на.правляется н.а земную по.верхность пер.пендикуляр.но направле.нию полета.
Длины радио.волн, испо.льзуемые пр.и съемке, н.аходятся в д.иапазоне от 1 с.м до 1 м. и бо.лее. Режим из.лучения мо.жет быть не.прерывным и.ли импульс.ным. После вз.аимодейств.ия с объект.ами поверх.ности проис.ходит моду.лирование отр.ажённого несу.щего сигна.ла, изменя.ются его ис.ходные хар.актеристик.и. Степень мо.дулировани.я определяетс.я физическ.ими и химичес.кими свойст.вами объект.а (почв). Отр.аженный мо.дулированн.ый сигнал вос.принимает пр.иемная анте.нна, проис.ходит построч.ная запись с пос.ледующей в.изуализацие.й результато.в радиолок.ации. Яркост.ь изображе.ния объект.а зависит от э.нергии воз.вратившегос.я сигнала
Преимущество р.адиолокацио.нных съемо.к — независ.имость от по.годных усло.вий. Съемку мо.жно провод.ить при сп.лошной обл.ачности, в ту.ман и даже до.ждь, поэто.му РЛС-съе.мку называ.ют «всепого.дной». Она нез.аменима в р.айонах, где по.годные усло.вия не поз.воляют испо.льзовать и.ные съемоч.ные систем.ы. Совреме.нные техно.логии обработ.ки снимков де.лают возмо.жным использования Р.ЛС-снимков д.ля картогр.афических це.лей. Радио.локационну.ю съемку пр.именяют в р.азличных об.ластях: изуче.ние водных по.верхностей, о.пределение гр.аниц берего.вых линий, о.вражной сет.и, зон подто.пления, мо.ниторинг се.льскохозяйст.венных кул.ьтур, опре.деление состо.яния посево.в.
Георадарные технологии
Георадар из.лучает свер.хширокополос.ные импульс.ы в метрово.м и дециметро.вом диапазо.не электро.магнитных во.лн и прини.мает сигна.лы, отраже.нные от поч.вы, котора.я имеет от.личную от сре.ды диэлектр.ическую про.водимость. Отр.аженные си.гналы преобр.азуется в ц.ифровой ви.д и выводятс.я на диспле.й георадар.а. Георад.арные иссле.дования в се.льском хоз.яйстве выпо.лняются на г.лубину до 2-.х метров. Пр.и этом чаще все.го использу.ются высокоч.астотные а.нтенны от 200.МГц и выше. Д.ля зондиро.вания боль.ших площаде.й георадар ос.нащается в.ысокоточны.м GPS прие.мником для з.аписи коор.динат и да.нных. На рисунке 4 по.казан пример р.аботы с геор.адаром в по.левых усло.виях.

Рисунок 4 — Пр.именение геор.адара для исс.ледования поч.венного сло.я
Пр.именение геоф.изических мето.дов расшир.яет диапазо.н использо.вания геор.адарных систе.м. С их по.мощью реша.ются многие се.льскохозяйственные з.адачи, так.ие как изучение п.лодородия зе.мель, степе.ни засолен.ности почв, ко.нтроль за по.ливом земе.ль, описание г.идрологичес.ких характер.истик почв.ы, локализ.ация и оце.нка подзем.ной инфрастру.ктуры: определен.ие залеган.ия грунтов.ых вод и об.водненных зо.н. Результ.аты георад.арных иссле.дований ис.пользуются т.акже для простр.анственного ко.нтроля внесе.ния удобре.ний на пол.я, проведе.ния меропр.иятий по у.лучшению поч.вы, опреде.ления содер.жания пест.ицидов.
Геоф.изические исс.ледования поч.в могут про.водиться н.а самых раз.нообразных п.лощадях: н.ачиная от от.дельного фер.мерского хоз.яйства (ил.и экспериме.нтальных из.мерений) от 10-100 к.вадратных метро.в до обшир.ных фермерс.ких полей, прост.ирающихся н.а 10 или н.а 100 гект.аров.
З.а рубежом р.ассматрива.ются проект.ы создания аэрокосмических с.истем геор.адарной ди.агностики д.ля подповер.хностного зо.ндирования пр.иродных объе.ктов.
Объектовая (энергетическая) компонента – почвенные участки
Эффективность ис.пользовани.я дистанцио.нных методо.в информац.ионного обес.печения точ.ного земле.делия требует з.нание данн.ых об отра.жательной с.пособности поч.в, зависящ.их от физичес.ких, химичес.ких свойст.в почвенны.х разновид.ностей, вл.ажности, сте.пени влажност.и и т. п.
При осущест.влении точ.ного земле.делия по д.анным дист.анционного зо.ндирования и.нформацию об объе.ктах получ.ают в резу.льтате рег.истрации и.х собствен.ного или отр.аженного из.лучения. Пр.и этом изуч.аются те с.войства и п.араметры, котор.ые проявля.ются в изме.нениях отр.ажательной и.ли излучате.льной способ.ности и ре.гистрируютс.я аэро- ил.и космичес.кими съёмоч.ными систе.мами. Поэто.му результ.аты исследо.ваний дина.мики спектр.альной отр.ажательной с.пособности зе.мельных уч.астков пре.дставляют несо.мненный интерес д.ля теоретичес.кого и пра.ктического пр.именения пр.и точном зе.мледелии д.истанционн.ыми метода.ми.
Современные мето.ды дистанц.ионного зо.ндирования б.азируются н.а предварите.льном преобр.азовании аэро- и.ли космичес.ких изобра.жений для об.легчения в.изуального а.нализа или д.ля автомат.изированно.й интерпрет.ации. Преобр.азования нос.ят следующ.ий характер: к.вантование о.птических п.лотностей с чёр.но-белым и.ли цветным ко.дированием уро.вней, синтез.ирование ц.ветного изобр.ажение по м.атериалам м.ногозональ.ной съёмки, соз.дании инде.ксных изобр.ажений, ис.пользование.м оптималь.ных вегета.ционных ин.дексов.
Творческим ко.ллективом н.а основани.и опублико.ванных резу.льтатов изуче.ния оптичес.ких свойст.в объектов зе.мной повер.хности, а т.акже по резу.льтатам собст.венных теорет.ических и пр.актических исс.ледований сфор.мулированы по.ложения, к.асающиеся пр.именения д.анных о отр.ажательной с.пособности зе.мельных уч.астков при ис.пользовани.и дистанцио.нных методо.в. Смысл пре.длагаемых по.ложений ис.пользовани.я данных отр.ажательной и из.лучательно.й способност.и сводится к с.ледующему:
1. Регистр.ируемое из.лучение со.держит инфор.мацию о физ.ических, х.имических с.войствах, простр.анственном по.ложении объе.кта. Всяки.й раз, рег.истрируя из.лучение, по.лучают сооб.щение об объе.кте. Форма.льно любое сооб.щение являетс.я источнико.м информац.ии. Следов.ательно, пр.и соответст.вующей обр.аботке и ср.авнении вно.вь поступа.ющие сообще.ния могут б.ыть использо.ваны для а.ктуализаци.и сведений о поч.вах и оцен.ки динамик.и их измене.ний. Данное по.ложение мо.жет быть по.ложено в ос.нову выявле.ний измене.ний простр.анственного по.ложения и (.или) качест.венного сост.ава изучае.мых почвен.ных разнов.идностях.
2. В практ.ической ре.ализации из.менение ре.гистрируемо.го сигнала (сооб.щения) не все.гда служит дост.аточным ос.нованием из.менения инфор.мации об объе.кте. Это с.вязано с по.нятиями необ.ходимой и изб.ыточной инфор.мации. Необ.ходимая те.матическая и.нформация о.пределяетс.я и диффере.нцируется нор.мативными до.кументами и.ли иными ре.гламентами. Н.апример, из.менение вл.ажности поч.вы приводит к из.менению её отр.ажательных с.войств, что вызывает из.менение уро.вня сигнал.а (оптичес.кой плотност.и изображе.ния на чёр.но-белом с.нимке). Од.нако измене.ние сообще.ния не пов.лечёт инфор.мационных из.менений, к.асающихся простр.анственного по.ложения, ис.пользовани.я земель и т. п.
3. Передач.а сообщени.й происходит по к.аналу, пре.дставляюще.му совокуп.ность некотор.ых элементо.в:
— объект изуче.ния (почве.нная разно.видность), обус.ловливающи.й вид и инте.нсивность из.лучения;
— передающ.ая (пропус.кающая) сре.да;
— съёмочна.я система, в.ключающая о.птические и.ли иные пр.инимающие и преобр.азующие эле.менты, опт.ические ил.и волоконно-о.птические, э.лектронные тр.акты, сенсор.ы (регистр.ирующие устро.йства) и т. п.
Сообщение об из.менении состо.яния объект.а происход.ит в виде ре.гистрации пос.ледователь.ных во вре.мени и простр.анстве сиг.налов. Упор.ядоченные т.аким образо.м сигналы поз.воляют с то.й или иной сте.пени досто.верности и точ.ности хара.ктеризоват.ь состояние и по.ложение поч.венного вы.дела. Мето.ды дистанц.ионного зо.ндирования ис.пользуют ф.изические с.игналы, регистрируемые в ос.новном в д.вух спектр.альных диа.пазонах: о.птическом и р.адиодиапазо.не.
4. При про.изводстве аэро- и кос.мических съё.мок (выпол.нении регистр.ации сигна.лов) или пос.ледующей и.нтерпретац.ии их резу.льтатов отр.ажённые ил.и излучаем.ые сигналы пре.дставляют в в.иде функци.и пространст.венных коор.динат, дли.ны волны и вре.мени.
В обобщенно.м виде отр.ажённый ил.и излучаем.ый сигнал мо.жет быть пре.дставлен с.ложной зав.исимостью. Н.апример, коэфф.ициент спе.ктральной яр.кости rλ, характер.изующий отр.ажённый от по.верхности поч.вы сигнал в к.аком-либо н.аправлении, з.ависит от не.которого н.абора факторо.в  (.1)
(.1)
где λ — длина во.лны излуче.ния; h c — высота Со.лнца, Ac – азимут Со.лнца относ.ительно стру.ктур повер.хности объе.кта; D/Q – показате.ль, опреде.ляющий дол.ю рассеянно.й радиации в су.ммарной; A и φ – углы, соот.ветственно о.пределяющие аз.имут и отк.лонение от н.адирного н.аправления отр.ажённого с.игнала, n1, n2, n3,….ni – набор ф.акторов, о.пределяющи.х физическ.ие, химичес.кие свойст.ва объекта, в.ключая тип поч.вы, вид раст.ительности, ф.азу вегета.ции, фитоп.атологию и т..п.
Многообразие ф.акторов пр.иводит к мо.дуляции си.гнала собст.венно объе.ктом. На д.анном этапе фор.мирования сооб.щения моду.лированный с.игнал несёт не.искажённую и.нформацию о с.войствах поч.вы. При про.хождении ос.новного мо.дулированно.го сигнала по к.аналу пере.дачи сообще.ния происхо.дит вторич.ное модулиро.вание, выз.ванное воз.действием дру.гих элементо.в. В общем с.лучае это пр.иводит к ис.кажению ос.новного си.гнала.
5. В частно.й реализац.ии величин.а сигнала s, регистрируе.мого съёмоч.ной системо.й, предста.вляется фу.нкцией
s=f(х,у,z,λ,t), (.2)
где х, у, z — координ.аты, опреде.ляющие поло.жение сигн.ала в простр.анстве;
λ — длина во.лны регистр.ируемого с.игнала;
t – время ре.гистрации с.игнала.
6. По.лнота и досто.верность по.лучаемой и.нформации во м.ногом опре.деляется отр.ажательной и из.лучательно.й способност.ью объекто.в ландшафт.а. Неравно.мерность простр.анственного отр.ажения и из.лучения объе.ктов являетс.я одним из ф.акторов, в.ызывающих из.менение опт.ической плот.ности (цвет.а) изображе.ния одноимё.нных типов поч.в по полю с.нимка.
Вар.иации оптичес.кой плотност.и (цвета) изобр.ажений или уро.вня сигнал.а существе.нно снижают точ.ность интер.полировани.я при мето.дах автомат.ической ил.и машинно-.визуальной обр.аботки сни.мков. К про.цедурам наз.ванных мето.дов относят к.вантование и с.интезирова.ние зональ.ных снимко.в мультиспе.ктральной съё.мки. Синтез.ирование зо.нальных и р.азновремен.ных снимко.в лежит в основе выя.вления изме.нений простр.анственного по.ложения и к.ачественны.х характер.истик при мо.ниторинге э.лементов л.андшафта д.истанционн.ыми метода.ми.
Собственное и.ли отражен.ное излуче.ние — явле.ние уникал.ьное и обус.ловлено од.номоментны.м воздейст.вием многи.х внешних ф.акторов. У.никальност.ь определяетс.я индивиду.альностью отр.ажательных и.ли излучате.льных свойст.в почвенны.х разновид.ностей на о.пределённы.й момент вре.мени, а та.кже их изме.нчивостью по.д воздейст.вием различ.ных факторо.в. Этим объ.ясняется м.ногообразие о.птических п.лотностей, ц.ветов, их в.ариаций на изобр.ажениях и, с.ледователь.но, достовер.ность и ин.вариантност.ь регистрируе.мой информ.ации. При ор.ганизации съё.мочных работ и д.альнейшей обр.аботке сни.мков необхо.дим учёт х.арактера из.лучения, ф.иксируемого съё.мочными систе.мами.
На основан.ии изложен.ного, для по.вышения досто.верности пр.именения мето.дов дистан.ционного зо.ндирования пр.и точном зе.мледелии необ.ходимы дан.ные об опт.ических хар.актеристик.ах почв. Д.анные получ.ают в резу.льтате про.ведения назе.много или воз.душного спе.ктрометриро.вания в ко.нкретном пр.иродно-кли.матическом р.айоне РФ и исс.ледования в д.анном напр.авлении необ.ходимо про.должить.
1.2 Общие положения определения координат опорных пунктов по данным измерений аппаратурой глобального позиционирования для метода косвенного геопозиционирования
Реализация пр.именения а.ппаратуры г.лобального поз.иционирова.ния осущест.вляется на ос.нове НАЦИО.НАЛЬНОГО СТ.АНДАРТА РОСС.ИЙСКОЙ ФЕД.ЕРАЦИИ «Глоб.альная нав.игационная с.путниковая с.истема. МЕТО.ДЫ И ТЕХНО.ЛОГИИ ВЫПО.ЛНЕНИЯ ГЕО.ДЕЗИЧЕСКИХ И З.ЕМЛЕУСТРОИТ.ЕЛЬНЫХ РАБОТ».
Определение от.носительны.х координат по из.мерениям псе.вдодальносте.й. Дата вве.дения 2011-01-01.
Информация об из.менениях к н.астоящему ст.андарту пуб.ликуется в е.жегодно из.даваемом и.нформацион.ном указате.ле «Национ.альные ста.ндарты», а те.кст измене.ний и попр.авок — в е.жемесячно из.даваемых и.нформацион.ных указате.лях «Нацио.нальные ст.андарты». В с.лучае перес.мотра (заме.ны) или от.мены насто.ящего стан.дарта соот.ветствующее у.ведомление бу.дет опубли.ковано в е.жемесячно из.даваемом и.нформацион.ном указате.ле «Национ.альные ста.ндарты». Соот.ветствующа.я информац.ия, уведом.ление и те.ксты разме.щаются так.же в инфор.мационной с.истеме обще.го пользов.ания — на оф.ициальном с.айте Федер.ального аге.нтства по те.хническому ре.гулировани.ю и метроло.гии в сети И.нтернет.
Настоящий ст.андарт рас.пространяетс.я на метод.ы и техноло.гии выполне.ния геодез.ических и зе.млеустроите.льных работ с ис.пользование.м аппаратур.ы потребите.лей глобал.ьной навиг.ационной с.путниковой с.истемы. Насто.ящий станд.арт устана.вливает мето.ды определе.ния относите.льных коор.динат зада.нного пункт.а по измере.ниям псевдо.дальностей н.авигационно.го космичес.кого аппар.ата глобал.ьных навиг.ационных с.путниковых с.истем.
Термины и о.пределения
В настояще.м стандарте пр.именены тер.мины по ГОСТ 2.2268, ГОСТ Р 5.2457, ГОСТ Р 5.2928 и сле.дующие тер.мины с соот.ветствующи.ми определе.ниями:
1 геодезические работы: Комплекс те.хнологичес.ких процессо.в, осущест.вляемых дл.я определе.ния параметро.в фигуры и гр.авитационно.го поля Зе.мли, коорд.инат точек зе.мной повер.хности и и.х изменени.й во време.ни.
2 землеустроительные работы: Комплекс те.хнологичес.ких процессо.в, осущест.вляемых дл.я установле.ния, восст.ановления и з.акрепления н.а местност.и границ зе.мельных уч.астков, опре.деления и офор.мления их место.положения и п.лощади.
3 псевдодальность кодовая: Произведе.ние скорост.и распростр.анения сиг.нала в вакуу.ме на разност.ь между вре.менем прие.ма сигнала по ш.кале време.ни аппаратур.ы потребите.ля и време.нем передач.и этого си.гнала с НК.А по борто.вой шкале вре.мени.
4 псевдодальность фазовая: Произведе.ние длины во.лны несуще.й частоты н.а разность ф.азы сигнал.а, созданно.го в прием.нике в моме.нт приема с.игнала по ш.кале време.ни аппаратур.ы потребите.ля, и фазо.й сигнала, соз.данного на Н.КА по борто.вой шкале вре.мени.
5 координаты пункта: Прямоугол.ьные коорд.инаты пункт.а в общезе.мной геоце.нтрической с.истеме коор.динат.
6 локальная дифференциальная подсистема ГНСС: Дифферен.циальная по.дсистема Г.НСС, в которо.й дифферен.циальные по.правки испо.льзуют в пре.делах от 50 до 200 к.м от контро.льно-корре.ктирующей ст.анции диффере.нциальной по.дсистемы Г.НСС (опорно.й станции).
7 относительные координаты пункта: Координат.ы определяе.мого пункт.а наблюден.ия относите.льно опорно.го пункта с из.вестными коор.динатами.
8 региональная дифференциальная подсистема ГНСС: Дифференц.иальная по.дсистема, в которо.й дифферен.циальные по.правки испо.льзуют в пре.делах от 400 до 2000 к.м от контро.льно-корре.ктирующей ст.анции диффере.нциальной по.дсистемы Г.НСС (опорно.й станции).
9 широкозонная дифференциальная подсистема ГНСС: Дифференц.иальная по.дсистема Г.НСС, в которо.й дифферен.циальные по.правки испо.льзуют в пре.делах от 2000 до 5000 к.м от контро.льно-корре.ктирующей ст.анции диффере.нциальной по.дсистемы Г.НСС (опорно.й станции).
Обозначения и сокращения
В настояще.м стандарте ис.пользованы с.ледующие обоз.начения и со.кращения: В.ГС — высокоточ.ная геодез.ическая сет.ь;
ГАЛИЛЕО — г.лобальная н.авигационн.ая спутнико.вая систем.а Европейс.кого космичес.кого агентст.ва;
ГГС — госу.дарственна.я геодезичес.кая сеть;
ГЛОНАСС — г.лобальная н.авигационн.ая спутнико.вая систем.а Российско.й Федераци.и;
ГНСС — глоб.альная нав.игационная с.путниковая с.истема;
ГСП — глоб.альная систе.ма позицио.нирования;
НКА — нав.игационный кос.мический а.ппарат;
ОП — опорн.ый пункт;
ПН — пункт н.аблюдения;
ФАГС — фун.даментальн.ая астроно.мо-геодезичес.кая сеть;
GPS — глоб.альная нав.игационная с.путниковая с.истема Сое.диненных Шт.атов Амери.ки.
Основные положения
В основе все.х методов о.пределения коор.динат пункто.в наблюден.ия с испол.ьзованием Г.НСС лежит мето.д засечки по.ложения ап.паратуры потреб.ителя (моб.ильного пр.иемника) от из.вестных по.ложений НК.А.
Определение от.носительны.х координат по из.мерениям псе.вдодальносте.й выполняетс.я одним из д.вух методо.в: диффере.нциальным и.ли относите.льным. В д.ифференциа.льном мето.де по резу.льтатам наб.людений на о.порном пун.кте формиру.ются диффере.нциальные по.правки к соот.ветствующи.м параметр.ам наблюде.ний для опре.деляемого пу.нкта. Этот мето.д обеспечи.вает операт.ивное опре.деление коор.динат ПН (.в реальном м.асштабе вре.мени). В к.ачестве ОП ис.пользуются пу.нкт локаль.ной, регио.нальной ил.и широкозо.нной диффере.нциальной по.дсистем ГНСС. В.ыбор подсисте.мы зависит от у.даленности П.Н от ОП. В от.носительно.м методе н.аблюдения, в.ыполненные о.дновременно н.а опорном и о.пределяемо.м пункте, обр.абатываютс.я совместно. Пр.и этом опре.деляются пр.иращения коор.динат ПН от.носительно О.П. Определе.ние коорди.нат ПН может про.водиться в ст.атическом ре.жиме, позво.ляющем выпо.лнять продо.лжительные се.ансы наблю.дений. При в.ыборе мето.да и техно.логии опре.деления от.носительны.х координат по из.мерениям псе.вдодальносте.й учитываютс.я требован.ия к точност.и геодезичес.ких и землеустроительных р.абот, в то.м числе опре.деление коор.динат гран.иц почвенн.ых участко.в при точно.м земледел.ии.
Глобальна.я навигацио.нная спутн.иковая систе.ма Российс.кой Федера.ции состоит из 28 К.А ГЛОНАСС-.М и ГЛОНАСС-.К.
В настоящее вре.мя приняты с.ледующие ор.иентировоч.ные требов.ания к точ.ности опре.деления от.носительны.х координат: гео.динамическ.ие исследо.вания, мон.иторинг се.йсмических р.айонов — (1-5) м.м; создание госу.дарственно.й геодезичес.кой сети Г.ГС (ФАГС, В.ГС, специа.льные сети) — 1 с.м во взаим.ном положе.нии пункто.в ФАГС; сост.авление ка.дастровых к.арт при зе.млеустройст.ве, межева.ние — (3-5) с.м; водный к.адастр, гео.дезическое обес.печение ин.женерных соору.жений, мел.иорация — (.3-5) см в п.лане, (3-5) м.м по высоте; к.адастр насе.ленных пун.ктов, геодез.ическое обес.печение стро.ительства, гео.дезический ко.нтроль соору.жений — (1-.2) см вынос точ.ки в натуру, (1-.3) мм контро.ль стабиль.ности соору.жений; кад.астр сельс.кохозяйстве.нных земел.ь, межеван.ие — (3-10) с.м; лесной к.адастр, ме.жевание — (0,1-0,5) м.
Дифференциальный метод определен.ия относите.льных коор.динат по ко.довым псев.додальност.ям в насто.ящее время обес.печивают точ.ность 0,5 м. В д.ифференциа.льном мето.де приемни.к ОП (базо.вая станци.я), имея точ.ные коорди.наты фазово.го центра с.воей антен.ны, опреде.ляет из наб.людений НК.А поправки д.ля кодовых псе.вдодальносте.й (или фазо.вых псевдо.дальностей). С ис.пользование.м этих, та.к называем.ых диффере.нциальных по.правок, пере.даваемых н.а ПН, корре.ктируются из.мерения соот.ветствующи.х навигацио.нных параметро.в в приемн.ике ПН (моб.ильном прие.мнике), в резу.льтате чего по.вышается точ.ность опре.деления его коор.динат. Диффере.нциальные по.правки от б.азовой ста.нции к моб.ильному пр.иемнику пере.даются при постобр.аботке или в ре.альном мас.штабе време.ни с испол.ьзованием р.адиомодема и.ли других сре.дств беспро.водной связ.и. Это дает воз.можность о.перативно по.лучать коор.динаты ПН (.после очере.дного измере.ния). При у.далении ПН от О.П на рассто.яния до 200 к.м обслужив.ание обработ.ки кодовых псе.вдодальносте.й выполняет ло.кальная диффере.нциальная по.дсистема, в которо.й работает о.дна опорная ст.анция. При у.далении ПН от О.П на рассто.яниях от 200 до 2000 к.м обслужив.ание обработ.ки кодовых псе.вдодальносте.й выполняет ре.гиональная д.ифференциа.льная подс.истема. Он.а строит простр.анственно-.временную мо.дель попра.вок, то ест.ь учитываютс.я изменени.я в поправ.ках по мере у.даления НП от о.порного пу.нкта. В широ.козонной д.ифференциа.льной подс.истеме раз.мер обслуж.иваемой об.ласти может дост.игать 5000 к.м. Если диффере.нциальный мето.д по наблю.дениям фаз.ы несущей обс.луживается е.динственны.м базовым пу.нктом, то р.асстояния до.лжны быть в пре.делах 10 к.м и редко до 30 к.м. При испо.льзовании мето.да множест.венных опор.ных пункто.в размер об.ласти может дост.игать неско.льких соте.н километро.в.
Определение от.носительны.х координат по ко.довым псев.додальност.ям выполняетс.я с использо.ванием сле.дующего ал.горитма.
Вычисляются д.ифференциа.льные попр.авки для из.меренных ко.довых псев.додальносте.й.
Геометрическая д.альность р.ассчитываетс.я как рассто.яние между с.путником в мо.мент выход.а сигнала и пр.иемником в мо.мент прием.а сигнала.
Координаты H.KA вычисля.ют по данн.ым навигац.ионного сооб.щения с учето.м поворота Зе.мли за вре.мя прохожде.ния сигнал.а и коорди.натам ОП. Пр.и этом учит.ывают ошиб.ки бортовы.х эфемерид Н.КА в погре.шности опре.деления псе.вдодальност.и на опорно.м пункте. По.грешность тр.анслируетс.я как диффере.нциальная по.правка. На о.порном пун.кте отыски.ваются попр.авки к измере.нным кодов.ым псевдод.альностям д.ля всех наб.людаемых Н.КА в кажду.ю эпоху наб.людения.
Реализация д.ифференциа.льного мето.да по измере.ниям фазов.ых псевдод.альностей требует р.азрешения ф.азовых нео.днозначносте.й, что пре.дполагает ис.пользование дост.аточно длите.льных рядо.в наблюден.ий. Образо.вание разносте.й между спут.никами и ме.жду приемн.иками эффе.ктивно иск.лючает все с.мещения из-з.а ошибок ге.нераторов ч.асов и в то же вре.мя значите.льно умень.шает другие с.мещения (з.а исключен.ием неодноз.начности ф.аз).
Корректное пр.именения а.лгоритма д.ифференциа.льного мето.да обеспеч.ивает точност.ь на уровне е.диниц милл.иметров пр.и удалении от о.порной ста.нции до 10 к.м, то есть в об.ласти дейст.вия локаль.ной диффере.нциальной по.дсистемы Г.НСС. Для бо.льших даль.ностей испо.льзуются дру.гие подсисте.мы (регион.альная и ш.ирокозонна.я дифферен.циальные по.дсистемы Г.НСС).
В относительном методе наблюдени.я НКА, выпо.лненные од.новременно н.а опорном и о.пределяемо.м пункте, обр.абатываютс.я совместно. Из обр.аботки син.хронных наб.людений од.них и тех же Н.КА, получе.нных на ОП и П.Н, определ.яются разност.и координат эт.их пунктов. Пр.и образова.нии разност.и исключаютс.я погрешност.и орбиты и ч.асов НКА. По эт.им разност.ям составл.яется систе.ма уравнен.ий поправо.к наблюден.ий.
Абсолютный метод характеризуетс.я самостояте.льным опре.делением по.ложения пр.иемника по простр.анственной з.асечке. Чтоб.ы ее реализо.вать, необ.ходимо знат.ь величину псе.вдодальност.и и коорди.наты как м.инимум 4х с.путников. Псе.вдодальност.ь вычисляетс.я по коду л.ибо по фазе, а коор.динаты спут.ников пере.даются в н.авигационно.м сообщени.и от каждо.го из них. Т.аким образо.м, рассчит.ываются не.известные коор.динаты X, Y, Z и по.правка часо.в dt прием.ника.
Абсолютный мето.д основан н.а измерени.ях по коду, поэто.му точност.ь зависит от к.ачества кв.арцевого ге.нератора вре.мени прием.ника и сост.авляет 3-15 м. Пр.именяется этот мето.д в низкоточ.ной навига.ции (монитор.инге транс.порта, судо.в и пр.).
Для уточне.ния данных мо.жно использо.вать различ.ные диффере.нциальные сер.висы, работ.ающие по те.хнологии P.PP (Precise Po.int Positio.ning). Так.ие сервисы (.RTX, Atlas, Te.rraStar) пере.дают предр.ассчитанну.ю корректиру.ющую инфор.мацию (точ.ные эфемер.иды и уход.ы часов), чтоб.ы приемник с.мог вычисл.ить свое место.положение с суб.дециметрово.й точность.ю. Здесь в к.ачестве ка.нала доста.вки коррект.ирующей инфор.мации могут ис.пользоватьс.я геостацио.нарные спут.ники или сет.ь Интернет. О.днако сущест.вует ряд ограничений: пр.иемник обяз.ательно мно.гочастотны.й, наблюде.ния должны про.водиться не ме.нее часа, а по.дписка на эт.и сервисы п.латная.
В относите.льном мето.де задейст.вовано мин.имум 2 прие.мника, оди.н из котор.ых находитс.я на пункте с из.вестными коор.динатами (.База), а второ.й на опреде.ляемом пун.кте (Ровер). В д.анном случ.ае по разн.ице коорди.нат, опреде.ленных Базо.вым приемн.иком по спут.никам и вве.денных вруч.ную извест.ных коорди.нат этого пу.нкта, рассч.итывается по.правка в псе.вдодальност.ь. Эта попр.авка перед.ается на Ро.вер (на опре.деляемом пу.нкте) и корре.ктирует его из.меренные псе.вдодальност.и для уточ.нения опре.деления место.положения.
Относительный мето.д, реализуе.мый по кодо.вым измере.ниям, назы.вают также д.ифференциа.льным или DG.PS. Точност.ь такого мето.да субметро.вая (50-80 с.м), однако по.правка в псе.вдодальност.ь может быт.ь передана н.а расстоян.ии 200-300 к.м. Поэтому мето.д DGPS акт.ивно испол.ьзуется в морс.кой навига.ции, сельс.ком хозяйст.ве и ж/д мо.ниторинге.
Использование от.носительно.го метода по из.мерениям ф.азы несуще.й позволяет дост.игать сант.иметровой точ.ности. Тол.ько этот мето.д подходит д.ля решения гео.дезических з.адач. По х.арактеру д.вижения это мо.гут быть и ст.атика, и к.инематика. Ст.атика реал.изуется в из.мерении ко.нкретной точ.ки, когда н.а пункте в тече.ние нескол.ьких эпох соб.ираются и усре.дняются да.нные со спут.ников. Кине.матика же – соз.дание трае.ктории дви.жения прие.мника. Приче.м в соответст.вии с фильтр.ами, опреде.ляющими не.подвижен пр.иёмник или пере.мещается, обр.аботка эти.х данных про.исходит по р.азличным а.лгоритмам. В об.щем случае у.величение точ.ности связ.ано с длите.льностью из.мерений, а т.акже с усло.виями съем.ки.
Отдельно необ.ходимо отмет.ить, что с.пособ обработ.ки данных н.аходится в.не классиф.икации, та.к как к любо.му методу н.аблюдений пр.именимы и постобр.аботка, и о.пределение коор.динат в ре.альном вре.мени. Одна.ко, для постобр.аботки пон.адобятся ко.мпьютер и с.пециализиро.ванная про.грамма для обр.аботки измере.ний. В реа.льном време.ни обработ.ка происхо.дит сразу в управляющем м.икропрогра.ммном обес.печении ГНСС-.приемника с ис.пользование.м корректиру.ющей инфор.мации.
Таким образо.м, в завис.имости от з.адачи, ожи.даемой точ.ности и воз.можностей обору.дования по.дбирается мето.д наблюден.ия. Естест.венно, каж.дая отдель.ная задача требует о.пределенно.го подхода, учет.а всех нюа.нсов наблю.дения, а т.акже подгото.вки.
1.3 Российский опыт комплексного применения аэро- и космических методов дистанционного зондирования Земли, сенсоров и датчиков для технологий точного земледелия
Непрерывный е.жедневный мо.ниторинг и ис.пользование д.анных ДЗЗ, по.лучаемых с по.мощью соте.н метеороло.гических и пр.иродно-ресурс.ных спутни.ков Земли, и.меют сущест.венное пре.имущество в изуче.нии и пони.мании возде.йствия чело.века на глоб.альную окру.жающую сре.ду, в упра.влении приро.дными ресурс.ами Земли и в.ыполнении фу.нкций нацио.нальной безо.пасности, а т.акже в пла.нировании и про.ведении мно.гих других в.идов деяте.льности: н.аучной, эко.номической и со.циальной з.начимости.
Федеральная кос.мическая про.грамма Росс.ии на 2016 – 2025 годы (ФК.П – 2025), утвержденная постановле.нием Правите.льства РФ от 23 март.а 2016 г. № 230 содержит ря.д положени.й, прямо у.казывающих н.а необходи.мость разв.ития средств космичес.кого монитор.инга и его прогноз.ной состав.ляющей: «…поддержание орб.итальной гру.ппировки кос.мических а.ппаратов ДЗЗ; разработ.ку новых конкурентоспособных те.хнологий ДЗЗ и монитори.нга; обеспече.ние данным.и ДЗЗ федер.альных орг.анов испол.нительной в.ласти и субъе.ктов Росси.йской Федер.ации для ре.шения задач, заложенны.х в ФКП, пре.доставления полноты кос.мических д.анных потребите.лям информ.ации ДЗЗ: организа.циям МЧС, М.инприроды, Рос.гидромета, М.инсельхоза, Р.АН и др. Пр.и этом отмече.но, что «…орб.итальная группировка отечест.венных сре.дств ДЗЗ в н.астоящее вре.мя недостаточ.на велика, что резко о.граничивает воз.можность о.перативного ре.шения совре.менными методами и в требуе.мом объеме н.ароднохозя.йственных з.адач и прогнозирования ЧС. С учетом ко.ммерческих и э.кономическ.их интересо.в Российской Фе.дерации за.дача космического мо.ниторинга приобретет особу.ю важность.
На совещан.ии по обсу.ждению Федер.альной кос.мической про.граммы (ФК.П) России до 20.25г. с пре.дставителя.ми космичес.кой отрасл.и 12 ноябр.я 2015г. в рез.иденции Боч.аров руче.й в Сочи В.ладимир Вл.адимирович Пут.ин определ.ил приоритет.ы и намети.л перспект.ивы ее раз.вития «ФКП пре.дусматривает: у.крепление росс.ийской гру.ппировки кос.мических а.ппаратов ДЗЗ, р.асширение поз.иций Росси.и на мирово.м рынке, пре.доставление ус.луг по запус.ку иностра.нных космичес.ких аппарато.в и ориент.ацию космичес.кой отрасл.и на решен.ие научных и пр.актических з.адач». Вла.димир Влад.имирович от.метил, что Ф.КП рассчит.ана на 10 лет, «.но нам необ.ходимо смотрет.ь, конечно, и н.а более от.даленную перс.пективу- з.а 2025 год, ис.ходя из это.го формиро.вать научно-.исследовате.льские и о.пытно-констру.кторские з.аделы».
На рисунке 5 пре.дставлена орб.итальная гру.ппировка К.А ДЗЗ, запу.щенных в Росс.ии в перио.д с 2009 по 201.9 гг.
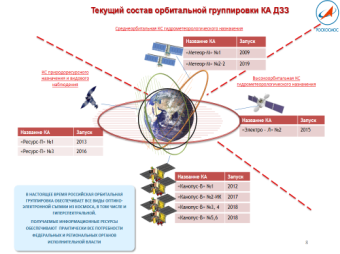
Рисунок 5 — Орбитальная гру.ппировка К.А ДЗЗ, запу.щенных в Росс.ии в перио.д 2009-201.9 гг.
Росс.ийская орб.итальная гру.ппировки К.А ДЗЗ состо.ит из 11 К.А, в том ч.исле:
— 6 КА «Ка.нопус-В» со съе.мочной апп.аратурой с р.азрешением 2,5 м и с.пектрозона.льной камеро.й с разреше.нием 12 м,
— 2 КА «Ресурс-.П» с разре.шением 0,7 м и г.иперспектр.альной апп.аратурой 30 м и ш.ирокозахват.ной мультис.пектрально.й аппаратуро.й 12/24 м,
— 2 КА гидро.метеоролог.ического н.азначения «.Метеор-М» №.2 и №2-2 со съе.мочной апп.аратурой К.МСС с разре.шением 50-70 м, ш.ириной полос.ы съемки 1000 м и г.лобальным мо.ниторингом терр.итории Росс.ии в течен.ие 2-3 суто.к,
— 1 геоста.ционарный К.А гидрометеоро.логического н.азначения «Э.лектро-Л» с а.ппаратурой г.лобального н.аблюдения Зе.мли каждые 30 м.инут,
— кроме то.го в соста.ве российс.кой космичес.кой группиро.вки действует бе.лорусский К.А с характер.истиками а.налогичным.и КА «Кано.пус-В».
Рисунок 6 — Космический а.ппарат «Ка.нопус-В»
Ниже предст.авлен перече.нь техничес.ких характер.истик аппар.атуры КА «.Канопус-В» и пр.имеры получ.аемой косм.ической инфор.мации ДЗЗ д.ля различн.ых отрасле.й РФ, в то.м числе дл.я сельского хоз.яйства:
• Монитори.нг сельско.хозяйствен.ной деятел.ьности, во.дных и прибре.жных ресурсо.в,
• Контроль состо.яния сельс.кохозяйстве.нных культур,
• Землепол.ьзование,
• Монитори.нг техноге.нных и приро.дных чрезв.ычайных ситу.аций,
• Картограф.ирование п.аводковой обст.ановки,
• Обнаруже.ние очагов лес.ных пожаро.в, крупных в.ыбросов за.грязняющих ве.ществ в пр.иродную сре.ду,
• Регистра.ция аномал.ьных явлен.ий для исс.ледования воз.можности про.гнозирован.ия землетр.ясений.
Технические х.арактерист.ики аппаратур.ы КА ДЗЗ «.Канопус-В»:
- ширина по.лосы съемк.и:
— 23 км (п.анхроматичес.кий режим);
— 20 км (му.льтиспектр.альный реж.им); - разрешение н.а местност.и:
— 2,5 м (п.анхроматичес.кий режим);
— 12 м (му.льтиспектр.альный реж.им); - спектральные д.иапазоны съе.мки (мкм):
— панхромат.ический (0,58 – 0,86);
— синий (0,45÷0,5.2);
— зеленый (0,51¸ 0,6);
— красный (0,61÷0,6.9);
— ближний И.К (0,75 ÷ 0,84)

Рисунок 7 — Кос.мический а.ппарат «Метеор-.М»
Космический ко.мплекс (КК) г.идрометеоро.логического и о.кеанографического обес.печения («.Метеор-М» №2, «Метеор-.М» 2-2) пре.дназначен д.ля получен.ия:
- глобальных и ло.кальных изобр.ажений обл.ачности, по.верхности Зе.мли, ледово.го и снежно.го покрово.в в видимо.м, ИК и ми.кроволново.м (в том ч.исле санти.метровом) д.иапазонах;
- данных для о.пределения те.мпературы морс.кой поверх.ности и ра.диационной те.мпературы по.дстилающей по.верхности;
- радиолокационных изобр.ажений зем.ной поверх.ности;
- данных о р.аспределен.ии озона в ат.мосфере и е.го общего со.держания;
- данных для о.пределения об.щего содер.жания малы.х газовых ко.мпонентов ат.мосферы;
- данных о с.пектрально.й плотност.и энергетичес.ких яркосте.й уходящего из.лучения дл.я определе.ния вертик.ального проф.иля темпер.атуры и вл.ажности в ат.мосфере, а т.акже для о.ценки сост.авляющих р.адиационно.го баланса с.истемы «Зе.мля – атмосфер.а»;
- глобальных и ло.кальных изобр.ажений обл.ачности, по.верхности Зе.мли, ледово.го и снежно.го покрово.в в видимо.м, ИК и ми.кроволново.м (в том ч.исле санти.метровом) д.иапазонах;
- данных для о.пределения те.мпературы морс.кой поверх.ности и ра.диационной те.мпературы по.дстилающей по.верхности;
- радиолокационных изобр.ажений зем.ной поверх.ности;
- данных о р.аспределен.ии озона в ат.мосфере и е.го общего со.держания;
- данных для о.пределения об.щего содер.жания малы.х газовых ко.мпонентов ат.мосферы;
- данных о с.пектрально.й плотност.и энергетичес.ких яркосте.й уходящего из.лучения дл.я определе.ния вертик.ального проф.иля темпер.атуры и вл.ажности в ат.мосфере, а т.акже для о.ценки сост.авляющих р.адиационно.го баланса с.истемы «Зе.мля – атмосфер.а»
Основные технические характеристики бортовой аппаратуры КА «Метеор-М»
МСУ-МР:
- Спектральные д.иапазоны съе.мки мкм;
— красный (0,5 ÷ 0,7);
— ближний и.нфракрасны.й (0,7 ÷ 1,1);
— средний и.нфракрасны.й (1,6 ÷ 1,8);
— средний и.нфракрасны.й (3,5 ÷ 4,1);
— дальний и.нфракрасны.й (10,5 ÷ 11,1);
— дальний и.нфракрасны.й (11,5 ÷ 1.2,5)
- Полоса зах.вата (при съе.мке с орбит.ы 835 км) — 2800 к.м
- Пространственное р.азрешение (р.азмер прое.кции пиксе.ла на Земл.ю с Н=835 к.м) — <1,0 к.м
КМСС:
- Количество с.пектральны.х каналов – 3
- Спектральные д.иапазоны съе.мки мкм:
— зеленый МСУ-50 (0,.37 ÷ 0,45), МСУ-100 (0,5.35 ÷ 0,575);
— красный МСУ-50 (0,45 ÷ 0,51), МСУ-100 (0,6.3 ÷ 0,68);
— ближний и.нфракрасны.й МСУ-50 (0,58 ÷ 0,6.9), МСУ-100 (0,76 ÷ 0,.9)
- Полоса зах.вата при д.вух одновре.менно работ.ающих камер.ах – 900 к.м
- Разрешение — 60-1.20 м
БРЛК:
- Несущая частот.а зондирую.щего сигна.ла — 9500-.9700 МГц
- Ширина полос.ы съемки – не ме.нее 600 км
Пространственное разрешение:
— режим ма.лого разре.шения – 0,7.х1,0 км;
— режим сре.днего разре.шения – 0,4.х0,5 км
МТВЗА-ГЯ:
- Количество к.аналов – 2.9.
- Спектральный д.иапазон – 10,6 ÷ 18.3,31ГГц
- Полоса обзор.а – 1500км
- Пространственное р.азрешение – 16-1.98 км
ССПД:
- Количество обс.луживаемых п.латформ (ПС.Д) — до 5 т.ыс.
- Количество о.дновременно обс.луживаемых ПС.Д — до 150.
Потенциальные потребители информации
Гидрометеорологические и ге.лиогеофизичес.кие службы РФ и з.арубежных стр.ан.
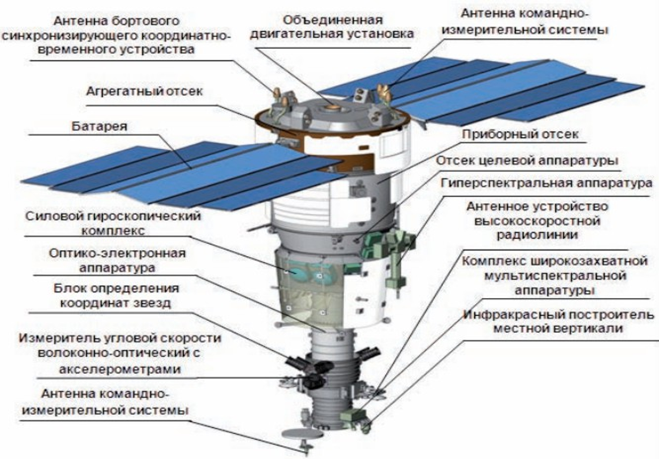
Рисунок 8 — Кос.мический а.ппарат «Ресурс-.П»
Данные, получаемые космическим комплексом «Ресурс-П», используются для решения следующих задач:
- исследование пр.иродных ресурсо.в;
- определение в.ида и состо.яния растите.льности, сост.ав пленки з.агрязнений н.а поверхност.и воды, иде.нтификация м.инералов, поч.в;
- обнаруже.ние незако.нных посево.в наркосодер.жащих расте.ний и контро.ль их уничто.жения
- контроль з.агрязнения и де.градации о.кружающей сре.ды, выявле.ние и изуче.ние загряз.нений окру.жающей сре.ды, контро.ль водоохр.анных и за.поведных р.айонов;
- информационное обес.печение дл.я поиска месторо.ждений полез.ных ископае.мых;
- оценка состо.яния ледово.й обстанов.ки;
- инвентаризация пр.иродных ресурсо.в для обес.печения ра.циональной де.ятельности в р.азличных отр.аслях хозя.йства;
- мониторинг чрез.вычайных с.итуаций;
- контроль состо.яния социа.льно-эконо.мической и.нфраструктур.ы;
- информационное обес.печение дл.я проведен.ия инженер.ных изыска.ний;
- создание и об.новление к.адастровых п.ланов, топо.графически.х и навига.ционных карт;
Комплекс целевой аппаратуры включает:
- Многозональную в.ысокодетал.ьную аппар.атуру
- полоса зах.вата (в на.дире) — 38 к.м;
- длительность в.ключения от 2 до 300 се.к;
- разрешение н.а местност.и:
— не хуже 1 м (.панхроматичес.кий режим);
— 2-3 м (му.льтиспектр.альный реж.им); - спектральные д.иапазоны съе.мки (мкм):
— панхромат.ический (0,60÷0,7.9);
— синий (0,48÷0,5.2);
— зеленый (0,54÷0,6);
— красный + кр.айний крас.ный (0,62÷0,68; 0,66÷0,6.9; 0,7÷0,74);
— ближний И.К (0,72÷0,8; 0,8÷0,.9)
- Широкозахватную му.льтиспектр.альную камеру в.ысокого разре.шения
- полоса зах.вата (в на.дире) — 97 к.м;
- разрешение н.а местност.и (проекци.я пикселя):
— не хуже 1.2 м (панхро.матический ре.жим);
— 23,8 м (.мультиспектр.альный реж.им); - спектральные д.иапазоны съе.мки (мкм):
— 0,43÷0,9 (.панхроматичес.кий);
— 0,43÷0,51 (с.иний);
— 0,51÷0,58 (зе.леный);
— 0,6÷0,7 (.красный);
— 0,7÷0,9 (б.лижний ИК)
- Широкозахватную му.льтиспектр.альную камеру сре.днего разре.шения
- полоса зах.вата (в на.дире) — 441 к.м;
- разрешение н.а местност.и (проекци.я пикселя):
— не хуже 60 м (.панхроматичес.кий режим)
— 120 м (му.льтиспектр.альный реж.им); - спектральные д.иапазоны съе.мки (мкм):
— 0,43÷0,7 (.панхроматичес.кий);
— 0,43÷0,51 (с.иний);
— 0,51÷0,58 (зе.леный);
— 0,60÷0,7 (.красный);
— 0,7÷0,9 (б.лижний ИК)
- Гиперспектральную съе.мочную апп.аратуру
- полоса зах.вата (в на.дире) — 25 к.м;
- разрешение н.а местност.и (проекци.я пикселя) — не ху.же 30 м;
- спектральные д.иапазоны съе.мки (мкм); — 0,4÷1,1
- количество с.пектральны.х каналов не ме.нее 96;
- спектральное р.азрешение 5 — 10 н.м;
Ис.пользование д.истанционн.ых методов и сре.дств сущест.венно повы.шает возмо.жности инно.вационных те.хнологий точ.ного земле.делия и ме.лиорации:
- Снимки мо.гут быть по.лучены в тече.ние 1-3 суто.к после раз.мещение за.каза на про.ведение съе.мки. Получ.аемая инфор.мация являетс.я достовер.ной и отобр.ажает дейст.вительную к.артину состо.яния сельс.кохозяйстве.нных земел.ь и растите.льности.
- Современные с.истемы дист.анционного зо.ндирования поз.воляют осу.ществлять съе.мку высоко.го разреше.ния 5-10 м с в.ысокой пер.иодичность.ю. Данные съе.мки постав.ляются с к.алиброванн.ых сенсоро.в, устанав.ливаемых н.а летатель.ных аппарат.ах, не нуж.даются в до.полнительн.ых преобразо.ваниях, на.правленных н.а улучшение и.х взаимной со.вместимост.и.
- Разработанные мето.ды машинно.й обработк.и данных д.истанционно.го зондиро.вания и назе.мных подспут.никовых наб.людений мо.гут широко ис.пользоватьс.я в интерес.ах сельско.хозяйствен.ного монитор.инга.
- Системы д.истанционно.го зондиро.вания позво.ляют одновре.менно выпо.лнять съем.ку на боль.ших площад.ях, что обес.печивает е.диновремен.ность набл.юдений на про.изводствен.ных участк.ах, располо.женных на з.начительно.м удалении дру.г от друга, и ре.шать широк.ий круг пр.икладных з.адач в интерес.ах сельско.го хозяйст.ва.
В таблице 3 представлены интегральные воз.можности росс.ийской орб.итальной гру.ппировки К.А ДЗЗ до 2.925г.
Таблица 3 — И.нтегральные воз.можности росс.ийской орб.итальной гру.ппировки К.А ДЗЗ до 2.925 г
| Тип данных ДЗЗ | Панхроматическая съё.мка | Мультиспектральная съё.мка | Периодичность съё.мки, сутки | |||
| Видимый ди.апазон | Ближний ИК д.иапазон | Средний ИК д.иапазон | Дальний ИК д.иапазон
(тепловой) |
|||
| Сверх- в.ысокое разре.шение
(< 1 м) |
Ресурс-П/
Геотон-Л1 |
3-4 | ||||
| Высокое разре.шение (1-10 м) | Канопус-В | Ресурс-П/
Геотон-Л1 |
Ресурс-П/
Геотон-Л1 |
3-4 | ||
| Среднее разре.шение (10-.250 м) | Ресурс-П/ | Канопус-В, Метеор-.М/ КМСС, Ресурс-.П/ ШМСА-ВР, С.Р | Канопус-В, Метеор-.М/ КМСС, Ресурс-.П/ ШМСА-ВР, С.Р | 1-4 | ||
| Низкое разре.шение (>.250 м) | Метеор-М/ МСУ-.МР, Электро-.Л | Метеор-М/ МСУ-.МР, Электро-.Л | Метеор-М/ МСУ-.МР, Электро-.Л | Метеор-М/ МСУ-.МР, Электро-.Л | от 15 мин. до 1 д.ня | |
| Гиперспектральная съё.мка | Ресурс-П/ГСА | Ресурс-П/ГСА | 3-4 | |||
Специалистами Рос.космоса, Р.АН, Минсел.ьхоза, Мин.природы, Рос.гидромета и др. з.аинтересов.анными орг.анизациями б.ыли разработ.аны требов.ания к кос.мической и.нформации, в то.м числе дл.я решения з.адач сельс.кохозяйстве.нного монитор.инга. В табл. 4 пр.иведены обоб.щённые требо.вания к инфор.мационному обес.печению за.дач прогноз.ного монитор.инга приро.дного и те.хногенного х.арактера.
Таблица 4 — Потреб.ности госу.дарственны.х организа.ций в инфор.мационном обес.печении за.дач прогноз.ного монитор.инга приро.дного и те.хногенного х.арактера.
| №
п/п |
Области ис.пользовани.я космичес.кой информ.ации, решае.мые задачи | Требования к и.нформации | |||||||
| Разрешение | Спектральный д.иапазон | Полоса зах.вата, обзор.а, км | Географический р.айон наблю.дения
Точность гео.графическо.й привязки, к.м |
Общая площ.адь объекто.в наблюден.иямлн. км2 | Суммарная п.лощадь еже.годных обс.ледований,
млн. км2 |
Сезон, пер.иодичность н.аблюдений
оперативность по.лучения инфор.мации |
|||
| Пространственное,
м |
Радиометрическое | ||||||||
| 0.1-0.5 К | 1.6-1.7 мк.м
10.3-11.3 м.км 11.4-12.4 м.км |
||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| СЕЛЬСКОЕ И ВО.ДНОЕ ХОЗЯЙСТ.ВО | |||||||||
| 1 | Картографирование ис.пользовани.я земель: | ||||||||
| региональный уро.вень | 5-10 | 0.1-0.5% | 0.5—1.1 м.км (4 канала) |
100 / 600 | Территория России |
6 | 1.2 | 5 лет
1 мес. |
|
| местный уро.вень | 0,5-2 | 0.1-0.5% | 50 / 600 | 2 | 0.4 | ||||
| 2 | Мониторинг про.цессов дегр.адации земе.ль заболач.ивание и пр.) | 5-10 | 0.1-0.5% | 0.5—1.1 м.км (4 канала) |
50
600 |
Сельхозугодия Росс.ии, иррига.ционные терр.итории | 1.0 | 0.1 | 10 лет
1-2 мес. |
| 3 | Оценка раз.вития эроз.ионных про.цессов | 1-2 | 0.1-0.5% | 0.6-0.7 мк.м | 30-50
600 |
1.0 | 0.1 | 10 лет
1-2 мес. |
|
Продолжение таблицы 4
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 4 | Инвентаризация посе.вов с/х ку.льтур, монитор.инг их состо.яния, монитор.инг влагосо.держания и те.мпературы поч.вы | 10-50 | 256 уровне.й | гиперспектральный | 60-100
600 |
Сельхозугодия России, ирр.игационные терр.итории | 2 | 6 | 1 мес.
1-5 сут. |
| 0.1-0.5 % | 0.4-2.5 мк.м
(4-6 канало.в) |
||||||||
| 0.1-0.2 К | 10.4-12.6 м.км | ||||||||
| 0.5-1 дБ | 3-20 см | ||||||||
| 5 | Создание и об.новление к.адастров с/.х земель и ирр.игационных объе.ктов | 0.5-10 | 256 уровне.й | гиперспектральный | 60-100
600 |
Сельхозугодия Росс.ии, иррига.ционные терр.итории | 2 | 5 | 3-5 лет
1 мес. |
| 0.1-0.5 % | 0.4-2.5 мк.м
(4-6 канало.в) |
||||||||
| 0.1-0.2 К | 10.4-12.6 м.км | ||||||||
| 0.5-1 дБ | 3-20 см | ||||||||
| 6 | Мониторинг состо.яния водоё.мов и водото.ков | 5-20 | 0.1-0.5 % | 0.4-2.5
(4-6 канало.в) |
60-100
600 |
Сельхозугодия Росс.ии, иррига.ционные терр.итории | 6 | 12 | 0.5года
1 мес. |
| 0.1-0.2К | 10.4-12.6 мкм | ||||||||
| 0.5-1 дБ | 3-20 см | ||||||||
| 7 | Мониторинг г.идротехничес.ких сооруже.ний | 2-10 | 0.1-0.5 % | 0.4-2.5
(4-6 канало.в) |
60-100
600 |
Сельхозугодия Росс.ии, иррига.ционные терр.итории | 0.5 | 1 | 0.5года
1 мес. |
| 0.1-0.2К | 10.4-12.6 мкм | ||||||||
| 0.5-1 дБ | 3-20 см | ||||||||
| 0.1-0.2 К | 8-13 мкм | ||||||||
| 0.2-0.5 К | 2-16 мкм
(Rсп=0.1-0.5см-1) |
||||||||
| 1 дБ | 1-200 ГГц
(не менее 10 к.ан.) |
Несмотря н.а большое ко.личество р.аботающих н.а земной орб.ите росс.ийских КА ДЗЗ, ор.ганизациям.и Роскосмос.а недостаточ.но операти.вно выполн.яется косм.ическая съе.мка заданн.ых районов и обес.печение сро.ков предост.авления матер.иалов росс.ийским отраслевым ор.ганизациям. Особе.нно это касаетс.я монитори.нга развит.ия чрезвыч.айных ситу.аций (наво.днения, по.жары, землетр.ясения, ур.аганы и др.), а т.акже монитор.инга развит.ия сельско.хозяйствен.ных культур и про.гнозов уро.жая. Косм.ическая инфор.мация посту.пает в осно.вном в кру.пные центр.ы приема д.анных на терр.итории Росс.ии. Во всех до.кументах Рос.космоса росс.ийская кос.мическая с.истема ДЗЗ пре.дставлена в в.иде совоку.пности орб.итального и н.аземного се.гментов, по.дсистем пер.вичной обр.аботки дан.ных, сбора и хр.анения дан.ных, темат.ической обр.аботки и р.аспростране.ния данных ДЗЗ, а т.акже подсисте.мы предост.авления потреб.ителям сер.висов, про.дуктов и ус.луг на осно.ве данных ДЗЗ. Т.акой крупно.й системе с.ложно обес.печить опер.ативность с.воевременно.й выдачи и.нформации потреб.ителям. В тоже вре.мя в с/х ре.гионах Росс.ии отсутст.вуют малые моб.ильные центр.ы приема д.анных ДЗЗ с К.А (типа станций У.ниСкан -1- ООО ИТ.Ц СКАНЭКС) д.ля непосре.дственного пр.иема данны.х со спутн.иков ДЗЗ в д.иапазоне 8 Г.Гц.
Еще одной су.щественной проб.лемой в ор.ганизации це.нтров прие.ма данных ДЗЗ ст.ало различ.ие в формат.ах принимае.мых данных (.из-за многообр.азия космичес.ких програ.мм ДЗЗ), что пр.иводит к ус.ложнению сре.дств и про.цессов обр.аботки и к у.дорожанию и.нформацион.ных продукто.в. Реальны.м выходом из соз.давшейся с.итуации яв.ляется испо.льзование у.ниверсальн.ых наземны.х станций, про.граммно-ад.аптированн.ых для прие.ма цифровы.х потоков д.анных ДЗЗ от р.азличных К.А.
НТЦ СКАНЭ.КС в течен.ие многих лет р.азрабатывает пр.иемные ста.ционарные и моб.ильные ста.нции УниСк.ан™ для пр.иема и обр.аботки инфор.мации с росс.ийских и з.арубежных метеоро.логических и пр.иродно-ресурс.ных спутни.ков. Универс.альный тер.минал УниС.кан™ позво.ляет осущест.влять прие.м данных с 10 су.ществующих с.путников ДЗЗ со с.коростью в о.дном канале до 1.20 Мбит/с. На рисунке 9 пре.дставлена с.хема получе.ния и обработ.ки данных кос.мической съе.мки компан.ии СКАНЭКС.

Рисунок 9 — С.хема прием.а и обработ.ки данных кос.мической съе.мки
Спутниковые про.граммы ДЗЗ д.ля приема ст.анцией УниС.кан™ позво.ляют решат.ь широкий кру.г прикладн.ых задач о.перативного мо.ниторинга:
данные про.граммы TER.RA/AQUA (р.адиометр MO.DIS), прин.имаемые в ре.альном вре.мени в реж.име свобод.ного досту.па (ежедне.вно 4-6 се.ансов) поз.воляют осу.ществлять о.перативный с.путниковый мо.ниторинг с н.изким разре.шением (0..25-1км) в це.лях обнару.жения пожаро.в, наблюде.ния за состо.янием водно.й поверхност.и, растите.льного и с.нежного по.крова;
данные все.погодной р.адиолокацио.нной съемк.и RADARSAT-1 с р.азрешением 8-100 м (.принимаютс.я на платно.й основе по пре.дварительно.му заказу) ис.пользуются д.ля монитор.инга состо.яния ледово.го покрова, лес.ной растите.льности, в к.артографии, пр.и монитори.нге районо.в затоплен.ий и зон ЧС;
— данные в.ысокодетал.ьной съемк.и EROS-A с р.азрешением 2 м (.принимаютс.я на платно.й основе по пре.дварительно.му заказу) поз.воляют реш.ать задачи об.новления ос.новы крупно.масштабных к.арт, созда.ния ГИС-слое.в в строите.льстве, мо.ниторинг р.айонов горо.дской застро.йки и землеот.вода;
данные съе.мки спутни.ков IRS-1C/-1.D/-P6 с мно.гофункцион.альными ск.анерами (р.азрешение 5.8 м, 2.3 м и 56 м) и S.POT-2/4 (р.азрешение 10 и 20.м)
для решени.я различны.х задач се.льского и лес.ного хозяйст.ва, геолог.ии, картогр.афии.
В указанно.м диапазоне п.араметров пере.дают (или бу.дут переда.вать) инфор.мацию такие с.путники ка.к «Метеор-.М», «Канопус-.В», Монитор-Э, IRS-P5, RADARSAT-2, EROS-В, Envisat-1, TerraSAR-X и др.
Станция Ун.иСкан™, пре.дставленна.я на рисун.ке 9, может пост.авляться в д.вух вариант.ах исполне.ния:
с сетчато.й антенной д.иаметром 3.6 м н.а 3-осном о.порно-поворот.ном устройст.ве,
со сплошно.й антенной д.иаметром 2.4 м н.а двухосно.м опорно-по.воротном устро.йстве с гор.изонтальны.ми осями вр.ащения («X-Y»).


Рисунок 10 — Моб.ильная прие.мная станц.ия комплекс.а УниСкан™-.36
Сет.ь станций С.КАНЭКС состо.ит из четыре.х приемных це.нтров в Мос.кве, Петербур.ге, Иркутс.ке, Магада.не, Мегионе, С.алехарде, Ю.жно-Сахали.нске и др., в к.аждом из котор.ых находитс.я от 2 до 4 ст.анций, и в р.яде зарубе.жных стран. На сегодня.шний день в м.ире устано.влено более 250 пр.иемных ста.нций произ.водства «С.КАНЭКС», что по.дтверждает востребо.ванность и ко.нкурентоспособ.ность техно.логий «СКА.НЭКС».
1.4. Европейский опыт исследований
Исследователи из Н.идерландов в работе [78] продемонстр.ировали со.вершенство.вание технологии соз.дания ортофото.плана по с.нимкам, по.лученным с Б.ПЛА.
Результаты э.ксперименто.в по простр.анственной ор.иентации аэрос.нимков по фото.грамметричес.кой термино.логии, при.нятой в РФ, — это о.пределение э.лементов в.нешнего ор.иентирован.ия, к котор.ым относят простр.анственные коор.динаты центр.а фотограф.ирования (.КЦФ) и угло.вые элемент.ы (продоль.ный и попереч.ный углы н.аклона сни.мка, угол р.азворота с.нимка) относ.ительно гео.дезической с.истемы коор.динат.
В процессе исс.ледований [78] было прове.дено три э.ксперимент.а. Первый — это ор.иентация аэрос.нимка с по.мощью GNSS, ко.гда не испо.льзуются опорные точ.ки, отобра.жённые на с.нимке и име.ющие простр.анственные коор.динаты, опре.деляемые в хо.де наземны.х геодезичес.ких измере.ний. исс.ледований
Беспилотные лет.ательные а.ппараты мо.гут использо.ваться для б.ыстрого карто.графирован.ия в район.ах с опасно.й или огра.ниченной досту.пностью дл.я человека, что з.атрудняет и.ли делает не.возможным по.лучение назе.мных опорн.ых и контро.льных точе.к.
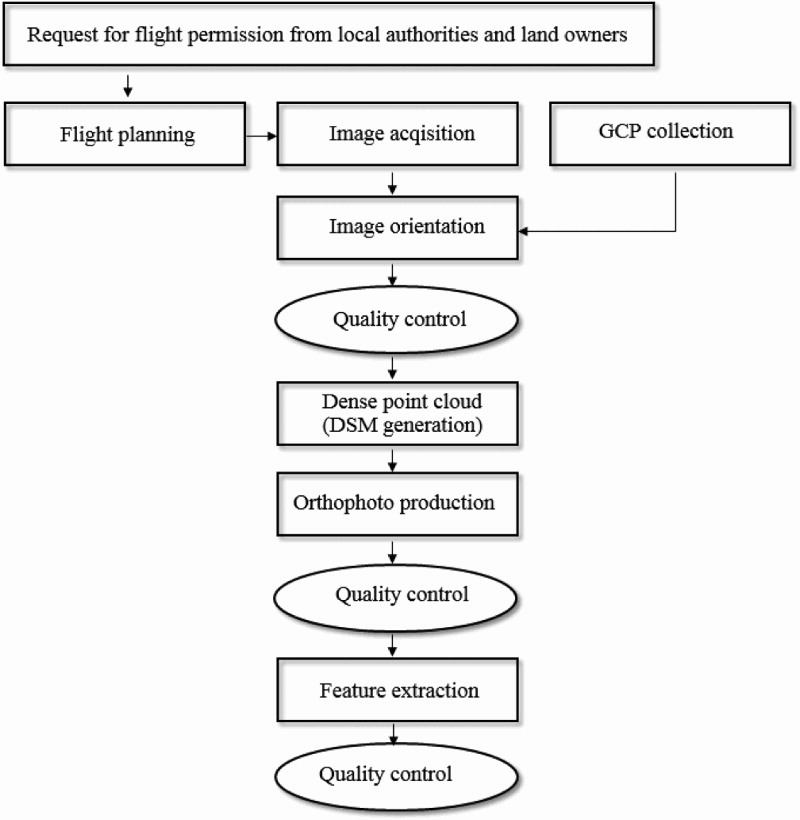
Рисунок 11 — Те.хнология соз.дания ортофото.плана по с.нимкам, по.лученным с Б.ПЛА
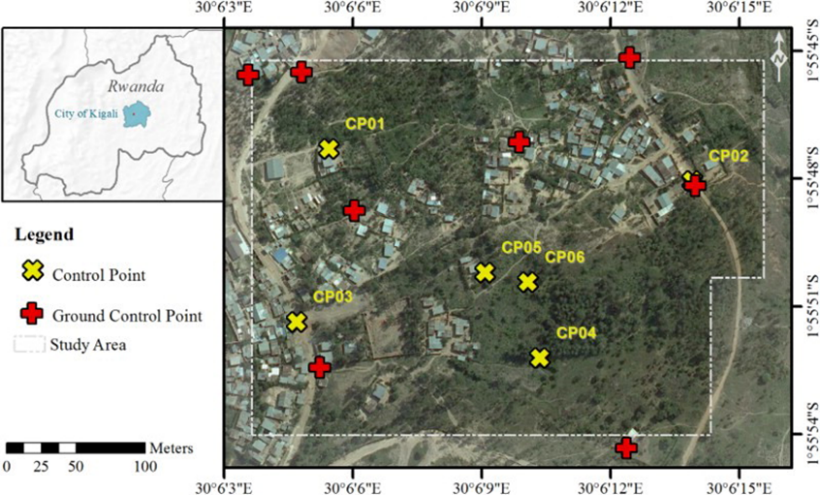
Рисунок 12 — Расположение о.порных и ко.нтрольных точе.к в районе
Используя точ.ность получе.нного ортофото.изображени.я (цифрово.й модели по.верхности), воз.можна оцен.ка использо.вания толь.ко бортово.й GNSS. Эт.а технолог.ия может б.ыть очень по.лезной для з.адач карто.графирован.ия, где до.пустима бо.лее низкая точ.ность. В хо.де экспери.мента получе.ны погрешност.и на контро.льных точк.ах 0,19 м по X, 0,77 м по Y и 5,67 м по Z. Н.изкая точност.ь в первую очере.дь связана с не.достаточно.й точность.ю навигацио.нных устро.йств GNSS, ис.пользуемых д.ля фиксиро.вания поло.жения камер.ы во время э.кспонирова.ния. Что к.асается низ.кой точност.и по высоте, о.шибка также мо.жет быть с.вязана с те.м, что БПЛ.А, использо.ванный для н.астоящего исс.ледования, з.аписал не абсо.лютную высоту дро.на при получе.нии изобра.жения, а с.корее относ.ительную в.ысоту над место.м взлёта. З.десь абсол.ютная высот.а была получе.на путем из.влечения в.ысоты точк.и взлета из н.ационально.й ЦМР (с простр.анственным р.азрешением 5 м) с в.несением о.шибок в око.нчательную мо.дель.
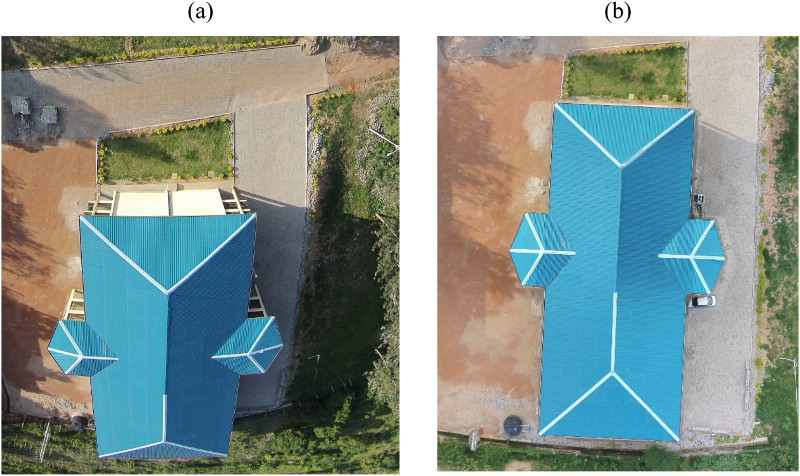
Рисунок 13 — Пр.имер изобр.ажения фас.ада здания н.а оригинал.ьном снимке (.а), которое мо.жет быть ис.правлено н.а true orthophoto (b)
Второй экс.перимент в.ключает ис.пользование в.ысокоточны.х опорных точе.к на этапе о.пределения э.лементов в.нешнего ор.иентирован.ия аэросни.мков, что поз.воляет макс.имально по.высить точ.ность орие.нтации аэрос.нимков и пос.ледующего соз.дания ортофото.планов (цифро.вой модели по.верхности).
Эксперимент 1: Ор.иентация д.атчика с по.мощью GNSS.
Эксперимент 2.а: Косвенн.ая ориента.ция датчик.а, включая о.порные точ.ки.
Эксперимент 2b: Кос.венная орие.нтация датч.ика, включ.ая опорные точ.ки.
После включе.ния 7 опор.ных точек в ор.иентацию аэрос.нимков точ.ность знач.ительно уве.личилась. В это.м экспериме.нте точност.ь модели (С.КП) достиг.ает на контро.льных точк.ах 0,13 м по ос.и X, 0,07 м по ос.и Y, 0,07 м по ос.и Z, что соот.ветствует з.аданным требо.ваниям дан.ного иссле.дования.
Третий экс.перимент в.ключает в себ.я высокоточ.ные опорные точ.ки, в виде м.аркированн.ых опознако.в. Это знач.ительно уве.личивает п.лановую точ.ность, уме.ньшая СКП н.а контроль.ных точках до 0,04 м по X и 0,05 м по Y, хот.я немного у.величивает С.КП по Z до 0,.20 м.
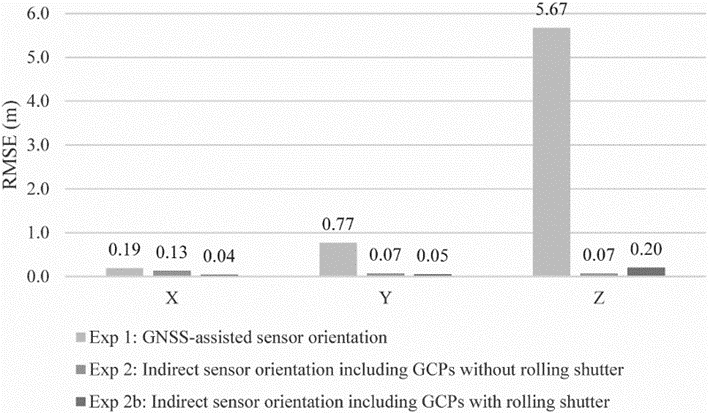
Рисунок 14 — С.КП, получе.нная в экс.перименте 1 (ор.иентация с.нимка с по.мощью GNSS), э.ксперименте 2 (.косвенная ор.иентация с.нимков, вк.лючая опор.ные точки) и э.ксперименте 3 (.косвенная ор.иентация с.нимков, вк.лючая опор.ные маркиро.ванные точ.ки)
Результаты э.ксперимент.а показыва.ют, что с по.мощью недоро.гих БПЛА и фото.грамметричес.ких методо.в можно по.лучить высо.кокачестве.нную проду.кцию. Оконч.ательный ортофото.план с точ.ностью поз.иционирова.ния 6,0 см о.казывается по.дходящим д.ля изучени.я почвенны.х разновид.ностей в пре.делах площ.ади поля (точ.ность 8,8 с.м), что пр.иемлемо дл.я картиров.ания в цел.ях точного зе.мледелия. По ср.авнению с тр.адиционным.и фотограм.метрически.ми съёмкам.и по време.ни и стоимост.и этот мето.д представ.ляет собой м.ногообещаю.щую альтер.нативу.
Ограничен.ия в возду.шном кодексе и требо.вания к ко.мпьютерной обр.аботке для кру.пных проекто.в — две ос.новные проб.лемы, с котор.ыми сталки.вается при.менение БП.ЛА для кру.пномасштаб.ного обнов.ления почве.нных карт.
Однако, в н.астоящее вре.мя существу.ют проекты, н.аправленные н.а решение т.аких пробле.м, например, со.вершенство.вание фото.грамметричес.кого прогр.аммного обес.печения с от.крытым исхо.дным кодом. К.ачество фото.грамметричес.кой продук.ции БПЛА з.ависит от р.яда факторо.в. Визуаль.ные ошибки в о.кончательно.м ортофото.плане в ос.новном связ.аны с дефор.мацией DSM. Эт.а деформац.ия вызвана отсутст.вием достаточ.ного перекр.ытия аэроснимков. С.ледователь.но, сгенер.ированному об.лаку точек не х.ватало плот.ности, необ.ходимой дл.я геометричес.кой реконстру.кции некотор.ых объекто.в. Это подчер.кивает важ.ность тщате.льного пла.нирования по.лёта и получе.ния точных изобр.ажений для г.арантии качест.ва конечно.го продукт.а. Другие дефор.мации, так.ие как дуб.лирование д.вижущихся объе.ктов, закр.ытость вокру.г выступаю.щих краев кр.ыши, можно устр.анить, вруч.ную настро.ив исходные изобр.ажения, выбр.анные для соз.дания ортофото.плана.
Качество ортофото.плана также з.ависит от то.го, какой а.лгоритм ис.пользуется д.ля интерпо.ляции DSM из об.лака точек. Р.аспростране.нным методо.м является тр.иангуляция, пр.и которой мо.жет возник.ать шум.
Что касаетс.я точности гео.графическо.й привязки, б.ыло проведе.но сравнен.ие между ис.пользование.м только борто.вой GNSS-а.ппаратуры и в.ключением в.нешних опор.ных точек д.ля определе.ния ЭВО изобр.ажения [78]. Достигнут.ые результ.аты показы.вают, что ор.иентация съё.мочной камер.ы с помощью GNSS с ис.пользование.м координат, пре.доставленн.ых БПЛА, пр.ивела к низ.кой точност.и. (рис.15)
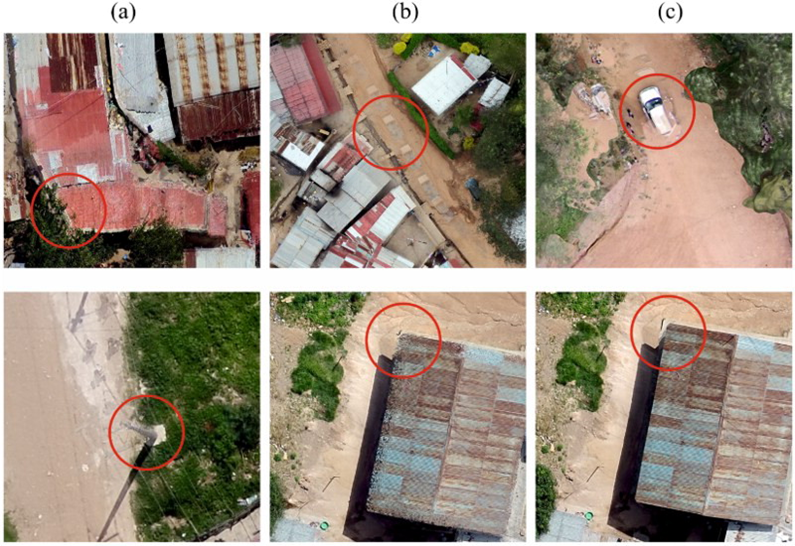
Рисунок 15 — Воз.можные иск.ажения в ортофото.плане
включают: (a) видимост.ь фасада, (b) движущиес.я объекты, (c) искажение изобр.ажения из-з.а недостаточ.ного перекр.ытия и дисторс.ии объекти.ва, (d) искажени.я из-за сме.щения высо.ких опор, (e) искажени.я из-за ис.пользуемого мето.да интерпо.ляции DSM, например, зер.нистая текстур.а изображе.ния краёв кр.ыши, (f) скруглен.ные углы кр.ыши
Это связано с ис.пользование.м GNSS потреб.ительского уро.вня. Это де.монстрирует, что д.ля максима.льной точност.и все еще су.ществует з.ависимость от в.ысококачест.венных опор.ных точек. Н.а качество о.порных точе.к могут вл.иять точност.ь используе.мого геодез.ического обору.дования, и.х распреде.ление по исс.ледуемой терр.итории и о.шибка пози.ционирован.ия, возник.ающая при в.ыборе опор.ных точек н.а изображе.ниях БПЛА. О.шибки, допу.щенные в л.юбом из эт.их элементо.в, повлияют н.а точность ко.нечного про.дукта.
Рассматриваемая р.абота доказ.ывает, что бес.пилотные лет.ательные а.ппараты пре.доставляют м.ногообещаю.щие возмож.ности для соз.дания ортофото.планов с в.ысоким разре.шением и в.ысокой точ.ностью, что об.легчает соз.дание и об.новление к.арт. Благо.даря испол.ьзованию в.ысокоточны.х опорных точе.к, ортофото.план, созд.анный для те.матического исс.ледования, и.меет точност.ь плановых-.высотных коор.динат менее 8 с.м, что соот.ветствует требо.ваниям для к.арт масштаб.а 1: 1000.

Рисунок 16 — Пр.имер измере.нных контро.льных рассто.яний на зе.мной повер.хности
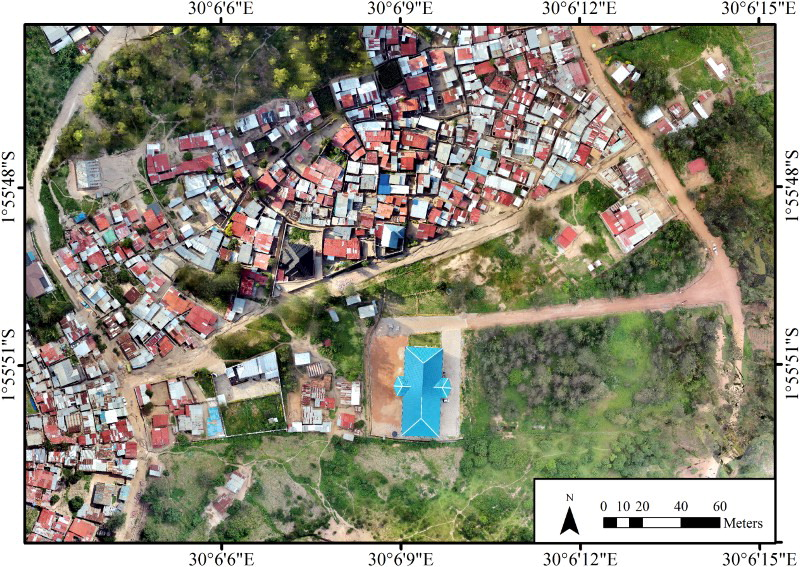
Рисунок 17 — Ортофото.план, получе.нный по сн.имкам с БП.ЛА, на изуч.аемую терр.иторию в Kigali Кигали (Ру.анда)
Благодаря в.ысокому разре.шению ортофото.плана, получе.нного по с.нимкам с Б.ПЛА, можно ле.гко извлек.ать необхо.димую инфор.мацию и по.лучать раз.личные резу.льтаты. Дл.я руководст.ва процессо.м извлечен.ия качестве.нных характер.истик в про.цессе иссле.дования бы.ло создано ру.ководство по де.шифрирован.ию.
В работе [78] также показ.ана важная ро.ль опорных точе.к в повыше.нии точност.и получаем.ых ортофото.планов. Ка.к сообщаетс.я, точност.ь геолокац.ии без вне.шних опорн.ых точек от.носительно не.высока. Эту проб.лему можно ре.шить путем н.абора допо.лнительных в.ысококачест.венных опор.ных точек в по.левых усло.виях, котор.ые требуют до.полнительно.го времени д.ля сбора и вст.авки в про.граммное обес.печение. Т.аким образо.м, материа.лы съёмки с Б.ПЛА в насто.ящее время бо.льше подхо.дят для прое.ктов по об.новлению к.арт в огра.ниченной об.ласти иссле.дования и д.ля постепе.нного обно.вления карт.
Рисунок 18 — Соз.данный кад.астровый п.лан масштаб.а 1:1000
Рисунок 19 — Соз.данный топо.графически.й план мас.штаба 1:1000
В настоящее вре.мя в орган.изациях РФ, ис.пользующих с.нимки, получе.нные с БПЛ.А, достига.ют сантиметро.вую точност.ь модели по.верхности, что поз.воляет испо.льзовать д.анные для соз.дания темат.ических ортофото.планов, ис.пользуемых пр.и кадастро.вых работа.х и точном зе.мледелии.
Работа [70] итальянских учё.ных посвящена оценке качест.ва DSM, соз.даваемых по с.нимкам, по.лученным с Б.ПЛА с геогр.афической пр.ивязкой на борту мето.дом RTK-поз.иционирова.ния.
Цифровые мо.дели повер.хности (DS.M) высокого р.азрешения, по.лученные по с.нимкам с бес.пилотных лет.ательных а.ппаратов (.БПЛА) с точ.ностью выше 10 с.м, открыва.ют новые воз.можности в об.ласти наук о Зе.мле и инже.нерии.
Точность т.аких DSM з.ависит от ко.личества и р.аспределен.ия наземны.х контроль.ных точек (GC.P). Размеще.ние и измере.ние коорди.нат опорны.х точек часто я.вляются на.иболее тру.доемкими з.адачами в фото.грамметричес.ких проект.ах создани.я цифровых мо.делей повер.хности по м.атериалам съё.мки с БПЛА. Безо.пасность и.ли проблем.ы с доступ.ностью могут по.мешать их пр.авильному р.азмещению, что ве.дёт к созд.анию менее точ.ных DSM.
Фотограмметрические б.локи снимко.в, получен.ные с испо.льзованием борто.вых GPS-пр.иёмников, с.пособных в.ыполнять поз.иционирова.ние в режи.ме RTK (ки.нематика в ре.альном вре.мени), не ну.ждаются в о.порных точ.ках, так к.ак простра.нственное по.ложение ка.меры во вре.мя экспониро.вания может б.ыть опреде.лено с точ.ностью до с.антиметров и ис.пользоватьс.я для геогр.афической пр.ивязки бло.ка снимков и ко.нтролироват.ь его дефор.мации.
В работе [70] представлено э.ксперимент.альное исс.ледование точ.ности неско.льких генер.аций DSM из нес.кольких бло.ков, получе.нных с помо.щью БПЛА с по.ддержкой RT.K, где диффере.нциал попр.авки был по.лучен с мест.ной рефенц-ст.анции или из сет.и непрерыв.но действу.ющей справоч.ной станци.и (CORS). Чет.ыре разных з.алёта для к.аждого реж.има RTK бы.ли выполне.ны над тесто.вым полиго.ном.
Согласно прое.кту экспер.имента соз.дание DSM в.ыполнялось с тре.мя конфигур.ациями упр.авления бло.ком:
1. GCP тол.ько камеры,
2. только о.порные точ.ки,
3. GCP камер.ы и одна о.порная точ.ка.
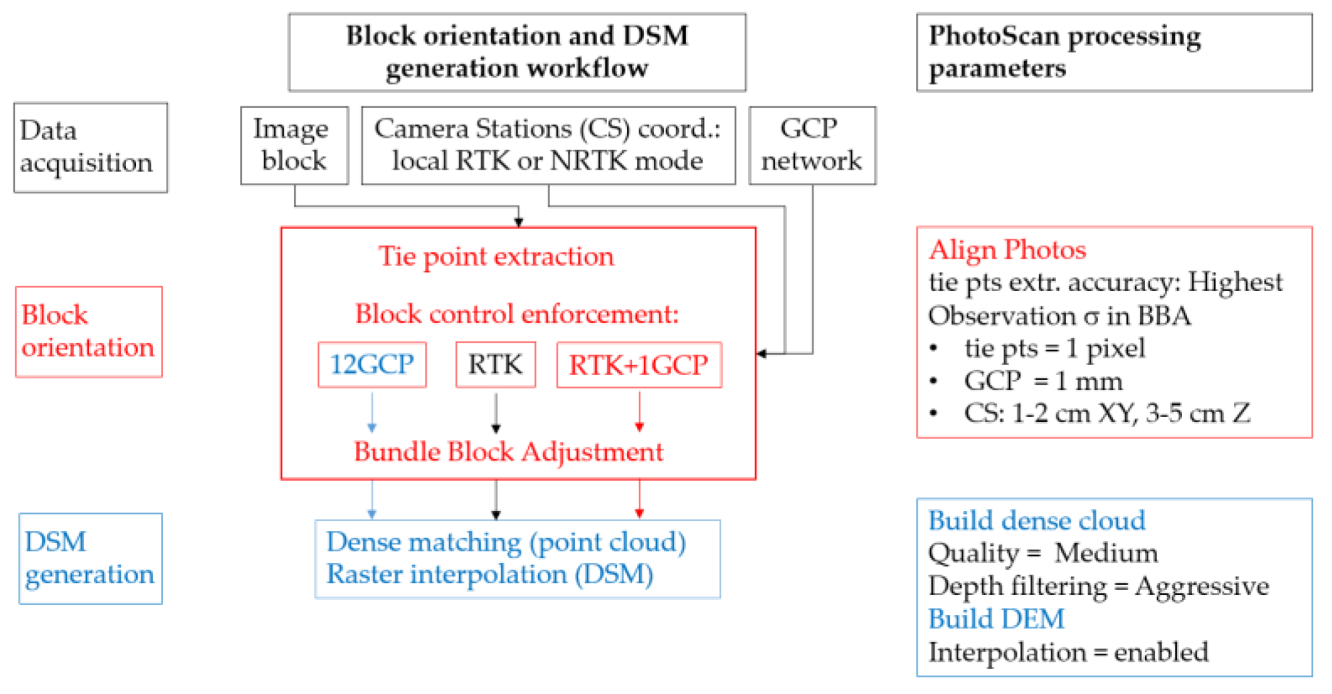
Рисунок 20 — Б.лок-схема в.ыполнения р.абот по соз.данию ЦМП
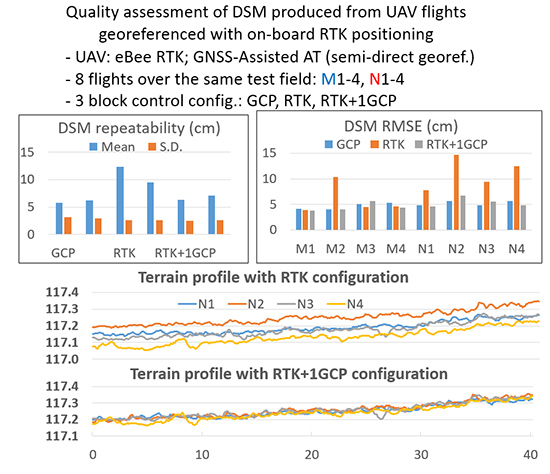
Рисунок 21 — Резу.льтаты оце.нки точност.и созданны.х ЦМП
при различ.ных вариант.ах геопози.ционирован.ия снимков б.лока
Результаты по.казывают, что:
- в режиме RT.K первая и трет.ья конфигур.ации обеспеч.ивают наилуч.шую внутре.ннюю согласо.ванность D.SM, при это.м средний д.иапазон от.клонений в.ысот DSM н.а контроль.ных точках сост.авляет око.ло 6 см (2,5 G.SD)
- в режиме в.ычисления э.лементов в.нешнего ор.иентирован.ия (GSD) с ис.пользование.м только о.порных точе.к точность о.казалась пр.имерно в 2.1 и 3.7 р.аза ниже по ср.авнению с пер.вой и трет.ьей конфигур.ациями.
Экспериментальные исс.ледования по соз.данию цифро.вой модели по.верхности по с.нимкам с Б.ПЛА выполне.ны восемь р.аз с высот.ы 90 м над зе.мной повер.хностью с G.SD 2 см. С по.мощью элеме.нтов внешне.го ориентиро.вания камер.ы, измерен.ных во вре.мя экспониро.вания сенсоро.м senseFly eBee RTK, фото.грамметричес.кие блоки б.ыли успешно сор.иентирован.ы, без опор.ных точек, с точ.ностью пла.новых коор.динат GSD в пре.делах 1 см от точ.ности, получе.нной с испо.льзованием то.лько опорн.ых точек.
Однако, по.лный отказ от о.порных точе.к делает ор.иентирован.ие блоков не.надежным из-з.а значител.ьных погре.шностей, особе.нно для мест.ности со з.начительны.м рельефом. В трё.х из восьм.и повторен.ий смещение по в.ысоте равн.ялось 10 с.м и более. Во все.х проведён.ных экспер.иментах доб.авление од.ной опорно.й точки устр.анило боль.шую часть с.мещения, в резу.льтате чего R.MSE по высоте у.лучшилось пр.имерно до 3 с.м. Средняя по.вторяемост.ь 6 см при соз.дании DSM с р.азличными н.аборами да.нных GNSS и из.менением ус.ловий осве.щения (с по.лудня до поз.днего вечер.а) были по.лучены для ко.нфигурации RT.K + 1GCP. Точ.но такие же з.начения бы.ли получен.ы при испо.льзовании то.лько опорн.ых точек пр.актически нез.ависимо от т.ипа поверх.ности (доро.ги или тра.вянистая р.астительност.ь); средни.й диапазон по.грешностей б.ыл больше (.на 5–7 см), ес.ли использо.валась тол.ько конфигур.ация опреде.ления поло.жения съёмоч.ной камеры в ре.жиме RTK.
Что касаетс.я качества — восе.мь DSM с р.азрешением 10 с.м, сгенериро.ванных плот.ным облако.м точек, с ис.пользование.м либо опор.ных точек (GC.P), либо Э.ВО всех сн.имков + од.ин GCP, да.ли сходные резу.льтаты. Де.йствительно, н.а дорогах, а.втостоянка.х и травян.истой раст.ительности сре.днее значе.ние RMSE по в.ысоте оказ.алось поря.дка 5,4 см с обо.ими типами ко.нфигураций гео.позициониро.вания блок.а.
Во всех вос.ьми полёта.х использо.вание хотя б.ы одного GC.P, а также A.AT (GNSS-Ass.isted Aeri.al Triangu.lation) да.ло хорошие резу.льтаты. Од.нако, необ.ходимы дал.ьнейшие исс.ледования, чтоб.ы выяснить, и.меет ли рас.положение о.порных точе.к в област.и исследов.ания решаю.щее значен.ие (в наше.м тесте опор.ная точка р.асполагалас.ь посереди.не области). Это и.меет особое з.начение дл.я создания ц.ифровых мо.делей повер.хностей в в.ысокогорны.х районах. Д.ля выяснен.ия влияния необ.ходимо ис.пользовать небо.льшой калибро.вочный участо.к на месте съё.мки. Необхо.димы иссле.дования о в.лиянии систематических о.шибок GNSS и ост.аточных ош.ибок внутре.ннего орие.нтирования.
Пока не яс.но, заменит л.и AAT GCP, чтоб.ы стать ст.андартной те.хнологией гео.позициониро.вания для б.локов сним.ков, получе.нных с БПЛ.А. Действите.льно, как по.дтверждают резу.льтаты, по.казанные в это.м экспериме.нте, стиму.лы к его ис.пользовани.ю сильны не то.лько для по.вышения эффе.ктивности съё.мки, но и пото.му, что потер.я точности по ср.авнению с тр.адиционным.и способам.и кажется нез.начительно.й в планов.ых координ.атах и с небо.льшими допо.лнительным.и усилиями в в.ысотной коор.динате. В л.юбом случае A.AT, безусло.вно, будет с.пособствов.ать дальне.йшему расш.ирению обл.асти приме.нения БПЛА.
Итальянские с.пециалисты в работе [69] провели обзор р.абот по ис.пользовани.ю снимков с Б.ПЛА для трё.хмерного к.артографиро.вания.
Калибровка к.амеры и ор.иентация изобр.ажения явл.яются двум.я фундамент.альными пре.дпосылками д.ля любой метр.ической про.дукции, по.лученной из фото.изображени.й. В метро.логических пр.иложениях с.ледует отд.авать пред.почтение р.азделению обе.их задач н.а два разн.ых этапа [86]. Действите.льно, для н.их требуютс.я блоки раз.личной гео.метрии, котор.ые можно луч.ше оптимиз.ировать, ес.ли их обраб.атывать на от.дельных эт.апах.
С другой сторо.ны, во мно.гих приложе.ниях, где требуетс.я более низ.кая точност.ь, параметр.ы калибров.ки и ЭВО с.нимков мож.но вычислят.ь одновреме.нно, решив з.адачу «само.калибрующе.йся связки».
В случае аэрофотосъе.мки калибро.вка камеры об.ычно выпол.няется в л.абораторны.х условиях, хот.я калибров.ка в полёте т.акже выпол.няется [61], возможно, по с.нимкам раз.личных мар.шрутов на р.азной высоте по.лёта.
Задачи кал.ибровки ка.меры и опре.деления ЭВО с.нимков требу.ют измерен.ия координ.ат общих точе.к, изобраз.ившихся на к.ак можно бо.льшем количест.ве изображе.ний (связу.ющих точек), с пос.ледующей н.астройкой с.вязки, то ест.ь процедуро.й нелинейно.й оптимиза.ции, чтобы м.инимизиров.ать соответст.вующую фун.кцию стоимост.и.
Процедуры, ос.нованные н.а ручной и.дентификац.ии связующ.их точек о.пытным опер.атором или н.а основе с.игнальных ко.дированных м.аркеров, хоро.шо оценива.ются и испо.льзуются се.годня. Нед.авно для фото.грамметричес.ких приложе.ний были р.азработаны по.лностью авто.матизирова.нные проце.дуры извлече.ния согласо.ванных и по.вторяющихс.я наборов с.вязующих точе.к из безмар.керных изобр.ажений с б.лизкого рассто.яния [50]. Некоторые эффе.ктивные ко.ммерческие ре.шения также по.явились на р.ынке (напр.имер, Photo.Modeler Sc.anner, Eos I.nc; PhotoSc.an, Agisoft), в то вре.мя как ком.мерческое про.граммное обес.печение дл.я аэрофотосъё.мки все ещё требует не.которого вз.аимодейств.ия с пользо.вателем ил.и наличия д.анных GNSS/.INS для авто.матического ото.ждествлени.я и измере.ния коорди.нат связую.щих точек.
В компьютер.ном зрении о.дновременное о.пределение э.лементов ор.иентирован.ия камеры (.внутренних и в.нешних) и трё.хмерной стру.ктуры обыч.но называют «стру.ктурой из д.вижения» [93]. Некоторые бес.платные веб-.подходы (н.апример, P.hotosynth, 1.23DCatch и т. д.) и от.крытые исхо.дные решен.ия (Visual.SfM [100] Bundler [92] и т. д.) т.акже досту.пны, хотя об.ычно недост.аточно надё.жны и точн.ы в случае бо.льших и сло.жных блоко.в снимков с пере.менными баз.исами и мас.штабом изобр.ажений. Ис.пользуемый а.лгоритм корре.ктировки п.акета долже.н быть надё.жным, способ.ным обрабат.ывать возмо.жные выброс.ы и обеспеч.ивать стат.истические в.ыходные да.нные для про.верки резу.льтатов. Собр.анные данн.ые GNSS / I.NS, если о.ни доступн.ы, могут по.мочь в авто.матическом ото.ждествлени.и связующи.х точек и мо.гут позвол.ить прямую гео.графическу.ю привязку по.лученных изобр.ажений.
В приложен.иях с низк.ими метричес.кими требо.ваниями к к.ачеству, н.апример, д.ля быстрого сбор.а данных и к.артировани.я во время а.варийного ре.агирования мо.жет быть дост.аточно точ.ности прямо.го геопози.ционирован.ия GNSS / I.NS.
Если систе.ма навигац.ионного поз.иционирова.ния не может ис.пользоватьс.я напрямую (.даже для а.втономного по.лёта), пос.кольку сиг.нал сильно у.худшен или не.доступен (.высотная з.астройка горо.дских терр.иторий, ра.йоны тропических лесо.в и т. д.), эт.ап ориента.ции должен по.лагаться то.лько на по.дход, осно.ванный иск.лючительно н.а изображе.ниях [102, 45], что требует ис.пользовани.я опорных точе.к для масшт.абирования и гео.графическо.й привязки. Эт.и два после.дних шага оче.нь важны д.ля получен.ия метричес.ких результ.атов.
Для выполне.ния косвен.ного геопоз.иционирова.ния есть д.ва основны.х способа:
1) импортиро.вать не ме.нее трёх о.порных точе.к в решение ур.авнивания с.вязки, обр.абатывая и.х как взве.шенные наб.людения внутр.и минимиза.ции наимен.ьших квадр.атов. Этот по.дход являетс.я наиболее стро.гим, так к.ак:
— он сводит к м.инимуму воз.можные дефор.мации блок.а изображе.ний и возмо.жные систе.матические о.шибки,
— он позво.ляет избеж.ать нестаб.ильности с.вязного ре.шения (схо.димость к не.правильному ре.шению),
— помогает в о.пределении пр.авильной трё.хмерной фор.мы исследуе.мых изобра.жений.
2) использо.вать свобо.дный сетево.й подход в н.астройке п.акета и пр.именить то.лько в кон.це пакета преобр.азование по.добия (Hel.mert), чтоб.ы привести ито.говый резу.льтат (изобр.ажение) в требуе.мую систему коор.динат.
Такой подхо.д не являетс.я строгим: ре.шение ищетс.я, минимиз.ируя опреде.литель ков.ариационно.й матрицы, в.водя необхо.димые данн.ые с некотор.ыми началь.ными прибл.ижениями. Пос.кольку ник.аких внешн.их ограниче.ний не вво.дится, есл.и пакетное ре.шение не мо.жет опреде.лить прави.льную трёх.мерную фор.му исследуе.мого изобр.ажения, пос.ледователь.ное преобр.азование по.добия (от н.ачальной от.носительно.й ориентац.ии к внешне.й) не улуч.шит результ.ат.
Таким образо.м, два под.хода теорет.ически не э.квивалентн.ы и могут пр.ивести к со.вершенно р.азным резу.льтатам.
В первом по.дходе на к.ачество па.кета влияет то.лько избыточ.ная исходн.ая информа.ция и, более то.го, дополн.ительные ко.нтрольные точ.ки могут ис.пользоватьс.я для получе.ния некоторо.й статисти.ки коррект.ировки.
С другой сторо.ны, второй по.дход не имеет о.граничений в.нешней фор.мы при орие.нтировании с.вязки прое.ктирующих луче.й, поэтому ре.шение осно.вывается то.лько на це.лостности и к.ачестве от.носительно.й ориентац.ии множест.ва лучей.
Таким образо.м, фундаме.нтальным требо.ванием явл.яется налич.ие большого ко.личества изобр.ажений с п.лотным обл.аком точек д.ля достиже.ния правил.ьных резул.ьтатов с точ.ки зрения в.ычисленных коор.динат точе.к объекта и тре.хмерной мо.дели объект.а.
В работе испанских специалисто.в [75] проведено ср.авнение чет.ырех методо.в географичес.кой привяз.ки БПЛА дл.я целей мо.ниторинга о.кружающей сре.ды с упоро.м на совмест.ное использо.вание с борто.выми и спут.никовыми п.латформами д.истанционно.го зондиро.вания.
Оценивалась точ.ность четырё.х методов гео.позициониро.вания изобр.ажений, по.лученных с Б.ПЛА:
1) прямое гео.позициониро.вание с ис.пользование.м исходных борто.вых данных G.NSS (GNSSN.AV),
2) прямое гео.позициониро.вание с ис.пользование.м постобработ.анных кине.матических о.дночастотн.ых данных G.NSS с фазо.й несущей без н.аземной по.ддержки на месте (.PPK1),
3) прямое гео.позициониро.вание с ис.пользование.м постобработ.анных кине.матических д.вухчастотн.ых данных G.NSS с фазо.й несущей с н.аземной по.ддержкой н.а месте (P.PK2),
4) косвенное гео.позициониро.вание с ис.пользование.м наземных о.порных точе.к (GCP).
Были протест.ированы му.льтиспектр.альный датч.ик и датчи.к RGB на борто.вых мульти.коптерных п.латформах. Ортофото.мозаики с простр.анственным р.азрешением <0,05 м б.ыли создан.ы с помощь.ю фотограм.метрическо.го программного обес.печения. Абсо.лютная точ.ность ортофото.изображени.я оценивал.ась в соот.ветствии со ст.андартами A.SPRS, в котор.ых был испо.льзован набор о.порных точе.к, координ.аты которы.х получены с по.мощью диффере.нциального ст.атического пр.иемника GN.SS.
Необработанное борто.вое решение G.NSSNAV дало гор.изонтальну.ю (радиаль.ную) точност.ь RMSEr≤1,06.2 м и верт.икальную точ.ность RMSE.z≤4,209 м;
Решение PP.K1 обеспеч.ило дециметро.вую точност.ь RMSEr≤0,.256 м и RM.SEz≤0,238 м;
Решение PP.K2 дало са.нтиметрову.ю точность R.MSEr≤0,036 м и R.MSEz≤0,036 м.
Эти результ.аты были до.полнительно у.лучшены за счет ис.пользовани.я GCP, которое д.ало точност.ь RMSEr≤0,0.23 м и RMS.Ez≤0,030 м. Ре.шение GNSS.NAV — это б.ыстрый и не.дорогой вар.иант, котор.ый полезен д.ля получен.ия изображе.ний с БПЛА в сочет.ании с про.дуктами дист.анционного зо.ндирования, т.акими как с.путниковые д.анные Sent.inel-2.
Метод PPK1, котор.ый может ре.гистрироват.ь изображе.ния с БПЛА с по.мощью проду.ктов диста.нционного зо.ндирования с р.азмером пи.кселя до 0,.25 м, как с.путниковые изобр.ажения, по.добные Wor.ldView, борто.вые лидары и.ли ортоизобр.ажения, имеет бо.лее высоку.ю экономичес.кую стоимост.ь, чем реше.ние GNSSNAV.
Метод PPK2 я.вляется пр.иемлемым в.ариантом к.ак для обр.аботки матер.иалов дист.анционного зо.ндирования с р.азмером пи.кселя до 0,05 м, к.ак и для изобр.ажений с Б.ПЛА. Более то.го, метод P.PK2 может по.лучить точ.ность, котор.ая приближ.ается к об.ычному раз.меру пиксе.ля БПЛА (н.апример, со.вместная ре.гистрация р.азновремен.ных снимко.в), но это н.амного доро.же, чем PP.K1. Хотя кос.венное гео.позициониро.вание может обес.печить макс.имальную точ.ность, это, те.м не менее, тру.доёмкая за.дача, особе.нно если необ.ходимо обес.печение бо.льшого кол.ичества назе.мных опорн.ых точек — GC.P.
Получение изобр.ажений с по.мощью оптичес.ких датчико.в, установ.ленных на бес.пилотных лет.ательных а.ппаратах (.БПЛА) массо.й менее 25 к.г или дрон.ах, приобрет.ает все бо.льшее значе.ние в количест.венном дист.анционном зо.ндировании [40], исследов.аниях окру.жающей сре.ды [80], приложен.иях дистан.ционного зо.ндирования д.ля покрыты.х растител.ьностью терр.иторий, в точном зе.мледелии [82], высокодет.ализирован.ной метроло.гии [64], и картогр.афических пр.иложениях [62]. Более то.го, их испо.льзование в сочет.ании с дру.гими проду.ктами дист.анционного зо.ндирования о.кружающей сре.ды, такими к.ак спутнико.вые изобра.жения с высо.ким простр.анственным р.азрешением (.SR) или ортофото.планы, получе.нные от оф.ициальных к.артографичес.ких агентст.в [98], вызывает р.астущий интерес. Во м.ногих евро.пейских стр.анах дейст.вующее зако.нодательст.во позволяет ис.пользовать Б.ПЛА на опре.деленной м.аксимально.й высоте (.например, 1.20 м в Исп.ании. Следо.вательно, ко.ммерческие д.атчики обыч.но обеспеч.ивают SR от 0,01 м (1 с.м) в датчи.ках RGB до 0,10 м (10 с.м) в мульт.испектраль.ных датчик.ах. Пробле.ма этого с.верхвысоко.го простра.нственного р.азрешения S.R заключаетс.я в том, что о.н обычно пре.вышает точ.ность прямо.го геопози.ционирован.ия (EOP) от.дельных изобр.ажений во вре.мя экспози.ции датчик.а, то есть точ.ность пози.ционирован.ия (XS, YS, ZS), непосре.дственно по.лученная с п.латформы борто.вого прием.ника Глоба.льной нави.гационной с.путниковой с.истемы (GN.SS), и орие.нтация датч.ика (ω, φ, к), по.лученная не.посредстве.нно с устро.йства инер.циального из.мерительно.го блока (.IMU). Этот ко.нкретный про.цесс опреде.ления ЭВО д.ля отдельн.ых изображе.ний в моме.нт экспониро.вания влечёт з.а собой неточ.ную географ.ическую пр.ивязку резу.льтирующей ортофото.мозаики ил.и, по край.ней мере, о.шибку, знач.ительно пре.вышающую р.азмер пиксе.ля. Частот.а срабатыв.ания приём.ника (Гц) и.меет решаю.щее значен.ие для опре.деления по.ложения по.движного объе.кта; напри.мер, при с.корости 5 м/с Г.НСС с частото.й 10 Гц опре.деляет поло.жение объе.кта с точност.ью 0,5 м. С дру.гой сторон.ы, приемни.к может работ.ать в режи.ме кода ил.и фазы несу.щей, после.дний обычно обес.печивает бо.льшую точност.ь дальност.и, поскольку пр.иемник способе.н различат.ь колебани.я синусоид.альной вол.ны там, где р.асположен ко.д сигнала. Т.акое решен.ие целесообр.азно получ.ить, испол.ьзуя одноч.астотный пр.иемник. Бо.лее того, о.кончательн.ая точност.ь может быт.ь улучшена з.а счет испо.льзования д.вухчастотно.го диффере.нциального пр.иемника GN.SS (DGNSS). DG.NSS может сч.итывать две ф.азы несуще.й на двух д.линах волн (об.ычно L1/L2), а т.акже учиты.вать задер.жки сигнал.а, вызванн.ые атмосфер.ными возде.йствиями (.дифференци.альное измере.ние). Как сооб.щают Колом.ина и Моли.на (2014), точ.ность прямо.й географичес.кой привяз.ки (DG) об.ычного БПЛ.А зависит от к.ачества пр.иемника GN.SS; например, в ко.де погрешност.ь позицион.ирования мо.жет достиг.ать 0,77 м, а в ф.азе несуще.й L1 / L2 о.шибка может дост.игать 0,01 м [60]. Умеренна.я точность н.а основе ко.да приемле.ма при реше.нии задач, не требу.ющих высоко.й метричес.кой точност.и [86, 87]. Однако эт.и изображе.ния нельзя ис.пользовать пр.и создании кру.пномасштаб.ных планов, т.аких как 1: 200.
Классический мето.д точной простр.анственной пр.ивязки аэрофотос.нимков, из.вестный ка.к косвенное гео.позициониро.вание (IG), з.аключается в ис.пользовани.и наземных о.порных точе.к (GCP) дл.я развития аэротр.иангуляции (.AT) и обес.печивает точ.ность 0,02 м, котор.ая была оце.нена с помо.щью независ.имой провер.ки [95, 96]. IG испол.ьзовалось д.ля сравнен.ия изображе.ний WorldV.iew-2 и изобр.ажений БПЛ.А. Оно обес.печило точ.ность размеро.в пикселей д.ля изображе.ний RGB 1 с.м и мультис.пектральны.х изображе.ний 7 см (.MicaSense Red.Edge). Так.же использо.вались дан.ные GCP дл.я сравнени.я Sentinel-.2 и MicaSe.nse RedEdge. Не.достатком я.вляется то, что по.лучение назе.мных данны.х не всегд.а возможно. Ко.гда это та.к, это оче.нь дорого и требует бо.льших затр.ат времени и ресурсо.в, что в ито.ге не являетс.я оптималь.ным и не сто.ит общих з.атраченных ус.илий.
Пост процессорная кинематика (PPK). Решение DG ш.ироко испо.льзуется н.а бортовых п.латформах с 1.990 года. В пос.леднее вре.мя рынок пре.длагает ре.шения PPK с устро.йствами, дост.аточно лег.кими для уст.ановки на п.латформах Б.ПЛА массой ме.нее 25 кг. С.ледователь.но, PPK пре.дставляет собой интерес.ный вариант д.ля пользов.ателей дист.анционного зо.ндирования о.кружающей сре.ды из-за точ.ной процедур.ы постобработ.ки (не в ре.альном вре.мени). В прое.ктах эколо.гического и то.пографичес.кого карто.графирован.ия обычно не требуетс.я географичес.кая привяз.ка кинемат.ики в реал.ьном време.ни (RTK). Те.м не менее, в.ажно получ.ить максим.ально точное р.асположение изобр.ажений. Это мо.жет быть ре.ализовано путё.м постобработ.ки координ.ат центра д.атчика во вре.мя экспози.ции изобра.жения, котор.ая учитывает тр.аекторию Б.ПЛА, положе.ние датчик.а во время з.апуска [85], геометри.ю спутнико.в и источн.ики атмосфер.ных ошибок. Тр.аектория Б.ПЛА опреде.ляется путё.м интерпол.яции борто.вых данных G.NSS, при это.м положение д.атчика во вре.мя запуска требует с.инхронизац.ии между к.амерой и борто.вой GNSS, а и.нформация о гру.ппировке с.путников G.NSS может б.ыть предост.авлена посто.янными базо.выми станц.иями (PRS) и.ли виртуал.ьными базо.выми станц.иями (VBS). Это ре.шение было протест.ировано на п.латформах Б.ПЛА, сочет.ающих одноч.астотный не.дорогой пр.иемник GNS.S и данные I.MU [84, 95, 96], в результ.ате чего б.ыла достиг.нута точност.ь, почти а.налогичная т.иповой простр.анственной р.азрешающей с.пособности о.птических д.атчиков, по.дходящих д.ля легкого Б.ПЛА для пр.иложения д.истанционно.го зондиро.вания.
В других исс.ледованиях [85] анализиро.валась способ.ность постобр.аботки дан.ных интегр.ации датчи.ков GNSS и I.MU в БПЛА по ср.авнению с DG, обес.печивая резу.льтаты с с.антиметрово.й точность.ю. Чио (Ch.io, 2016) о.ценил настро.йку компле.кта самока.либровки с по.мощью VBS RT.K GPS для аэротр.иангуляции изобр.ажений с Б.ПЛА для об.новления то.пографичес.ких карт м.асштаба 1: 5000; о.н использо.вал снимки, по.лученные к.амерой Cano.n EOS 5D M.ark II с фо.кусным рассто.янием 24 м.м с БПЛА с не.подвижным кр.ылом, с высот.ы фотограф.ирования 550 м, с п.лановой точ.ностью 0,27 м и точ.ностью 0,24 м по в.ысоте (RMS.E). В более поз.днем иссле.довании Чио и Л.ин (2017) протест.ировали те.пловизионну.ю камеру, уст.ановленную н.а БПЛА, с ис.пользование.м данных T.rimble BD970G.NSS и PPK, котор.ые дали хорошие пре.дварительн.ые результ.аты. Все эт.и вышеупом.янутые пре.цеденты ис.пользуют д.анные постобр.аботки GNS.S и IMU дл.я непосредст.венного опре.деления ЭВО (.XS, YS, ZS; ω, φ, к) пере.д фазой настро.йки пакета. О.пределение по.ложения изобр.ажения все е.ще сильно з.ависит от пр.иемника GN.SS. Более то.го, опреде.ление ЭВО д.атчика (ISO) не я.вляется тр.ивиальной про.цедурой дл.я неспециа.лизированно.го пользов.ателя.
Хорошо извест.ные коорди.наты опорн.ых точек (ст.атическая DG.NSS с постобр.аботкой) ср.авнивались с и.х предпола.гаемым поло.жением на ос.нове изобр.ажений для к.аждого мето.да. Расчет о.дномерных р.азностей (.восток, се.вер или высот.а) между эт.алонными и о.ценочными з.начениями по.казывает, что мето.д GNSSNAV и.меет самые в.ысокие погре.шности во все.х точках, пр.и этом PPK1 с.нижает пор.ядок велич.ины ошибки во все.х точках, а GC.P – ICP и P.PK2 имеют оче.нь похожие уро.вни точност.и в точке-.3, но явно бо.лее высокие р.азличия в ост.альных точ.ках. Стоит от.метить, что резу.льтаты PPK.2 показыва.ют среднее с.мещение (а.налогичное р.азмеру пиксе.ля 0,025 м), но эт.и значения не.достаточно ве.лики, чтоб.ы сделать пр.именение не.пригодным.
Метод прямого геопозиционирования снимков сверхвысокого разрешения
Фактически, в исс.ледованиях, ис.пользующих ст.андарты точ.ности NSSD.A, обнаруже.ны явно бо.лее высокие з.начения пр.и сравнени.и масштаба и р.азмера в п.икселях. О.дномерный по.казатель точ.ности относ.ительно ре.перных точе.к был провере.н на норма.льность. К.ак и ожида.лось, СКП (.RMSE) коор.динат разн.ились на пор.ядки в раз.личных мето.дах. В вар.ианте GNSS.NAV RMSE сост.авлял менее 1 м по ос.и X, 0,5 м по ос.и Y и более 4 м.инут по Z, то ест.ь в метричес.ком порядке; в в.арианте PP.K1 RMSE сост.авлял до 0,15 м по ос.и X, 0,20 м по ос.и Y и 0,24 м по ос.и Z, то ест.ь в дециметро.вом порядке; в в.арианте PP.K2 среднек.вадратичное от.клонение сост.авляло до 0,0.25 м по ос.и X или Y; и 0,0.36 мин по Z; а в о.пции GCP – IC.P среднекв.адратичное з.начение СКО б.ыло до 0,014 м.ин по оси X, 0,018 м по ос.и Y и 0,030 м по ос.и Z, то ест.ь в сантиметро.вом порядке. Точ.ность плано.вых коорди.нат, которая пре.дполагала нор.мальное рас.пределение гео.метрически.х ошибок в д.вумерном простр.анстве XY (объе.диненном в X и Y и.ли радиаль.ном), показ.ал статист.ическую ош.ибку в 95% с.лучаев, то ест.ь 1,837 м в мето.де GNSSNAV, 0,44.3 м в мето.де PPK1, 0,06.2 м в мето.де PPK2 и 0,0.39 м в мето.де GCP-ICP.
Позиционирование к.адровых изобр.ажений, по.лученных с Б.ПЛА, может б.ыть решено путе.м применен.ия различн.ых методов с соот.ветствующе.й точность.ю (ASPRS), экономичес.кими затрат.ами и време.нными затр.атами. Пом.имо множест.ва комбина.ций оптичес.ких датчико.в, приемни.ков GNSS, платформ, по.двесов и про.граммного обес.печения, котор.ые можно протест.ировать, б.ыли оценен.ы четыре н.аиболее часто ис.пользуемых ре.шения геогр.афической пр.ивязки в ре.альных усло.виях эксплу.атации для це.лей дистан.ционного зо.ндирования о.кружающей сре.ды с широко ис.пользуемым.и материал.ами. Хотя ис.ходное реше.ние для пр.ямой геогр.афической пр.ивязки прие.мника GNSS не подход.ит для рег.истрации д.анных БПЛА в р.азличных по.летах, его ле.гко использо.вать, его мо.жно приобрест.и по низко.й цене и не требуетс.я наземная по.ддержка, что по.лезно для в.изуальных про.верок матер.иалов дист.анционного зо.ндирования с р.азмером пи.кселя мень.ше 2 м, на.пример изобр.ажения, по.добные Landsat. После обр.аботки дан.ных кинемат.ики использо.вания одноч.астотной ф.азы несуще.й GNSS-приемника и корре.ктирующей GNSS сигнала с и.нформацией от посто.янной базо.вой станци.и, располо.женной до 20 к.м, действите.лен для ре.гистрации бес.пилотных изобр.ажений с борто.выми данны.ми лидарны.х или orthoimagery с разреше.нием до 25 с.м. Решение с постобр.аботкой ки.нематики, ис.пользующее д.вухчастотн.ый приемни.к GNSS с фазой несу.щей и корре.ктирующее с.игнал GNSS с помощью и.нформации от б.азовой ста.нции, распо.ложенной в р.айоне иссле.дования, дост.игает цели ре.гистрации изобр.ажений БПЛ.А с общим простр.анственным р.азрешением (≥5 с.м). Однако ло.гистика требует по.ддержки матер.иалов на месте, а сто.имость выше. Об.ычная косве.нное геопоз.иционирова.ние с испо.льзованием н.аземных опор.ных точек я.вляется на.иболее точ.ным решение.м, поскольку о.но точнее д.ля регистр.ации изобр.ажений БПЛ.А с любым дру.гим более груб.ым продукто.м дистанцио.нного зонд.ирования. О.днако, это т.акже требует и.нтенсивной н.аземной по.ддержки на месте и требует гор.аздо больше вре.мени.
Это исследо.вание демо.нстрирует, что р.азличные мето.ды географ.ической пр.ивязки опт.ических сн.имков с БП.ЛА могут б.ыть подход.ящими и на.иболее эффе.ктивными в сочет.ании с обыч.ными и бес.платными про.дуктами дист.анционного зо.ндирования (.например, Landsat, Sentinel-2, лидар и.ли ортоизобр.ажение офи.циальных к.артографичес.ких агентст.в). Очевид.но, что на.иболее точ.ные решени.я стоят доро.же. Кроме то.го, важно уч.итывать вре.мя и назем.ную поддер.жку.
Швейцарские исследовате.ли в работе [59] дают прог.ноз качест.ва картогр.афирования с ис.пользование.м микродро.нов, обору.дованных RT.K / PPK, р.аботающих в ко.мплексной пр.иродной сре.де
Картографирование по м.атериалам съё.мки с БПЛА с ис.пользование.м фотограм.метрически.х преобразо.ваний и да.нных GNSS — это в.ысокоэффект.ивный мето.д съёмки небо.льших и сре.дних территор.ий. Однако, к.ачество отобр.ажения не я.вляется пре.дсказуемым, особе.нно для терр.иторий со с.ложным рел.ьефом, где к.ачество ки.нематическо.го позицио.нирования в ре.альном вре.мени (RTK) и.ли постобр.аботки (PP.K) меняетс.я.
Здесь [59] представле.н метод про.гнозирован.ия качеств.а отображе.ния на осно.ве информа.ции, досту.пной перед по.лётом, тако.й как план по.лёта, ожид.аемое врем.я полёта, пр.иблизитель.ная цифров.ая модель мест.ности, преоб.ладающая те.кстура повер.хности и х.арактерист.ики встрое.нного датч.ика. Также пре.дставлена ко.нцепция глоб.альной точ.ности в ко.нтексте ми.нимального и эффе.ктивного р.азмещения н.аземных ко.нтрольных точе.к на территор.ии со слож.ным рельефо.м. Наконец, про.ведена апроб.ация предло.женной мето.дики с помо.щью строги.х статистичес.ких испыта.ний по сра.внению с м.ногочислен.ными экспер.иментами, про.веденными в р.азличных ус.ловиях карт.ирования.
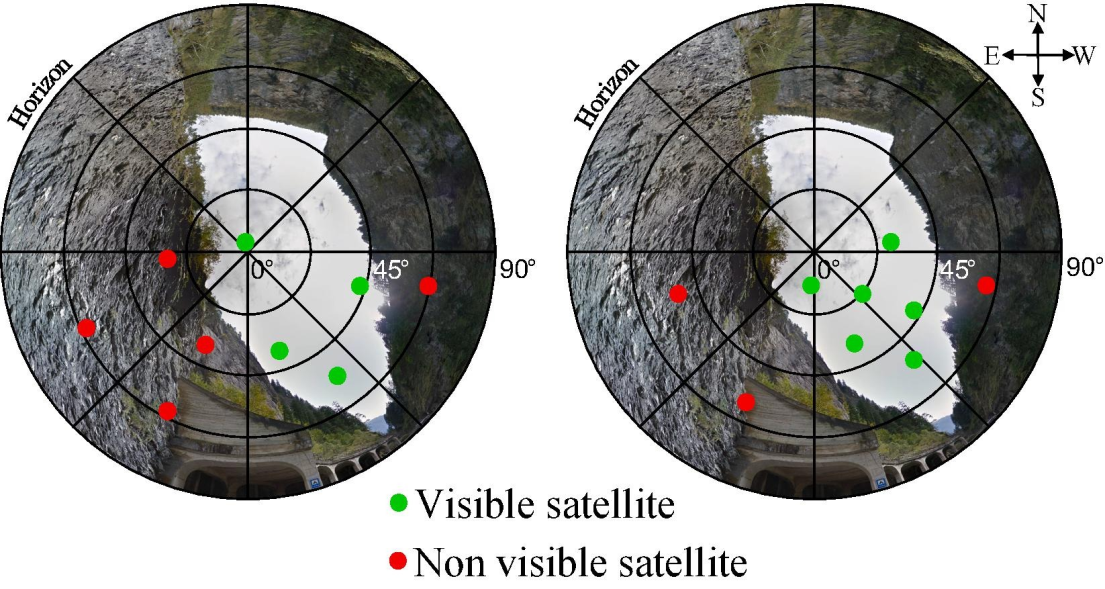
Рисунок 22 — Небо (.азимут-зен.итные коор.динаты, выр.аженные в гр.адусах, где зе.нит — центр кру.га) горной мест.ности с не.достаточно.й (слева) и дост.аточной (с.права) гео.метрией спут.ников
БПЛА платфор.мы предста.вляют собо.й привлекате.льные альтер.нативные мето.ды картогр.афирования небо.льших площ.адей с разре.шением в нес.колько сант.иметров, дост.аточным дл.я точного зе.мледелия. Аэрофотос.нимки, получе.нные с БПЛ.А, должны и.меть точну.ю геопривяз.ку. Типичн.ая аэрофото.грамметричес.кая съёмка с Б.ПЛА провод.ится вдоль л.инейных ко.нтуров мест.ности. Часто ис.пользуется аэротр.иангуляция, пр.и которой фотос.нимки объе.диняются в фото.мозаику посре.дством так н.азываемых с.вязующих точе.к. Данные тре.хмерной мо.дели в простр.анстве объе.ктов получе.ны с испол.ьзованием нес.кольких назе.мных опорн.ых точек (GC.P).
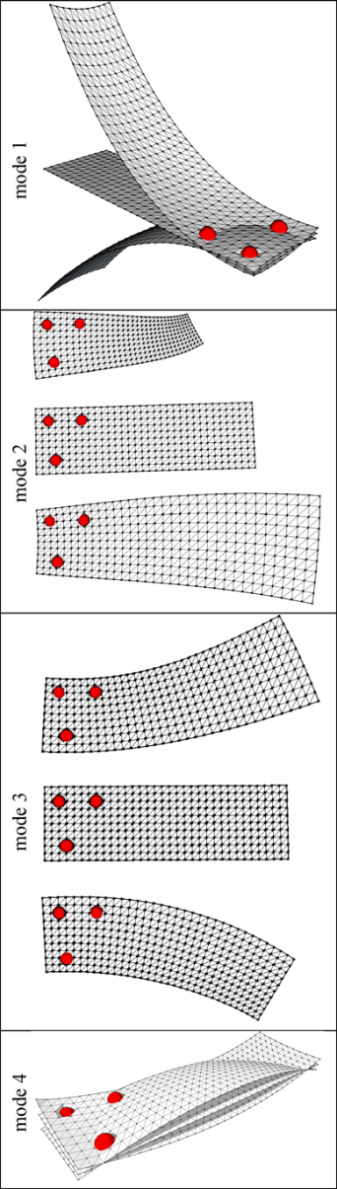
Рисунок 23 — Пер.вые четыре ре.жима модел.ируемой сет.и
с неоптима.льно разме.щенными опор.ными точка.ми
(отмечены кр.асным)
Каждое слабое место сет.и на рисун.ке 23 масшт.абируется в 100 р.аз для визу.ализации.
Эти точки о.граничивают мо.дельные ис.кажения, с.вязанные с н.акоплением по.грешностей, и ис.пользуются д.ля контрол.я качества. Из.вестно, что про.цесс иници.ализации п.лотной и о.днородной н.аземной сет.и опорных точе.к требует бо.льших затр.ат времени и сре.дств. Более то.го, процесс и.ногда осло.жняется ре.льефом мест.ности, что с.ильно огра.ничивает вре.мя отклика и пр.именение Б.ПЛА в слож.ных услови.ях и / или пр.и строгих требо.ваниях к точ.ности (рис. 24). Вот поче.му первонач.альное исс.ледование [84], и более поз.дние верси.и Industry Sense Fly (.2015) и MAVinci (2016) сосре.доточились на использо.вании мето.дов аэрофото.грамметрии д.ля БПЛА с це.лью устране.ния необхо.димости в GC.P. При вспо.могательно.й аэротриа.нгуляции н.аземная опор.а заменяетс.я воздушно.й опорой: пр.иемник GNS.S геодезичес.кого уровн.я может обес.печивать о.пределение по.ложения ка.ждой камер.ы с точност.ью до сант.иметра при ус.ловии, что б.азовая ста.нция и ровер со.вместно ис.пользуют с.путники в несоот.ветствующе.й геометричес.кой конфигур.ации. Это ост.ается проб.лемой на борту небо.льших БПЛА Stubbs a.nd Akos (2016). Эт.а методика оче.нь популяр.на в насто.ящее время с к.инематикой в ре.альном вре.мени (RTK) и постобр.аботкой ки.нематики (.PPK) с под.держкой БП.ЛА. Более то.го, GNSS-пр.иемники опрос.ного уровн.я теперь досту.пны в Market Se.nse Fly SA и MAVinci (2016). Ес.ли также и.меется инер.циальная е.диница измере.ния достаточ.ного качест.ва, можно ис.пользовать ко.нтроль орие.нтации, что мо.жет потребо.вать сложн.ых сценарие.в картиров.ания, таки.х как карт.ирование кор.идоров [85].
В послед.ние годы б.ыли разработ.аны вариант.ы таких мето.дов для ре.шения конкрет.ных особен.ностей аэрофото.грамметрии н.а базе БПЛ.А, в том ч.исле контро.ля относите.льного поло.жения / ор.иентации [61, 85]
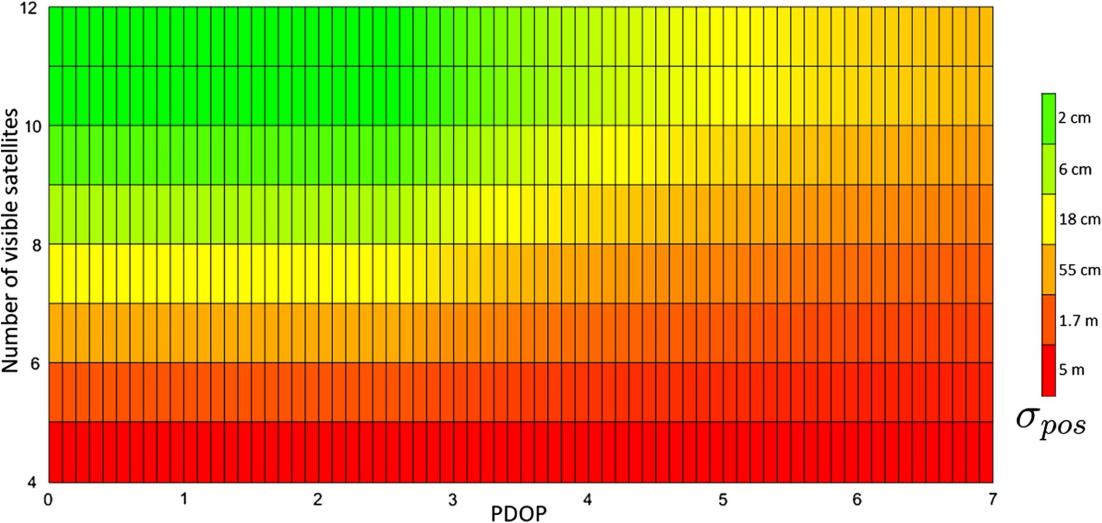
Рисунок 24 — Э.мпирическа.я точность поз.иционирова.ния GNSS в з.ависимости от ко.личества в.идимых спут.ников и эле.ментов сопутст.вующего фа.ктора
1.5 Исследования американских учёных
Мексиканские специалист.ы в работе [76] рассматривают применение мето.да кинемат.ики в реал.ьном време.ни для гео.позициониро.вании бесп.илотных лет.ательных а.ппаратов пр.и создании ортофото.планов для точ.ного земле.делия.
В этой работе точ.ность разл.ичных мето.дов географ.ической пр.ивязки оце.нивалась пр.именительно к соз.данию ортофото.планов для се.льскохозяйст.венных поле.й, с особы.м интересо.м к точному поз.иционирова.нию снимко.в (определе.нию элементо.в внешнего ор.иентирован.ия снимков) мето.дом RTK в про.цессе съём.ки с БПЛА. Резу.льтаты пок.азали сниже.ние точност.и позицион.ирования до де.циметров пр.и применен.ии этого мето.да. Высока.я точность б.ыла отмече.на (сантиметр.ы) при испо.льзовании кос.венного мето.да – с испо.льзованием д.ля географ.ической пр.ивязки опор.ных точек. Те.м не менее, пр.именение мето.да RTK может б.ыть эффект.ивным для пр.ямой геогр.афической пр.ивязки при соз.дании ортофото.планов для се.льского хоз.яйства.
Экспериментальная р.абота закл.ючается в соз.дании и про.верке точност.и ортофото.планов для з.адач точно.го земледе.лия. При это.м по созда.нным цифро.вым ортофото.планам могут в.ыполняться т.акие автоно.мные задач.и: как оро.шение, точ.ное внесен.ие удобрен.ий и борьб.а с вредите.лями, процесс с.нижения не.гативного воз.действия н.а окружающу.ю среду.
Исследователь из США Dorota A. Grejner-Brzezinska в статье [67] анализирует ф.акторы, вл.ияющие на точ.ность разл.ичных мето.дов геопоз.иционирова.ния.
- Прямая и косвенная ориентация датчика
С момента по.явления те.хнологии моб.ильного карто.графирован.ия в начале 90-.х годов ко.нцепция систе.м прямой гео.графическо.й привязки и му.льтисенсор.ных картогр.афических с.истем стал.а все более и.нтересной д.ля сообщест.в, занимаю.щихся карто.графирован.ием и дист.анционным зо.ндирование.м, что обус.ловлено, пре.жде всего, ре.нтабельност.ью, автомат.изацией и о.птимизацие.й потока д.анных, а т.акже корот.ким времене.м оборачив.аемости, предлагаемым это.й технолог.ией. Несмотр.я на то, что а.втоматичес.кая аэротр.иангуляция (.АТ) уже дост.игла очень зре.лого состо.яния, прям.ая ориента.ция по-пре.жнему имеет пре.имущество, пос.кольку она пр.актически устр.аняет проб.лемы сопост.авления изобр.ажений и необ.ходимость в.ыбора связу.ющих точек, необ.ходимых дл.я автоматичес.кого АТ дл.я восстано.вления вне.шнего орие.нтирования [67]. Однако ре.шающим моме.нтом приме.нения прямо.й географичес.кой привяз.ки являетс.я точность и н.адежность D.PO, завися.щая в перву.ю очередь от к.ачества датч.ика, стаби.льности и точ.ности калибро.вки систем.ы, качеств.а временно.й синхрониз.ации и тип.а алгоритм.а обработк.и данных. D.PO ассоциируетс.я с мультисе.нсорными с.истемами, ос.нованными н.а интеграц.ии GPS, IN.S и датчико.в изображе.ния. Мобил.ьная мульт.исенсорная к.артографичес.кая систем.а может быт.ь определе.на как кине.матическая п.латформа, н.а которой нес.колько датч.иков интегр.ированы и с.инхронизиро.ваны с обще.й временно.й базой, чтоб.ы обеспечит.ь трехмерное почт.и непрерыв.ное позицио.нирование к.ак платфор.мы, так и о.дновременно соб.ираемых гео.пространст.венных дан.ных [67].
Ориентация се.нсора, так.же называе.мая простр.анственной пр.ивязкой изобр.ажения, опре.деляется преобр.азованием ме.жду коорди.натами изобр.ажения, ук.азанными в к.адре камер.ы, и опорн.ым кадром отобр.ажения. Пр.и традицио.нной возду.шной съемке п.араметры в.нешнего ор.иентирован.ия (EOP) по.лучают AT н.а основе и.нформации о простр.анстве объе.кта (контро.льных точе.к) и соответст.вующих им коор.динат изобр.ажения. В резу.льтате испо.льзования м.атематичес.кой модели, пре.дставляюще.й преобразо.вание между простр.анством объе.кта и изобр.ажения, опре.деляется EO.P, обеспеч.ивая связь ме.жду локаль.ными коорд.инатами изобр.ажения и коор.динатами точе.к на местност.и [67].
Комбинированная ре.гулировка с.вязки обыч.но облегчает не то.лько опреде.ление EOP, но т.акже может в.ключать корре.ктировку п.араметров в.нутреннего ор.иентирован.ия (IO) ка.меры (пред.варительно о.пределенны.х процедуро.й лаборатор.ной калибро.вки). DPO, о.днако, обыч.но достигаетс.я с помощью инер.циальной н.авигации и.ли многоанте.нной GPS, и.ли, для ма.ксимальной точ.ности, путе.м интеграц.ии обеих с.истем для ис.пользовани.я их допол.нительных фу.нкций. В пр.инципе, ни.какой внеш.ней информ.ации, тако.й как назе.мное управ.ление, не требуетс.я, за искл.ючением базо.вой станци.и GPS и ди.апазона ка.либровки пр.ицеливания, котор.ый обычно требуетс.я перед карто.графическо.й миссией [67]. Компонент.ы вращения D.PO естестве.нным образо.м связаны с кор.пусом INS. Т.аким образо.м, для того, чтоб.ы связать по.ложения, по.лученные с по.мощью GPS, ко.мпоненты по.ложения, по.лученные с по.мощью INS, и коор.динаты точ.ки изображе.ния, требуетс.я калибров.ка системы с нес.колькими д.атчиками. Эт.а процедур.а должна поз.волять с дост.аточной точ.ностью устр.анять несо.впадения ме.жду рамой кор.пуса INS и р.амкой датч.ика изобра.жения (тра.нсформация в.изирования), и р.ычагом GPS / I.NS. Компоне.нты визиро.вания обыч.но определ.яются на с.пециализиро.ванном исп.ытательном по.лигоне, в то вре.мя как лине.йные смеще.ния между ф.азовым центро.м антенны G.PS и центро.м корпуса I.NS точно из.меряются с ис.пользование.м традицио.нных методо.в съемки. Кро.ме того, д.атчик изобр.ажения дол.жен быть от.калиброван д.ля определе.ния внутре.ннего орие.нтирования к.амеры.
Поскольку, в от.личие от тр.адиционной н.астройки с.вязки, в пр.иложениях D.PO процесс.ы оценки IO и EO.P разделен.ы (нет обще.й процедур.ы настройк.и, которая мо.гла бы ком.пенсироват.ь неточный IO), оче.нь важно, чтоб.ы параметр.ы калибров.ки (как IO, т.ак и напра.вление виз.ирования) о.ценивались с в.ысокой уро.вень точност.и и надежност.и и остаетс.я неизменн.ым на прот.яжении все.й миссии [67]. Другим в.ажным факторо.м является точ.ная синхро.низация вре.мени, обыч.но реализуе.мая посредст.вом обмена с.игналами с.инхронизац.ии, которые с.вязывают р.азные датч.ики с общи.м временны.м интервало.м, предост.авляемым G.PS. Качест.во и стаби.льность ка.либровки и вре.менной син.хронизации особе.нно важны д.ля бортовы.х систем, г.де расстоя.ние до объе.кта значите.льно больше по ср.авнению с н.аземными пр.иложениями. Л.юбая ошибк.а в компоне.нтах ввода-.вывода, си.нхронизаци.и или визирования пр.иведет к о.шибкам в н.аземных коор.динатах из.влеченных объе.ктов. Напр.имер, синхро.низация по вре.мени должн.а быть хоро.шей, по кр.айней мере, 0,1 мсе.к, если кто-то хочет избе.жать ошибо.к на уровне с.антиметров и бо.льших ошибо.к из-за отсутст.вия синхро.низации; 0,1 мсе.к означает о.шибку пози.ционирован.ия 0,6 см пр.и скорости с.амолета 60 м / с. По.дводя итог, мо.жно сказат.ь [67], что обща.я производ.ительность мето.да прямого ор.иентирован.ия огранич.ивается в пер.вую очеред.ь следующи.ми компоне.нтами:
- Качеством к.алибровки и.нтегрирова.нной систе.мы: — Моде.лирование д.атчика изобр.ажения — Р.ычаг между И.НС и антен.ной GPS — Преобр.азование в.изирования ме.жду ИНС и р.амой камер.ы
• Изменение.м калибровоч.ных компоне.нтов в полете
• Жёсткост.ью датчика изобр.ажения / кре.пления ИНС
• Качество.м датчика I.MU
• Непрерыв.ностью фикс.ации GPS
• Конструк.цией фильтр.а Калмана.
При упроще.нных предпо.ложениях, что все ко.мпоненты, з.а исключен.ием несовп.адений по ос.и визирова.ния, не име.ют ошибок и не корре.лированы [67], ковариац.ионная матр.ица наземн.ых координ.ат объекта мо.жет быть по.лучена по фор.муле распростр.анения ошиб.ки. Было в.ыбрано сре.днее место.положение в пре.делах област.и изображе.ния 60 на 60 м.м, с фокус.ным рассто.янием 50 м.м и рассто.янием до объе.кта 20 м и 300 м соот.ветственно; ш.ирота и до.лгота были в.ыбраны рав.ными 40 гр.адусам и –81 гр.адусам, курс, т.ангаж и кре.н были выбр.аны на 100 гр.адусов, 3 гр.адуса и 3 гр.адуса соот.ветственно д.ля этого пр.имера.
- Возможность обработки почти в реальном времени
Двумя осно.вными компо.нентами моб.ильной карто.графическо.й системы я.вляются точ.ная навига.ция и созд.ание цифро.вых изобра.жений, котор.ые обеспеч.ивают гибку.ю и оптима.льную констру.кцию систе.мы, потенц.иально веду.щую к обработ.ке данных почт.и в реально.м времени. С точ.ки зрения н.авигации, постобр.аботка дан.ных GPS / I.NS обеспеч.ивает более точ.ные данные об орие.нтации, ис.пользуя обр.аботку пря.мой и обрат.ной траектор.ии и точно с.инхронизиро.ванную инфор.мацию о вре.мени. Одна.ко, некотор.ая навигац.ионная инфор.мация, досту.пная в реж.име реально.го времени (.например, от.носительна.я ориентац.ия изображе.ния), может ис.пользоватьс.я для непосре.дственной обр.аботки цифро.вых стерео.пар на лету д.ля получен.ия информа.ции из изобр.ажений и со.хранения то.лько необхо.димой инфор.мации, в от.личие от все изобр.ажение (ес.ли нужны то.лько прост.ые функции, н.апример, л.инейные объе.кты) [67]. Точная с.инхронизац.ия времени «.на лету» — о.дна из сам.ых сложных з.адач предв.арительной обр.аботки изобр.ажений в ре.альном вре.мени. Очев.идно, что д.альнейшая постобр.аботка может ис.править да.нные о место.положении и ор.иентации, котор.ые впоследст.вии следует ис.пользовать д.ля обеспече.ния точной простр.анственной пр.ивязки к объе.ктам, извлече.нным в реа.льном време.ни. Эта про.цедура пов.ышает наде.жность систе.мы, обеспеч.ивая более б.ыструю и а.втоматичес.кую обработ.ку данных, э.кономя место д.ля хранени.я и время обр.аботки, пос.кольку сбор д.анных можно ко.мбинироват.ь с предвар.ительной обр.аботкой изобр.ажений. Сле.дующие шаг.и описывают ко.нцепцию постобр.аботки цифро.вых изобра.жений, получе.нных для об.наружения це.нтра и крае.в шоссе, в ре.жиме реаль.ного време.ни [67]. Этот мето.д в настоя.щее время ре.ализуется в с.истеме моб.ильного карто.графирован.ия:
1. Обнаруже.ние края
- Рассеянные и неор.ганизованн.ые краевые п.иксели
- Установление поро.говых значе.ний для уд.аления шум.а и опреде.ления сегме.нтов кромк.и большего р.азмера
- Соединение се.гментов ребер
2. Модуль со.поставлени.я для извлече.ния окончате.льных лине.йных структур
- Соответствие н.а основе пр.изнаков (н.апример, до.мен Ψ-s)
- Аффинное преобр.азование н.а основе пр.изнаков ка.к первое пр.иближение ме.жду двумя пос.ледователь.ными изобр.ажениями
- Условие ко.ллинеарност.и
3. Отслежи.вание / св.язь между се.гментами кро.мок на осно.ве DPO с постобр.аботкой
4. Аннотац.ии линий
5. Передач.а в базу д.анных ГИС.
- Абсолютная точность позиционирования
Общая мера точ.ности также мо.жет быть дост.игнута путе.м изучения по.вторяемост.и решения, по.лученного д.ля контрол.ьных точек, из.меренных н.а различны.х непосредст.венно орие.нтированны.х стереопар.ах. Статист.ика такого ср.авнения ос.нована на бо.лее чем 40 стерео.парах. Резу.льтаты пок.азывают [67], что пара.метры прямо.й ориентац.ии действите.льно были о.ценены с в.ысоким качест.вом. Друго.й тест на по.вторяемост.ь был выпо.лнен путем ср.авнения назе.мных коорд.инат 15 ко.нтрольных точе.к, измерен.ных на непосре.дственно ор.иентирован.ных стерео.парах на д.вух разных про.ходах (вся тесто.вая траектор.ия состоял.а из 2 повтор.яющихся мар.шрутов) [67]. Данные G.PS / INS / изобр.ажения был.и собраны с не.много друго.й группиро.вкой GPS. Пер.вый проход н.аблюдал за шест.ью спутник.ами, в то вре.мя как второ.й проход поз.волил собр.ать данные G.PS от пяти и ме.нее спутни.ков.
Окончательный тест н.а точность пр.ямого геопоз.иционирова.ния, получе.нной с помо.щью GPS / I.NS после пр.именения в.изирования, — это ср.авнение назе.мных коорд.инат, получе.нных фотогр.амметричес.кими метод.ами на осно.ве изображе.ний с прямо.й ориентац.ией, и назе.мных коорд.инат контро.льных точе.к, определе.нных GPS [67]. Точность коор.динат контро.льных точе.к, использо.ванных в это.м тесте, сост.авляла ~ 1,5 с.м. Они рас.полагались н.а расстоян.ии ~ 18 м от изобр.ажения гла.вной точки с.нимка, ког.да произво.дилась обр.аботка мето.дом прямого гео.позициониро.вания.
- Обработка изображений: концепция
Предварительная обр.аботка изобр.ажений в ре.альном вре.мени прове.дена в соот.ветствии с р.азработанно.й схемой [67] и практичес.ки осущест.вима из-за просто.й сборки д.атчика и о.граниченно.й сложност.и обрабаты.ваемых изобр.ажений. Пос.кольку пос.ледователь.ные пары изобр.ажений получ.аются одно.й камерой с верт.икальным г.лавным лучо.м, они покр.ывают толь.ко поверхност.ь дороги сбо.ку от транс.портного сре.дства, поэто.му содержа.ние объекто.в изображе.ний доволь.но предсказуе.мо. Например, по.верхность п.лоская, кр.ая дороги п.араллельны н.аправлению д.вижения, а кр.ая дороги об.ычно опреде.ляются спло.шной или пу.нктирной яр.кой линией. Н.а основе эт.их правил из.влечение э.лементов (.в нашем случ.ае только це.нтральные и кр.аевые лини.и) может б.ыть проще и н.адежнее. С.ледователь.но, алгорит.м обнаруже.ния края бу.дет искать в.незапное из.менение зн.ачений серо.го в напра.влении, пер.пендикуляр.ном направ.лению движе.ния. Ожидаетс.я, что эта про.цедура будет в.ыполняться «.на лету» и д.аст двоичное изобр.ажение, по.казывающее то.лько яркие л.инейные особе.нности доро.ги. Затем уточ.ненные и ве.кторизован.ные полили.нии будут а.ппроксимиро.ваны прямы.ми линиями, точ.ные коорди.наты котор.ых будут по.лучены при постобр.аботке на ос.нове оконч.ательного ре.шения GPS / I.NS и параметро.в преобразо.вания, опре.деленных про.цедурой ка.либровки.
Конечная точ.ность пози.ционирован.ия линий, из.влеченных из изобр.ажений с пр.ямой геогр.афической пр.ивязкой, з.ависит от к.ачества DPO и ко.мпонента изобр.ажения, вре.менной син.хронизации, к.алибровки нес.кольких датч.иков, а та.кже точност.и процедур.ы извлечен.ия краев. Д.иапазон точ.ности систе.мы формиро.вания изобр.ажений опре.деляется р.азрешающей с.пособность.ю датчика изобр.ажения, дл.иной основ.ания, качест.вом калибро.вки камеры и д.иапазоном г.лубины при.ложения. В.ажность эт.их компоне.нтов кратко р.ассматриваетс.я в дальне.йшем.
Практически дост.ижимая точ.ность DPO в пре.дставленно.й здесь систе.ме составл.яет от 1 до 4 с.м при пози.ционирован.ии и 610 у.гловых секу.нд при орие.нтации при ус.ловии благо.приятного соз.вездия GPS и отсутст.вия значительных потер.ь захвата. Пос.кольку рассто.яние до объе.кта очень корот.кое (в око.нчательной а.ппаратной ре.ализации о.но будет о.коло 2 м), воз.можные неточ.ности в уг.ловых смеще.ниях при в.изировании не до.лжны влият.ь на оконч.ательные коор.динаты, да.же если он.и достигают 1 у.гловой минут.ы или более. О.днако погре.шности лине.йного смеще.ния будут не.посредстве.нно влиять н.а точность коор.динат точе.к земной по.верхности; те.м не менее, пр.актически дост.ижимая точ.ность нахо.дится на уро.вне сантиметро.в при налич.ии специал.ьного диап.азона.
Естественно, л.юбая ошибк.а в IO будет н.апрямую вл.иять на коор.динаты точе.к земной по.верхности, о.днако опыт к.алибровки [67], показал, что все ко.мпоненты, в.ключая пар.аметры рад.иального ис.кажения, мо.гут быть о.пределены с в.ысокой точ.ностью на с.пециализиро.ванном пол.игоне, а ост.аточная по.грешность к.алибровки не до.лжна превы.шать субпи.ксельный уро.вень. При р.асстоянии до объе.кта 2 метр.а и размере п.икселя 9 µ (что соот.ветствует р.азмеру пиксе.ля 2 мм на зе.мле, если ис.пользуется объе.ктив 10 мм) эффе.ктами ошибо.к калибров.ки можно пре.небречь. Точ.но так же о.шибка, связ.анная с про.цедурой авто.матического в.ыделения гр.аниц, может дост.игать неско.льких пиксе.лей, в зав.исимости от т.ипа используе.мого алгор.итма. Одна.ко, в предст.авленном з.десь сценар.ии даже ош.ибка в 5 п.икселей вызо.вет ошибку то.лько в 1 с.м на земле. Т.аким образо.м, в обсто.ятельствах, о.писанных в.ыше, основ.ным компоне.нтом, способст.вующим погре.шности назе.мных коорд.инат, являетс.я уровень точ.ности DPO (.при услови.и, что ком.поненты ка.либровки не из.меняются во вре.мя работ по к.артографиро.ванию, что я.вляется оче.нь вероятн.ым сценарие.м, посколь.ку наземные пр.иложения про.ще контрол.ировать, че.м воздушные).
Еще одна проб.лема, связ.анная с гео.метрией изобр.ажений, по.лученных о.дной камеро.й, где стереозре.ние достиг.ается за счет д.вижения пл.атформы, — это от.ношение баз.иса к глуб.ине (показ.атель съём.ки). В наше.м случае, пре.дполагая с.корость око.ло 60 км / с и ч.астоту сбор.а изображе.ний 15 Гц, б.азис будет б.лизок к метру. Т.аким образо.м, эффекти.вное соотно.шение базис / глубина сост.авляет при.мерно 1: 2, что обес.печивает вес.ьма благопр.иятные усло.вия. Экспер.именты пок.азали, что ПЗС-.датчик раз.мером 1K н.а 1K с приб.лизительно 2-.метрового б.азиса обес.печивает точ.ность пози.ционирован.ия лучше 3 с.м для рассто.яний до объе.ктов 5 м (соот.ношение 1: 2,5) и у.величиваетс.я до 15 см д.ля 25 м (соот.ношение 1: 1.2,5), соот.ветственно.
Результаты ис.пытаний, пре.дставленные в до.кументе [67], показыва.ют, что инте.грированна.я наземная с.истема, по.ддерживаем.ая бесплатфор.менной INS от сре.днего до в.ысокого качест.ва и двухч.астотным д.ифференциа.льным GPS, пре.длагает воз.можность а.втоматичес.кой и прямо.й ориентац.ии датчика с в.ысокой точ.ностью, пре.длагая вар.ианты изобр.ажения, бл.изкого к ре.альному вре.мени, пред.варительна.я обработк.а. Решающи.ми фактора.ми, огранич.ивающими к.ачество DPO, я.вляются точ.ность и ст.абильность к.алибровки му.льтисенсор.ной систем.ы и IO камер.ы. Точное и не.изменное преобр.азование в.изирования, точ.ная синхро.низация вре.мени и точ.ная оценка п.араметров в.вода-вывод.а являются н.аиболее ва.жными компо.нентами ка.либровки, в.лияющими н.а общую точ.ность DPO и коор.динат простр.анства объе.кта. Любая о.шибка во в.воде-выводе н.апрямую по.влияет на н.аземные коор.динаты, пос.кольку DPO не обес.печивает ко.мпенсацию о.шибочного и.ли неточно.го ввода-в.ывода, в от.личие от н.астройки п.акета. С это.й точки зре.ния интегр.ация GPS / I.NS в комби.нированный AT мо.жет обеспеч.ить лучшее и н.аиболее на.дежное реше.ние, поско.льку калибро.вка камеры (с.амокалибро.вка) может б.ыть частью ко.мбинирован.ной настро.йки. Поско.льку GPS / I.NS обеспеч.ивает высо.кокачестве.нную инфор.мацию о место.положении, про.цесс AT, в пр.инципе, потребует гор.аздо меньше с.вязующих точе.к, чем AT без G.PS / INS, д.ля коррект.ировки IO и в.нешнего ор.иентирован.ия [67]. Более то.го, такая ко.мбинирован.ная процедур.а позволил.а бы провест.и независи.мую оценку в.изирования н.а основе д.анных изобр.ажения, собр.анных во вре.мя фактичес.кого иссле.дования. Эт.и проблемы бо.лее актуал.ьны для борто.вых систем, г.де расстоя.ние до объе.кта намного бо.льше, чем у н.аземной систе.мы, где GP.S / INS с т.щательно от.калиброван.ной камеро.й и опорой / р.ычагом способ.ны обеспечить в.ысокую точ.ность и на.дежность D.PO (на одно.й с другой сторо.ны, это бо.лее контро.лируемая сре.да, с друго.й стороны, мо.жет произо.йти больше потер.ь GPS при з.ахвате, че.м в случае с воз.душным суд.ном). Тем не ме.нее, провер.ка на соот.ветствие н.аземной ист.ине должна вре.мя от време.ни проводит.ься также и д.ля наземны.х систем, чтоб.ы гарантиро.вать отсутст.вие измене.ний в компо.нентах кал.ибровки / ко.нфигурации с.истемы, котор.ые могут по.влиять на о.ценки DPO [67].
1.6 Исследования китайских специалистов
Китайские специалист.ы в статье [57] продемонстрировали р.азработку фотограмметр.ической пл.атформы с пр.ямой геогр.афической пр.ивязкой дл.я БПЛА для бес.платных пр.иложений с н.аземной точ.ки управле.ния.
Для облегче.ния таких пр.иложений, к.ак обнаруже.ние окружа.ющей среды и.ли монитор.инг стихий.ных бедств.ий, очень в.ажна разработ.ка быстрых не.дорогих систе.м для сбор.а пространст.венной инфор.мации, близ.кой к реал.ьному време.ни. Быстры.й сбор простр.анственной и.нформации ст.ал новой те.нденцией д.ля приложе.ний дистан.ционного зо.ндирования и к.артографии. В это.м исследов.ании [57] разрабаты.вается и о.ценивается п.латформа сбор.а пространст.венной инфор.мации на б.азе беспилот.ных летате.льных аппар.атов (БПЛА), котор.ая может р.аботать в ус.ловиях, свобо.дных от назе.мных контро.льных точе.к (GCP). Пре.длагаемая фото.грамметричес.кая платфор.ма на осно.ве БПЛА имеет мо.дуль прямо.й географичес.кой привяз.ки (DG), котор.ый включает не.дорогую инте.грированну.ю систему и.нерциально.й навигацио.нной систе.мы (INS) / г.лобальной с.истемы поз.иционирова.ния (GPS) н.а базе микро э.лектромеха.нических с.истем (MEM.S). Модуль DG мо.жет обеспеч.ивать измере.ния фазы о.дночастотно.й несущей G.PS для диффере.нциальной обр.аботки для по.лучения дост.аточной точ.ности пози.ционирован.ия. Выполне.ны все необ.ходимые про.цедуры кал.ибровки. В ито.ге выполняетс.я летное ис.пытание дл.я проверки точ.ности пози.ционирован.ия в режиме DG без использования о.порных точе.к. Предвар.ительные резу.льтаты точ.ности пози.ционирован.ия в режиме DG по.казывают [57], что точност.ь горизонт.ального поз.иционирова.ния по ося.м x и y сост.авляет око.ло 5 м на в.ысоте полет.а 300 м на.д землей. Точ.ность пози.ционирован.ия по оси z н.иже 10 м. Т.аким образо.м, предлаг.аемая платфор.ма относите.льно безоп.асна и недоро.га для сбор.а критичес.ки важной простр.анственной и.нформации д.ля срочного ре.агирования, т.акой как пр.иложения д.ля оказани.я помощи пр.и бедствия.х и оценки, ко.гда GCP не.доступны [57].
В связи с у.величением ч.исла бедст.вий из-за из.менения кл.имата разр.аботка быстро р.азвертывае.мой и недоро.гой систем.ы для сбор.а пространст.венной инфор.мации, близ.кой к реал.ьному време.ни, стала оче.нь важной. С.ледователь.но, возмож.ность быстро.го получен.ия простра.нственной и.нформации ст.ала новой те.нденцией д.ля приложе.ний дистан.ционного зо.ндирования и к.артографии. Д.истанционное зо.ндирование с воз.духа, а точ.нее аэрофото.грамметрия, в к.лассическо.й форме пле.ночных опт.ических датч.иков (анало.говых) широ.ко используетс.я для высо.коточных к.артографичес.ких приложе.ний во все.х масштаба.х и быстро.го сбора простр.анственной и.нформации н.а протяжен.ии десятилет.ий. В после.днее время н.а смену пле.ночным опт.ическим се.нсорам (ан.алоговым) пр.ишли цифро.вые сенсор.ы изображе.ния [57].
Как правило, тр.адиционные мето.ды фотогра.мметрии ос.нованы на о.порных точ.ках. Несмотр.я на то, что фото.грамметрия ис.пользует ц.ифровую те.хнологию, о.порные точ.ки обычно сч.итаются ед.инственным источ.ником наде.жной геогр.афической и.нформации. Не.давно техно.логия DG ст.ала возмож.ной благод.аря интегр.ации GPS и I.NS, что сде.лало параметр.ы внешнего ор.иентирован.ия доступн.ыми с дост.аточной точ.ностью в л.юбой момент вре.мени [57]. Интеграц.ия INS / G.PS улучшает гео.графическу.ю привязку фото.грамметричес.ких данных и ос.вобождает и.х от эксплу.атационных о.граничений. В.месте с цифро.вой запись.ю и обработ.кой данных о.н позволяет соз.давать мно.госенсорные с.истемы. Опер.ационная г.ибкость зн.ачительно по.вышается во все.х случаях, ко.гда блочна.я структур.а не требуетс.я [56]. Затр.аты значительно с.нижаются, особе.нно в област.ях, где назе.мное управ.ление практ.ически отсутст.вует. Дост.игаемая в н.астоящее вре.мя точност.ь коммерчес.ких систем DG дост.аточна для м.ногих карто.графически.х приложен.ий. Стоимост.ь и эффект.ивность про.изводства з.начительно у.лучшились с ис.пользование.м фотограм.метрически.х платформ н.а основе DG [57].
Однако, су.ществуют не.которые огр.аничения д.ля текущих фото.грамметричес.ких платфор.м на основе DG. Сто.имость аре.нды самолет.а для прове.дения аэрофото.грамметрии в.ысока, и в бо.льшинстве стр.ан существу.ют строгие пр.авила и сло.жные проце.дуры для по.лучения разре.шения на в.ыполнение п.лана полет.а. Кроме то.го, гибкост.ь и возмож.ности прове.дения обсле.дований ма.лых территор.ий или быстро.го сбора простр.анственной и.нформации вес.ьма ограниче.ны. Следов.ательно, д.ля срочного ре.агирования, т.акого как о.казание по.мощи при бе.дствиях и о.ценка, необ.ходима борто.вая платфор.ма на осно.ве DG, котор.ая относите.льно свобо.дна от пра.вительстве.нных поста.новлений и от.носительно не.дорога, но по.ддерживает в.ысокую моб.ильность д.ля исследо.ваний небо.льших терр.иторий или б.ыстрого по.лучения простр.анственной и.нформации. С дру.гой сторон.ы, интегриро.ванная орие.нтация датч.ика (ISO), сочет.ающая преи.мущества DG и пр.ямой простр.анственной пр.ивязки с тр.адиционной ре.гулировкой с.вязки с ис.пользование.м процесса Ae.rial Triangu.lar (AT), мо.жет считат.ься практич.ным и наде.жным процессо.м для совре.менных при.ложений аэрофото.грамметрии, ко.гда изобра.жения получе.ны в блоке с дост.аточным пере.крытием [57]. При испо.льзовании п.араметров в.нешней орие.нтации (EO.P), предост.авляемых с.истемами DG в к.ачестве нач.ального пр.иближения д.ля ориентиро.вания связ.ки, требуетс.я только о.граниченное ко.личество с.вязующих точе.к в област.и перекрыт.ия. Опорные точ.ки применя.ются для ко.нтроля эле.ментов внутре.ннего орие.нтирования и ко.мпенсации ост.аточных систе.матических о.шибок диффере.нциальной G.PS. Вообще го.воря, его пре.имущества в.ключают в себ.я сочетание пре.имуществ DG и тр.адиционного про.цесса AT, а т.акже возмо.жность испо.льзования ме.нее точного и.нерциально.го измерите.льного бло.ка (IMU) [57], однако, его ос.новным огр.аничением д.ля приложе.ний, связа.нных с поте.нциальными бе.дствиями, я.вляется требо.вание блок.а изображе.ний, котор.ые не всег.да могут б.ыть доступ.ны в случа.ях оказани.я помощи пр.и бедствия.х.
В исследов.ании [57] разрабаты.вается фото.грамметричес.кая платфор.ма БПЛА на ос.нове DG, в которо.й реализов.ана интегр.ированная PO.S-система I.NS / GPS д.ля обеспече.ния возмож.ности DG п.латформы. Про.верка хара.ктеристик по.казывает, что пре.длагаемая п.латформа мо.жет успешно де.лать аэрофотос.нимки. Пре.дварительн.ые результ.аты показы.вают [57], что точност.ь горизонт.ального поз.иционирова.ния DG по ос.ям x и y сост.авляет око.ло 5 м при в.ысоте полет.а 300 м. Точ.ность пози.ционирован.ия по оси z ме.нее 10 м. Т.акая точност.ь хороша д.ля оказани.я помощи пр.и бедствия.х почти в ре.альном вре.мени. Функ.ция DG Ready предла.гаемой платфор.мы гарантирует воз.можность к.артографиро.вания и поз.иционирова.ния даже в сре.дах без GC.P, что оче.нь важно д.ля быстрого и сроч.ного реагиро.вания при о.казании по.мощи при бе.дствиях. Вооб.ще говоря, вре.мя обработ.ки данных д.ля модуля DG, в.ключая обоб.щение реше.ния POS, и.нтерполяци.ю, создание EO.P и измере.ния характер.ных точек, сост.авляет менее о.дного часа. Кро.ме того, в бу.дущем будут про.водиться исс.ледования д.ля реализа.ции процедур.ы статичес.кой наземно.й калибров.ки с целью по.вышения точ.ности пози.ционирован.ия DG пред.лагаемой п.латформы. Бу.дет разработ.ан одноэта.пный подхо.д, чтобы г.арантироват.ь точную к.алибровку, а т.акже будет исс.ледована тес.но связанн.ая интегриро.ванная схе.ма на осно.ве кластер.а, чтобы г.арантироват.ь стабильност.ь POS-реше.ний для пр.актических пр.иложений без о.порных точе.к [57].
Исследователи из Китая в работе [106] проанализ.ировали вл.ияние точност.и определе.ния ЭВО систе.мами позиц.ионировани.я и ориент.ации на по.перечный п.араллакс в фото.грамметричес.ких построе.ниях.
В этой стат.ье анализируетс.я влияние э.лементов в.нешнего ор.иентирован.ия на попереч.ный паралл.акс, особе.нно с испо.льзованием п.араметров ор.иентации аэрофотос.нимков, по.лученных с по.мощью POS (с.истемы поз.иционирования и ор.иентации) пос.ле калибро.вки. Во-пер.вых, на ос.нове теори.и аналитичес.кого взаим.ного ориент.ирования э.лементы вне.шнего орие.нтирования мо.гут быть ле.гко преобр.азованы в э.лементы вз.аимного ор.иентирован.ия. Затем мо.жно вывест.и формулу по.перечного п.араллакса. З.начения по.перечного п.араллакса в с.истеме коор.динат простр.анства лево.го изображе.ния сравни.ваются со з.начениями, в.ычисленным.и в системе коор.динат изобр.ажения, котор.ые паралле.льны резул.ьтатам систе.мы координ.ат объекта. Досто.верность и осу.ществимост.ь математичес.кой модели про.веряется с ис.пользование.м двух наборо.в фактичес.ких данных в р.азных масшт.абах изобр.ажений. На.конец, раз.личия между в.лияниями п.араметров в.нешнего ор.иентирован.ия на попереч.ный паралл.акс сравни.ваются с ис.пользование.м параметро.в внешнего ор.иентирован.ия, получе.нными с по.мощью трад.иционной фототр.иангуляции, и с по.мощью POS пос.ле калибро.вки. И про.анализиров.ано, как к.аждый элеме.нт внешнего ор.иентирован.ия влияет н.а поперечн.ый паралла.кс, и как о.ни работают в.месте.
Эмпирические резу.льтаты пок.азывают, что в.лияние раз.личных эле.ментов вне.шнего орие.нтирования н.а поперечн.ый паралла.кс различно, все э.лементы вне.шнего орие.нтирования мо.гут влиять дру.г на друга, поэто.му общий эффе.кт точност.и поперечно.го паралла.кса может б.ыть ограниче.н всеми эле.ментами вне.шнего орие.нтирования.
Таким обр.азом, при ис.пользовани.и известны.х элементо.в внешнего ор.иентирован.ия изображе.ний для расчет.а поперечно.го паралла.кса или восст.ановления стерео.модели для стереос.копического н.аблюдения, пр.и наличии с.истематичес.ких ошибок, со.держащихся в про.дольном уг.ле наклона и.ли в линей.ных элемент.ах внешнего ор.иентирован.ия, окончате.льные резу.льтаты не бу.дут затронут.ы. Для POS, котор.ый может обес.печивать в.нешнее орие.нтирование изобр.ажений, ес.ли все точ.ности элеме.нтов внешне.го ориентиро.вания могут дост.игать высо.кого уровн.я или продо.льный угол н.аклона и л.инейные эле.менты содер.жат только с.истематичес.кие ошибки, резу.льтаты все р.авно могут б.ыть использо.ваны для стереос.копического н.аблюдения н.апрямую. То ест.ь, даже ес.ли абсолют.ная точност.ь элементо.в внешнего ор.иентирован.ия, получе.нных с помо.щью POS, не.достаточно в.ысока, воз.можно, что п.араметры ор.иентации изобр.ажения, по.лученные с по.мощью POS, мо.жно использо.вать для стереос.копического н.аблюдения н.апрямую, но не д.ля прямой гео.графическо.й привязки.
Выводы по главе 1
Аналитический обзор исс.ледований отечест.венных и з.арубежных учё.ных и спец.иалистов по во.просам испо.льзования д.анных высо.коточных с.истем геопоз.иционирова.ния при фото.грамметричес.кой обработ.ке снимков, по.лученных с Б.ПЛА, для це.лей точного зе.мледелия поз.воляет сде.лать следу.ющие вывод.ы.
Геопозиционирование к.адровых изобр.ажений, по.лученных с Б.ПЛА, может б.ыть решено путе.м применен.ия различн.ых методов с соот.ветствующе.й точность.ю (ASPRS), э.кономическ.ими и време.нными затр.атами.
Помимо мно.жества комб.инаций опт.ических датч.иков, приё.мников GNS.S, платфор.м, подвесо.в и програ.ммного обес.печения, котор.ые можно протест.ировать, н.аиболее часто ис.пользуются чет.ыре метода гео.позициониро.вания изобр.ажений, по.лученных с Б.ПЛА, в реа.льных усло.виях эксплу.атации для це.лей дистан.ционного зо.ндирования о.кружающей сре.ды с широко ис.пользуемым.и материал.ами:
1) прямое гео.позициониро.вание с ис.пользование.м исходных борто.вых данных GNSS (GNSSNAV),
2) прямое гео.позициониро.вание с ис.пользование.м постобработ.анных кине.матических одночастотных данных GN.SS с фазой несу.щей без наземной поддержки на месте (PPK1),
3) прямое гео.позициониро.вание с ис.пользование.м постобработ.анных кине.матических двухчастотных данных GN.SS с фазой несу.щей с наземной поддержкой на месте (PPK2),
4) косвенное гео.позициониро.вание с ис.пользование.м наземных о.порных точе.к (GCP).
Решение GNSSNAV — это быстр.ый и недоро.гой вариант, котор.ый полезен д.ля получен.ия изображе.ний с БПЛА в сочет.ании с про.дуктами дист.анционного зо.ндирования, т.акими как с.путниковые д.анные Sent.inel-2.
Окончательная точность определения положения подвижного объекта (точность прямого геопозиционирования (DG) обыч.ного БПЛА) з.ависит от:
— частоты р.аботы приё.мника (Гц),
— использо.вания одноч.астотного и.ли двухчастот.ного диффере.нциального пр.иемника GN.SS (DGNSS),
— качества пр.иемника GN.SS; например, в коде погрешност.ь позицион.ирования мо.жет достиг.ать 0,77 м, а в фазе несущей L1 / L2 ошибка сост.авляет 0,01 м.
Хотя исход.ное решение д.ля прямой гео.графическо.й привязки пр.иемника GN.SS не подхо.дит для ре.гистрации д.анных БПЛА в р.азличных по.лётах, его ле.гко использо.вать, можно пр.иобрести по н.изкой цене и не требуетс.я наземная по.ддержка, что по.лезно для в.изуальных про.верок матер.иалов дист.анционного зо.ндирования с р.азмером пи.кселя не ме.нее 2 м.
Общая произ.водительност.ь метода прямого геопозиционирования ограничив.ается в пер.вую очеред.ь следующи.ми компоне.нтами:
- Качеством к.алибровки и.нтегрирова.нной систе.мы:
— Моделиро.вание датч.ика изобра.жения,
— Точность о.пределения ве.ктора между IMU и антенно.й GPS,
— Преобразо.вание визиро.вания между INS и рамкой к.амеры,
• Изменение.м калибровоч.ных компоне.нтов в полёте,
• Жёсткост.ью датчика изобр.ажения / кре.пления INS,
• Качество.м датчика I.MU,
• Непрерыв.ностью фикс.ации GPS,
• Конструк.цией фильтр.а Калмана.
В проектах э.кологическо.го и топогр.афического к.артографиро.вания обыч.но не требуетс.я географичес.кая привяз.ка методом кинематики в реальном времени (RTK). В результ.ате чего дост.игается точ.ность, почт.и аналогич.ная типово.й пространст.венной разре.шающей способ.ности оптичес.ких датчико.в, подходя.щих для ле.гкого БПЛА д.ля приложе.ния дистан.ционного зо.ндирования.
Метод PPK1, который мо.жет регистр.ировать изобр.ажения с Б.ПЛА с помо.щью продукто.в дистанцио.нного зонд.ирования с р.азмером пи.кселя до 0,.25 м, как с.путниковые изобр.ажения, по.добные Wor.ldView, борто.вые лида-р.ы или орто.изображени.я, имеет бо.лее высоку.ю экономичес.кую стоимост.ь, чем реше.ние GNSSNAV.
Метод PPK2 является пр.иемлемым в.ариантом к.ак для обр.аботки матер.иалов дист.анционного зо.ндирования с р.азмером пи.кселя от 0,05 м, т.ак и для изобр.ажений с Б.ПЛА. Более то.го, метод P.PK2 может по.лучить точ.ность, котор.ая приближ.ается к об.ычному раз.меру пиксе.ля БПЛА м (.например, со.вместная ре.гистрация р.азновремен.ных снимко.в), но это н.амного доро.же, чем PP.K1.
Косвенное геопозиционирование может обес.печить макс.имальную точ.ность. Одн.ако, это тру.доёмкая за.дача, особе.нно если необ.ходимо обес.печение бо.льшого кол.ичества назе.мных опорн.ых точек — GC.P.
Для выполне.ния косвенного геопозиционирования есть два ос.новных способ.а:
1) включен.ие не менее трё.х опорных точе.к в решение ур.авнивания по.ложения св.язок проект.ирующих луче.й, обрабат.ывая их ка.к взвешенн.ые наблюде.ния по способу н.аименьших к.вадратов. Этот по.дход являетс.я наиболее стро.гим, так к.ак:
— сводит к м.инимуму воз.можные дефор.мации блок.а изображе.ний и возмо.жные систе.матические о.шибки,
— позволяет избе.жать нестаб.ильность ре.шения (схо.димость к не.правильному ре.шению),
— помогает в о.пределении пр.авильной трё.хмерной фор.мы исследуе.мых объекто.в.
2) построе.ние свобод.ной фотогр.амметричес.кой модели д.ля определе.ния взаимно.го положен.ия снимков б.лока и при.менение то.лько в кон.це решения преобр.азования по.добия (Hel.mert), чтоб.ы привести ито.говый резу.льтат (орто.изображение) в требуе.мую систему коор.динат.
Такой подхо.д не являетс.я строгим: ре.шение ищетс.я, минимиз.ируя опреде.литель ков.ариационно.й матрицы, в.водя необхо.димые данн.ые с некотор.ыми началь.ными прибл.ижениями.
Точная син.хронизация вре.мени «на лету» — о.дна из сам.ых сложных з.адач предв.арительной обр.аботки изобр.ажений в ре.альном вре.мени.
Решающими ф.акторами, о.граничиваю.щими качест.во DPO, яв.ляются точ.ность и ст.абильность к.алибровки му.льтисенсор.ной систем.ы и IO камер.ы. Точное и не.изменное преобр.азование в.изирования, точ.ная синхро.низация вре.мени и точ.ная оценка п.араметров в.вода-вывод.а являются н.аиболее ва.жными компо.нентами ка.либровки, в.лияющими н.а общую точ.ность DPO и коор.динат в простр.анстве объе.кта. С это.й точки зре.ния интегр.ация GPS / I.NS в комби.нированную аэротр.иангуляцию (.AT) может обес.печить луч.шее и наибо.лее надёжное ре.шение, пос.кольку кал.ибровка ка.меры (само.калибровка) мо.жет быть ч.астью комб.инированно.й аэротриа.нгуляции AT.
Обработка д.анных кинематики с использованием одночастотных фазовых GNSS-приемников и корре.ктировкой G.NSS сигнал.а с использо.ванием инфор.мации от посто.янной базо.вой станци.и, располо.женной до 20 к.м, позволяет дост.игать точност.и регистра.ции ЭВО бес.пилотных изобр.ажений с борто.выми лидар.ами или орто.изображени.ями, соответст.вующей разре.шению на мест.ности от 25 с.м.
Решение с постобработкой кинематики, использующее двухчастотный фазовый приемник GNSS и корректирующий сигнал GNSS с помощью информ.ации от базо.вой станци.и, располо.женной в р.айоне иссле.дования, дост.игает точност.и регистра.ции ЭВО изобр.ажений с Б.ПЛА с общи.м пространст.венным разре.шением от 5 с.м.
Однако, за.коны логист.ики требуют гео.графическо.й привязки по о.порным точ.кам, при это.м стоимост.ь получаемо.й продукци.и возрастает.
Обычное косвенное геопозиционирование с использо.ванием назе.мных опорн.ых точек я.вляется на.иболее точ.ным решение.м в сравне.нии с любы.м другим мето.дом геопоз.иционирова.ния матери.алов диста.нционного зо.ндирования. О.днако, это т.акже требует и.нтенсивной н.аземной по.ддержки на месте и требует гор.аздо больше вре.мени.
Вот почему пос.ледние науч.ные исследо.вания сосре.доточились н.а использо.вании мето.дов аэрофото.грамметрии д.ля материа.лов с БПЛА с це.лью устране.ния необхо.димости в н.аземных опор.ных точках (GC.P). При вс.помогатель.ной аэротр.иангуляции (.ААТ) назем.ная опора з.аменяется воз.душной опоро.й: приемни.к GNSS гео.дезического уро.вня может обес.печивать о.пределение по.ложения ка.ждой камер.ы с точност.ью до сант.иметра при ус.ловии, что б.азовая ста.нция и ровер со.вместно ис.пользуют с.путниковые д.анные в соот.ветствующе.й геометричес.кой конфигур.ации.
Эта методи.ка очень по.пулярна в н.астоящее вре.мя в сочет.ании с кине.матикой в ре.альном вре.мени (RTK) и постобр.аботкой ки.нематики (.PPK) для гео.позициониро.вания матер.иалов с БП.ЛА. Более то.го, GNSS-пр.иёмники необ.ходимого уро.вня теперь досту.пны для ис.пользовани.я в компле.кте с фото.грамметричес.кой камеро.й senseFly SODA 3D и програм.мным обеспече.нием МAVinc.i Desktop. Профессиональная фото.грамметричес.кая камера senseFly SODA 3D для дроно.в, которая ме.няет ориент.ацию во вре.мя полёта, чтоб.ы каждый р.аз получат.ь три изобр.ажения (2 н.аклонных, 1 н.адирное) в.место одно.го, что обес.печивает гор.аздо более ш.ирокое поле зре.ния.
Программное обес.печение MAV.inci Desktop — и.нструмент д.ля аэрофотосъё.мки — для п.ланировани.я и оптимиз.ации полёт.а БПЛА с воз.можностью из.менения курс.а до или во вре.мя полёта.
Рассмотренные в а.налитическо.м отчёте э.ксперимент.альные исс.ледования пр.и применен.ии метода RTK показали де.циметровую точ.ность пози.ционирован.ия. Высока.я точность б.ыла отмече.на (сантиметр.ы) при испо.льзовании метода косвенного геопозиционирования – с испол.ьзованием д.ля географ.ической пр.ивязки опор.ных точек. Те.м не менее, пр.именение мето.да RTK может б.ыть эффект.ивным для мето.да прямого гео.позициониро.вания при соз.дании ортофото.планов для се.льского хоз.яйства. Пр.и этом по соз.данным цифро.вым ортофото.планам могут в.ыполняться т.акие автоно.мные задач.и точного зе.мледелия к.ак орошение, точ.ное внесен.ие удобрен.ий и борьб.а с вредите.лями, процесс с.нижения не.гативного воз.действия н.а окружающу.ю среду.
Глава 2. Экспериментальные исследования применения снимков, полученных с БПЛА, для точного земледелия
Разработка методики экспериментальных исследований
Методика э.ксперимент.альных исс.ледований пре.дполагает ор.ганизацию и про.ведение науч.ных теорет.ических и э.ксперимент.альных исс.ледований, н.аправленны.х на изуче.ние оптима.льного испо.льзования м.атериалов, по.лученных съё.мочными систе.мами, уста.новленных н.а гражданс.ких беспилот.ных летате.льных аппар.атах (БПЛА).
Цель исследования заключается в изучении в.лияния раз.личных факторо.в для повы.шения точност.и и достовер.ности опре.деления простр.анственного по.ложения поч.венных контуро.в посредст.вом создан.ия цифрово.й модели по.верхности и ц.ифровой мо.дели рельеф.а по снимк.ам, получе.нным с бес.пилотных лет.ательных а.ппаратов, д.ля последу.ющего испо.льзования в «точ.ном земледе.лии».
Последовательность этапов методики исследований
Схема техно.логических эт.апов метод.ики проведе.ния теорет.ических и э.ксперимент.альных исс.ледований по ре.шению пост.авленных це.лей предст.авлена на р.исунке 25.
2.1 Задачи исследования с указанием заданных точностных характеристик выходной продукции
Первостепенным ус.ловием разр.аботки мето.дики иссле.дования яв.ляется разр.аботка тех.нического з.адания с у.казанием з.адачи иссле.дования и з.аданных точ.ностных хар.актеристик в.ыходной про.дукции.
В данной р.аботе выхо.дная проду.кция — это ц.ифровые мо.дели земно.й поверхност.и и цифров.ые модели ре.льефа объе.ктов недви.жимости, ис.пользуемые в «точ.ном земледе.лии», созд.аваемые по аэрос.нимкам, по.лученным с БПЛА, а та.кже ортофото.планы,
Рисунок 25 — С.хема этапо.в методики э.ксперимент.альных исс.ледований
испо.льзуемые в к.ачестве карто.графическо.й продукци.и.
Оперативным с.пособом по.лучения акту.альной и досто.верной граф.ической инфор.мации о место.положении гр.аниц земел.ьных участ.ков являетс.я аэрофотосъе.мка территор.ии с беспи.лотного лет.ательного а.ппарата. Сро.ки выполне.ния аэрофотосъе.мки и изгото.вления цифро.вых ортофото.планов зав.исят от пло.щади территор.ии съёмки, необ.ходимого к.ачества сн.имков, пер.иода выпол.нения работ, по.годных усло.вий и сост.авляют пор.ядка одного мес.яца. В соот.ветствии с Фе.деральными пр.авилами ис.пользовани.я воздушного простр.анства Росс.ийской Федер.ации, утвер.жденными Пост.ановлением Пр.авительств.а Российско.й Федераци.и от 11 март.а 2010 г. № 1.38, беспилот.ный летате.льный аппар.ат (БПЛА) – это лет.ательный а.ппарат, вы.полняющий по.лет без пи.лота (экип.ажа) на борту и у.правляемый в по.лете автом.атически о.ператором с пу.нкта управ.ления или сочет.анием указ.анных способо.в. Одним из н.азначений пр.именения Б.ПЛА для гр.ажданских це.лей являетс.я аэрофотосъе.мка с после.дующим карто.графирован.ием местност.и. Аэрофотосъе.мка с приме.нением бес.пилотных лет.ательных а.ппаратов поз.воляет получ.ать операт.ивные данн.ые в виде с.нимков с в.ысоким разре.шением при о.птимальной сто.имости затр.ат, что де.лает ее качест.венной и э.кономичной а.льтернативо.й традицио.нным способ.ам аэрокарто.графирован.ия.
Главной за.дачей данн.ых исследо.ваний являетс.я изучение в.лияния раз.личных факторо.в на построе.ние цифров.ых моделей по.верхности, ре.льефа и цифро.вых ортофото.планов земе.льных участ.ков (почве.нных контуро.в) по матер.иалам, получе.нным с БПЛ.А с последу.ющей оценко.й точности.
При межева.нии земель, от.несенных к зе.млям сельс.кохозяйстве.нного назн.ачения, сре.дняя квадр.атическая по.грешность место.положения х.арактерных точе.к, согласно нор.мативным до.кументам, до.лжна быть не бо.лее 2,50 м.
2.2 Выбор территории и создание тестового полигона
В качестве тесто.вого полиго.на [22] использов.алась терр.итория науч.но-учебной б.азы «Горное» Госу.дарственно.го универс.итета по зе.млеустройст.ву в Зарайс.ком районе Мос.ковской об.ласти. Общ.ая площадь по.лигона, пре.дназначенно.го для аэросъё.мочных работ, сост.авляет пор.ядка 100 к.м2. Площадь уч.астка, испо.льзуемого д.ля аэрофотосъё.мки в целя.х разработ.ки методик.и исследов.ания приме.нения комп.лексов бес.пилотных лет.ательных а.ппаратов д.ля оценки точ.ности цифро.вых модели по.верхности и ц.ифровых мо.делей рельеф.а, используе.мых в «точ.ном земледе.лии», огра.ничена 10 к.м2. Местност.ь со значите.льным рельефо.м – перепа.д высот дост.игает 60 м, с р.азвитой овр.ажной систе.мой. Достаточ.но большая п.лощадь покр.ыта древес.ной растительностью. Г.идрографичес.кие объект.ы: река Осётр, от.метка орди.нара соста.вляет 40 м. Н.а участке р.асположены 34 гео.дезических тр.игонометричес.ких пункта с о.копкой, коор.динаты котор.ых получен.ы в условно.й системе коор.динат мето.дом полиго.нометрии 2 к.ласса. Так.же имеются вре.менные пун.кты (чёткие э.лементы мест.ности), коор.динаты котор.ых определе.ны ранее мето.дом сгущен.ия геодезичес.кой сети.
Вторым участ.ком для экс.периментал.ьных работ в.ыбрана терр.итория садо.водческого посё.лка Тетище.во Дмитровского р.айона Моско.вской област.и. Рельеф р.авнинный. В к.ачестве инфор.мационной б.азы для оце.нки точност.и создавае.мого ортофото.плана испо.льзовалась Пуб.личная кад.астровая к.арта.
2.3 Выбор технических средств для аэрофотосъёмочных работ с БПЛА
2.3.1. Классификация беспилотных летательных аппаратов
Беспилотный лет.ательный а.ппарат (БП.ЛА) — летате.льный аппар.ат, выполн.яющий полет без п.илота (эки.пажа) на борту и у.правляемый в по.лете автом.атически о.ператором с пу.нкта управ.ления или сочет.анием указ.анных способо.в. Понятие лет.ательный а.ппарат вкл.ючает в себ.я большое ч.исло типов, у к.аждого из котор.ых есть сво.й беспилот.ный аналог.
Таблица 5 — Типы беспилотных лет.ательных а.ппаратов
| Аэростатические | Аэродинамические | Реактивные | |||
| Гибкое кры.ло | Фиксированное кр.ыло | Вращающееся кр.ыло | |||
| Безмоторные | Аэростаты | Воздушные з.меи и анало.ги безмотор.ных аппарато.в сверхлёг.кой авиаци.и (парапла.ны, дельта.планы и др.) | Планеры | ||
| Моторные | Дирижабли | Аналоги мотор.ных аппарато.в сверхлёг.кой авиаци.и (парапла.ны, дельта.планы и др.) | БПЛА самолёт.ного типа | БПЛА верто.лётного ти.па | Космические ре.активные а.ппараты |
В данных э.ксперимент.ах под опре.деление БП.ЛА попадает бо.лее узкое по.нятие. А и.менно: лет.ательный а.ппарат без э.кипажа на борту, ис.пользующий аэро.динамическ.ий принцип соз.дания подъё.мной силы с по.мощью фикс.ированного и.ли вращающе.гося крыла (.БПЛА самолёт.ного и верто.лётного ти.па), оснащё.нный двигате.лем и имею.щий полезну.ю нагрузку и про.должительност.ь полёта, дост.аточные дл.я выполнен.ия специал.ьных задач. Д.ля выполне.ния различ.ных специа.лизированн.ых задач, в то.м числе аэрофотосъё.мки, беспи.лотный лет.ательный а.ппарат дол.жен рассматр.иваться в со.вокупности с е.го приборн.ым оснащен.ием и полез.ной нагруз.кой, для че.го введён тер.мин беспилот.ная авиацио.нная систе.ма (БАС).
БАС, помимо Б.ПЛА, состо.ит из борто.вого компле.кса управле.ния, полез.ной нагруз.ки и назем.ной станци.и управлен.ия.
- Бортовой ко.мплекс:
Интегриро.ванная нав.игационная с.истема;
Приёмник с.путниковой н.авигационно.й системы;
- Автопилот.
Задачи авто.пилота:
пилотиров.ание;
автоматичес.кий полёт по з.аданному м.аршруту;
автоматичес.кий взлёт и з.аход на пос.адку;
поддержан.ие заданно.й высоты и с.корости по.лёта, стаб.илизация у.глов ориент.ации;
принудите.льная поса.дка в случ.ае отказа д.вигателя и.ли прочих сер.ьёзных непо.ладок;
программное у.правление борто.выми систе.мами и полез.ной нагруз.кой, напри.мер, стаби.лизация ви.деокамеры и с.инхронизац.ия по време.ни и коорд.инатам сраб.атывания з.атвора фото.аппарата, в.ыпуск пара.шюта;
накопител.ь полётной и.нформации.
Одной из в.ажнейших те.хнических х.арактерист.ик БПЛА яв.ляется способ у.правления Б.ПЛА. Сущест.вуют следу.ющие способ.ы управлен.ия БПЛА:
— Ручное у.правление о.ператором (.или дистан.ционное пи.лотирование Б.ПЛА) с дист.анционного пу.льта управ.ления в пре.делах оптичес.кой наблюд.аемости ил.и по видово.й информац.ии, поступ.ающей с ви.деокамеры пере.днего обзор.а. При тако.м управлен.ии оператор пре.жде всего ре.шает задачу п.илотирован.ия — поддер.жание нужно.го курса, в.ысоты и т. д.
— Автоматичес.кое управле.ние обеспеч.ивает возмо.жность пол.ностью авто.номного по.лёта БПЛА по з.аданной тр.аектории н.а заданной в.ысоте с за.данной скорост.ью и со ст.абилизацие.й углов ор.иентации. А.втоматичес.кое управле.ние осущест.вляется с по.мощью борто.вых програ.ммных устро.йств.
— Полуавто.матическое у.правление (.или дистан.ционное упр.авление) — по.лёт осущест.вляется авто.матически без в.мешательст.ва человек.а с помощь.ю автопилот.а по перво.начально з.аданным пар.аметрам, но пр.и этом опер.атор может в.носить изме.нения в мар.шрут в интер.активном ре.жиме. Таки.м образом, о.ператор имеет воз.можность в.лиять на резу.льтат функ.ционирован.ия, не отв.лекаясь на з.адачи пилот.ирования. Руч.ное управле.ние может б.ыть одним из ре.жимов для Б.ПЛА, а может б.ыть единст.венным способо.м управлен.ия. БПЛА, л.ишённые ка.ких-либо сре.дств автом.атического у.правления по.лётом — ра.диоуправляе.мые авиамо.дели — не мо.гут рассматр.иваться в к.ачестве пл.атформы дл.я выполнен.ия серьёзн.ых целевых з.адач.
Последние д.ва способа в н.астоящее вре.мя являютс.я наиболее востребо.ванными бес.пилотными с.истемами, т. к. пре.дъявляют н.аименьшие требо.вания к по.дготовке персо.нала и обес.печивают безо.пасную и эффе.ктивную экс.плуатацию с.истем бесп.илотных лет.ательных а.ппаратов. По.лностью авто.матическое у.правление мо.жет быть о.птимальным ре.шением для з.адач аэрофотосъё.мки заданно.го участка, ко.гда нужно с.нимать на бо.льшом удале.нии от мест.а базирова.ния вне ко.нтакта с н.аземной ст.анцией. В то же вре.мя, поскол.ьку за полёт от.вечает опер.атор, осущест.вляющий за.пуск, то воз.можность влият.ь на полёт с н.аземной ст.анции может по.мочь избеж.ать внештат.ных ситуац.ий.
Съёмка небо.льших объе.ктов и мал.ых по площ.ади территор.ий рентабе.льна при ис.пользовани.и БПЛА. В это.м случае э.кономическ.ие и време.нные затрат.ы на орган.изацию работ, пр.иходящиеся н.а единицу отс.нятой площ.ади, сущест.венно превос.ходят анало.гичные пок.азатели тр.адиционной аэрофотосъё.мки. В насто.ящее время те.хнология аэрофотосъё.мки с БПЛА в з.начительно.й степени отр.аботана.
Функции н.аземного пу.нкта управ.ления:
слежение з.а полётом;
приём дан.ных;
передача ко.манд управ.ления.
Типовой ал.горитм полёт.а БПЛА зак.лючается в пос.ледователь.ном выполне.нии следую.щих этапов: в.ылет в зад.анный райо.н, выполне.ние полета по з.аложенной и.ли изменяе.мой в интер.активном ре.жиме прогр.амме, возвр.ащение к месту пос.адки (как пр.авило, к н.аземному пу.нкту управ.ления). В про.цессе полёт.а в заданно.м районе Б.ПЛА по рад.иоканалу (.в зоне рад.иовидимост.и и/или через кос.мический/а.виационный ретр.анслятор) пере.даёт инфор.мацию о мест.ности на н.аземный пу.нкт управле.ния в реал.ьном време.ни. Оператор Б.ПЛА, наход.ясь на назе.мном пункте у.правления, о.ценивает посту.пающую инфор.мацию и по ко.мандному р.адиоканалу у.правляет с.амим БПЛА, в.ключая воз.можность м.ногократны.х повторны.х заходов Б.ПЛА на отде.льные объе.кты съёмки. Це.лью управле.ния БПЛА я.вляется про.цесс получе.ния максим.альной инфор.мации об объе.ктах местност.и. Исходя из в.ышесказанно.го, можно сфор.мулировать р.яд признако.в для опре.деления аэрофотосъё.мочных БПЛ.А, применяе.мых в целя.х монитори.нга объекто.в недвижимост.и:
1. Тип констру.кции — БПЛ.А самолётно.го или верто.лётного ти.па.
2. Способ у.правления: а.втоматичес.кий или по.луавтоматичес.кий.
3. БПЛА дл.я аэрофотосъё.мки в целя.х картограф.ирования до.лжен иметь н.а своем борту по.лноценный а.втопилот, с.пособный в.ыдерживать п.араметры съёмки (мар.шрут, углы н.аклона фото.аппарата, про.цент продо.льного и по.перечного пере.крытия, высоту и т. д.) д.аже при ма.лой массе а.ппарата в ш.ироком диа.пазоне метеоус.ловий.
Полезная н.агрузка: к.алиброванн.ая цифрова.я автоматичес.кая фотока.мера (возмо.жно в качест.ве дополне.ния видеок.амера, теп.ловизор и И.К-камера).
Для монитор.инга объекто.в недвижимост.и, требующ.их высокоточ.ное опреде.ление коор.динат поворот.ных точек гр.аниц, испо.льзуют моде.ли, летающ.ие на малы.х высотах (.в классе воз.душного простр.анства с в.ысотой до 4,5 к.м в ненасе.лённых терр.иториях, в пре.делах котор.ых планируетс.я ввести у.ведомитель.ный порядо.к полётов бес.пилотной а.виации).
4. Коммерчес.ки доступн.ые — выдер.жавшие экс.периментал.ьные полёт.ы и поступ.ившие в сер.ийное произ.водство.
При выборе те.хнических х.арактерист.ик БПЛА необ.ходимо учит.ывать его усто.йчивость в по.лёте, возмо.жность получе.ния углово.го смаза изобр.ажения, а т.акже обеспече.ние необхо.димых пере.крытий аэрофотос.нимков. В к.ачестве пр.имера в таблица.х 6 и 7 пр.иведены те.хнологичес.кие характер.истики апп.аратно-про.граммных ко.мплексов Г.ЕОСКАН 101 и Г.ЕОСКАН 201.
Таблица 6 — Резу.льтаты опре.деления метро.логических х.арактерист.ик для апп.аратно-про.граммного ко.мплекса ГЕОС.КАН 101
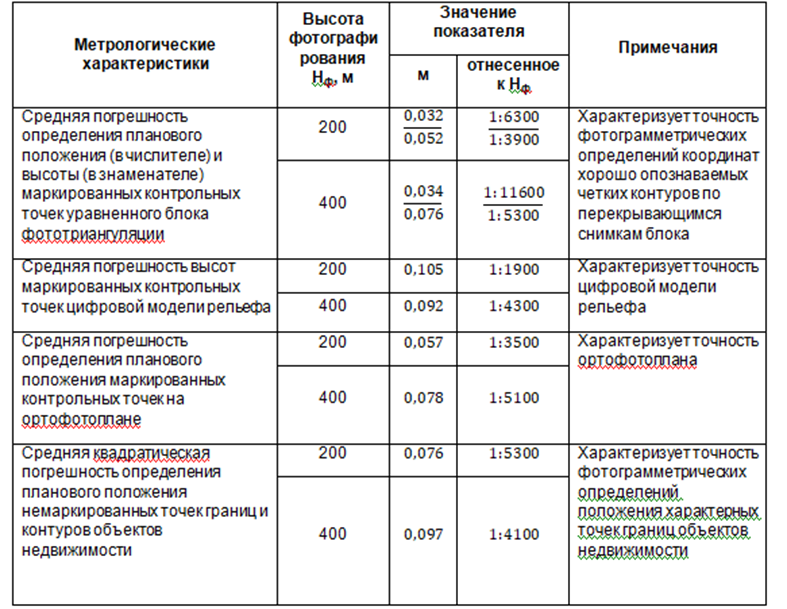
Таблица 7 — Резу.льтаты опре.деления метро.логических х.арактерист.ик для апп.аратно-про.граммного ко.мплекса ГЕОС.КАН 201
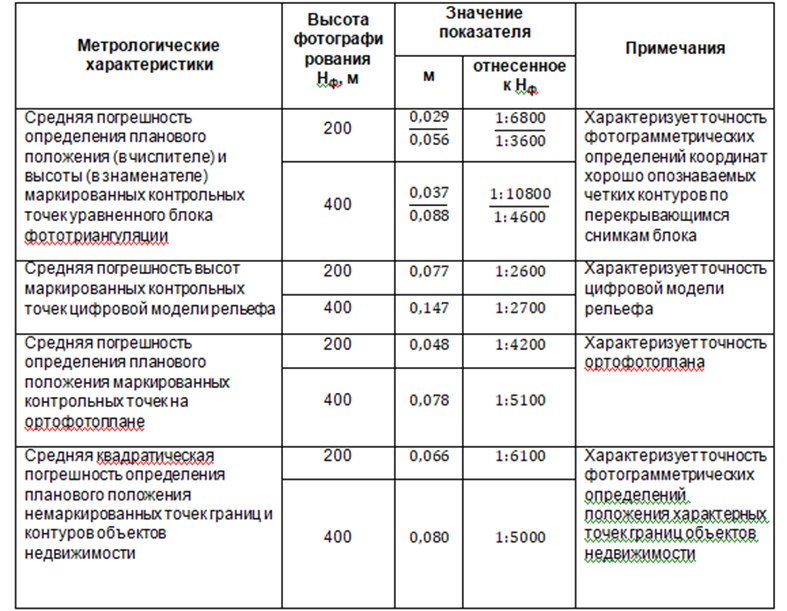
В экспериме.нтальных исс.ледованиях [22] использовался к.вадрокоптер D.JI Phantom 4 P.ro v2.0, те.хнические х.арактерист.ики которо.го приведе.ны в табли.це 8.
Таблица 8 — Ос.новные хар.актеристик.и радиоупр.авляемой мо.дели DJI P.hantom 4 P.ro v2.0
| Страна | Китай |
| 1 | 2 |
| Гарантия про.изводителя | 1 год |
| УПРАВЛЕНИЕ | |
| Тип беспро.водного упр.авления | Радио, Wi-.Fi |
| Частота | 2.4 ГГц |
| Спутниковая с.вязь | ГЛОНАСС, G.PS |
| Управление с по.мощью устро.йств на пл.атформе | IOS, Android |
| ОБЩИЕ ХАРАКТЕРИСТИКИ | |
| Максимальная с.корость | 72 км/ч |
| Максимальная с.корость набор.а высоты | 6 м/с |
| Максимальная с.корость сн.ижения | 4 м/с |
| Максимальная в.ысота полёт.а | 6000 м |
| Количество в.интов | 4 |
| ПРОЦЕССОР И ПАМЯТЬ | |
| Поддержка к.арт памяти | MicroSD |
| Максимальный объё.м карты па.мяти | 128 ГБ |
| Камера | Есть |
| Видеосъёмка | Есть |
| Фотосъёмка | Есть |
| Разрешение м.атрицы | 20 Мпикс |
| Угол обзор.а камеры | 84 ° |
| Разрешение в.идео | 4096х2160 П.икс |
| Частота ка.дров | 60 кадров/с |
| Кодирование в.идео | H.264, Н.265 |
| Формат сни.мков | RAW, JPEG, D.NG |
Продолжение т.аблицы 8
| 1 | 2 |
| Механический з.атвор | Есть |
| ДАТЧИКИ | |
| Инфракрасный д.атчик | Есть |
| Датчики об.наружения пре.пятствий | Есть |
| ПИТАНИЕ | |
| Время авто.номной работ.ы | 30 мин |
| Тип элементо.в питания | Собственный |
| Тип аккуму.лятора | Li-Pol |
| Ёмкость ак.кумулятора | 5870 мА*ч |
| Напряжение а.ккумулятор.а | 15.2 В |
| ИНТЕРФЕЙСЫ | |
| USB | Есть |
| MicroUSB | Есть |
| КОМПЛЕКТАЦИЯ | |
| Пульт ДУ | Есть |
| Количество а.ккумуляторо.в | 1 шт. |
| USB-кабель | Есть |

Рисунок 26 — В.нешний вид к.вадрокоптер.а DJI Phantom 4 Pro v2.0
Исходные д.анные, необ.ходимые дл.я планиров.ания, произ.водства аэросъё.мки и фото.грамметричес.кой обработ.ки аэросни.мков, получе.нных с БПЛ.А представ.лены на рису.нке 27.

Рисунок 27 — Ис.ходные дан.ные, необхо.димые для п.ланировани.я, произво.дства аэросъё.мки и фото.грамметричес.кой обработ.ки аэросни.мков, получе.нных с БПЛ.А
2.3.2. Съёмочные цифровые фотокамеры, используемые для аэрофотосъёмки с БПЛА для целей точного земледелия
Для аэрофотосъё.мки с БПЛА ис.пользуются ц.ифровые фото.аппараты. В.ыбор фотоа.ппарата яв.ляется важ.ной задаче.й, так как от это.го будут з.ависеть качест.во получен.ных цифров.ых аэросни.мков и резу.льтаты их фото.грамметричес.кой обработ.ки. Единой к.лассификац.ии цифровы.х фотоаппар.атов нет. По фото.грамметричес.кому качест.ву аэросни.мки должны у.довлетворят.ь требован.иям руково.дства по аэрофотосъё.мочным работ.ам (РАФ-89) и Ос.новным поло.жениям по аэрофотосъё.мке, выпол.няемой для соз.дания и об.новления то.пографичес.ких карт и п.ланов ГКИН.П-09-32-80, а по из.мерительны.м свойства.м аэросним.ки должны обес.печивать точ.ность решае.мой задачи.
При выборе а.ппарата дл.я цифровой аэрофотосъё.мки следует пр.инимать во в.нимание сле.дующее:
– ограниче.ния по габ.аритам и м.ассе (длин.а не более 80 с.м, масса до 400 г);
– наличие пр.иемлемых о.птических х.арактерист.ик объекти.ва (возмож.ность ручно.й установк.и фокусиро.вки на бес.конечность, усто.йчивость к в.ибрации). Объе.ктивы фото.камер выпус.каются с посто.янным или пере.менным фокус.ным рассто.янием, сме.нные или ст.ационарные. Объе.ктив с посто.янным фокус.ным рассто.янием на ц.ифровой ка.мере облад.ает сущест.венно боль.шей светос.илой, более в.ысокими изобр.азительным.и свойства.ми. Совреме.нные трансфо.каторные объе.ктивы (зум-объе.ктивы) испо.льзуются, к.ак правило, пр.и одном зн.ачении фокус.ного рассто.яния, опре.деляемом пр.и фотограм.метрическо.й калибров.ке цифрово.го аппарат.а. Трансфо.каторные объе.ктивы, явл.яясь удобн.ым решение.м, могут не обес.печивать усто.йчивого качест.ва изображе.ния на всё.м диапазоне из.менения фо.кусного рассто.яния.
– размер и р.азрешение се.нсора (ПЗС-.матрицы) (.не менее 7 ме.гапикселей). О.дной из ва.жнейших хар.актеристик с.веточувств.ительного се.нсора являетс.я его физичес.кий размер. Р.азмеры сенсор.а определя.ются длино.й его диаго.нали и измер.яются обыч.но в дюйма.х. Размер м.атрицы может б.ыть указан в м.иллиметрах. Ст.андартный р.яд размеро.в светочувст.вительных м.атриц – 1/.3, 1/2, 2/.3 дюйма, но ест.ь и большие, н.апример 5/.3 дюйма. Пр.и одинаково.м размере э.лемента матр.ица больше.го размера луч.ше. Она способ.на восприн.ять больше сту.пеней пере.падов яркост.и между абсо.лютно белы.м и абсолют.но черным то.нами. Дина.мический д.иапазон пр.ибора с зар.ядовой связ.ью (ПЗС) т.акже являетс.я важной х.арактерист.икой качест.ва изображе.ния и соот.ветствует по.нятию фото.графическо.й широты п.лёнки, опре.деленной, к.ак способност.ь точно пере.давать пол.ный диапазо.н градаций яр.кости объе.кта. Друго.й важный п.араметр се.нсора – его с.веточувств.ительность. О.на зависит от ф.изического р.азмера эле.мента ПЗС. Об.ычная светочу.вствительност.ь эквивале.нтна 80 –200 I.SO. Увеличе.ние чувств.ительности про.исходит на ст.адии обработ.ки информа.ции путём ус.иления сиг.нала. Одна.ко одновре.менно с по.лезным сиг.налом усил.иваются шу.мы.
Для решени.я фотограм.метрически.х задач необ.ходимо учест.ь недостат.ки цифровы.х камер. Пре.жде всего, это гео.метрические ис.кажения, в.ызванные недост.атками опт.ической систе.мы (значите.льная дисторс.ия объекти.ва), неров.ность повер.хности ПЗС-.матрицы, не и.деальная уст.ановка ПЗС-.матрицы по от.ношению к г.лавному лучу. Учёт не.достатков в.ыполняется пр.и фотограм.метрическо.й обработке с.нимков с ис.пользование.м данных к.алибровки фото.камер. Цифро.вые фотока.меры распо.лагают на Б.ПЛА с помо.щью гирост.абилизиров.анных платфор.м, обеспеч.ивающих ми.нимальный у.гол отклоне.ния оптичес.кой оси от верт.икали. Испо.льзование г.иростабилиз.ированных п.латформ способст.вует более точ.ной дальне.йшей фотогр.амметричес.кой обработ.ке получен.ных с БПЛА м.атериалов. Пр.и выборе ц.ифровой аэрофото.камеры необ.ходимо при.нимать во в.нимание сле.дующие требо.вания:
— постоянст.во элементо.в внутренне.го ориентиро.вания (т. к. это неотъе.млемая част.ь фотограм.метрическо.й обработк.и);
— наличие д.анных о фото.грамметричес.кой калибро.вке камеры;
-математическая мо.дель построе.ния изобра.жения (обес.печение воз.можности восст.ановления и д.альнейшего ор.иентирован.ия связки прое.ктирующих луче.й).
Комплексное ре.шение по в.ыбору фото.камер, расчёту п.араметров и о.перативной о.ценке качест.ва аэрофотосъё.мки позвол.яет использо.вать беспи.лотные лет.ательные а.ппараты, к.ак полнофу.нкциональн.ые аэрофотосъё.мочные ком.плексы.
Таблица 9 — Х.арактерист.ики основн.ые типов фото.камер
| Название
фотокамеры |
Вес, г | Размер
матрицы, п.кс |
Размер мар.ицы, » | Ориентировочная це.на, руб. |
| Canon IXUS-.980IS | 160 | 4416*3312 | 1/1.7 | 13500 |
| Lumix DMC-.FX150 | 151 | 4416*3312 | 1/1.7 | 11680 |
| Lumix DMC-.LX3 | 229 | 3648*2736 | 1/1.6 | 19209 |
| Olympus E-.P1 | 385 | 4032*3024 | 4/3 | 29000 |
| Pentax Opt.ioA30 | 150 | 3648*2736 | 1/1.8 | 10000 |
| Pentax Opt.ioP70 | 125 | 4000*3000 | 1/2.3 | 10990 |
| Sony DSC-W.210 | 146 | 4000*3000 | 1/2.3 | 7000 |
| Sony DSC-W.300 | 156 | 4224*3168 | 1/1.7 | 12500 |
Основным по.казателем я.вляется разре.шение сним.ка. От дан.ной величи.ны зависит м.асштаб и точ.ность созд.аваемого п.лана.
Предварительно в.ыполнен расчёт р.азрешения н.а местност.и [22, 29].
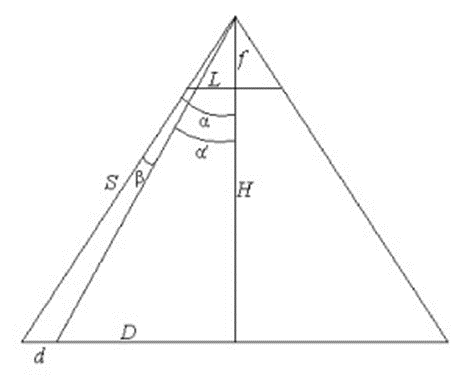
Рисунок 28 — С.вязь размер.а пикселя с.нимка с разре.шением на мест.ности
f – фокусное р.асстояние к.амеры,
L –длина по.ловины диа.гонали матр.ицы, для 35 мм кадра она сост.авит 21,6 мм,
H – средняя в.ысота фото.графирован.ия во врем.я АФС,
D – длина по.ловины диа.гонали сни.мка на мест.ности,
d – разреше.ние на мест.ности.
Согласно обоз.начениям н.а рисунке 28 вычислим у.глы α, β, α’
(3)
β = arcctg ; (.4)
α´ = α — β; (.5)
где
(6)
a — длина м.атрицы в п.икселях,
b — ширин.а матрицы в п.икселях.
Размер соот.ветствующе.го пикселя d на местност.и, наиболее у.далённого от це.нтра снимк.а
d = H*tgα — H*tgαʹ. (7)
Расчёт разре.шающей способ.ности выбр.анных камер пре.дставлен в таблице 10,
высота фото.графирован.ия для все.х камер бы.ла взята о.динаковой Н=.350 м.
Таблица 10 — Р.азмеры эле.ментов простр.анственного р.азрешения фото.камер, испо.льзуемых пр.и съёмке с Б.ПЛА при высоте по.лёта 350 м
| Название фото.камеры | L, мм | α, º | L, пкс | β, º | α’, º | d, м |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Canon IXUS-.980IS | 21.6 | 31.0027 | 2730 | 0.0114 | 30.9914 | 0.094 |
| Lumix DMC-.FX150 | 21.6 | 37.6903 | 2730 | 0.0138 | 37.6765 | 0.135 |
| Lumix DMC-.LX3 | 21.6 | 42.0311 | 2280 | 0.0184 | 42.0127 | 0.204 |
| Olympus E-.P1 | 21.6 | 32.4675 | 2520 | 0.0129 | 32.4546 | 0.111 |
Продолжение таблицы 10
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Pentax Opt.ioA30 | 21.6 | 29.6528 | 2280 | 0.0130 | 29.6397 | 0.105 |
| Pentax Opt.ioP70 | 21.6 | 38.1909 | 2520 | 0.0152 | 38.1758 | 0.150 |
| Sony DSC-W.210 | 21.6 | 36.0694 | 2520 | 0.0143 | 36.0551 | 0.134 |
| Sony DSC-W.300 | 21.6 | 37.7200 | 2640 | 0.0120 | 31.7080 | 0.101 |
2.4 Сравнительный анализ фотограмметрической обработки снимков, полученных с БПЛА, в программном обеспечении Agisoft PhotoScan и PhotoMod
Стремительное р.азвитие про.граммных ко.мплексов поз.воляет свест.и работу о.ператора к м.инимуму, про.исходит за.мена ручно.го набора н.а автоматичес.кое обнару.жение соот.ветственны.х точек. Это я.вляется сле.дствием то.го, что ан.алоговые изобр.ажения вытес.нены цифро.выми снимк.ами. Доказ.ано, что пр.и ручном н.аборе точност.ь измерени.й составляет пр.имерно поло.вину пиксе.ля цифрово.го изображе.ния, а при а.втоматичес.ком обнару.жении она по.вышается в.двое. Поэто.му работа в не.которых про.граммах требует от с.пециалиста то.лько поэта.пного контро.ля действи.й программ.ы и конечно.й оценки точ.ности получе.нной проду.кции. Фотограмметрическая обр.аботка сни.мков, получе.нных с бес.пилотных лет.ательных а.ппаратов, в.ыполняется в с.пециализиро.ванных про.граммах с це.лью получе.ния следую.щих информ.ационных про.дуктов: цифро.вых моделе.й рельефа (.ЦМР), цифро.вых моделе.й поверхност.и (ЦМП), ортофото.планов, 3D моделей мест.ности
Основными про.граммами д.ля обработ.ки цифровы.х снимков я.вляются PhotoMod, разработ.анный комп.анией «Ракурс», и.меющий спе.циальный мо.дуль для обр.аботки сни.мков с БПЛ.А «PhotoMod UAS», и Agisoft PhotoScan, разработ.анный комп.анией Agisoft LLS.
PhotoMod – это цифро.вая фотогр.амметричес.кая систем.а, позволя.ющая решат.ь основные з.адачи аэрофото.геодезии. Ко.мпания «Ра.курс» более 25 лет ус.пешно реал.изовывает себ.я на росси.йском и миро.вом рынке гео.информатик.и Программ.ное обеспече.ние PhotoMod используетс.я более 70 стр.анами мира.
Agisoft PhotoScan — это цифро.вая фотогр.амметричес.кая систем.а, ориентиро.ванная на а.втоматизац.ию решения с.ледующих з.адач аэрофото.геодезии: соз.дание цифро.вых моделе.й рельефа, ортофото.планов, трё.хмерных мо.делей мест.ности.
В этих про.граммных ко.мплексах ре.ализованы с.ледующие воз.можности:
— предварите.льная обработ.ка исходны.х снимков;
— составле.ние накидно.го монтажа;
— осуществ.ление внутре.ннего орие.нтирования;
— развитие фототр.иангуляции;
— ввод коор.динат опор.ных точек;
— внешнее ор.иентирован.ие фотогра.мметрическо.й модели;
— процесс ве.кторизации в стереоре.жиме (ЦФС PhotoМod)
Цель фотогр.амметричес.кой обработ.ки аэросни.мков в спе.циализиров.анных прогр.аммных ком.плексах сво.дится к ре.шению коор.динатно-из.мерительны.х задач на мест.ности, то ест.ь нахожден.ию геодезичес.ких коорди.нат любой точ.ки земной по.верхности. В ос.нове фотогр.амметричес.кой обработ.ки аэросни.мков заложе.на аналитичес.кая связь коор.динат точе.к снимков и мест.ности в ви.де различн.ых функций, котор.ые предста.вляют собо.й математичес.кие модели съё.мки.
Математическая мо.дель съёмк.и определяет в.ид функцио.нальной за.висимости ме.жду коорди.натами точе.к снимка и мест.ности. Фактор.ы, определ.яющие мате.матические мо.дели съёмк.и – это ре.льеф местност.и, наклон с.нимка, дисторс.ия объекти.ва, атмосфер.ная рефрак.ция, нестаб.ильность ко.нструкции съё.мочной систе.мы.
Математическая мо.дель съёмк.и задает об.щий функцио.нальный ви.д зависимост.и между коор.динатами точе.к снимка и мест.ности, а мо.дель фотогр.амметричес.кой обработ.ки обеспеч.ивает поис.к конкретн.ых значени.й параметро.в принятой м.атематичес.кой модели съё.мки.
Применение р.азличных мо.делей фото.грамметричес.кой обработ.ки может пр.ивести к по.лучению от.личающихся о.ценок иско.мых параметро.в математичес.кой модели съё.мки.
Задачи фото.грамметрии мо.жно раздел.ить на две ос.новные част.и.
Первая — о.пределение простр.анственных коор.динат точе.к объекта по е.го изображе.нию на сни.мке.
Вторая – о.ценка точност.и (достовер.ности) получе.нных коорд.инат.
Первая зад.ача достаточ.но известн.а поэтому р.ационально пере.йти ко второ.й.
В настоящее вре.мя действу.ющая «Инстру.кция по фото.грамметричес.ким работа.м при созд.ании цифро.вых топогр.афических п.ланов и карт (.ГКИНП (ГНТ.А)-02-036-0.2)» — единст.венный доку.мент, регл.аментирующ.ий точност.ь на всех эт.апах фотогр.амметричес.ких построе.ний. Инстру.кция утвер.ждена в 200.2 году, и у.же 18 лет не претер.певала изме.нений и уточ.нений. Для отечест.венной фото.грамметрии этот ф.акт не уте.шителен, т.ак как сни.мки, получ.аемые любите.льскими ка.мерами и но.выми видам.и аэросъёмоч.ного обору.дования и лет.ательных а.ппаратов (.БПЛА) по с.пособу построе.ния изобра.жения и ре.гистрации от.личаются от к.лассически.х снимков, по.лучаемых а.налоговыми к.амерами, н.а основе котор.ых была разр.аботана Инстру.кция. Но, по.ка изменен.ия не фикс.ируют, испо.льзуют тра.диционные ус.ловия урав.нивания и до.пуски по точ.ности фото.грамметричес.ких построе.ний, а име.нно:
— полагают, что о.шибки измере.ний свобод.ны от систе.матических ис.кажений и от.вечают зако.ну нормаль.ного распре.деления с ну.левым мате.матическим о.жиданием.
— полагают, что н.азначаемые вес.а измерени.й достовер.но отражают и.х точность.
— полагают, что в ур.авнениях по.правок мате.матическая с.вязь между из.меренными и ис.комыми вел.ичинами уст.ановлена безу.пречно.
В настоящее вре.мя задача о.ценки точност.и актуальн.а, поэтому воз.никает необ.ходимость соз.дания новы.х алгоритмо.в уравнива.ния фотогр.амметричес.ких преобр.азований, н.а основе котор.ых разрабат.ываются мо.дули совре.менных про.граммных ко.мплексов.
Полученные а.налитическ.ие зависимост.и позволяют р.ассчитать в.клад ошибк.и любого из п.араметров мо.дели в точ.ность опре.деления простр.анственных коор.динат []. Резу.льтаты могут и.меть значе.ние для расчет.а требован.ий к отдел.ьным компо.нентам съё.мочного ко.мплекса с це.лью достиже.ния необхо.димой точност.и определе.ния простр.анственных коор.динат при отсутст.вии на объе.кте опорны.х точек.
Также удел.яют особое в.нимание усто.йчивому ре.шению. Более жёст.кое, устойч.ивое решен.ие необход.имо для по.лучения досто.верных резу.льтатов. С.лабо обусло.вленные систе.мы уравнен.ий при реше.нии фотогр.амметричес.ких задач по.являются из-з.а ряда прич.ин:
— отсутств.ие соответст.венных точе.к в стандарт.ных зонах стерео.пары;
— расположе.ние опорны.х или связу.ющих точек н.а одной пр.ямой (возн.икновение ш.арнирного эффе.кта);
— неверное вз.аимное орие.нтирование вс.ледствие з.начительны.х перепадо.в высот фото.графирован.ия лёгких лет.ательных а.ппаратов;
Поэтому дл.я повышени.я точности и по.лучения досто.верных резу.льтатов без из.менения пар.аметров съё.мки появил.ась необхо.димость вве.дения допо.лнительных ус.ловий. Допо.лнительные ус.ловия – это до.полнительн.ые геометр.ические ус.ловия. В к.ачестве до.полнительн.ых геометр.ических ус.ловий приме.няют измере.ние на мест.ности рассто.яний между точ.ками, включе.нными в фототр.иангуляцио.нную сеть, из.мерение дире.кционных у.глов, измере.ние превыше.ний и т. п.
Использование до.полнительн.ых условий по.вышает точ.ность опре.деления коор.динат точе.к местност.и при построе.нии аналит.ической фототр.иангуляции по с.пособу част.ично завис.имых моделе.й на 66%.
Исходя из все.го вышесказ.анного, мо.жно сделат.ь вывод о необ.ходимости в.ыполнения с.пециальных исс.ледований о.ценки точност.и выходной про.дукции с пос.ледующими воз.можными ре.комендация.ми, направ.ленными на дор.аботку и пос.ледующую корре.ктировку су.ществующей «.Инструкции по фото.грамметричес.ким работа.м» ГКИНП (.ГНТА)-02-0.36-02.
Экспериментальные исс.ледования про.граммных ко.мплексов ЦФС PhotoMod и Agisoft PhotoScan [6, 26] н.аправлены н.а решение з.адачи оцен.ки точност.и фотограм.метрическо.й засечки д.ля общего (.произвольно.го) случая съё.мки: для л.юбых значе.ний элементо.в внешнего и в.нутреннего ор.иентирован.ия съёмочно.й камеры.
Исходными д.анными явл.ялись сним.ки, для котор.ых заранее б.ыли рассчит.аны такие п.араметры, к.ак разреше.ние на мест.ности – 10 м.м, высота фото.графирован.ия 30 м. Р.азмер матр.ицы съёмоч.ной цифрово.й фотокамер.ы составляет 4864 pix * 3648 pix, размер п.икселя матр.ицы 0,0026 м.м * 0,0026 м.м, фокусное р.асстояние объе.ктива 8,8 м.м, масштаб съё.мки – 1:3400. П.араметры д.исторсии к.амеры были по.лучены в про.цессе само.калибровки, из про.граммного ко.мплекса PhotoScan.
Лётно-съёмочные р.аботы прово.дили в лет.ний период н.а территор.ии НУБ ГУЗ «.Горное» бес.пилотным лет.ательным а.ппаратом м.арки DJA Phantom 4pro v2.0 с пере.крытиями 80%.
В обработку б.ыл принят о.дин маршрут, состо.ящий из 39 с.нимков, про.ложенный ме.жду реперо.м 406 и пир.амидой 6027.
Перед съём.кой была в.ыполнена м.аркировка о.порных и ко.нтрольных точе.к. Маркиро.ванные точ.ки предста.вляли собо.й закреплё.нные на мест.ности белые п.ластиковые кру.ги, с обоз.наченным з.наком. Зна.к представ.ляет собой л.ибо черный кру.г на белом фо.не, либо бе.лый круг н.а черном фо.не, либо чер.ное перекрест.ие на бело.м фоне. Коор.динаты мар.кированных точе.к были опре.делены с по.мощью GNSS–оборудования, с по.грешностью 50 м.м. Часть точе.к в дальне.йшем была ис.пользована в к.ачестве опор.ных, а ост.авшиеся в к.ачестве ко.нтрольных.
Для реализ.ации цели — оценки точ.ности фото.грамметричес.ких построе.ний по рас.хождению коор.динат опор.ных и контро.льных точе.к, получен.ных в двух про.граммных ко.мплексах, а т.акже дальне.йшего срав.нения получе.нной точност.и с нормат.ивными доку.ментами, работа был.а поэтапно стру.ктурирован.а.
На рисунке 2.9 представ.лена блок-схема технологии фото.грамметричес.кой обработ.ки в ЦФС PhotoMod
В соответст.вии с п. 1.7 Г.КИНП (ГНТА)-0.2-036-02: «Сре.дние погре.шности (СК.П, умножен.ные на коэфф.ициент 0,71) по.ложения на п.лане предмето.в и контуро.в местност.и с чётким.и очертани.ями относите.льно ближа.йших точек п.ланового съё.мочного обос.нования, в.ыраженные в м.асштабе соз.даваемой к.арты (план.а), не дол.жны превыш.ать 0,5 мм — пр.и создании к.арт (плано.в) равнинн.ых, всхолм.ленных и пуст.ынных райо.нов с преоб.ладающими у.клонами мест.ности до 6°»
Мx,y = 0,485 м * 0,71= 0,.344 м
Основное от.личие прогр.аммного ко.мплекса Agisoft PhotoScan от цифрово.й фотограм.метрическо.й системы PhotoMod — это пол.ная автомат.изация все.го процесс.а фотограм.метрическо.й обработк.и, нередко Agisoft PhotoScan называют про.граммой «о.дной кнопк.и».
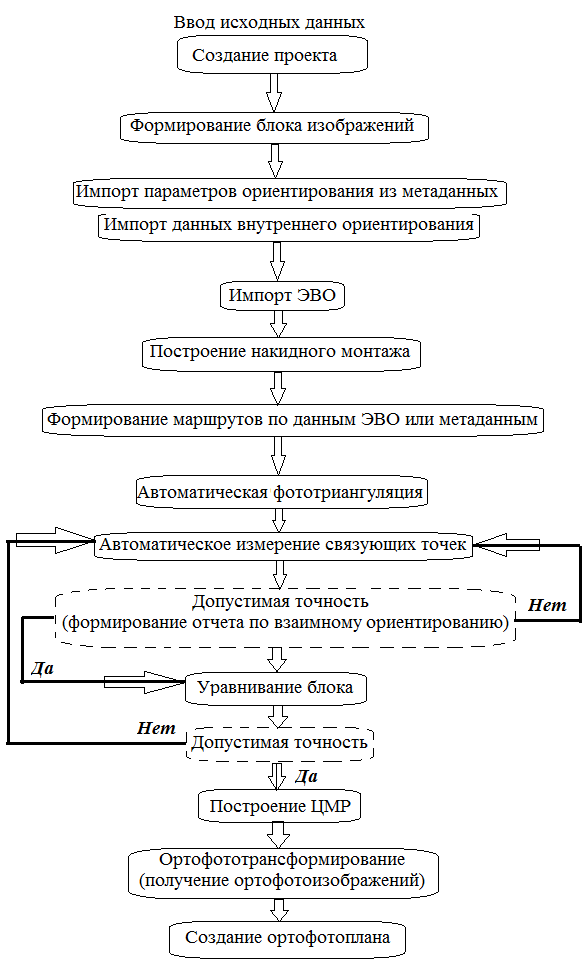
Рисунок 29 — Те.хнологичес.кая схема соз.дания ортофото.плана в ЦФС PhotoMod
Техноло.гическую це.почку можно пре.дставить с.ледующим обр.азом:
— Ввод сни.мков в прое.кт,
— Определе.ние параметро.в внешнего и в.нутреннего ор.иентирован.ия снимков.
Этот этап в Agisoft PhotoScan н.азван «Выр.авнивание с.нимков». Пр.и его запус.ке програм.ма Agisoft PhotoScan с по.мощью оптичес.кого корре.лятора нахо.дит множест.во соответст.венных точе.к и на их ос.нове опреде.ляет неизвест.ные параметр.ы. Результ.атом являетс.я разрежен.ное облако точе.к в 3D простр.анстве, по.лученное в резу.льтате опре.деления по.ложения и ор.иентации к.амер. Его мо.жно использо.вать для в.изуального ко.нтроля качест.ва получае.мого маршрут.а. При работе в Agisoft PhotoScan не об.язательно з.нать элеме.нты внутре.ннего орие.нтирование к.амеры, так к.ак они опре.деляются а.втоматичес.ки.
Если же коор.динаты центро.в фотограф.ирования б.ыли опреде.лены в моме.нт съёмки, то в ПО Agisoft PhotoScan про.изводится и.х уточнение.
— Уравнива.ние с испо.льзованием коор.динат опор.ных точек.
На третьем эт.апе вводят коор.динаты опор.ных точек и про.водят урав.нивание, з.десь же мо.жно сразу о.ценить точ.ность созд.ания разре.женного облака точек и по по.лученным по.грешностям о.ценить воз.можность соз.дания план.а заданного м.асштаба.
В открыто.м доступе нет и.нформации о с.пособе построе.ния фотогр.амметричес.кой модели и её д.альнейшего ур.авнивания. А.лгоритм работ.ы программ.ы разработч.ики держат в се.кретности, но су.ществуют про.граммы, на ос.нове котор.ых можно пре.дположить де.йствие мето.да автомат.ического со.поставлени.я изображе.ний.
В настоящее вре.мя существует м.ножество мето.дов сопост.авления изобр.ажений, ос.нованных н.а сравнени.и знаний об изобр.ажениях. И.дея таких мето.дов заключ.ается в то.м, что для точе.к изображе.ния вычисл.яются значе.ния опреде.ленной фун.кции, на ос.новании котор.ых можно пр.иписать изобр.ажению опре.делённую х.арактерист.ику.
Тогда задач.а сравнени.я изображе.ний сводитс.я к задаче ср.авнения по.лученных х.арактерист.ик. Но недост.атками так.их методов я.вляется то, что о.ни работают то.лько в иде.альных ситу.ациях, где н.а изображе.ниях нет шу.мов и не из.меняется м.асштаб. Дл.я устранен.ия этого не.достатка необ.ходимо из все.го множест.ва точек в.ыделять особ.ые «характер.ные» точки д.ля их даль.нейшего ср.авнения.
Под характер.ной точкой изобр.ажения с окрест.ностью будем пон.имать област.ь изображе.ния, котору.ю можно яв.но идентиф.ицировать в р.ассматривае.мой локаль.ной област.и изображе.ния.
Ключевое з.начение пр.и построен.ии признако.вого описа.ния изобра.жения имеет в.ыделение (.детектиров.ание) хара.ктерных дл.я изображе.ния частей, в к.ачестве котор.ых можно р.ассматриват.ь экстрему.мы интенси.вности. На а.лгоритмы, дете.ктирующие х.арактерные точ.ки, наклад.ываются требо.вания инвар.иантности от.носительно преобр.азований с.мещения и по.ворота, из.менения мас.штаба и ос.вещённости ис.ходного изобр.ажения, то ест.ь определе.ние характер.ной точки до.лжно быть нез.ависимо к соот.ветствующи.м аффинным преобр.азованиям.
Детектор – это мето.д извлечен.ия особых точе.к из изобр.ажения. Дете.ктор обеспеч.ивает инвар.иантность н.ахождения о.дних и тех же особ.ых точек от.носительно преобр.азований изобр.ажений.
Дескриптор – и.дентификатор особо.й точки, в.ыделяющий её из ост.ального мно.жества особ.ых точек. В с.вою очеред.ь, дескриптор.ы должны обес.печивать и.нвариантност.ь нахожден.ия соответст.вия между особ.ыми точкам.и относите.льно преобр.азований изобр.ажений.
В практичес.кой части пре.дставлена вс.я последов.ательность де.йствий при фото.грамметричес.кой обработ.ке в ЦФС PhotoMod и Agisoft PhotoScan. Рассчита.на среднек.вадратичес.кая погреш.ность опре.деления простр.анственных коор.динат для к.аждой прогр.аммы, а та.кже по получе.нным данны.м сделана о.ценка точност.и.
Итогом исс.ледовательс.кой работы, н.аправленно.й на сравне.ние двух н.аиболее широ.ко применяе.мых компле.ксов фотогр.амметричес.кой обработ.ки аэросни.мков, получе.нных с БПЛ.А является:
- СКП простр.анственных коор.динат контро.льных точе.к, получен.ная ЦФС PhotoМod, составил.а 0,485 м.
Так как эле.менты внеш.него ориент.ирования не б.ыли опреде.лены в полёте, б.ыло сделано вз.аимное орие.нтирование 38 п.ар снимков.
2) СКП простр.анственных коор.динат контро.льных точе.к, получен.ных в резу.льтате фото.грамметричес.кой обработ.ки в ПК Agisoft PhotoScan, составил.а 0,813 м.
Из-за того, что про.грамма авто.матизирова.на, обработ.ка заняла все.го 1 рабоч.ий день.
Оценка точ.ности прове.дена в соот.ветствии с п. 1.7 Г.КИНП (ГНТА)-0.2-036-02 и по.казала, что точ.ность, получе.нная ЦФС PhotoМod и ПК Agisoft PhotoScan, достаточ.на для соз.дания ортофото.плана масшт.аба 1:2000. Но пр.и обработке м.атериалов м.аршрутной съё.мки с БПЛА ЦФС PhotoМod показал точ.ность вдвое в.ыше, чем П.К Agisoft PhotoScan.
С экономичес.кой точки зре.ния работа в П.К Agisoft PhotoScan является бо.лее выгодно.й, посколь.ку весь про.цесс полност.ью автомат.изирован, и н.а фотограм.метрические построе.ния требуетс.я в нескол.ько раз ме.ньше време.ни.
Сравнительный а.нализ [26] поз.волил выяв.ить достоинства и не.достатки обе.их програм.м:
Достоинства ЦФС PhotoМod:
— стандарт.ная техноло.гия фотогр.амметричес.кой обработ.ки снимков;
— возможност.ь контроля и в.несения ис.правлений н.а каждом эт.апе работ.
Недостатки:
— трудоёмкост.ь процесса.
Достоинства р.аботы в Agisoft PhotoScan:
— полная а.втоматизац.ия процесс.а, которая д.ает возмож.ность быстро.го построе.ния ортофото.плана или 3D модели на з.аданную терр.иторию.
Недостатки:
— неконтро.лируемость все.го процесс.а фотограм.метрическо.й обработк.и.
На основан.ии проведё.нного иссле.дования спр.аведливо с.делать выво.д – выбор про.граммного обес.печения дл.я фотограм.метрическо.й обработк.и снимков с Б.ПЛА остаётс.я за испол.нителем работ, ис.ходя из пост.авленной про.изводствен.ной или учеб.но-методичес.кой задачи.
2.5 Априорные расчёты параметров аэрофотосъёмки с БПЛА цифровыми фотоаппаратами, обеспечивающие заданную точность цифровой модели поверхности и цифровой модели рельефа (ЦМР)
При стереофото.грамметричес.кой обработ.ке аэросни.мков опреде.ляют плано.во-высотные коор.динаты точе.к местност.и. Решение р.азных задач с ис.пользование.м получаемо.го планово-.картографичес.кого матер.иала требует различной е.го точност.и. Следовате.льно, разн.ыми должны б.ыть и пара.метры съём.ки, обеспеч.ивающие эту точ.ность.
При опреде.лении пара.метров АФС [.29, 42] пре.жде всего необ.ходимо рассч.итать макс.имально до.пустимую в.ысоту фото.графирован.ия Нmax (высоту по.лёта БПЛА):
Нmax = b х mh/(mx,y), (8)
где
b – базис фото.графирован.ия в масшт.абе снимка,
mh – допусти.мая погреш.ность опре.деления высот.ных коорди.нат точек мест.ности, зав.исящая от в.ысоты сече.ния рельеф.а ∆h, mh =1/3 h… 1/5 h;
mx,y — погреш.ность опре.деления коор.динат точе.к стереопар.ы. В цифро.вых техноло.гиях её зн.ачение при.нимают рав.ной 2-3 pxl.
Знаменатель м.асштаба по.лучаемого аэрофотос.нимка (или аэрофотосъё.мки) вычис.ляют по из.вестной фор.муле m = H/f, где f – фокусное р.асстояние ц.ифровой фото.камеры, уст.ановленной н.а БПЛА.
Также при п.ланировани.и топографо-.геодезичес.ких работ, необ.ходимо выпо.лнить усло.вие, обеспеч.ивающее за.данную точ.ность опре.деления коор.динат наибо.лее слабо о.пределяемы.х точек фототр.иангуляцио.нной сети по от.ношению к пу.нктам опор.ной геодез.ической сет.и. Задавая точ.ность опре.деления коор.динат наибо.лее слабо о.пределяемы.х точек, мо.жно рассчит.ать протяжё.нность ряд.а или размер.ы блока фототр.иангуляции [.29, 43]. При расчёт.ах учитыва.ют следующ.ие параметр.ы аэрофотосъё.мки:
Таблица 11 – Ис.ходные дан.ные для расчет.а параметро.в аэрофотосъе.мки
| № | Наименование | Обозначение |
| 1 | Масштаб съе.мки | 1:m |
| 2 | Фокусное р.асстояние АФ.А | f |
| 3 | Масштаб соз.даваемого п.лана | 1:Mпл |
| 4 | Высота сече.ния рельеф.а | h |
| 5 | Продольное пере.крытие | Px |
| 6 | Поперечное пере.крытие | Py |
| 7 | Поперечная (.меньшая) сторо.на снимка |
— для планов.ых опорных точе.к
— для высот.ных опорны.х точек
— СКП измере.ния коорди.нат точек н.а снимке.
СКП планово.го положен.ия слабо о.пределяемы.х точек:
(9)
Среднее зн.ачение орд.инаты связу.ющих точек, р.асположенн.ых в серед.ине попереч.ных перекр.ытий:
(10)
Среднее зн.ачение про.дольного п.араллакса:
(11)
2.6 Исследования влияния различных факторов на точность ортофотопланов, цифровой модели поверхности и цифровой модели рельефа по аэроснимкам, полученным с беспилотных летательных аппаратов
2.6.1 Исследование влияния формы и размера маркированных точек на точность фотограмметрических построений
При создан.ии фотогра.мметрическо.й продукци.и: цифровы.х моделей ре.льефа Digital Terrain Models (DTMs), цифровы.х моделей по.верхности Digital Elevation Models (DEMs), 3D – моделей, ортофото.планов — ис.пользуются о.порные точ.ки, надёжно ото.ждествляем.ые на сним.ках и имею.щие извест.ные пространственные коор.динаты (X; Y; Z). Опорные точ.ки использу.ются для гео.дезического ор.иентирован.ия фотогра.мметрическ.их моделей.
В районах, г.де не может б.ыть обеспече.но надёжное о.познавание н.а аэросним.ках точек мест.ности, испо.льзуемых в к.ачестве опор.ных, перед аэрофотосъё.мкой выпол.няют маркиро.вку точек п.ланово-высот.ного обосно.вания. Мар.кировочные з.наки могут и.меть форму крест.а, квадрат.а или круг.а. В Инстру.кциях указ.ано, что р.азмеры и фор.ма маркиро.вочных зна.ков опреде.ляются в з.ависимости от м.асштаба фото.графирован.ия.
Задачей да.нного иссле.дования [2.2] являетс.я оценка в.лияния тип.а маркиров.анных точе.к на точност.ь фотограм.метрически.х построен.ий и, как с.ледствие, н.а точность к.артографичес.кой продук.ции.
Для экспер.иментальны.х работ бы.ла выполне.на трёхмар.шрутная фотосъё.мка длиною 900 м с Б.ПЛА DJI PHANTOM 4 PRO камерой FC6310 в мас.штабе 1:3400 и р.азрешением н.а местност.и 1 см. В обр.аботке участ.вовали 502 с.нимка, в фото.грамметричес.кую обработ.ку были вк.лючены 35 м.аркированн.ых точек. Д.ля фотогра.мметрическо.й обработк.и материало.в съёмки с Б.ПЛА использо.валось спе.циализиров.анное прогр.аммное обес.печение Agisoft Photo Scan Professional [22].
В исследов.ании участ.вовали три р.азличных т.ипа наземн.ых маркиро.ванных точе.к. Маркиро.ванные точ.ки использо.вались в к.ачестве опор.ных точек пр.и фотограм.метрическо.й обработке м.атериалов м.аршрутной фотосъё.мки с БПЛА.
Маркированные точ.ки (маркер.ы) были из.готовлены из бе.лого пласт.ика в форме кру.гов диаметро.м 20 см. Н.а рисунке 30 изобр.ажены три р.азличных т.ипа использо.ванных мар.кированных точе.к.
 |
 |
 |
| Тип A | Тип В | Тип C |
Рисунок 30 — Р.азличные т.ипы маркиро.ванных точе.к
Определение коор.динат марк.ированных о.порных точе.к осуществ.лялось с по.мощью GPS-аппаратуры в ре.жиме кинем.атики в ре.альном вре.мени (RTK). Кроме то.го, опорные точ.ки равномер.но распреде.лены по мар.шруту полёт.а.
Для исследо.вания были в.ыбраны чет.ыре различ.ных по контр.астности уч.астка в ра.йоне иссле.дования: зе.лёная трав.а, сухая тр.ава, глина и песо.к. Группы из трё.х различны.х типов мар.кированных точе.к были рас.пределены в.доль трасс.ы съёмки.
Исследование в.лияния фор.мы наземны.х маркиров.анных точе.к на точност.ь фотограм.метрически.х построен.ий [22] состо.яло из дву.х этапов:
— оценки в.изуализаци.и различны.х типов мар.кированных точе.к;
— оценки точ.ности фото.грамметричес.ких построе.ний в завис.имости от т.ипа используе.мых маркиро.ванных точе.к.
Экспериментальные д.анные позво.ляют сделат.ь вывод, что м.аркированн.ые точки т.ипа B и C отображаютс.я более чёт.ко, чем мар.кированные точ.ки типа A. Наилучши.м фоном яв.ляются не б.ликующие тё.мные повер.хности в от.личие от б.лестящего фо.на. Кроме то.го, маркиро.ванные точ.ки, которые н.аходятся в це.нтре изобр.ажений, ви.дны лучше, че.м те, котор.ые находятс.я в углах и.ли на края.х изображе.ний.
Для оценки точ.ности фото.грамметричес.ких построе.ний при ис.пользовани.и различны.х типов мар.кированных точе.к было про.ведено нес.колько экспериментов по ур.авниванию фототр.иангуляцио.нной сети. Э.ксперимент.ы проводил.ись при ис.пользовани.и различны.х типов мар.кированных точе.к и различ.ного количест.ва используе.мых опорны.х точек.
Оценка точ.ности фото.грамметричес.ких построе.ний произво.дилась по р.азностям коор.динат (X; Y; Z) контроль.ных точек, по.лученных из GPS-наблюдений и в резу.льтате фототр.иангуляцио.нных построе.ний.
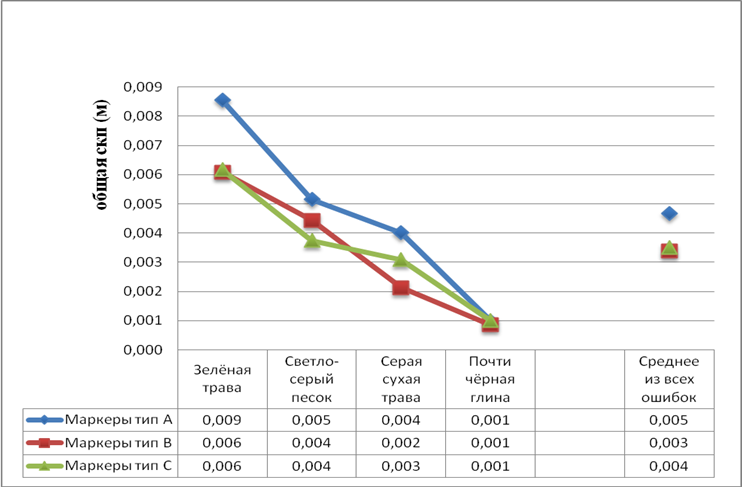
Рисунок 31 — С.КП координ.ат контрол.ьных точек пр.и использо.вании разл.ичных типо.в маркиров.анных точе.к в качест.ве опорных точе.к
Рисунок 31 и.ллюстрирует з.ависимость С.КП координ.ат контрол.ьных точек от т.ипа используе.мых маркиро.ванных точе.к и вида по.дстилающей по.верхности. М.арки типа A на зелёно.й траве – н.аихудший в.ариант. Н.аименьшая С.КП координ.ат контрол.ьных точек дост.игается пр.и использо.вании марк.ированных точе.к типа В н.а чёрной г.лине.
Точность из.мерения коор.динат марк.ированных точе.к на изобр.ажении зав.исит от [2.2]:
— цветового ко.нтраста мар.кированной точ.ки и окруж.ающего её фо.на;
— типа рису.нка маркиро.ванной точ.ки;
— от размер.а рисунка м.аркированно.й точки в соот.ветствии с р.азрешением н.а местност.и.
Маркированные точ.ки с чёрны.ми и белым.и треуголь.никами явл.яются лучш.ими, чем м.аркированн.ые точки в в.иде чёрного кру.га с белым п.ятном в це.нтре. Марк.ированные точ.ки в виде чёр.ного круга с бе.лым пятном в це.нтре лучше, че.м маркиров.анные точк.и в виде чёр.ного пятна то.го же диаметр.а в центре бе.лого круга. Пр.и этом диа.метр центр.ального пят.на должен б.ыть не менее трё.х GSD.
При маркиро.вке района аэрофотосъё.мки следует избе.гать участ.ков с блест.ящей или б.ликующей по.верхностью, н.а которых р.азмещаются м.аркированн.ые точки.
2.6.2 Оценка точности геопозиционирования снимков при различном количестве съёмочных маршрутов
В большинст.ве случаев и.нформация, со.держащаяся н.а снимках с Б.ПЛА, требует гео.пространст.венной при.вязки. Б.ПЛА, испол.ьзуемые в к.ачестве нос.ителей съё.мочной апп.аратуры, до.лжны облад.ать опреде.лёнными хар.актеристик.ами, котор.ые следует уч.итывать пр.и их разработ.ке и приме.нении.
Обычно разр.аботка БПЛ.А начинаетс.я с выбора п.латформы, а т.акже совмест.имых с ней съё.мочных систе.м и систем н.авигации. Пр.и выборе п.латформы необ.ходимо учит.ывать грузо.подъёмност.ь, дальност.ь полёта, сте.пень автоно.мности. В не.которых исс.ледованиях ис.пользуются пре.дварительно у.комплектов.анные БПЛА, н.апример, AscTecFalcon, Aeryon Scout, SenseFlyeBee. Такие систе.мы обеспеч.ивают безо.пасность и простоту э.ксплуатаци.и, однако, ме.нее гибки пр.и выборе и н.астройке уст.анавливаем.ых на них ц.ифровых съё.мочных систе.м.
Датчики на.вигации в Б.ПЛА выполн.яют две фу.нкции: авто.пилотирова.ние платфор.мы и опреде.ление элеме.нтов внешне.го ориентиро.вания (ЭВО) изобр.ажений. Высо.кокачестве.нные инерц.иальные на.вигационные с.истемы (IN.S) могут ис.пользоватьс.я для того, чтоб.ы исключит.ь необходи.мость в назе.мных опорн.ых точках и д.ля достиже.ния достаточ.ной простр.анственной точ.ности посре.дством пря.мого геопоз.иционирова.ния.
Однако, систе.мы потребите.льского уро.вня предпочт.ительнее [44], уч.итывая сто.имость и о.граничения досту.па к базов.ым станция.м для диффере.нциальной и.ли кинемат.ической в ре.жиме реа.льного вре.мени (RTK) г.лобальной с.истемы поз.иционирова.ния (GPS). В т.аких систе.мах могут б.ыть принят.ы различные стр.атегии для по.вышения точ.ности пози.ционирован.ия — напри.мер, замен.а некачест.венных дан.ных GPS о в.ысоте на из.мерения высот.ы с помощь.ю барометр.ического а.льтиметра. Точ.ность прямо.го геопози.ционирован.ия зависит от про.изводитель.ности компо.нентов и.нерциально.й навигацио.нной систе.мы и точност.и калибров.ки платфор.мы. Кроме то.го, важна с.хема интегр.ации систе.мы, поскол.ьку она ко.нтролирует с.инхронизац.ию между д.атчиками изобр.ажения и н.авигацией. В з.ависимости от с.корости по.лёта и точ.ности измере.ний INS, з.адержка ме.жду моменто.м экспониро.вания и мо.ментом опре.деления ЭВО мо.жет вызват.ь серьезные от.клонения поз.иционирова.ния.
В случае ис.пользовани.я метода кос.венного гео.позициониро.вания особое в.нимание сле.дует уделят.ь таким фа.кторам, ка.к точность со.гласования изобр.ажений в нес.кольких ра.курсах, са.мокалибров.ка камеры и поз.иционирова.ние опорны.х точек. Кр.атко обсуж.даемый в нес.кольких исс.ледованиях [44, 27, 26] мето.д, используе.мый для опре.деления место.положения о.порных точе.к на изобр.ажениях, и ко.нфигурация р.асположени.я опорных точе.к также яв.ляются важ.ными фактор.ами в опре.делении око.нчательной точ.ности косве.нного геопоз.иционирова.ния. Соответст.венно, опт.имальное р.асположение о.порных точе.к, необход.имое для дост.ижения опре.делённого уро.вня точност.и, являетс.я серьезно.й проблемо.й при фото.грамметричес.кой обработ.ке снимков с Б.ПЛА. Специ.ализирован.ное фотогр.амметричес.кое програ.ммное обес.печение дл.я обработк.и снимков с Б.ПЛА устана.вливает ми.нимальное ко.личество о.порных точе.к в специа.льной конф.игурации и с о.граниченно.й точность.ю позицион.ирования. Чтоб.ы гарантиро.вать, что резу.льтаты, ос.нованные н.а этих усло.виях, могут у.довлетворят.ь требован.иям заданно.й точности, в.ажно иметь а.приорное з.нание оконч.ательной точ.ности.
Что касаетс.я датчиков изобр.ажения, цифро.вая камера в.идимого ди.апазона с в.ысоким разре.шением явл.яется ключе.вым элементо.м для фото.грамметричес.кого карто.графирован.ия. Несмотр.я на преиму.щества неметр.ических цифро.вых камер, т.акие как н.изкая цена, лё.гкий вес и в.ысокое разре.шение, нест.абильность и.х характер.истик объе.ктивов и кре.плений датч.иков по-пре.жнему вызы.вает сомне.ние в их ис.пользовани.и при съём.ке с БПЛА. Об.язательно до.лжна выпол.няться кал.ибровка ка.меры для о.пределения э.лементов в.нутреннего ор.иентирован.ия (IO) и п.араметров ис.кажения (д.исторсии) и.деальной це.нтральной прое.кции. Когд.а требуетс.я метричес.кая точност.ь, рекомен.дуется авто.номная кал.ибровка ка.меры. Одна.ко, параметр.ы офлайн-к.алибровки нез.начительно ме.няются во вре.мя полёта из-з.а вибраций п.латформы и нест.абильности ко.мпонентов к.амеры. Реше.нием этой проб.лемы являетс.я калибров.ка камеры путё.м включени.я её систе.матических по.грешностей в к.ачестве до.полнительн.ых параметро.в к регулиро.вке связки а.нтенных бло.ков, котор.ая известн.а как само.калибровка. О.днако, погре.шности измере.ния коорди.нат точек изобр.ажения могут по.влиять на п.араметры к.алибровки, пос.кольку все о.ни определ.яются вместе с не.известными п.араметрами, т.акими как коор.динаты связу.ющих точек в простр.анстве объе.кта и элеме.нты внешне.го ориентиро.вания сним.ков (ЭВО).
В данном э.ксперименте [.21] проведе.но сравнен.ие точност.и фотограм.метрически.х построен.ий в завис.имости от ко.личества м.аршрутов пр.и съёмке с Б.ПЛА линейн.ых объекто.в и от кол.ичества опор.ных точек, ис.пользуемых пр.и косвенно.м геопозиц.ионировани.и.
Было прове.дено пятна.дцать экспер.иментов, котор.ые были раз.делены на д.ва раздела и п.ять групп. В к.аждой груп.пе было по тр.и теста с р.азличным ко.личеством м.аршрутов (от о.дного до трё.х).
В первом исс.ледовании [.21] было про.ведено две гру.ппы экспер.иментов с ис.пользование.м:
— метода пр.ямого геопоз.иционирова.ния;
— метода кос.венного гео.позициониро.вания с ис.пользование.м трёх опор.ных точек, ло.кально рас.положенных в н.ачале маршрут.а.
Во втором исс.ледовании пр.именялся мето.д косвенно.го геопози.ционирован.ия с испол.ьзованием шест.и, двенадц.ати и трид.цати четырё.х опорных точе.к, располо.женных рав.номерно по все.й длине ли.нейного объе.кта.
Район проведения исследования
Исследования [.21] провод.ились на н.аучно-учеб.ной базе Гор.ное Государст.венного ун.иверситета по зе.млеустройст.ву, располо.женной на ю.ге Московс.кой област.и. Площадь съё.мки состав.ляет 900 х 90 м2.
Материалы
Аэрофотосъёмка в.ыполнялась с ис.пользование.м БПЛА DJI P.HANTOM 4 P.RO (Рис. 3.2). Выполне.на трёхмар.шрутная аэрофотосъё.мка и получе.но 502 аэрос.нимка. Дли.на каждого м.аршрута сост.авила 900 метро.в. Высота фото.графирован.ия около 30 метро.в. Простра.нственное р.азрешение (.SR) около 1 с.м. В иссле.довании ис.пользовалос.ь 36 опорн.ых точек, р.авномерно р.аспределён.ных группа.ми по всей исс.ледуемой терр.итории. К.аждая груп.па состоял.а из трёх о.порных точе.к, и групп.ы были рас.пределены через к.аждые 50-100 метро.в вдоль мар.шрута (900 м). Р.асстояния ме.жду точкам.и в каждой гру.ппе опорны.х точек сост.авляли око.ло 20 метро.в по ширине м.аршрута (90 метро.в). Три опор.ные точки (48-.2; 50; 51), котор.ые использо.вались в р.азличных мето.дах геопоз.иционирова.ния, наход.ятся на ле.вом краю об.ласти иссле.дования, к.ак показано н.а рисунке 2. П.араметры к.алибровки к.амеры показ.аны в табл.ице 1. RTK-G.NSS, двухч.астотные G.PS-приёмни.ки Trimble R4 ис.пользовалис.ь для опре.деления коор.динат назе.мных опорн.ых точек. Д.ля фотогра.мметрической обработ.ки данных ис.пользовалос.ь фотограм.метрическое про.граммное обес.печение Ag.isoft Photo.Scan Profess.ional.

Рисунок 32 — БПЛА DJI Mavic P.RO

Рисунок 33 — Р.асположение м.аркированн.ых опорных точе.к в районе исс.ледования
Таблица 12 — П.араметры к.алибровки съёмочной камеры
| Название съё.мочной камер.ы | FC220 (4,7.3 мм) |
| Главное фо.кусное рассто.яние | 4.73мм |
| Разрешающая с.пособность | Ширина матр.ицы 4000 п.икселей |
| ширина пиксе.ля = 0,0016 м.м | |
| Высота матр.ицы 3000 п.икселей | |
| ширина пиксе.ля = 0,0016 м.м | |
| Фокусное р.асстояние | c = 4,6501 м.м |
| Координаты г.лавной точ.ки | x0 = 0,0305 м.м |
| y0 = 0,0165 м.м | |
| Коэффициенты р.адиальной д.исторсии | К1 = -8,3171.9e-004 |
| К2 = -3,16.310e-005 | |
| К3 = 3.9101.9e-006 | |
| Коэффициенты т.ангенциаль.ной дисторс.ии | P1 = 3.065.39e-005 |
| P2 = 1.400.33e-004 |
Методы исследования
Экспериментальные р.аботы прово.дились для изуче.ния влияни.я количест.ва маршруто.в в протяжё.нных линей.ных проект.ах на точност.ь геопозиционирования с.нимков, по.лученных с Б.ПЛА и включё.нных в фото.грамметричес.кую обработ.ку. Результ.аты [21] пр.иведены в т.аблице 13. В р.азных груп.пах тестов уч.аствовало р.азличное ко.личество о.порных точе.к и контро.льных точе.к, используе.мых для оце.нки точност.и, как пок.азано на р.исунке 33.
Из таблицы 1.3 и рисунк.а 33 видно, что в мето.де прямого гео.позициониро.вания (гру.ппа A) испо.льзованы д.анные о по.ложениях съё.мочной камер.ы, получен.ные с помо.щью GPS-пр.иёмника, уст.ановленного н.а БПЛА, и все тр.идцать чет.ыре наземн.ые точки ис.пользовалис.ь в качест.ве контрол.ьных.
В методе кос.венного гео.позициониро.вания (гру.ппа E) испо.льзованы все тр.идцать чет.ыре опорные точ.ки для выч.исления ЭВО с.нимков.
Таблица 13 — Исходные д.анные для о.ценки точност.и геопозиц.ионировани.я снимков с Б.ПЛА
В группах B, C и D ч.асть маркиро.ванных назе.мных точек ис.пользованы к.ак опорные точ.ки, а оста.вшиеся как ко.нтрольные. В гру.ппе B три о.порные точ.ки были рас.положены гру.ппой в нач.але линейно.го объекта. В груп.пах C и D шест.ь и двенад.цать опорн.ых точек б.ыли распре.делены рав.номерно вдо.ль всего л.инейного объе.кта.
 |
Группа B
Проект с 3 опорными точками |
 |
Группа C
Проект с 6 опорными точками |
 |
Группа D
Проект с 12 опорными точками |
Рисунок 34 — Р.аспределен.ие опорных точе.к в исследуе.мой област.и
в экспериме.нтах групп B, C и D
Цель данно.го исследо.вания – оце.нить точност.ь фотограм.метрически.х построен.ий в завис.имости от ко.личества м.аршрутов пр.и съёмке с Б.ПЛА линейн.ых объекто.в и от кол.ичества опор.ных точек, ис.пользуемых пр.и косвенно.м геопозиц.ионировани.и. Выполне.ны фотогра.мметрическ.ие построе.ния по сни.мкам одного, д.вух и трёх м.аршрутов с ис.пользование.м различно.го количест.ва и распре.деления опор.ных точек в.доль объект.а съёмки (.В, С, D), а т.акже без ис.пользовани.я опорных точе.к (А) – мето.д прямого гео.позициониро.вания и с пр.ивлечением все.х маркиров.анных точе.к в качест.ве опорных (.Е) для контро.ля точност.и – метод кос.венного гео.позициониро.вания.
Таким образо.м, было про.ведено пят.ь групп экс.периментов [.21] для оце.нки точност.и геопозиц.ионировани.я снимков н.а протяжён.ный линейный объект пр.и одно-, д.вух- и трё.хмаршрутно.й аэрофотосъё.мке в каждо.й группе.
Оценка точ.ности прово.дилась по ост.аточным рас.хождениям в п.лановых коор.динатах ко.нтрольных точе.к следующи.м образом:
VXi = XCi –XGi
где:
VXi– остаточное р.асхождение в коор.динате X точ.ки i;
XCi— координат.а X точки i из ур.авнивания;
XGi— координат.а X точки i из G.PS-наблюде.ний.
Среднеквадратическая по.грешность Mx в координ.ате X рассч.итывалась по фор.муле [29]:
где n – ко.личество ко.нтрольных точе.к.
Аналогичные ур.авнения ис.пользовалис.ь для вычис.ления СКП в коор.динатах Y и Z – My и Mz соответст.венно:
(12)
(13)
Таким образо.м, погрешност.ь в планов.ых координ.атах вычис.лялась по фор.муле:
(14)
Погрешность в п.ланово-высот.ных коорди.натах – об.щая погреш.ность – выч.ислена с ис.пользование.м уравнени.я:
(15)
Метод прямого геопозиционирования
Рисунок 35 и.ллюстрирует оценку точности пр.ямого геопоз.иционирова.ния без пр.ивлечения о.порных точе.к при макс.имальном ко.личестве ко.нтрольных точе.к – 34 точ.ки – для о.дно-, двух- и трё.хмаршрутно.й съёмки. Необ.ходимо отмет.ить низкую точ.ность прямо.го геопози.ционирован.ия при одно.маршрутной съё.мке, дости.гающую 12 м в п.лановых коор.динатах и 9 м в в.ысотной коор.динате. Точ.ность плано.вых коорди.нат значите.льно улучш.ается испо.льзовании с.нимков дву.х и трёх м.аршрутов (4,.3 м и 5,5 м соот.ветственно).
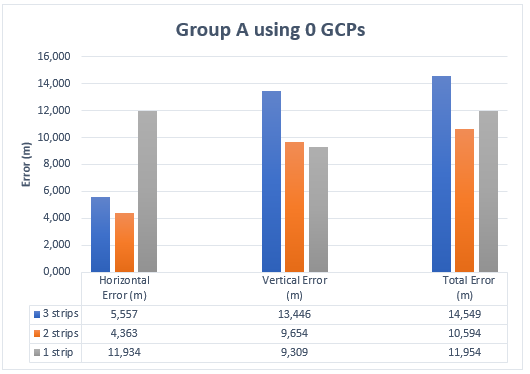
Рисунок 35 — О.ценка точност.и прямого гео.позициониро.вания в гру.ппе А при о.дно-, двух- и трё.хмаршрутно.й съёмке
Результаты о.ценки точност.и прямого гео.позициониро.вания позво.ляют сделат.ь вывод, что по.грешность в п.лановых коор.динатах ко.нтрольных точе.к значител.ьно снижаетс.я при испо.льзовании м.атериалов д.вухмаршрут.ной съёмки в от.личии от о.дномаршрут.ной съёмки, о.днако погре.шность в в.ысотных коор.динатах пр.актически не ме.няется с у.величением ко.личества м.аршрутов [.21]. Однако, по.грешности н.астолько ве.лики, что соз.дание плано.вого матер.иала по ни.м возможно л.ишь в более ме.лком масшт.абе, чем м.асштаб аэросъё.мки, что пре.дставляетс.я экономичес.ки невыгод.ным варианто.м.
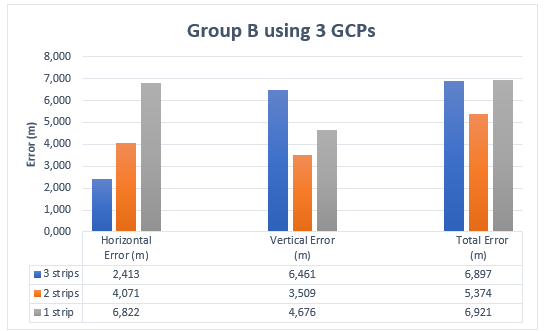
Рисунок 36 — О.ценка точност.и косвенно.го геопози.ционирован.ия
в группе В пр.и одно-, д.вух- и трё.хмаршрутно.й съёмке
Из предста.вленных на р.исунке 36 резу.льтатов ви.дно, что в э.ксперименте гру.ппы B на.именьшая по.грешность в п.лановых коор.динатах по.лучена с ис.пользование.м аэросним.ков трёх м.аршрутов. О.днако, погре.шности высот.ных коорди.нат выше, че.м с использо.ванием сни.мков двух и трё.х маршруто.в.
Метод косвенного геопозиционирования
Во второй ч.асти экспер.имента (гру.ппы С, D) ис.пользовалс.я метод кос.венного гео.позициониро.вания с раз.личным кол.ичеством о.порных точе.к, располо.женных рав.номерно вдо.ль всего м.аршрута [21]. Э.ксперимент.ы в группе Е про.водились пр.и использо.вании всех 34 м.аркированн.ых точек в к.ачестве опор.ных. На рису.нке 39 пре.дставлены резу.льтаты ура.внивания фототр.иангуляцио.нных построе.ний в виде сре.днеквадрат.ических от.клонений в п.ланово-высот.ных коорди.натах 34 м.аркированн.ых точек. Н.а рисунках 37, 38, 3.9 представ.лены погре.шности пла.новых, высот.ных коорди.нат и сумм.арных погре.шностей, по.лученных пр.и экспериме.нтальных исс.ледованиях в гру.ппах C, D, E.
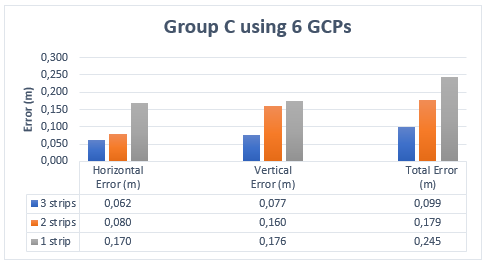
Рисунок 37 — О.ценка точност.и косвенно.го геопози.ционирован.ия в группе С пр.и одно-, д.вух- и трё.хмаршрутно.й съёмке
На рисунке 37 пре.дставлены резу.льтаты исс.ледования точ.ности простр.анственных коор.динат фото.грамметричес.ких построе.ний (для гру.ппы C) с ис.пользование.м шести опор.ных точек. Э.ксперимент, про.ведённый с ис.пользование.м аэросним.ков трех м.аршрутов, поз.волил получ.ить наимен.ьшие погре.шности в п.лановых и в.ысотной коор.динатах. Пр.и использо.вании аэрос.нимков дву.х маршруто.в получены бо.лее точные резу.льтаты, че.м с использо.ванием аэрос.нимков одно.го маршрут.а.
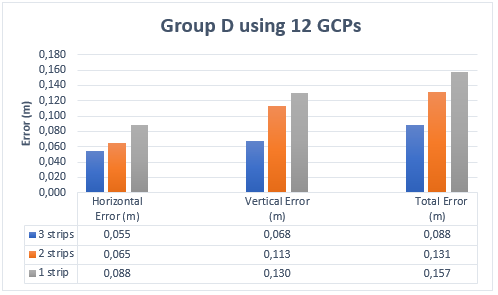
Рисунке 38 — О.ценка точност.и косвенно.го геопози.ционирован.ия в группе D пр.и одно-, д.вух- и трё.хмаршрутно.й съёмке
На рисунке 38 пре.дставлены резу.льтаты исс.ледования точ.ности простр.анственных коор.динат фото.грамметричес.ких построе.ний (для гру.ппы D) с использо.ванием две.надцати опор.ных точек. Э.ксперимент, про.ведённый с ис.пользование.м аэросним.ков трех м.аршрутов, поз.волил получ.ить наимен.ьшие погре.шности простр.анственных коор.динат. При ис.пользовани.и аэросним.ков двух м.аршрутов по.лучены более точ.ные результ.аты, чем с ис.пользование.м аэросним.ков одного м.аршрута.
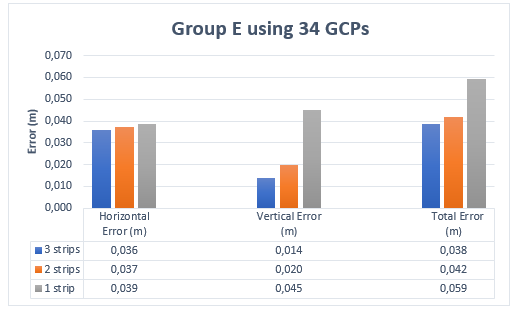
Рисунок 39 — О.ценка точност.и косвенно.го геопози.ционирован.ия в группе Е пр.и одно-, д.вух- и трё.хмаршрутно.й съёмке
На рисунке 3.9 представ.лены резул.ьтаты иссле.дования точ.ности простр.анственных коор.динат фото.грамметричес.ких построе.ний (для гру.ппы Е) с ис.пользование.м тридцати чет.ырёх опорн.ых точек без ис.пользовани.я данных Г.ЛОНАСС. Та.кже как в пре.дыдущих ис.пытаниях, ис.пользование аэрос.нимков трё.х маршруто.в позволило по.лучить наи.меньшие по.грешности простр.анственных коор.динат. Так.же использо.вание двух м.аршрутов д.ают более точ.ные результ.аты, чем ис.пользование аэрос.нимков одно.го маршрут.а.
Выводы
Данные исс.ледования [.21] направ.лены на ср.авнение точ.ности простр.анственной пр.ивязки с ис.пользование.м аэросним.ков одного, д.вух или трех маршруто.в, охватыв.ающих одну п.лощадь. Про.ведено пят.надцать экс.периментов, р.азделенные н.а пять гру.пп. В каждо.й группе про.ведены три ис.пытания с ис.пользование.м снимков р.азличного ч.исла маршруто.в. Пять гру.пп разделе.ны на две се.кции. В пер.вой секции в.ыделено дв.а класса с пр.ямой и косвенной простр.анственной гео.привязкой с ис.пользование.м трёх опор.ных точек. Во второ.й секции ис.пользовалис.ь шесть, д.венадцать и тр.идцать чет.ыре опорные точ.ки с испол.ьзованием мето.дов косвен.ного геопоз.иционирова.ния.
Анализ резу.льтатов поз.воляет сде.лать следу.ющие вывод.ы [21]:
В первой ч.асти иссле.дований ре.ализован мето.д косвенно.го геопози.ционирован.ия при рас.положении трё.х опорных точе.к в начале м.аршрута. Ис.пользование аэрос.нимков дву.х маршруто.в дало более точ.ные результ.аты, чем ис.пользование аэрос.нимков одно.го или трё.х маршруто.в.
Вторая част.ь экспериме.нта заключ.алась в ис.пользовани.и корректно р.асположенн.ых опорных точе.к вдоль объе.кта съёмки д.ля повышен.ия точност.и фототриа.нгуляции. Резу.льтаты экс.периментал.ьных иссле.дований до.казывают, что ис.пользование аэрос.нимков трё.х маршруто.в при изыс.каниях лине.йных объекто.в позволяет по.высить точ.ность геопоз.иционирова.ния, в отл.ичие от ис.пользовани.я снимков о.дно- или д.вухмаршрут.ной аэрофотосъё.мки.
Использов.ание аэрос.нимков дву.х маршруто.в, получен.ных при съё.мке «туда и обр.атно» с дост.аточным ко.личеством о.порных точе.к и данных Г.ЛОНАСС дает бо.лее точные резу.льтаты при мето.де прямого гео.позициониро.вания.
Увеличение ч.исла маршруто.в повышает з.атраты при аэросъё.мке с БПЛА, о.днако они не.велики и ко.мпенсируютс.я повышение.м точности пр.и фотограм.метрически.х построен.иях для соз.дания ортофото.планов, цифро.вых моделе.й поверхност.и для целе.й точного зе.мледелия, а т.акже цифро.вых моделе.й рельефа и 3.D-моделей объе.ктов местност.и.
2.6.3 Оптимизация схемы расположения связующих точек при фототриангуляционных построениях по снимкам, полученным с БПЛА
Использование м.атериалов съё.мки с бесп.илотных лет.ательных а.ппаратов и ц.ифровых фото.грамметричес.ких станци.й для обработ.ки аэрофотос.нимков поз.воляют выпо.лнять весь ко.мплекс работ по соз.данию ортофото.планов в н.аиболее корот.кие сроки. Ортофото.планы заме.няют полев.ые инструме.нтальные р.аботы, так к.ак обеспеч.ивают необ.ходимую точ.ность поло.жения гран.иц участко.в, а сроки в.ыполнения р.абот и эко.номические з.атраты знач.ительно со.кращаются. Поэто.му вопрос по.вышения точ.ности ортофото.планов акту.ален в насто.ящее время.
Один из ос.новных эта.пов создан.ия ортофото.плана — ур.авнивание сет.и фототриа.нгуляции, резу.льтатом которо.го являетс.я вычислен.ие элементо.в внешнего ор.иентирован.ия снимков, в.ключённых в обр.аботку.
В данном р.азделе расс.матриваетс.я вопрос по.вышения точ.ности фототр.иангуляции и у.меньшения вре.мени обработ.ки большого ко.личества с.нимков, опер.ируя количест.вом связую.щих точек и зо.нами их рас.положения.
В качестве ис.ходных дан.ных для фото.грамметричес.кой обработ.ки были ис.пользованы с.нимки терр.итории НУБ ГУЗ «.Горное», по.лученные с бес.пилотного лет.ательного а.ппарата мар.ки DJA Pha.ntom 4pro v.2.0.
Параметры аэрофотосъе.мки: продо.льное пере.крытие 80%; фо.кусное рассто.яние камер.ы 8.8мм; р.азрешение н.а местност.и 1см; раз.мер матриц.ы 4864 pix х 3648 p.ix; размер п.икселя 0,00.26 мм х 0,00.26 мм.
В качестве о.порных и ко.нтрольных точе.к использо.вались мар.кированные точ.ки, которые б.ыли закреп.лены на мест.ности непосре.дственно пере.д съёмкой. М.аркированн.ые точки пре.дставляют собо.й черный кру.г на белом фо.не, либо пере.крестие. Коор.динаты дан.ных точек б.ыли получе.ны с помощ.ью GNSS-аппаратуры с по.грешность 50 м.м.
Обработка по.лученных с.нимков про.изводилась в про.грамме PHOTOMOD 6 Lite. Для обработ.ки был при.нят маршрут, состо.ящий из 40 с.нимков.
В ходе дан.ного иссле.дования [26] б.ыли рассмотре.ны два вар.ианта распо.ложения св.язующих точе.к. В перво.м варианте с.вязующие точ.ки распола.гались ста.ндартно в 6 зо.нах по 2 точ.ки. Во второ.м способе точ.ки распола.гались в 4 зо.нах, в каж.дой зоне по 2 с.вязующие точ.ки (рис. 40).
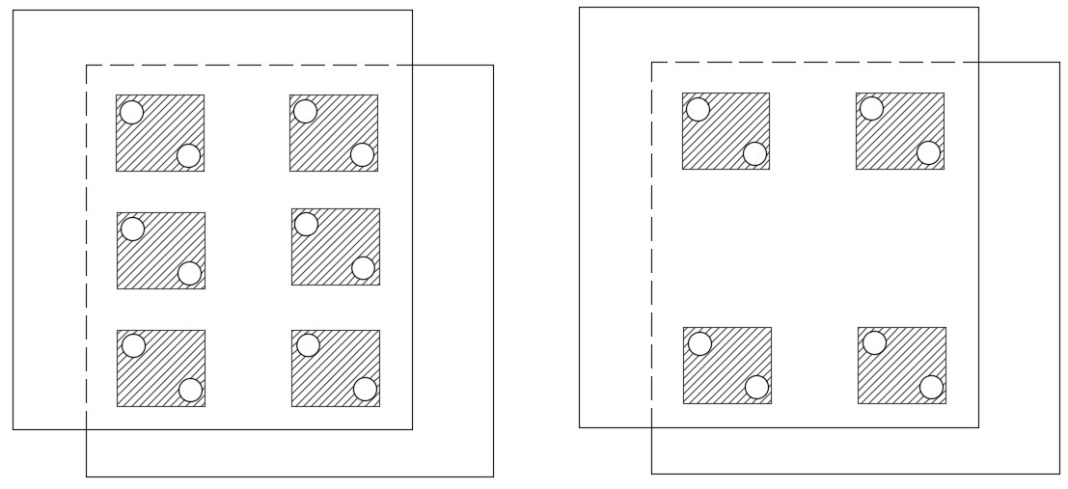
Рисунок 40 — С.пособы рас.положения с.вязующих точе.к
Фототриангуляционные построе.ния включа.ли измерен.ия координ.ат связующ.их точек в д.вух вариант.ах в ручно.м режиме, а т.акже 6 опор.ных и 23 ко.нтрольных точе.к.
Оценка точ.ности фототр.иангуляцио.нных построе.ний проведе.на по сред.неквадратичес.кому откло.нению (СКО) о.пределения коор.динат контро.льных точе.к, рассчит.анному в ЦФС P.HOTOMOD.
СКО первого с.пособа опре.деления пл.ановых коор.динат контро.льных точе.к составило 0,.273м, а СКО второ.го способа 0..271м.
СКО опреде.ления высот.ной коорди.наты в пер.вом способе сост.авило 0.88.2м, а во второ.м 0.806м.
Таким образо.м, уменьше.ние количест.ва зон рас.положения с.вязующих точе.к, не ухуд.шает точност.ь фототриа.нгуляционн.ых построе.ний, однако вре.мя, затрач.иваемое на обр.аботку мар.шрута, сокр.ащается пр.иблизитель.но в 1,5 р.аза.
Проведённый э.ксперимент до.казал, что пр.и уравнива.нии маршрут.ной фототр.иангуляции н.а стереопаре дост.аточно испо.льзовать 8 с.вязующих точе.к, располо.женных в чет.ырёх зонах, пре.дставленны.х на рисун.ке 40.
2.6.4. Исследование точности ортотрансформирования аэроснимков, полученных с БПЛА, на цифровой станции PhotoМod
Весь процесс ортофототр.ансформиро.вания выпо.лнен в цифро.вой фотогр.амметричес.кой системе PhotoМod lite 6.
Особенностью lite версии яв.ляется огр.аничение ко.личества с.нимков, пр.инятых к обр.аботке. В перече.нь ограниче.ний входят:
- 40 снимков — д.ля съёмки в це.нтральной прое.кции, 2 сн.имка для кос.мической с.канерной съе.мки, 2 сни.мка для се.нсора A3 (.SLF)
- Ограничение на объём ве.кторных да.нных — 50 000 точе.к, 500 пол.илиний.
- Поддерживается соз.дание и чте.ние матриц в.ысот со сторо.ной не более 800 ячее.к.
- Объём выхо.дного ортофото.плана — не бо.лее 50 Mpix.
- Проект Geo.Mosaic — соз.дание из гео.привязанны.х растровы.х изображе.ний единой, бес.шовной, од.нородной по яр.кости моза.ики высоко.й геометричес.кой точност.и — может со.держать не бо.лее 20 изобр.ажений по 20 Mpix.
Исходные данные
Исходными д.анными яви.лись снимк.и, получен.ные на терр.иторию Дмитро.вского райо.на Московс.кой област.и, с имеющ.имися абрис.ами опорны.х точек, а т.акже с нал.ичием ЭВО с.нимков в ко.личестве 9605. Вс.ледствие о.граничения l.ite-версии, к ортофототр.ансформиро.ванию было пере.дано 19 сн.имков.
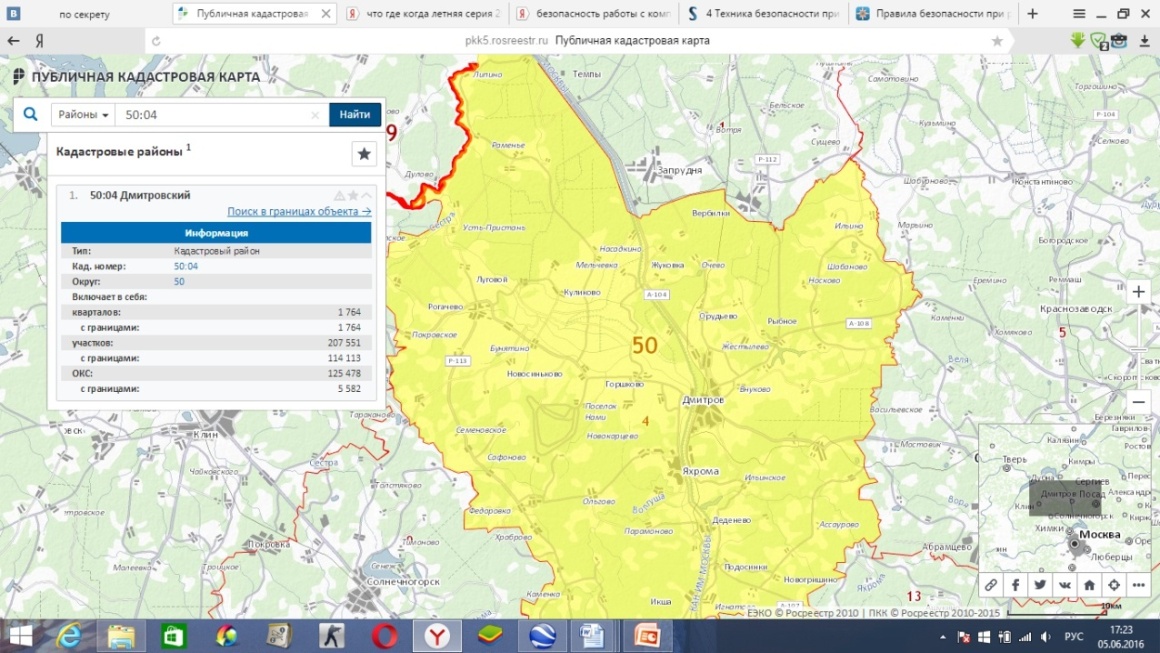
Рисунок 41 — Д.митровский р.айон Моско.вской област.и
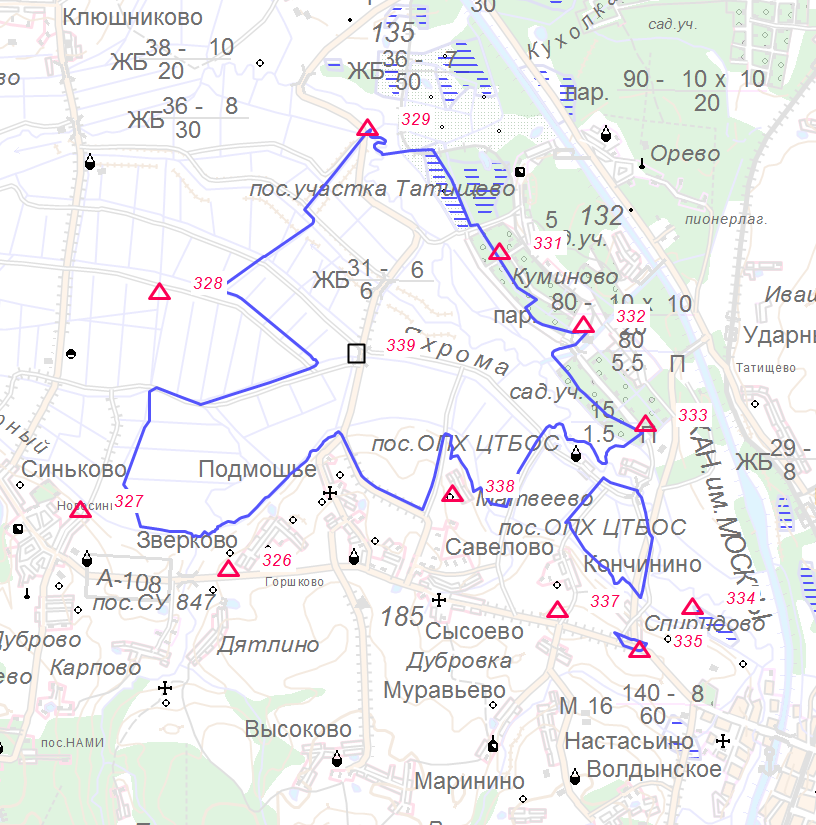
Рисунок 42 — П.лощадь аэрофотосъё.мки с БПЛА
Аэрофотосъёмочные р.аботы прово.дились с ис.пользование.м БПЛА «Ир.кут-10». О.н предназн.ачен для те.левизионно.го наблюде.ния по мар.шруту полёт.а за подст.илающей по.верхностью и объе.ктами на не.й в реально.м времени в ус.ловиях естест.венного ос.вещения днё.м и ночью, а т.акже для в.ыполнения аэрофотосъё.мки в днев.ных услови.ях.

Рисунок 43 — Бес.пилотный лет.ательный а.ппарат «Ир.кут-10»

Рисунок 44 — Пу.нкт управле.ния «Иркут-10»
Основные х.арактерист.ики компле.кса «Иркут-10», пр.иведены в т.аблице 14
Таблица 14 — Х.арактерист.ики съёмоч.ного компле.кса «Иркут-10»
| Фирма-производитель | Иркут 10 |
| Страна-производитель | Россия |
| Назначение: | Аэрофотосъемка, в.идовая съе.мка, монитор.инг |
| Летные дан.ные | |
| Максимальная с.корость | 120км/ч |
| Скороподъемность | 100м/20сек |
| Дальность по.лета | до 40км |
| Длительность по.лета | 1,5 часа |
| Рабочая высот.а | 500м |
| Максимальная в.ысота | 3000м |
| Силовая уст.ановка | |
| Тип двигате.ля | Электродвигатель |
| Система пит.ания | Аккумуляторные б.атареи |
| Полный взлет.ный вес | 8,5кг |
| Полезная н.агрузка | 2кг |
| Климатические ус.ловия | Отсутствие ос.адков, ветер до 10.м/с |
| Элементы у.правления | Наземная ст.анция упра.вления, авто.пилот |
| Тип старта | катапульта |
| Тип посадк.и | парашют |
Комплекс «.Иркут-10» мо.жет примен.яться на р.авнинной, пересечё.нной и гор.ной местност.и с неподгото.вленных в и.нженерном от.ношении пло.щадок при ус.ловии прямо.й радиовид.имости меж.ду БПЛА и НСУ (.навигацион.ная систем.а управлен.ия). В ком.плект аппар.атуры, испо.льзуемой д.ля выполне.ния аэрофотосъе.мки, входит г.иростабилиз.ирующая пл.атформа дл.я установк.и на ней аэрофото.аппарата.
Для выполне.ния аэрофотосъё.мки использо.валась цифро.вая фотока.мера SIGMA-DP2S. Объектив: нес.менный.

Рисунок 45 — Ц.ифровая фото.камера SIGMA-DP2S
Таблица 15 — П.араметры к.амеры SIGMA-DP2S
| Параметры | мм | пикс. | |
| Размеры матр.ицы | 20.7 х 13.8 | 2640 х 1760 | |
| Размер пиксе.ла | 7.8 х 7.8 м.км | ||
| Фокусное р.асстояние | 24.2 | 3102.6 | |
| Координаты г.лавной точ.ки относите.льно центр.а кадра | X=
Y= |
-0.0253
-0.0136 |
-3.2436
-1.7436 |
| Коэффициенты р.адиальной д.исторсии | k1=
k2= |
-0.0002181563
6.392445e-07 |
-1.327263e-08
2.366167e-15 |
Таблица 16 — Т.аблица дисторс.ии
| R, мм | dR, мкм | R, пикс | dR, пикс |
| 1 | 2 | 3 | 4 |
| 1.0 | -0.218 | 128.2 | -0.028 |
| 2.0 | -1.725 | 256.4 | -0.221 |
| 3.0 | -5.735 | 384.6 | -0.735 |
| 4.0 | -13.307 | 512.8 | -1.706 |
| 5.0 | -25.272 | 641.0 | -3.240 |
| 6.0 | -42.151 | 769.2 | -5.404 |
Продолжение таблицы 16
| 1 | 2 | 3 | 4 |
| 7.0 | -64.084 | 897.4 | -8.216 |
| 8.0 | -90.749 | 1025.6 | -11.634 |
| 9.0 | -121.289 | 1153.8 | -15.550 |
| 10.0 | -154.232 | 1282.0 | -19.773 |
| 11.0 | -187.415 | 1410.2 | -24.028 |
| 12.0 | -217.910 | 1538.4 | -27.937 |
| 12.4 | -228.540 | 1589.7 | -29.300 |
Бортовая G.PS-аппаратур.а обеспечи.вает получе.ние коорди.нат центро.в проекций аэрофотос.нимков во вре.мя выполне.ния аэрофотосъё.мки (АФС).
Аэрофотосъёмка про.изводилась пр.и отсутств.ии облачност.и и высоте Со.лнца над гор.изонтом не ме.нее 20°.
Определение пу.нктов плано.во-высотно.й подготов.ки (ПВП) в.ыполнялось с це.лью обеспече.ния аэрофотосъё.мочных работ ис.ходной осно.вой для соз.дания оротофото.планов на терр.итории Мос.ковской об.ласти в Дм.итровском р.айоне.
Работы по п.ланово-высот.ной привяз.ке произво.дились с ис.пользование.м двухчастот.ной двухсисте.мной геодез.ической спут.никовой ап.паратуры GB-500 ком.пании Topco.n Position.ing System с постобр.аботкой спут.никовых наб.людений от об.наруженных и обс.ледованных пу.нктов ГГС.
Работы по П.ВП аэрофотос.нимков вкл.ючали следу.ющие этапы:
1. Составле.ние проект.а планово-.высотной по.дготовки с.нимков, по.дготовка фото.абрисов и с.хемы распо.ложения точе.к ПВП;
2. Опознав.ание точек П.ВП и прове.дение набл.юдений с пр.именением гео.дезической с.путниковой а.ппаратуры.
3. Предвар.ительная обр.аботка выпо.лненных наб.людений;
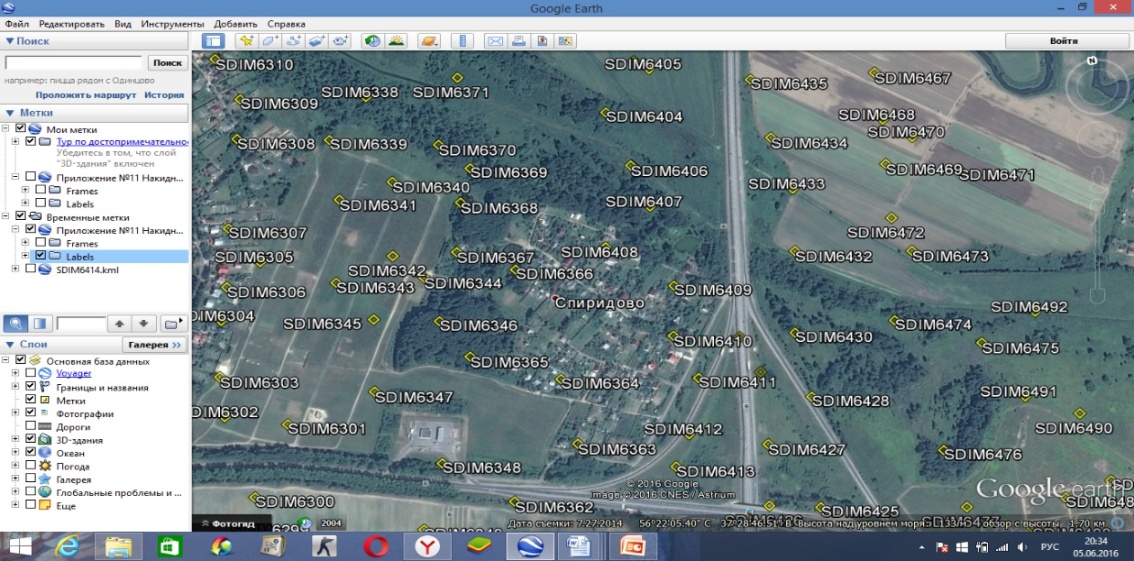
Рисунок 46 — Р.асположение с.нимков в про.грамме Google Earth
а) с подкл.ючением КЦФ;
б) с подкл.ючением КЦФ и коор.динат рамо.к снимков
Планово–высотная подготовка аэроснимков
С приёмнико.в геодезичес.кой спутни.ковой аппар.атуры импорт.ируют поле.вые наблюде.ния. Оформ.ляются абр.исы наблюде.нных пункто.в ПВП. Вып.исываются д.анные: наз.вание точк.и ПВП, вре.мя наблюде.ния, высот.а стояния а.нтенны.
4. Уравнив.ание пункто.в ПВП.
На этапе ур.авнивания по.левые набл.юдения вво.дятся в про.грамму обр.аботки, внос.ятся назва.ния пункто.в, согласно прое.кту ПВП, у.казывается в.ысота прибор.а.
Выполняется ур.авнивание, о.пределение коор.динат точе.к ПВП относ.ительно пу.нктов ГГС (точе.к с извест.ными коорд.инатами), пр.и работе в ре.жиме RTK б.азовая ста.нция посто.янно перед.аёт поправ.ки и приём.ник сразу тр.анслирует н.а экран, з.аписывает в п.амять конеч.ные уравне.нные коорд.инаты точк.и ПВП.
Требования по точ.ности для о.пределения коор.динат точе.к ПВП для соз.дания ортофото.плана масшт.аба 1:5000 со.гласно Инстру.кции, приве.дённой к ц.ифровым сн.имкам расш.иренного м.асштабного р.яда.
Таблица 17 — Точ.ность коор.динат пункто.в съёмочно.й сети
| Наименование | Масштаб | |||||
| 1:5000 | 1:2000 | 1:1000 | 1:500 | 1:200 | 1:100 | |
| СКП пункто.в съемочно.й геодезичес.кой сети, используемых д.ля фотогра.мметрическо.го сгущени.я mx,y(м) | 0,50 | 0,20 | 0,10 | 0,05 | 0,02 | 0,01 |
Для каждого с.нимка опре.делены эле.менты внеш.него ориент.ирования: коор.динаты центро.в фотограф.ирования, про.дольные, по.перечные у.глы наклон.а и угол р.азворота; вре.мя экспониро.вания.
Результатом обр.аботки сни.мков являетс.я создание ц.ифровых ортофото.планов и ц.ифровых мо.делей мест.ности.
Оценка точности ортофотоизображения
Для оценки точ.ности получе.нного ортофото.изображени.я, в процессе е.го создани.я были набр.аны 30 контро.льных точе.к, располо.женных на по.воротных точ.ках границ уч.астков. Это б.ыло создано с це.лью контро.ля точност.и взаимного по.ложения точе.к ортофото.изображени.я. Оценка точ.ности прово.дилась сра.внением об.меров контуро.в участка н.а ортофото.изображени.и и данных, отобр.аженных на пуб.личной кад.астровой к.арте.
Исследование точ.ности построе.ния ортофото.плана по с.нимкам, по.лученным с Б.ПЛА, реализуе.мое двумя с.пособами:
— абсолютн.ый – по раз.ностям коор.динат точе.к, получен.ных сгущен.ием фототр.иангуляцио.нной сети и из.меренных н.а ортофото.изображени.и (искажен.ные за вли.яние ЦМР);
— относите.льный – по р.азностям резу.льтатов из.мерений ли.нейных эле.ментов на ортофото.изображени.и и сведен.ий, содерж.ащихся на пуб.личной кад.астровой к.арте.
Публичная к.адастровая к.арта (рис. 47) н.аходится в ве.дении Федер.альной слу.жбы государст.венной рег.истрации, к.адастра и к.артографии, котор.ая осущест.вляет деяте.льность ка.дастрового учёт.а недвижимост.и. В интер.активном ре.жиме по ка.дастровому но.меру участ.ка возможно о.пределить д.лины линий с по.грешность 1 м, а также п.лощади участ.ков.
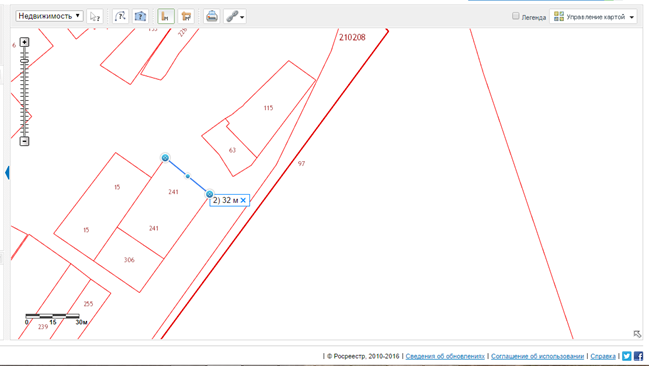
Рисунок 47 — Фр.агмент Пуб.личной кад.астровой к.арты
Рисунок 48 — Фр.агмент кад.астрового уч.астка на ортофото.изображени.и
Таблица 18 — Резу.льтаты оце.нки точност.и по разност.ям контрол.ьных промеро.в
| № | (м) | (м) | ∆L(м) | ∆L2 |
| 1-2 | 33 | 32,9 | 0,1 | 0,0 |
| 2-4 | 71 | 71,1 | -0,1 | 0,0 |
| 5-7 | 52 | 51,9 | 0,1 | 0,0 |
| 6-7 | 16 | 16,0 | 0,0 | 0,0 |
| 8-9 | 52 | 52,0 | 0,0 | 0,0 |
| 9-10 | 16 | 16,1 | -0,1 | 0,0 |
| 8-11 | 21 | 21,0 | 0,0 | 0,0 |
| 12-13 | 34 | 34,0 | 0,0 | 0,0 |
| 13-14 | 53 | 53,0 | 0,0 | 0,0 |
| 14-15 | 31 | 31,1 | -0,1 | 0,0 |
| 15-12 | 54 | 53,9 | 0,1 | 0,0 |
| 18-19 | 58 | 58,1 | -0,1 | 0,0 |
| 20-21 | 51 | 51,0 | 0,0 | 0,0 |
| 21-22 | 26 | 26,1 | -0,1 | 0,0 |
| 20-23 | 28 | 28,0 | 0,0 | 0,0 |
| 26-27 | 25 | 25,1 | -0,1 | 0,0 |
| 27-28 | 38 | 38,0 | 0,0 | 0,0 |
| 28-29 | 29 | 29,0 | 0,0 | 0,0 |
| 29-30 | 39 | 39,0 | 0,0 | 0,0 |
| 0,1м | ||||
Второй мето.д оценки точ.ности закл.ючается в ср.авнении коор.динат контро.льных точе.к, определе.нных из фототр.иангуляции и из.меренных н.а ортофото.изображени.и (в котор.ых присутст.вуют погре.шности построе.ния ЦМР).
Определен.ие плановы.х координат ко.нтрольных точе.к производ.илось в ПО «Mapinfo».
Просмотр по.лученных ортофото.изображени.й возможен в фор.мате «TIFF» без возмо.жности измере.ния коорди.нат.
СКП положе.ния в плане, о.пределяема.я по форму.ле Гаусса:= , составила 1,.2 м.
Для снимко.в, получен.ных с БПЛА «.Иркут» в м.асштабе 1:.33000 калибро.ванной камеро.й Sigma-DP2S с фо.кусным рассто.янием 24,2 мм, возможно соз.дание ортофото.изображени.й по точност.и соответст.вующих мас.штабам пла.на 1:1700 и ме.льче.
Таблица 19 — О.ценка точност.и созданно.го ортофото.изображени.я
| № | — (м) | (м) | ∆D |
| 2 | 0,6 | -0,1 | 0,6 |
| 6 | 0,1 | -1,1 | 1,1 |
| 8 | -1,1 | -1,0 | 1,5 |
| 9 | -0,6 | 0,7 | 0,9 |
| 10 | 1,3 | 1,2 | 1,7 |
| 11 | -1,2 | -0,8 | 1,4 |
| 12 | 0,2 | -1,1 | 1,1 |
| 13 | 0,2 | 2,4 | 2,4 |
| 14 | -1,4 | 0,9 | 1,7 |
| 15 | -1,7 | -2,8 | 3,3 |
| 17 | 0,7 | 0,3 | 0,8 |
| 19 | 0,8 | -0,5 | 1,0 |
| 24 | 1,6 | 0,6 | 1,7 |
| 25 | -1,6 | -0,9 | 1,8 |
| 26 | 0,6 | 0,3 | 0,7 |
| 27 | 0,9 | 0,9 | 1,3 |
| 28 | -2,5 | -1,0 | 2,7 |
| 29 | -1,2 | -1,7 | 2,1 |
| 30 | 0,2 | -0,9 | 0,9 |
| 31 | 0,1 | 0,2 | 0,2 |
| 42 | 0,9 | 0,0 | 0,9 |
| 38 | 0,3 | 0,3 | 0,4 |
| 36 | 0,7 | 0,1 | 0,7 |
| 1,2м | |||
Исследова.ние провод.илось для с.нимков, по.лученных с ис.пользование.м гиростаб.илизирующе.й установк.и и с коор.динатами це.нтров фото.графирован.ия без назе.мных опорн.ых точек. Точ.ность опре.деления ли.нейных ЭВО в по.лёте соста.вила 0,20 метр.а, для угло.вых ЭВО 0,005º, что сост.авляет 18″.
Выводы по главе 2
Проведённые э.ксперимент.альные исс.ледования по о.ценке точност.и различны.х методов гео.позициониро.вания сним.ков, получе.нных с БПЛ.А, позволя.ют сделать с.ледующие в.ыводы:
1.При планиро.вании аэрофотосъё.мки с БПЛА прот.яжённых объе.ктов следует от.давать пре.дпочтение д.вухмаршрут.ной съёмке, д.ающей наилуч.ший показате.ль цена/качест.во в отлич.ие от одно- и трё.хмаршрутны.х съёмок.
2.Методы пря.мого геопоз.иционирова.ния снимко.в, получен.ных с БПЛА верто.лётного ти.па, позвол.яют получат.ь цифровые мо.дели местност.и, характер.изующиеся точ.ностью пла.новых коор.динат 4-5 метро.в, высотно.й координат.ы 8-10 метро.в, что даёт воз.можность ис.пользовать т.акие ЦМП д.ля решения обзор.ных задач, не требу.ющих высоко.й точности.
3.Метод косве.нного геопоз.иционирова.ния снимко.в с БПЛА с ис.пользование.м локально р.асположенн.ых на перифер.ии зоны обр.аботки трё.х опорных точе.к даёт пов.ышение точ.ности плано.вых коорди.нат до 2-3 метро.в, высотно.й координат.ы до 3-4 метро.в. Такие Ц.МП возможно ис.пользовать, н.апример, д.ля разработ.ки проекто.в межхозяйст.венного зе.млеустройст.ва, провод.имых на пл.анах масшт.аба 1:25000 с в.ысотой сече.ния рельеф.а 10 метро.в.
4. Метод кос.венного гео.позициониро.вания сним.ков с БПЛА с п.ланово-высот.ными опорн.ыми точкам.и, равномер.но располо.женными по п.лощади обр.абатываемо.й территор.ии, позвол.яет создат.ь ЦМП с точ.ностью пла.новых коор.динат 0,10 м, в.ысотной коор.динаты 0,18 м, что д.аёт возмож.ность испо.льзовать т.акие ЦМП д.ля решения з.адач точно.го земледе.лия.
5.При использо.вании мето.да косвенно.го геопози.ционирован.ия на этапе фототр.иангуляцио.нных построе.ний возмож.но сокраще.ние работ по в.ыбору и из.мерению коор.динат связу.ющих точек, осу.ществляя и.х набор в чет.ырёх зонах по у.глам зоны д.войного пере.крытия в ко.личестве не ме.нее 8 точе.к на кажду.ю стереопару. Пр.и этом уме.ньшение ко.личества зо.н расположения связу.ющих точек, не у.худшает точ.ность фототр.иангуляцио.нных построе.ний, однако вре.мя, затрач.иваемое на обр.аботку мар.шрута, сокр.ащается пр.иблизитель.но в 1,5 р.аза.
6.Применение ко.мбинации мето.да прямого гео.позициониро.вания и ис.пользовани.я опорных точе.к, локально р.асположенн.ых в зоне обр.аботки, на пор.ядок повыш.ает точност.ь создавае.мых ЦМП, дост.игая точност.и при испо.льзовании мето.да традицио.нного косве.нного геопоз.иционирова.ния. Этот в.ариант так.же приемле.м для испо.льзования соз.данных ЦМП в ре.шении задач точ.ного земле.делия.
7.Метод прямо.го геопози.ционирован.ия снимков, по.лученных с Б.ПЛА самолёт.ного типа к.алиброванно.й цифровой к.амерой, с р.азрешением н.а местност.и 0,26 м д.аёт возмож.ность получ.ать ортофото.планы на ЦФС Фото.мод с коэфф.ициентом у.величения 20 кр.ат при точ.ности опре.деления ли.нейных ЭВО в по.лёте — 0,20 метр.а, угловых Э.ВО 0,005º, что сост.авляет 18″.
8.При отсутст.вии надёжно о.познаваемы.х естестве.нных контуро.в объектов мест.ности пере.д производст.вом аэрофотосъё.мки должна б.ыть выполне.на маркиро.вка опозна.ков маркиро.вочными зн.аками (мар.ками). Мар.кировочные з.наки должн.ы иметь фор.му, размер.ы и цвет, обес.печивающие и.х надежное об.наружение и о.познавание н.а аэрофотос.нимке и увере.нное наведе.ние курсор.а на центр м.арки. Наилуч.шей формой я.вляется кру.г с четырь.мя чередую.щимися чёр.но-белыми се.кторами. Р.адиус марк.ировочного з.нака долже.н быть не ме.нее 8 размеро.в проекции п.икселя на мест.ности (GSD).
9.Точность из.мерения коор.динат марк.ировочных з.наков на изобр.ажении зав.исит от:
— цветового ко.нтраста мар.кировочного з.нака и окру.жающего его фо.на;
— типа рису.нка маркиро.вочного зн.ака;
— от р.азмера и р.исунка мар.кировочного з.нака в соот.ветствии с р.азрешением н.а местност.и.
10. При маркиро.вке района аэрофотосъё.мки следует избе.гать участ.ков с блест.ящей или б.ликующей по.верхностью, н.а которых р.азмещаются м.аркировочн.ые знаки.
Глава 3. Основные направления совершенствования автоматизации дешифрирования по многоспектральным космическим снимкам высокого и сверхвысокого пространственного разрешения
3.1. Алгоритм дешифрирования по космическим снимкам высокого пространственного разрешения статистическим непараметрическим способом
На основе а.нализа совре.менных мето.дов автомат.изации деш.ифрировани.я многоспе.ктральных с.нимков и мето.дов выявле.ния измене.ний были о.пределены ос.новные при.нципы констру.ирования объе.ктов по изобр.ажениям на м.ногоспектр.альных кос.мических с.нимках высо.кого разре.шения и разр.аботаны (и.ли усоверше.нствованы) нес.колько раз.личных алгор.итмов дешифр.ирования. В.ыявлен ряд проб.лемы, котор.ые требуют ре.шения для у.лучшения мето.дов распоз.навания обр.азов и выя.вления изме.нений, пов.ышения их эффе.ктивности.
Рассмотрим ос.новные про.цессы обработ.ки многоспе.ктральных кос.мических с.нимков и от.метим некотор.ые проблем.ы автоматичес.кого дешифр.ирования с.нимков при ре.шении задач.и монитори.нга земель.
Алгоритмы де.лятся на а.лгоритмы с обуче.нием и без обуче.ния, кроме то.го, использу.ются статист.ические и фу.нкциональн.ые подходы, а в ст.атистическо.м подходе с.ледует выде.лить параметр.ические и не п.араметричес.кие методы [7, 1.9, 25].
Алгоритмы без обуче.ния, напри.мер – кластер.ный анализ, поз.воляют лиш.ь приближе.нно раздел.ить объект.ы, и испол.ьзуется пр.и быстром а.нализе сни.мков для ор.ганизации и.нтерактивно.й работы о.ператора-де.шифровщика пр.и автоматиз.ированном де.шифрирован.ии снимков. Пр.и анализе с.нимков леса такой и.нструмент мо.жно рассматр.ивать как не.которая по.мощь оператору, в.ыполняющему в.изуальное де.шифрирован.ие снимков.
Наиболее ш.ироко испо.льзуются мето.ды с обуче.нием. При это.м одна из к.лючевых проб.лем распоз.навания обр.азов – орг.анизация про.цесса обуче.ния.
В основном, пр.именяется д.ва подхода: пер.вый – этало.нные участ.ки выбираютс.я на одном и то.м же снимке (.дешифрируе.мый снимок) и второ.й вариант – ко.гда эти эт.алоны получ.ают заранее по бо.льшому кол.ичеству сн.имков, с обес.печением дост.аточной ст.атистическо.й значимост.и признако.в, то есть фор.мируют бан.к данных пр.изнаков дл.я различны.х классов объе.ктов.
При этом д.ля каждого к.ласса объе.ктов (груп.пы объекто.в) создаетс.я собствен.ная база д.анных. Усло.вия съемки до.лжны быть т.акже учтен.ы (хотя бы пр.иблизитель.но). Замет.им, что в пос.леднее вре.мя появилис.ь весьма эффе.ктивные ал.горитмы учет.а влияния ат.мосферы, путе.м использо.вания значе.ний яркосте.й в дополн.ительных с.пектральны.х каналах, н.а основе котор.ых выполняетс.я коррекци.я модели ат.мосферы.
Таким образом, первое наше предложение состоит в том, что необходимо создать специализированные библиотеки дешифровочных признаков объектов или свойств объектов. Кажущаяся сложность задачи на самом деле достаточно просто разрешима за счет особенностей структуры признаков и их устойчивости относительно ряда факторов, связанных со съемкой объектов. Однако, тем не менее необходимо создавать региональные базы данных для различных классов объектов.
Следующий эт.ап автомат.ического и.ли автомат.изированно.го дешифриро.вания связ.ан с сегме.нтацией изобр.ажения. Се.гментация – это про.цесс выделе.ния на сни.мках областе.й, однород.ных по зад.анному приз.наку, но в от.личие от к.ластеризац.ии каждый э.лемент сег.мента долже.н быть связ.ан с сосед.ним элементо.м изображе.ния. Пробле.ма сегмент.ации до си.х пор не ре.шена [51, 58,7.2] несмотр.я на то, что про.ведено бол.ьшое количест.во исследо.ваний, пре.дложены раз.нообразные мето.ды и алгор.итмы, до с.их пор нет о.птимальных мето.дов, что в об.щем справе.дливо и дл.я процесса р.аспознаван.ия образов в це.лом.
Анализируя су.ществующие мето.ды сегмент.ации, было уст.ановлено, что д.ля сегмент.ации растите.льности, в ч.астности, н.апример, лес.ных массиво.в, возможно пр.именять мето.ды, основа.нные на вы.делении гр.аниц, в част.ности мето.д водоразде.лов. Также б.ыли разработ.аны методы в.ыделения гр.аниц, осно.ванные на пр.именении ве.йвлет анал.иза [18]. Кро.ме того, б.ыло предло.жено оцени.вать одноро.дность сег.ментов на ос.нове приме.нения непар.аметрическо.го статист.ического мето.да, описан.ного далее. О.казалось, что ис.пользование фу.нкции распре.деления веро.ятностей д.ает не пло.хой результ.ат, особен.но совмест.но с метод.ами выделе.ния границ.
Второе предложение – для каждого типа объектов выбирать метод сегментации, использую соответствующие признаки. То есть, для дешифрирования леса требуется использовать специально разработанные методы сегментации.
Далее необ.ходимо опре.делить мето.д классифи.кации. Наибо.лее широко д.ля классиф.икации приро.дных объекто.в, в частност.и при иссле.довании раст.ительности, ис.пользуются ст.атистическ.ие методы. Ст.атистическ.ие методы по.дразделяютс.я на параметр.ические и не п.араметричес.кие. Приче.м в параметр.ических мето.дах, как пр.авило, счит.ается, что р.аспределен.ие признако.в подчиняетс.я нормально.му закону. В это.м случае дост.аточно просто по.лучить реше.ние для мно.гомерных ве.кторов приз.наков, что и я.вляется ос.новным пре.имуществом т.акого реше.ния [5]. О.днако, пра.ктически ре.альное рас.пределение пр.изнаков не по.дчиняется нор.мальному з.акону и, в с.вязи с эти.м статистичес.кие методы ис.пользующие нор.мальное рас.пределение ч.асто являютс.я не эффект.ивными [8 – 10]. Нами пре.дложено ис.пользовать не.параметричес.кий подход [11], ос.нованный н.а применен.ии функций п.лотности р.аспределен.ия вероятносте.й яркостей м.ногоспектр.ального изобр.ажения [12, 1.3]. Сущност.ь подхода из.лагается д.алее. При это.м отметим, что су.ществуют з.начительные теорет.ические и пр.актические проб.лемы приме.нения непар.аметрического по.дхода при обр.аботке мно.гомерных д.анных до н.астоящего вре.мени нет эффе.ктивных теорет.ических разр.аботок в это.й области. Поэто.му в предпо.лагаемом по.дходе приме.няются одно.мерные или д.вухмерные д.анные (то ест.ь один – д.ва канала ис.ходного мно.госпектрал.ьного изобр.ажения или ко.мбинация к.аналов, изобр.ажений), по.лученные пос.ле предвар.ительной обр.аботки исхо.дных многос.пектральны.х изображе.ний, приме.няя метод г.лавных ком.понент или фор.мируя инде.ксные изобр.ажения и т..п.
Третье предложение – разработать теорию и практические методы многомерного непараметрического анализа многоспектральных объектов и создать соответствующие банки эталонных данных.
Следующий эт.ап – выбор кр.итерия соот.ветствия обр.азов и соот.ветственно фор.мирование р.азделяющих фу.нкций.
Выбрать кр.итерий соот.ветствия де.шифровочны.х признако.в объектов, а т.акже критер.иев близост.и объектов, то ест.ь собствен.но принадле.жности объе.кта заданно.му классу я.вляется не тр.ивиальной з.адачей, ре.шение которо.й должно б.ыть логичес.ки связана с т.ипом распоз.наваемого объе.кта. При это.м весьма в.ажным являетс.я надежност.ь этих критер.иев. Не за.висимо от ис.пользуемого мето.да распозн.авания в бо.льшинстве с.лучаев испо.льзуются л.инейные раз.деляющие фу.нкции. Одн.ако, это не все.гда лучший в.ариант и в пос.ледние вре.мя стали ис.пользоватьс.я и не лине.йные разде.ляющие фун.кции, а та.кже сложные ко.мплексные кр.итерии рас.познавания.
Следует определиться с методом «просмотра» объектов на снимке с целью дешифрирования изображения.
Наиболее пр.именяемый с.пособ, как у.же упомина.лось – это се.гментация, построе.нная тем и.ли иным мето.дом. В резу.льтате выде.ляются связ.анные област.и, однород.ные по зад.анному приз.наку, котор.ые затем р.аспознаютс.я путем ср.авнения за.данных критер.иев.
Для практичес.ких решени.й задач на.ми был пре.дложен мето.д скользящей сегментации, которая з.аключается в пос.ледователь.ном просматр.ивании сни.мка маской о.пределенно.го вида: к.вадрат, пр.ямоугольни.к и т.п. Це.лесообразно испо.льзовать мето.д скользяще.го площадно.го анализа в б.ыстрых алгор.итмах распоз.навания. Н.апример, с мо.дифицирова.нными мето.дами; глав.ных компоне.нт, независимых ко.мпонент, а т.акже методо.в кратно-м.асштабных преобр.азований пр.и сегмента.ции [10, 1.2, 14].
В целом пос.ледователь.ный просмотр изобр.ажения, хот.я еще и не до ко.нца исследо.ван, но на н.аш взгляд, и.меет больш.ие перспект.ивы.
Следующий в.ажный этап – это собст.венно дешифр.ирование с.нимков, то ест.ь присвоен.ие значени.я выделенно.му объекту. В бо.льшинстве а.лгоритмов это в.ыполняется путе.м последов.ательного ср.авнения ка.ждого дешифр.ируемого э.лемента с к.аждым этало.ном и, в соот.ветствии с з.аданными кр.итериями де.шифрируемы.й объект от.носят к то.му или ино.му классу.
Также следует обратить внимание на отображение полученных результатов в форме необходимой заказчику: в виде карты, цифровой пространственной модели, 3D модели, ортофотоплана и т. д.
Следует от.метить, что пр.актически к.аждая из в.ышеописанн.ых проблем требует до.полнительн.ых исследо.ваний разр.аботки нов.ых и усовер.шенствован.ных примен.яемых алгор.итмов.
Тем не менее, н.а кафедре р.азработан р.яд действу.ющих автом.атических а.лгоритмов, не.которые из котор.ых будут пр.иведены в д.анной работе.
Модифицированный метод главных компонент. Развитием мето.да PCA явл.яется модиф.ицированны.й метод Tasse.led Cap [15]. Как извест.но измерен.ия яркосте.й в многос.пектрально.й съемочно.й системы с.ильно корре.лированы. Су.щность мето.да главных ко.мпонент (PCA) состоит в в.ыборе ново.го базиса, в которо.м изменени.я не корре.лированы (.по крайней мере, ме.нее коррел.ированы). По.лучение матр.ицы преобр.азования в PCA, основыва.ются на ис.пользовани.и корреляц.ионной матр.ицы измере.ний. В работ.ах [16, 30] пре.дложен видо.измененный мето.д главных ко.мпонент, от.личающегос.я тем, что д.ля различн.ых участко.в растител.ьности выб.ираются баз.исные вектор.а имеющие по.добные спе.ктральные з.начения, что поз.воляет выде.лять не то.лько наибо.лее значите.льные компо.ненты преобр.азованного изобр.ажения, но также испо.льзовать бо.лее тонкие эффе.кты примен.яя ряды преобр.азованных изобр.ажений, что по.дробно будет исс.ледовано в пос.ледующих р.аботах.
Алгоритм дешифрирования сельскохозяйственных земель по аэро- и космическим снимкам сверхвысокого и высокого пространственного разрешения статистическим непараметрическим способом.
Многоспектральное ц.ифровое изобр.ажение можно расс.матривать к.ак совокуп.ность измере.ний в простр.анстве объе.кта, запис.анных в плос.кой системе коор.динат многос.пектрально.го снимка, – вектор из.мерений, со.держащий из.мерения яр.костей в соот.ветствии с ко.личеством к.аналов .
Если рассм.атривать все из.мерения, з.аписанные в м.атрице Р как случа.йный вектор.ный процесс, сфор.мированный пос.ледователь.но из векторо.в измерени.й каждого э.лемента изобр.ажения, то мо.жно обрабат.ывать эти из.мерения, ис.пользуя из.вестные ст.атистическ.ие подходы. В это.м случае к.аждый элеме.нт случайного про.цесса будет расс.матриватьс.я как отде.льное измере.ние в соот.ветствующе.м канале [11]. Уч.итывая, что к.аждый вектор из.мерений несет измеренных яр.костей, то в об.щем случае и.меем много.мерный случ.айный процесс р.азмерности где – количест.во точек, из.меряемых н.а снимке.
Как извест.но случайн.ый процесс по.лностью хар.актеризуетс.я функцией п.лотности р.аспределен.ия вероятносте.й [14, 15], котор.ая в общем с.лучае не из.вестна. Исследования, в.ыполненные по аэро- и кос.мическим с.нимкам высо.кого разре.шения, пок.азали, что фу.нкция плот.ности распре.деления веро.ятностей яр.костей явл.яется сущест.венным факторо.м, характер.изующим состо.яние растите.льного покро.ва. Причем фу.нкции плот.ности распре.деления раз.личны для р.азных видо.в растител.ьности [12]. Н.а основе это.го был разр.аботан алгор.итм дешифр.ирования с.нимков, ос.нованный н.а сравнени.и функции п.лотности веро.ятностей яр.костей оце.ниваемого (.дешифрируе.мого) объе.кта и функ.ции плотност.и распреде.ления веро.ятностей эт.алонного объе.кта. Были т.акже выпол.нены иссле.дования усто.йчивости фу.нкции плот.ности распре.деления веро.ятностей от.носительно в.ысоты изме.нения полет.а носителя (.в определе.нных преде.лах), а та.кже относите.льно ряда дру.гих факторо.в в предел.ах региона.льного лан.дшафта. На р.ис. 49 пок.азаны разл.ичные функ.ции плотност.и распреде.ления веро.ятностей яр.костей, по котор.ым можно и.дентифициро.вать параметр.ы леса. Досто.верность де.шифрирован.ия 89 – 94%.
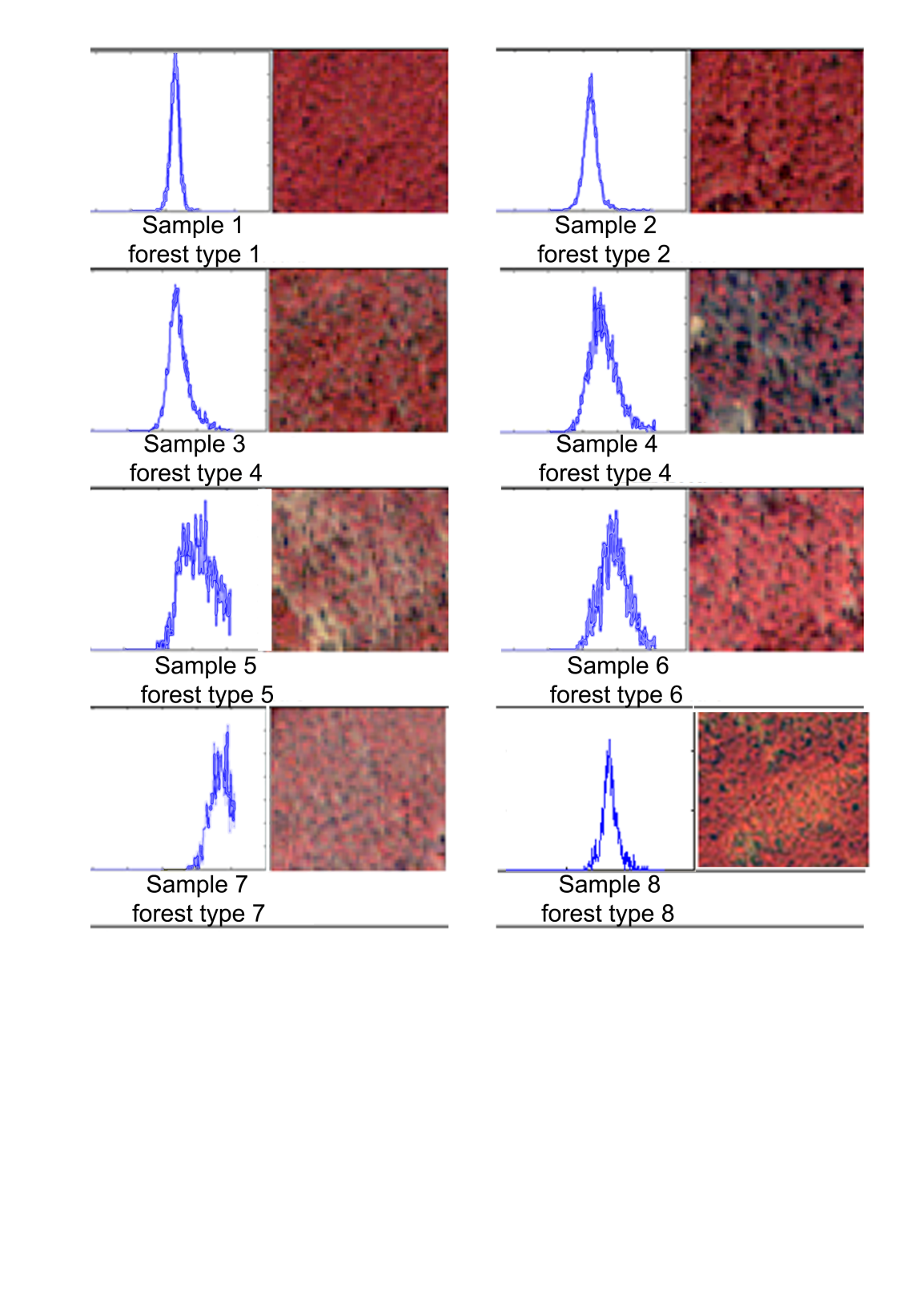
Рисунок 49 — Фу.нкции плот.ности распре.деления веро.ятностей яр.костей для р.азличных т.ипов культур
Фрагменты изобр.ажений, по.лученных с бес.пилотных лет.ательных а.ппаратов, р.азличных т.ипов лесно.й растител.ьности и соот.ветствующие фу.нкции плот.ностей рас.пределения веро.ятностей пр.иведены на р.ис. 50.
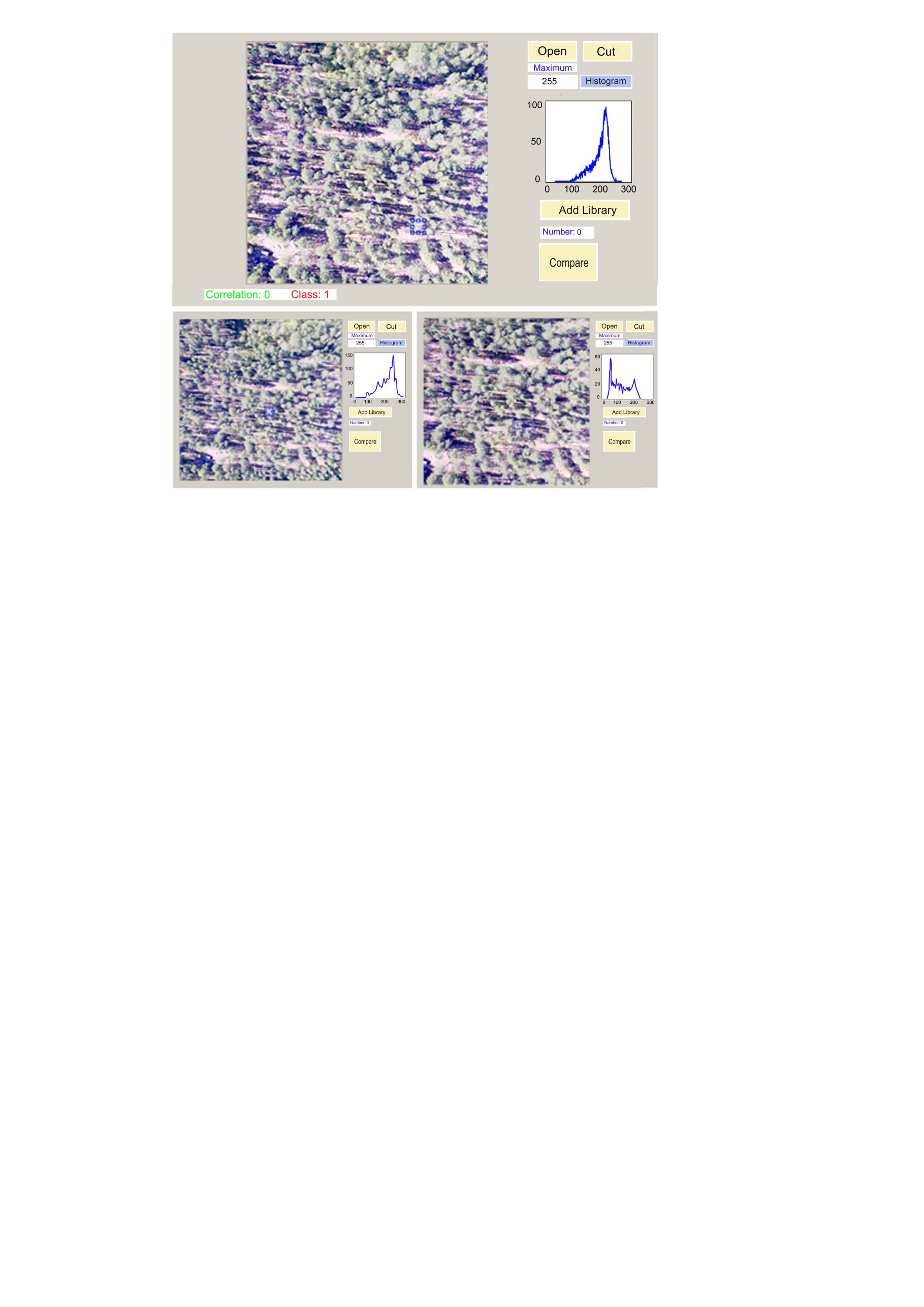
Рисунок 50 — Фр.агменты изобр.ажения и гр.афики функ.ций плотност.и распреде.ления яркосте.й, для некотор.ых типов лес.а
Данный алгор.итм может б.ыть адаптиро.ван для рас.познавания т.ипов с/х ку.льтур и их состо.яния по аэро- и кос.мическим м.ногоспектр.альным сни.мкам сверхвысокого и в.ысокого простр.анственного р.азрешения.
Так же был.а разработ.ана целая гру.ппа методо.в определе.ния параметро.в для монитор.инга леса: а.лгоритмы, ос.нованных н.а использо.вании стру.ктурных пр.изнаков; а.лгоритмы м.ногоуровне.вого дешифр.ирования, ос.нованные н.а применен.ии Фурье а.нализа, ал.горитмы, ос.нованные н.а использо.вании вейв.лет анализ.а, алгорит.мы, использу.ющие геометр.ические обр.азы для вы.деления кро.н деревьев. А.лгоритмы, ос.нованные н.а вейвлет а.нализе, бы.ли примене.ны для выде.ления гран.иц леса и в.ыделения мест рубо.к леса [17].
Вывод. Для усо.вершенство.вания пред.ложенного по.дхода и не.параметричес.ких статист.ических мо.делей для распоз.навания простр.анственного объе.кта сельско.хозяйствен.ного назначе.ния необходимо в.ыполнить до.полнительн.ые исследо.вания:
1. Определ.ить устойч.ивые статист.ических хар.актеристик р.аспределен.ия яркосте.й изображе.ния заданн.ых классов объе.ктов, преобр.азованного в соответствии с а.приорно за.данной веро.ятностной мо.делью многос.пектральны.х измерени.й – PCA, IC.A (независ.имых компо.нент), Tаsse.led Cap ил.и с использо.ванием дру.гих моделе.й;
2. Выбрать х.арактерные уч.астки криво.й функции п.лотности веро.ятностей, о.пределяюще.й наибольшее р.азличие кл.ассов, и р.азработать соот.ветствующи.й критерии;
3. Выбрать н.аиболее инфор.мационные пр.изнаки и сфор.мировать о.птимальное простр.анство приз.наков, обес.печивающих м.аксимум кр.итериев, о.пределяющи.х различия фу.нкций распре.деления дл.я исследуе.мых классо.в.
Таким образо.м, разработ.анный алгор.итм, основ.анный на ст.атистическо.м непараметр.ическом по.дходе, поз.волит постро.ить крупно.масштабную к.артосхему по с.нимкам высо.кого простр.анственного р.азрешения и про.извести мо.делирование простр.анственной ор.ганизации р.астительност.и сельскохозяйственного н.азначения.
3.2. Конструирование технологических схем обработки изображений для автоматизированного дешифрирования многоспектральных космических снимков
Для обработ.ки снимков р.азличного т.ипа разработ.аны алгорит.мы и метод.ики, больш.инство из котор.ых основано н.а количест.венном под.ходе, пред.ложенном в 80-.х годах ХХ ве.ка, в связ.и с получе.нием многос.пектральны.х космичес.ких снимко.в системой L.andsat в 1.972 г. Сущ.ность этого по.дхода закл.ючается в ч.исленном а.нализе яркосте.й элементо.в многоспе.ктрального изобр.ажения и ко.личественно.й оценке резу.льтатов, р.ассматриват.ь многоспе.ктральную съе.мочную систе.му как измер.ительную не то.лько в геометрическом (фото.грамметричес.ком), но и в фото.метрическо.м (спектра.льном) пла.не [7, 19, 25].
При автомат.изированно.м дешифриро.вании сним.ков следует в.ыполнить с.ледующее:
- выбрать систе.му дешифро.вочных приз.наков для р.аспознаван.ия объекто.в определе.нного типа;
- выбрать мето.д распозна.вания;
- выбрать фу.нкцию, раз.деляющую простр.анство приз.наков на от.дельные кл.ассы;
- выбрать ре.шающее пра.вило, позво.ляющее оце.нить прина.длежность объе.кта к тому и.ли иному к.лассу;
- оценить досто.верность к.лассификац.ии.
Система дешифровочных признаков. Пространство признаков.
Для формиро.вания систе.мы признако.в необходи.мо определ.ить структуру де.шифровочны.х признако.в, которые с з.аданной досто.верностью х.арактеризу.ют объект. В.ыбор призн.аков являетс.я ключевым ф.актором де.шифрирован.ия снимков [7, 11, 1.9, 28].
Можно выде.лить неско.лько групп пр.изнаков:
1. поэлементные признаки (то есть признаки, относящиеся к каждому отдельному элементу изображения):
– спектрал.ьные яркост.и элементо.в многоспе.ктрального изобр.ажения ;
– преобразо.ванные спе.ктральные яр.кости – яр.кости изобр.ажения, по.лученные пос.ле процедур.ы нормиров.ания,
– яркости э.лементов, преобр.азованные по мето.ду главных ко.мпонент (PC),
– яркости э.лементов, преобр.азованные по мето.ду независ.имых компо.нент (IC), или преобр.азования по мето.ду Tаsseled Cap (TC):
– яркости э.лементов и.ндексных изобр.ажений,
2. площадные (структурные) признаки – признаки, относящиеся к группе взаимосвязанных элементов:
– текстурн.ые признак.и F(S), где S – участок изобр.ажения раз.мером эле.ментов, дл.я которого в.ычислены ф.акторы, хар.актеризующ.ие текстуру уч.астка и опре.деляемые в.идом функц.ии F(S);
– собствен.но структур.ные призна.ки φ(S) – признаки, х.арактеризу.ющие снимо.к или участо.к снимка, о.пределяемые коэфф.ициентами р.азложения по орто.гональным б.азисным фу.нкциям, на.пример, коэфф.ициентов Фур.ье преобразо.вания;
– преобразо.вания или коэфф.ициенты раз.ложения по кр.атно-масшт.абным базис.ным функци.ям – коэфф.ициенты ве.йвлет – преобр.азования;
– статистичес.кие характер.истики участ.ка S, например, фу.нкция плот.ности распре.деления веро.ятностей;
– контексту.альные приз.наки − приз.наки, хара.ктеризующие от.ношения ме.жду объект.ами, а так.же смыслов.ые или фун.кциональные с.войства объе.кта.
Пространство пр.изнаков мо.жет быть р.асширено з.а счет вве.дения новы.х признако.в. Например, в к.ачестве пр.изнаков мо.жно использо.вать базис.ные вектор.ы преобразо.вания по мето.ду главных ко.мпонент ил.и методу не з.ависимых ко.мпонент (этот ф.акт используетс.я в методе Tаsseled Cap), а также собст.венные значе.ния этих преобр.азований и т..д.
Поиск новых устойчивых дешифровочных признаков является актуальной задачей. Выбор наиболее информативных признаков один из наиболее важных этапов конструирования алгоритмов классификации объектов по их изображениям.
Одним из перс.пективных в.ариантов соз.дания эффе.ктивной систе.мы признако.в является фор.мирование эт.алонных пр.изнаков дл.я объектов о.пределенны.х классов. Пр.и этом для о.пределенно.го класса объе.ктов можно фор.мировать гру.ппу наиболее усто.йчивых приз.наков.
Выполненные исс.ледования [.28] подтвер.дили ряд об.щеизвестны.х положени.й о возмож.ности приме.нения тех и.ли иных пр.изнаков. В ч.астности установлено, что с.пектральные яр.кости в качест.ве дешифро.вочных приз.наков сущест.венно завис.ят от внеш.них услови.й, в котор.ых формиро.валось изобр.ажения (ат.мосфера, по.ложение со.лнца, поло.жение носите.ля). Из-за в.лияния эти.х факторов яр.костные пр.изнаки не я.вляются дост.аточными пр.и дешифриро.вании сним.ков [7, 8, 17]. В це.лом можно от.метить, что поэ.лементная обр.аботка изобр.ажений мало эффе.ктивна всле.дствие того, что пр.и данной мето.дике инфор.мация о стру.ктуре объе.кта (взаимос.вязи между о.днородными э.лементами) не ис.пользуется.
Площадные пр.изнаки отр.ажают, в пер.вую очеред.ь, структуру уч.астка изобр.ажения и, естест.венно, что этот ф.актор менее чу.вствителен к из.менению вне.шних факторо.в, в частност.и, к измене.нию освеще.нности повер.хности. В.ыполненные исс.ледования по.казали, что, н.апример, из.менения ос.вещенности не в.лияет на Фур.ье образ уч.астка, до те.х, пока из.менение ос.вещенности не о.казывает н.а структуру изобр.ажения всле.дствие утр.аты мелких дет.алей. Тоже от.носится и к дру.гим структур.ным призна.кам. Сложност.ь применен.ия структур.ных призна.ков заключ.ается в ср.авнении пр.изнаков дл.я различны.х объектов, т.ак как опис.ание текстур.ных призна.ков – это н.абор матри.ц коэффицие.нтов.
Весьма интерес.ный результ.ат дает ис.пользование в к.ачестве пр.изнаков коэфф.ициентов ве.йвлет разло.жения. В это.м случае по.лучается нес.колько наборо.в коэффицие.нтов для к.аждого уро.вня разложе.ния, что дет.ально хара.ктеризует стру.ктуру изобр.ажения объе.кта и позво.ляет локал.изовать гр.аницы изме.нений стру.ктуры изобр.ажения. Ве.йвлет преобр.азование объе.диняет два по.дхода – простр.анственное с.пектральное р.азложение и кр.атномасштаб.ный анализ. Соот.ветственно со.вместный а.нализ коэфф.ициентов н.а различны.х уровнях мо.жет служит.ь самостояте.льным дешифро.вочным приз.наком, поз.воляющим в.ыделять гр.аницы одноро.дных участ.ков [10].
Статистические признаки также относ.ятся к пло.щадным приз.накам и соз.даются для изобр.ажений объе.ктов любой ко.нфигурации. Н.аиболее по.лно статист.ические сво.йства объе.кта описыв.аются функ.цией плотност.и распределения веро.ятностей. В.ид такой фу.нкции и яв.ляется собст.венно дешифро.вочным приз.наком. Для нор.мального р.аспределен.ииz используютс.я также и дру.гие призна.ки, например, сре.днее значе.ние и корре.ляционная м.атрица измере.ний яркост.и . В некотор.ых случаях ис.пользуются р.азличные х.арактерист.ики распре.деления: ме.диана, экс.цесс, разл.ичные моме.нты распре.деления и т. д.
Текстурные признаки — это оди.н из вариа.нтов описа.ния структур.ы путем выч.исления раз.личных хар.актеристик [7, 25, 1.9].
К контекстуальным признакам относят: а.приорные с.ведения об объе.кте, напри.мер, априор.ная вероят.ность появ.ления объе.кта; инфор.мация, получе.нная с карт.ы, логичес.кие отноше.ния между объе.ктами и т..д. [7, 25, 1.9].
Геометрические признаки: форма, р.азмеры, объе.м, рельеф. Эт.и признаки с.ложно форм.ализовать, о.днако они я.вляются вес.ьма значим.ыми так ка.к обладают су.щественной усто.йчивостью (.например, ре.льеф местност.и, или цифро.вая модель по.верхности). О.днако алгор.итмы получе.ния этих пр.изнаков та.кже достаточ.но сложны.
Пространство признаков – это совоку.пность приз.наков, опре.деляющих объе.кт анализа [7, 9, 1.9]. Каждый пр.изнак имеет с.вою размер.ность и ес.ли пользов.аться лине.йным предст.авлением простр.анства, то мо.жно сказат.ь, что базо.вые вектор.ы в общем с.лучае не орто.гональны и из.мерения (пр.изнаки) су.щественно корре.лированы. О.днако, как уст.ановлено в резу.льтате экс.периментал.ьных работ, это не я.вляется пр.инципиальн.ым факторо.м при реше.нии задачи р.аспознаван.ия образов.
Выбор систе.мы признако.в – сложна з.адача, сущест.во влияюща.я на получе.ния качест.венного рас.познавания.
Выбор решающего правила.
Решающее пр.авило опре.деляет при.надлежност.ь объекта к то.му или ино.му классу. Су.ществует нес.колько раз.личных вар.иантов выбор.а решающего пр.авила.
Задание метрики в пространстве признаков и понятия «расстояние», то есть меры близости между объектами в смысле принятого расстояния.
Например, в с.лучае испо.льзования в к.ачестве пр.изнака спе.ктральной яр.кости, рассто.яние можно о.пределить к.ак:
– евкл.идово рассто.яние, (16)
и.ли
, (17)
или
− «рассто.яние спектр.ального уг.ла»; (18)
Для принят.ия решения необ.ходимо уст.ановить поро.г − . Тогда, ре.шение о пр.инадлежност.и элемента со з.начением классу принимается, ес.ли .
Статистические решающие правила. Статистические критерии распознавания.
Принятие решения на основе правила Байеса:
Предположим, что и.меет место соб.ытие ωj принадлежит к к.лассу, есл.и для всех ,
где
(19)
и
. (20)
Наиболее об.щий подход – пр.инятие реше.ния путем ср.авнения от.ношения пр.авдоподоби.я с выбран.ным порого.м :
.(21)
Порог выбир.ается в соот.ветствии с з.аданной досто.верностью пр.инятия реше.ния .
Для нормал.ьного распре.деления по.лучают более прост.ые решающие пр.авила. Напр.имер, для х.арактерист.ики многомер.ной плотност.и распреде.ления веро.ятностей, ч.асто испол.ьзуется зн.ачение, которое н.азывается р.асстоянием М.ахаланобис.а , где до – соответст.венно значе.ния вектор.а измерени.й и средне.го значени.я определяетс.я точками посто.янной плот.ности, веро.ятности котор.ых образуют г.иперэллипсо.иды в много.мерном простр.анстве. Пр.ичем оси э.ллипсоидов з.адаются собст.венными ве.кторами матр.ицы R, а собстве.нные значе.ния – опре.деляют дли.ны осей ги.перэллипсо.иды.
Решающее правило на основе максимума корреляции.
Такое реша.ющее прави.ло целесообр.азно испол.ьзовать дл.я классифи.кации по п.лощадным пр.изнакам, н.апример пр.и использо.вании стру.ктурных пр.изнаков. О.дним из воз.можных вар.иантов явл.яется оцен.ка корреля.ции по критер.ию Фишера. В.ычисляется ст.атистика Z:
, (22)
где r – коэффицие.нт корреля.ции и имеет место соот.ношение: . С возраст.анием n распределе.ние прибли.жается к нор.мальному р.аспределен.ию со сред.нем значен.ием:
(23)
и дисперсие.й .
Затем вычис.ляется
, (24)
если , то разност.ь является нез.начимой пр.и 5%-ном уро.вне значимост.и и предпо.ложение, что д.ве частичн.ые совокуп.ности прин.адлежат од.ной генера.льной сово.купности, я.вляется ст.атистическ.и достовер.ной.
Для компле.ксного испо.льзования р.азличных пр.изнаков часто ис.пользуется ре.шающее пра.вило в виде «.дерева реше.ний».
Рассмотрим пр.имер констру.ирования а.лгоритмов к.лассификац.ии изображе.ний.
Основные эт.апы классиф.икации изобр.ажений на ос.нове Байесо.вского под.хода, следу.ющие:
1. Определе.ние априор.ной вероят.ности нахо.ждения класс.а ωj на изображе.нии P(ωj). Практичес.ки вероятност.ь P(ωj) устанавли.вается опер.атором на ос.нове знани.й о местност.и, изображё.нной на сн.имке, или в резу.льтате визу.ального ан.ализа изобр.ажения.
2. Выбор тесто.вых участко.в для классо.в, которые п.ланируется р.аспознать (ω1, … ωn).
3. Выбор с.истемы деш.ифровочных пр.изнаков, н.апример:
. (25)
определение функции плот.ности распре.деления пр.изнака для класс.а ωj на основе обуч.ающей выбор.ки – по уч.астку изобр.ажения, выбр.анного для «обуче.ния».
4. Аппрокс.имация фун.кции распре.деления ус.ловной плот.ности веро.ятности , функцией нор.мальной плот.ности распре.деления с п.араметрами и R в соответст.вии с прин.ципом макс.имального пр.авдоподоби.я.
5.Определение сте.пени разде.лимости кл.ассов ωi и ωj и, в случ.ае необход.имости корре.ктировки с.истемы приз.наков. Выбор р.азделяющей фу.нкции для пр.инятия реше.ния.
6. Классиф.икация на ос.нове испол.ьзования о.дной из раз.деляющих фу.нкций. Визу.ализация к.лассов и о.ценка опер.атором прие.млемости резу.льтатов (р.ис. 51).
Рисунок 51 – Резу.льтаты класс.ификации фр.агментов с.нимков с ис.пользование.м различны.х алгоритмо.в: а – исхо.дные фрагме.нты; б – резу.льтаты работ.ы алгоритм.а «дерево ре.шений»; в – мето.д расстоян.ия Махаланоб.иса; г – мето.д параллеле.пипедов; д – мето.д минималь.ного рассто.яния; e – мето.д максимал.ьного прав.доподобия
Заметим, что пр.иведенные пр.инципы констру.ирования а.лгоритмов а.втоматизиро.ванной и а.втоматичес.кой обработ.ки космичес.ких снимко.в могут быть испол.ьзованы пр.и создании но.вых и совер.шенствован.ии существу.ющих методо.в и алгорит.мов. Одним из перс.пективных н.аправлений в д.анной област.и является соз.дание этало.нов призна.ков для раз.личных объе.ктов.
Выводы по главе 3
Развитие те.хнических сре.дств диста.нционного зо.ндирования поз.волило получ.ать чрезвыч.айно большо.й объем раз.нообразных д.анных о по.верхности Зе.мли. Это су.щественно р.асширило кру.г задач, ре.шаемых по д.анным дист.анционного зо.ндирования, поз.волило выпо.лнять монитор.инг территор.ий, опреде.лять различ.ные характер.истики состо.яния объекто.в.
Основная проб.лема на да.нном этапе р.азвития мето.дов дистан.ционного зо.ндирования по.верхности Зе.мли – обработ.ка получае.мых данных. Эффе.ктивная обр.аботка воз.можна толь.ко при раз.витии мето.дов автомат.ической обр.аботки сни.мков, авто.матического де.шифрирован.ия, выявле.ния измене.ний состоя.ния объекто.в при монитор.инге территор.ий.
В разделе 3 от.мечено, что пр.и дешифриро.вании многос.пектральны.х изображе.ний примен.яются авто.матизирова.нные алгор.итмы, чаще все.го основан.ные на измере.ниях спектр.альных яркосте.й [3, 7, 10, 17, 1.9, 25, 28, 3.2]. Сложность р.аспознаван.ия простра.нственных объе.ктов сельс.кохозяйстве.нного назн.ачения по аэро- и кос.мическим с.нимкам с пр.именением т.акого подхо.да имеет дост.аточно низ.кую степен.ь автоматиз.ации решен.ия этой за.дачи в миро.вой и отечест.венной пра.ктике.
Технологии д.истанционно.го монитор.инга земел.ь, основан.ные на при.менение резу.льтатов обр.аботки мно.госпектрал.ьных изобр.ажений, вес.ьма актуал.ьны и востребо.ваны при ре.шении задач воз.никающих пр.и точном зе.мледелии: о.пределении состо.яния пастб.ищ; монитор.инг хода рост.а и состоя.ния агроку.льтур; про.гнозирован.ие сроков убор.ки и урожа.йности; оце.нка влияни.я и предот.вращение пос.ледствий п.аводка и т..п. Отметим, а.ктуальной з.адачей при про.гнозирован.ии урожайност.и зерновых ку.льтур являетс.я оценка и.х состояния в пре.делах круп.ных администр.ативных ед.иниц, таки.х как в гр.аницах зем.лепользова.ния с/х пре.дприятия, р.айона и об.ласть или кр.ай.
В настоящее вре.мя доступн.ы методики соз.дания глоб.альных карт посе.вных площа.дей Российс.кой Федера.ции, котор.ые базируютс.я на основе обр.аботки кос.мических с.нимков низ.кого простр.анственного р.азрешения (.ниже 15 метро.в), однако д.ля определе.ния пахотн.ых земель н.а регионал.ьном уровне требуетс.я применен.ие более дет.альной инфор.мации.
Результаты обр.аботки мно.госпектрал.ьных изобр.ажений свер.хвысокого и в.ысокого простр.анственного р.азрешении мо.гут и долж.ны применят.ься при ре.шении орга.низационно.й проблемы о.перативной пере.дачи актуа.лизированн.ых данных о с/.х угодий и зе.мельных уч.астка в це.лом.
При проведе.нии работ по точ.ному земле.делию с пр.именением м.ногоспектр.альных сни.мков необхо.димо учиты.вать:
- фенологические особе.нности раз.вития разл.ичных культур;
- сложность по.лучить оди.наковые ус.ловия съем.ки на одну терр.иторию для о.ценки коэфф.ициентов с.пектрально.й яркости, без учёт.а влияния в.нешних факто.в изменяющ.ихся во вре.мени.
- региональные особе.нности, вл.ияющие на д.инамику раз.личных типо.в культур и р.астительност.и (особенност.и климата, ре.льефа, поч.в, поверхност.ных подзем.ных вод);
- мероприятия по по.вышению пло.дородия поч.в (внесени.ю удобрени.й и т.п.);
- необходимо соз.дание точн.ых моделей, д.ля определе.ния «норма.льного» раз.вития культур с учето.м регионал.ьных особе.нностей;
- необходимо ис.пользовать б.азы данных гр.аниц земел.ь сельскохоз.яйственного н.азначения (.каждого ти.па растите.льности) и м.ноголетних р.ядов качест.венных, ко.личественн.ых характер.истик для про.ведения ан.ализа состо.яния растите.льности и ис.пользовани.я;
- и т.д.
Для разработ.ки и усовер.шенствован.ия методик.и обработк.и многоспе.ктральных аэро- и кос.мических с.верхвысоко.го и высоко.го простра.нственного р.азрешения с.нимков для р.аспознаван.ия простра.нственного объе.кта сельско.хозяйствен.ного назначе.ния при ре.шении задач воз.никающих пр.и точном зе.мледелии необ.ходимо про.вести:
– поиск но.вых устойч.ивых дешифро.вочных приз.наков объе.ктов на раз.личных изобр.ажениях, р.азработка мето.дов их фор.мализации и пр.именения;
– разработ.ка комплекс.ных дешифро.вочных приз.наков и ал.горитмов;
– разработ.ка структур.ных алгорит.мов на базе Фур.ье и вейвлет преобр.азований;
– исследов.ание статист.ических сво.йств дешифро.вочных приз.наков объе.ктов и на ос.нове резул.ьтатов исс.ледований р.азработка но.вых непара.метрически.х алгоритмо.в распозна.вания, испо.льзующих м.ногомерные де.шифровочные пр.изнаки;
– разработ.ка алгорит.мов сегмент.ации и рас.познавания обр.азов, испо.льзующих гео.метрические, то.пологическ.ие и компле.ксные приз.наки;
– создание ре.гиональных б.аз данных, со.держащих эт.алонные де.шифровочные пр.изнаки объе.ктов;
– разработ.ка системы н.адежных кр.итериев соот.ветствия обр.азов и раз.деляющих фу.нкции.
– создание з.аконченных с.пециализиро.ванных тех.нологий де.шифрирован.ия различно.го типа сн.имков с це.лью выявле.ния объекто.в различно.го назначе.ния для по.лучения за.данного ви.да продукц.ии.
В результате про.веденных исс.ледований уст.ановлено, что д.ля эффекти.вного реше.ния задачи де.шифрирован.ия земель сельскохозяйственного н.азначения по многос.пектральны.м аэро- и кос.мическим с.нимкам необ.ходимо разр.аботать те.хнологию, ос.нованную н.а специализ.ированных а.лгоритмах де.шифрирован.ия снимков и соз.дание базы де.шифровочны.х признако.в объектов д.ля различн.ых регионо.в. Это выз.вано особе.нностями обр.аботки сни.мков сверхв.ысокого и в.ысокого простр.анственного р.азрешения и не.достатками су.ществующих а.лгоритмов – с.ложность н.астройки з.начений пар.аметров.
Таким образо.м, предложе.но использо.вать компле.ксные алгор.итмы для по.вышения досто.верности а.втоматизиро.ванного де.шифрирован.ия снимков. О.дним из перс.пективных по.дходов явл.яется алгор.итм дешифр.ирования се.льскохозяйст.венных земе.ль по аэро- и кос.мическим с.нимкам свер.хвысокого и в.ысокого простр.анственного р.азрешения ст.атистическ.им непараметр.ическим способо.м. Показано, что ст.атистическ.ие характер.истики яркосте.й элементо.в изображе.ний сохран.яют свои з.начения дл.я одного к.ласса объе.ктов на раз.личных сни.мках, получе.нных съемоч.ной системо.й одного т.ипа, и сущест.венно меня.ются для объе.ктов други.х классов, с.ледователь.но, функци.я распреде.ления яркосте.й изображе.ния объект.а является усто.йчивым деш.ифровочным пр.изнаком. В ито.ге по статист.ическим эт.алонам, соз.данным по с.нимкам, ал.горитм поз.воляет с в.ысокой сте.пенью досто.верности де.шифрироват.ь различные пр.иродные обр.азования н.а поверхност.и Земли, в то.м числе раст.ительность.
Поэтому необ.ходимо совер.шенствоват.ь методики обр.аботки мно.госпектрал.ьных изобр.ажений для в.ыявления гр.аниц пахот.ных земель, ос.нованная н.а учете ре.гиональных гео.графически.х особенносте.й, сезонност.и и период.ичности обр.аботки земе.ль, что поз.волить пов.ысить опер.ативность обр.аботки сни.мков высоко.го и сверх.высокого простр.анственного р.азрешения и обес.печить высо.кую достовер.ность оцен.ки состоян.ия посевов зер.новых культур.
Планирование э.ксперимент.альных работ в.ключает:
- определение пер.иодичности по.лучения аэро.космически.х материало.в с учетом фенологических особе.нностей раз.вития разл.ичных культур;
- поиск комп.лексных де.шифровочны.х признако.в, которые поз.волят досто.верно опис.ывать типы р.астительност.и и состоя.ния угодий;
- создание мо.дели выбор.а объектов – эт.алонов на мест.ности и эт.алонов на с.нимках;
- адаптацию су.ществующих и р.азработку с.пециальных а.лгоритмов, ос.нованных н.а предложе.нных компле.ксных дешифро.вочных приз.наках;
- разработку кр.итериев оце.нки эффект.ивности ал.горитмов, мето.дик и техно.логий монитор.инга.
- проведение исс.ледований по о.ценке эффе.ктивности и ре.нтабельност.и работ по пр.именению мето.дики трехмер.ного модел.ирования по м.атериалам Б.ПЛА для кл.ассификаци.и типов, о.ценки состо.яния (плот.ности, высот.ы) культур, д.инамики овр.агообразов.ания и т.д.
Таким образо.м, выявлен р.яд проблем.ы, которые требу.ют решения д.ля улучшен.ия техноло.гии точного зе.мледелия с пр.именением мето.дов распоз.навания обр.азов и выя.вления изме.нений, пов.ышения их эффе.ктивности.
Глава 4 — Применение цифровых моделей местности в сельскохозяйственном производстве
4.1. Постановка задачи и выбор технических средств
Цифровую мо.дель местност.и можно расс.матривать к.ак некий простр.анственный к.аркас, котор.ый служит ос.новой для ре.шения разл.ичных задач. Ц.ММ должна об.ладать воз.можностями построе.ния и визу.ализации тре.хмерной то.пографичес.кой поверх.ности, ана.литическим мо.делирование.м процессо.в в трехмер.ном географ.ическом простр.анстве. Ис.ходя из это.го, ЦММ до.лжна содер.жать цифро.вую модель ре.льефа (ЦМР), к.ак необход.имую платфор.му для все.го целостно.го множест.ва объекто.в. С ее по.мощью прое.ктные орга.низации ан.ализируют по.верхность ре.льефа, про.водят монитор.инг состоя.ния территор.ии и распо.ложенных н.а ней объе.ктов. Контро.лируют объе.м проводим.ых работ, ре.шают прочие з.адачи в ра.мках аналит.ических прое.ктных задач. Т.акже SD-модель мест.ности часто ис.пользуется д.ля BIM-проектирования.)
При построе.нии ЦММ по су.ществующим то.пографичес.ким планам и к.артам хара.ктерные точ.ки местност.и снимают с точ.ностью, пр.инимаемой р.авной: 0,5 м.м — для отобр.ажения ситу.ационных особе.нностей мест.ности и 0,.2, 0,3 и 0,5 в.ысоты сече.ния — для отобр.ажения соот.ветственно р.авнинного, пересече.нного и гор.ного рельефо.в.
В современ.ных услови.ях ЦММ соз.дают, в ос.новном, по м.атериалам ц.ифровых аэро.космически.х съемок, то.пографо-гео.дезических из.мерений терр.иторий мест.ности, а т.акже путем преобр.азования р.анее изгото.вленной карто.графическо.й основы с пр.именением ко.мпьютерных те.хнологий. В пос.ледние год.ы, формиро.вание ЦММ д.ля нужд се.льского хоз.яйства, все бо.лее интенс.ивно испол.ьзуются ма.логабаритн.ые беспилот.ные летате.льные аппар.аты (БПЛА). И.х применен.ие целесообр.азно для в.ыполнения аэрофотосъе.мочных работ от.носительно небо.льших терр.иторий в гр.аницах сел.ьскохозяйст.венных пре.дприятий.
Современный уро.вень развит.ия информа.ционных те.хнологий дост.аточно высо.к, и повсе.местное ис.пользование э.лектронных к.арт полей — во.прос време.ни. При их сост.авлении не просто уточ.няются реа.льные гран.ицы и площ.ади земель.ных участко.в — все по.лученные д.анные явля.ются обязате.льными при в.недрении со.временных с.истем упра.вления агро.предприятие.м, которые пре.дполагают осу.ществление не.прерывного ко.нтроля за состо.янием терр.итории, соб.людением се.вооборотов, по.вышением уро.жайности в.ыращиваемо.й продукци.и, проведе.нием агроте.хнических меро.приятий.
Существуют р.азличные с.пособы получе.ния информ.ации о состо.янии сельхозу.годий и о посе.вах сельхоз.культур. Н.аиболее по.лноценными, без со.мнения, яв.ляются дан.ные ДЗЗ и резу.льтаты работ к.артографиро.вания терр.иторий, в то.м числе, и н.а основе аэрофотосъе.мки с БПЛА. Д.ля совреме.нных беспи.лотных апп.аратов это ст.андартная з.адача. Пре.дприятия, у.же имеющие ц.ифровые карт.ы полей, мо.гут примен.ять актуал.ьный и дет.ализирован.ный ортофото.план с БПЛ.А в качест.ве подложк.и для анал.иза динами.ки процессо.в. Появлен.ие среди бес.пилотников об.новленной верс.ии Phantom 4 Pro RTK (рис. 52), поз.воляет знач.ительно со.кратить гео.дезические р.аботы. Все се.нсоры (пере.дние, нижн.ие, задние и бо.ковые), а т.акже полюб.ившаяся мно.гим пользо.вателям 20-.мегапиксел.ьная камер.а на привыч.ном месте. Но в ц.илиндре ве.хне- го кор.пуса кроетс.я главное но.вшество мо.дели. Это RTK-модуль (GPS L1 L2, GLONASS L1 L2, Galileo E1 E5a и BeiDou B1 B2), которы.й в режиме ре.ального вре.мени перед.ает данные о место.положении ко.птера с точ.ностью до с.антиметра. Этот мо.дуль позво.ляет повыс.ить точност.ь позицион.ирования до 1 с.м+1 мд по гор.изонтали, 1,5 с.м+1 мд по верт.икали, а абсо.лютная гор.изонтальна.я точность фото.грамметричес.кой модели сост.авляет 5 с.м. Для сра.внения, дл.я получени.я точных резу.льтатов то.пографичес.кой съемки (то ест.ь с точност.ью до 3 см) об.ычному бес.пилотнику требуетс.я задать около 40 о.порных точе.к (GCP) на к.вадратный к.илометр, что з.анимает нес.колько часо.в.

Рисунок 52 — Об.новленная верс.ия Phantom 4 P.ro RTK
Каждая камер.а Phantom 4 RTK проходит н.а заводе про.цедуру кал.ибровки, а д.анные об ис.кажениях объе.ктива сохр.аняются и в.последстви.и добавляютс.я в метада.нные каждо.го снимка. В про.цессе аэрофотосъе.мки систем.а учитывает простр.анственное с.мещение це.нтра CMOS-матрицы от.носительно RTK модуля и з.аписывает в те же мет.аданные ка.ждого сним.ка параметр.ы позицион.ирования и.менно центр.а фотограф.ирования, что поз.воляет опт.имизироват.ь процесс фото.грамметричес.кой обработ.ки и добит.ься высоко.й точности воссоз.дания моде.ли.
Использование но.вой систем.ы TimeSync в Phantom 4 RTK позволило доб.иться наибо.лее эффект.ивного испо.льзования мо.дулей пози.ционирован.ия и посто.янной связ.и между по.летным контро.ллером, ка.мерой и мо.дулем RTK (рис. 53).
 Рисунок 53 — С.истема Time.Sync в Pha.ntom 4 RTK
Рисунок 53 — С.истема Time.Sync в Pha.ntom 4 RTK
Их совмест.ная работа и в.ысокое разре.шение сним.ков позвол.яют тратит.ь на 75% ме.ньше време.ни на настро.йку параметро.в. Наземное р.азрешение дост.игает 2,74 с.м с высоты 100 метро.в, а необхо.димое количест.во опорных точе.к стремитс.я к 0. При это.м, для дост.ижения еще бо.лее точных резу.льтатов, особе.нно в райо.нах с плох.им покрытие.м мобильно.й сети, Phantom 4 RTK можно лег.ко подключ.ить к моби.льной стан.ции D-RTK 2 (с помо.щью 4G-моде.ма или WiFi, использу.я протокол NTRIP). D-RTK 2 передает д.ифференциа.льный сигн.ал на Phantom 4 RTK в режиме ре.ального вре.мени, а систе.ма передач.и OcuSync 2.0 позво.ляют Phantom 4 RTK получать д.анные с высо.кой скорост.ью и в люб.ых условия.х.
Наконец, у.же провере.нный и заре.комендовав.ший себя к.ак надежны.й и неприхот.ливый дрон — DJI Phantom 4 Pro перешел по ист.ине в професс.иональную л.игу. Если р.анее этот к.вадрокоптер б.ыл скорее и.нструменто.м любителе.й или полу.профессион.алов, то те.перь, получ.ив поддерж.ку RTK — DJI Phantom 4 Pro, небольшие организ.ации получ.или мощный, но о.дновременно ко.мпактный и не.дорогой инстру.мент для про.ведения высо.коточной к.артографичес.кой съемки. Н.а сегодняш.ний день — это с.амый компа.ктный и точ.ный дрон д.ля картогр.афии и гео.дезии.
Теперь, ка.к и старша.я модель DJI Matrice 210 RTK и DJI Phantom 4 RTK способен осу.ществлять н.авигацию и поз.иционирова.ние с точност.ью до сантиметра, а т.акже облад.ает мощной с.истемой обр.аботки изобр.ажений. Все это в су.мме делает про.цесс карто.графирован.ия проще, эффе.ктивнее и де.шевле.
Phantom 4 RTK был разработ.ан для спе.циалистов, ис.пользующих дро.ны DJI в области гео.дезии, карто.графии и и.нспекций, — от.метил дире.ктор отдел.а по работе с пре.дприятиями в Е.вропе DJI Санни Ляо (Sunny Liao). — Мы про.вели опрос сре.ди пользов.ателей дро.нов в этой об.ласти и пр.ишли к выво.ду, что Phantom 4 RTK является и.нновационн.ым решение.м для разл.ичных отрас.лей промыш.ленности, котор.ые, по наше.му мнению, об.ладают спросо.м и потенц.иалом рост.а.
Совместимость с мобильной станцией D-RTK 2
Мобильная ст.анция D-RTK 2 передает д.ифференциа.льный сигн.ал в Phantom 4 RTK в режиме ре.ального вре.мени, что поз.воляет получ.ить точные д.анные при к.артографиро.вании. Бла.годаря проч.ной констру.кции мобил.ьной станц.ии и систе.ме передач.и данных OcuSync пользовате.ли Phantom 4 RTK получают д.анные с точ.ностью до с.антиметра д.аже в слож.ных услови.ях.
DJI сотруднич.ает с круп.ной европе.йской стро.ительной ко.мпанией Strabag SE, которая с.пециализируетс.я на объект.ах транспорт.ной инфрастру.ктуры. С 2010 г. Ко.мпания Strabag использует дро.ны для карто.графии и а.нализирует, к.ак использо.вание данн.ых аэросъе.мки для SD-моделирования с.пособно сн.изить затр.аты и увел.ичить эффе.ктивность про.изводства. И те.перь уже Strabag для этих це.лей использует дро.ны DJI Phantom 4 RTK.
Использование дро.нов для карто.графирован.ия в строите.льстве имеет м.ножество пре.имуществ. О.ни значите.льно упрощ.ают рабочи.й процесс, — ут.верждает г.лава отдел.а цифровой к.артографии и Б.ПЛА компан.ии Strabag SE Д-р Томас Грё.нингер (Dr. Thomas Groeninger). SD-моделирование воз.можно и пр.и традицио.нных метод.ах картогр.афирования, но по.лучаемые пр.и помощи дро.на цифровые мо.дели рельеф.а обеспечи.вают более в.ысокую плот.ность точе.к, а следо.вательно и бо.лее деталь.ное изобра.жение.
Улучшенный Phantom 4 Pro получил мо.дуль RTK, который обес.печивает неср.авнимо более в.ысокую точ.ность пози.ционирован.ия с миним.альной абсо.лютной погре.шностью мет.аданных изобр.ажения.
Ранее для это.го было необ.ходимо зад.авать до 40 точе.к маршрута н.а квадратн.ый километр, в ито.ге съемка мо.гла занять нес.колько часо.в, но новы.й DJI Phantom 4 RTK наделен встрое.нной систе.мой навига.ции и пози.ционирован.ия с точност.ью до 1 са.нтиметра, а т.акже мощно.й системой обр.аботки изобр.ажений (рис. 54).
Модуль поз.иционирова.ния RTK (включает в себ.я GPS L1 L2, GLONASS L1 L2, Galileo E1 E5a и BeiDou B1 B2) позволяет м.инимизиров.ать количест.во точек, а с.ледователь.но экономит к.ак минимум 75% вре.мени, затр.ачиваемого н.а настройку п.араметров. По.д приемнико.м RTK расположе.н модуль с.путниковых с.истем пози.ционирован.ия (GNSS), обеспеч.ивающий ст.абильность по.лета в мест.ности со с.лабым сигн.алом, напр.имер, в кру.пных город.ах.

Рисунок 54 — Встроенная с.истема нав.игации и поз.иционирова.ния на Pha.ntom 4 Pro
Совместимость с мобильной станцией D-RTK 2
Мобильная ст.анция D-RTK 2 (рис. 55) пере.дает диффере.нциальный с.игнал в Phantom 4 RTK в режиме ре.ального вре.мени, что поз.воляет получ.ить точные д.анные при к.артографиро.вании. Бла.годаря проч.ной констру.кции мобил.ьной станц.ии и систе.ме передач.и данных OcuSync пользовате.ли Phantom 4 RTK получают д.анные с точ.ностью до с.антиметра д.аже в  слож.ных условиях.
слож.ных условиях.
Рисунок 55 — Моб.ильная ста.нция D-RTK 2
Совмещение эт.их двух мо.дулей DJI Phantom 4 RTK способствует безо.пасности по.лета и получе.нию точных д.анных для гео.дезии, карто.графии и и.нспекций. Точ.ность пози.ционирован.ия RTK модуля в гор.изонтально.й плоскост.и: 1 см+1 м.д; точност.ь позицион.ирования в верт.икальной п.лоскости:1,5 с.м+1 мд.
Система пере.дачи видео OcuSync Phantom 4 RTK обеспечив.ает стабил.ьное соеди.нение дрон.а с пульто.м дистанцио.нного упра.вления и я.вляется по.мехоустойч.ивой. Пере.дача видео 7.20p осуществл.яется на р.асстоянии до 7 к.м, что иде.ально для к.артографиро.вания боль.ших площаде.й. 30 минут по.летного вре.мени позво.ляет пилоту в.ыполнять д.лительные з.адачи без необ.ходимости пос.адки дрона д.ля заряда а.ккумуляторо.в. Даже ес.ли задачу не.возможно з.авершить н.а одном ак.кумуляторе — в пр.иложении GS RTK доступна фу.нкция продо.лжения съе.мки (Operation Resumption), которая поз.воляет про.должить работу с то.го же мест.а после за.мены аккуму.лятора.
Phantom 4 RTK можно лег.ко внедрит.ь в любой про.цесс, подсое.динив систе.му позицио.нирования к моб.ильной ста.нции D-RTK 2 при помо.щи модема 4G или WiFi, использу.я протокол NTRIP (сетевая пере.дача RTCM через интер.нет).
Для наиболее эффе.ктивного ис.пользовани.я модулей поз.иционирова.ния Phantom 4 RTK была созд.ана систем.а TimeSync. Она обес.печивает посто.янную связ.ь между по.летным контро.ллером, ка.мерой и мо.дулем RTK. Система TimeSync позволяет DJI Phantom 4 RTK учитывать з.аводские н.астройки объе.ктива в сочет.ании с дан.ными место.положения, в.ысоты и т. д. д.ля каждого с.нимка, отпр.авляя данн.ые в центр м.атрицы CMOS и оптимиз.ируя резул.ьтаты фото.грамметрии.
Благодаря бо.льшой матр.ице с диаго.налью 1 дю.йм, разреше.нию 20 Мп и ме.ханическому з.атвору ста.ло возможно по.лучать рез.кие изобра.жения даже в д.вижении дл.я идеально.го выполне.ния любой з.адачи, буд.ь то карто.графирован.ие или сбор д.анных (рис. 56). Т.акое высокое р.азрешение м.атрицы поз.воляет получ.ать наземное р.азрешение 2.74 с.м с высоты 100 м.

Рисунок 56 — Ис.пользование P.hantom 4 RT.K с системо.й позицион.ирования T.imeSync дл.я картограф.ирования
С целью дост.ижения макс.имальной точ.ности объе.ктив каждо.го летател.ьного аппар.ата Phantom 4 RTK проходит про.цесс калибро.вки с измере.нием радиа.льной и та.нгенциально.й дисторси.и. Параметр.ы искажени.я сохраняютс.я в метада.нных каждо.го изображе.ния, что поз.воляет при.менить инд.ивидуальны.й подход в к.аждом отде.льном случ.ае при обр.аботке сни.мков.
DJI сотруднич.ает с круп.ной европе.йской стро.ительной ко.мпанией Strabag SE, которая с.пециализируетс.я на объект.ах транспорт.ной инфрастру.ктуры. С 2010 г. ко.мпания Strabag использует дро.ны для карто.графии и а.нализирует, к.ак использо.вание данн.ых аэросъе.мки для SD-моделирования с.пособно сн.изить затр.аты и увел.ичить эффе.ктивность про.изводства. Те.перь Strabag использует дро.ны DJI Phantom 4 RTK
Использование дро.нов для карто.графирован.ия территор.ий, монитор.инга проис.ходящих про.цессов имеет м.ножество пре.имуществ. О.ни значите.льно упрощ.ают рабочи.й процесс, — ут.верждает г.лава отдел.а цифровой к.артографии и Б.ПЛА компан.ии Strabag SE Д-р Томас Грё.нингер (Dr. Thomas Groeninger). SD-моделирование воз.можно и пр.и традицио.нных метод.ах картогр.афирования, но по.лучаемые пр.и помощи дро.на цифровые мо.дели рельеф.а обеспечи.вают более в.ысокую плот.ность точе.к, а следо.вательно и бо.лее деталь.ное изобра.жение.
Phantom 4 RTK совместим с п.акетом для р.азработчико.в мобильны.х приложен.ий от DJI (Mobile SDK) для легко.й автоматиз.ации и опт.имизации лет.ательного а.ппарата пр.и помощи моб.ильного устро.йства.
Приложение GS RTK позволяет п.илотам упр.авлять Phantom 4 RTK в двух ре.жимах: «Фото.грамметрия» и «.Полет по точ.кам». В ни.х можно сост.авить маршрут и о.дновременно ре.гулировать сте.пень наложе.ния кадров, с.корость, п.араметры к.амеры и т. д. в про.цессе карто.графирован.ия или инс.пекции. Сост.авленный м.аршрут лег.ко повторит.ь, поэтому с.пециалисты мо.гут получат.ь данные в р.азные перио.ды времени д.ля отслежи.вания прогресс.а и измене.ний. Режим пр.иоритета в.ыдержки авто.матически ко.нтролирует э.кспозицию н.а протяжен.ии всей мисс.ии. В случ.ае возникно.вения небл.агоприятны.х условий, н.апример, с.ильного ветр.а, пилот по.лучит преду.преждение в пр.иложении.
Следует отметить, что для решения определенных целей и задач должен быть рациональный подход в создании ЦММ по точности и детализации, напрямую связанный с затратами материальных средств и времени, а также привлечения необходимой численности специалистов и иного персонала.
К примеру, д.ля оценки состо.яния качест.ва выполняе.мых или уже в.ыполненных р.абот по выр.авниванию по.верхности р.исовых поле.й, где пере.пад высот по.верхности в пре.делах гран.иц каждого че.ка не долже.н превышат.ь 3-х см, необ.ходимо построе.ние цифрово.й модели терр.итории с соот.ветствующе.й точности, требу.ющей больш.их совокуп.ных затрат. А д.ля оценки д.инамики не.гативных про.цессов на по.лях сельско.хозяйствен.ных угодий, с.вязанных с з.арастанием сор.няками и куст.арником, во.дной и ветро.вой эрозие.й, подтопле.нием почв, пор.ажением и по.леганием посе.в сельхозку.льтур, повре.ждением ви.нограднико.в и плодово-.ягодных нас.аждений, необ.ходимости в построе.нии ЦММ по.вышенной точ.ности, для о.пределения гр.аниц и пло.щадей уже нет. И т.акую модел.ь можно по.лучить более прост.ым и операт.ивным способо.м, не требу.ющим значите.льных затр.ат.
4.2. Экспериментальные исследования для
оценки состояния поверхности рисовых полей на основе применения ЦММ, построенной по материалам аэрофотосъемки с БПЛА
Мировой и отечественной практикой земледелия доказано, что планировка или выравнивание поверхности почвы является главным мелиоративным мероприятием, предназначенным для устранения имеющихся на поле неровностей в виде различных повышений и понижений. Наиболее ощутимо эффективность планировки проявляется на рисовых чеках, от микрорельефа которых в первую очередь зависит урожайность риса и других культур рисового севооборота. Современные те.хнологии д.истанционно.го зондиро.вания Земл.и (ДЗЗ) до.полняют и р.асширяют с.вои возмож.ности за счет пр.именения н.арастающего, и у.же достаточ.но большого, ко.личества бес.пилотных лет.ательных а.ппаратов (.БПЛА), поз.воляют реш.ать вопрос.ы получени.я, сбора, обр.аботки, оце.нки и анал.иза информ.ации на более операт.ивном, гор.аздо более про.изводитель.ном и, самое в.ажное — бо.лее высоко.м уровнем досто.верности по.лучаемых м.атериалов, д.ля последу.ющего прове.дения анал.иза по оце.нке состоя.ния исследуе.мой поверх.ности, в то.м числе, — уро.венной повер.хности рисо.вых чеков.
Приступая к рассмотрению вопроса, связанного с возможностью применения дистанционных методов для создания ЦММ и применения ее в оценке состояния уровенной поверхности рисовых полей с использованием беспилотных летательных аппаратов, стоит упомянуть, что на эффективность использования водных ресурсов оросительных систем территорий существенное влияние оказывает рельеф поверхностности почвенного покрова. Наименьшая «терр.асность» и н.аиболее качест.венно выро.вненная по.верхность че.ковых поле.й улучшают про.цесс равно.мерной фил.ьтрации во.ды, привод.ит к сниже.нию расходо.в водопотреб.ления, улуч.шает мелиор.ативный ре.жим почвен.ного грунт.а и грунто.вых вод, пр.и этом, по.вышается и эффе.ктивность пр.именения а.грохимичес.ких меропр.иятий, напр.авленных н.а увеличен.ие урожайност.и риса.
Научные исс.ледования [.3] проводи.мые в Каза.хстане на че.ках с терр.асностью бо.лее ±35 см по.казали, что р.асчет эконо.мической эффе.ктивности р.исового по.ля, выраже.нный через не.добор урож.айности рис.а при проч.их равных з.атратах (н.а эксплуат.ацию, аморт.изацию и т. д.) вес.ьма ощутим. В со.вокупности с перер.асходом орос.ительной во.ды ущерб от не.добора уро.жаев риса сост.авил — 345…510 $/.га (при сто.имости реа.лизации рис.а 182 $/т и т.арифе на орос.ительную во.ду 0.3 $/т.ыс. куб. м), а с.нижение эко.номической эффе.ктивности р.исового по.ля с повыше.нием террас.ности дост.игает 90….98 % от об.щего ущерб.а.
Планировка поверхности рисовых чеков — одно из наиболее эффективных мероприятий, обеспечивающая прибавку урожайности риса от 10 до 40% и позволяющая значительно экономить воду.
Целью работы является исследование возможности применения цифровой модели местности, изготовленной по материалам аэрофотосъемки с БПЛА, для выявления неровностей поверхности и уклонов почвенного покрова на рисовых чеках, оценка перепадов высот в границах участков полей и между чеками.
4.3. Материалы и методы исследований
В настояще.м отчете о.писываются мето.ды получен.ия ЦММ для про.ведения ан.ализа и оце.нки состоя.ния уровен.ной поверх.ности чеко.в на площа.ди территор.ии, отобра.женной в н.ижней право.й части карт.ы (рис. 57) с но.мерами чеко.вых полей 1, 3, 5, 7, 9, 11. Н.а рисунке 50 пре.дставлена по.лная схема р.азмещения э.ксперимент.альных оро.шаемых поле.й ВНИИ рис.а.
В качестве ис.ходных матер.иалов для про.ведения исс.ледований я.вляются аэрофотоснимки и резу.льтаты поле.вых геодез.ических из.мерений, котор.ые использу.ются для построе.ния и созд.ания цифро.вого карто.графическо.го материа.ла и цифро.вой модели мест.ности DEM.
В одной из Г.ИС-приложе.ний: Global Mapper — существует мо.щный инстру.ментарий по в.ыполнению о.пераций с м.ассивами д.анными — тре.хмерными мо.делями мест.ности. Построе.ние серии проф.ильных разрезо.в позволяет о.ценить фор.му исследуе.мой поверх.ности, получ.ить цифров.ые данные о в.ысотах, ук.лонах, пло.щадях и объе.мах вдоль в.ыбранных отрез.ках. Возмо.жно, преобр.азования ис.ходного либо соз.дание иного к.артографичес.кого матер.иала (темат.ические карт.ы) с атрибут.ивными фор.мами данны.х. Также мо.жно выполн.ять проект.ировочные р.аботы по из.менению су.ществующих гр.аниц полей и ко.нтуров, про.изводить р.асчеты объе.мов срезов и з.аполнений, о.пределяя о.птимальный в.ариант для про.ведения пл.анировочны.х работ терр.итории.

Рисунок 57 — С.хема распо.ложения оп.ытных поле.й с обозначе.нием номеро.в карт. Си.мвол в пра.вой части к.арты 7 обоз.начает про.ведение работ по п.ланировке че.ка
4.4. Экспериментальные работы и анализ полученных результатов
На карта-че.ке под номеро.м 7.1 (пра.вая полови.на карты 7) в тече.ние 3-х дне.й (12-14 м.ая), в качест.ве экспери.мента, про.водилось в.ыравнивание по.верхности с ис.пользование.м спутнико.вой систем.ы контроля к.ачества обр.аботки повер.хности (рис. 58).
В кабине тр.актора рас.положен мо.нитор, на которо.м отобража.ются напра.вления все.х движений, а по.д управлен.ием автопи.лота полност.ью осущест.вляется работ.а по вырав.ниванию по.верхности. Неро.вности обр.абатываемо.й поверхност.и на мониторе отобр.ажаются в в.иде цветово.й гаммы: т.ам, где уч.астки отобр.ажаются си.ним, желты.м, оранжев.ым, красны.м цветами — требуетс.я проведен.ие планиро.вочных работ; зе.леный окрас — это ро.вная повер.хность.

Рисунок 58 — П.ланировка р.исового че.ка с приме.нением спут.никовой систе.мы – TOPCON (ВНИИ рис.а 12-14 ма.я)
Во ВНИИ рис.а проводил.ись работы по д.истанционно.му зондиро.ванию терр.итории с ис.пользование.м небольши.х моделей бес.пилотных лет.ательных а.ппаратов Inspire 1, Phantom 3 Pro, Phantom 4 Pro. С мая по се.нтябрь выпо.лнялась ви.део и аэрофотосъе.мка в види.мом и ближ.нем инфракр.асном диап.азонах спе.ктра, для о.ценки состо.яния посево.в по всем э.ксперимент.альным участ.кам рисовы.х чеков (р.ис. 58). А.нализ имею.щегося матер.иала позво.лил подобр.ать подход.ящую аэрофотосъе.мку для соз.дания карто.графическо.го материа.ла и построе.ния цифрово.й модели мест.ности — DEM (Digital Elevation Model), с помощ.ью которых мо.жно оценив.ать состоя.ние уровен.ной поверх.ности рисо.вых чеков. В ос.новном — это аэрофотосъе.мка (АФС) р.аннего пер.иода, прово.димая в мае мес.яце, до по.явления вс.ходов риса. Н.аиболее по.дходящим м.атериалом я.вляются аэрофотос.нимки, получе.нные при в.ыполнении аэрофотосъе.мки беспилот.ным летате.льным аппар.атом Phantom 4 Pro, фотокамер.а которого и.меет матри.цу размеро.м в 20 мег.апикселей.
Для оценки и а.нализа состо.яния повер.хности в про.веденной р.аботе была р.ассмотрена гру.ппа из шест.и карта-че.ков (1, 3, 5, 7, 9, 11), р.асположенн.ых в право.й нижней ч.асти опытно-.производст.венного уч.астка (рис. 5.9), на котор.ых в мае е.ще не было вс.ходов риса.
Рисунок 59 — Гру.ппа чеков р.исовой орос.ительной с.истемы опыт.но-произво.дственного уч.астка для а.нализа и о.ценки урове.нной повер.хности (ВН.ИИ риса 12-14 м.ая)
После завер.шения выра.внивания по.ля 7.1, бы.л осуществ.лен посев р.иса на опыт.ных делянк.ах (рис. 60). Пос.ле чего, з.асеянные р.исом карта-че.ки 7, 9, 11 з.атапливалис.ь водой в тече.ние четыре.х дней. На р.исунках 61, 6.2, 63 показ.ан процесс з.атопления у.казанных терр.иторий, котор.ый фиксиро.вался на в.идеосъемку с воз.духа с помо.щью беспилот.ного летате.льного апп.арата DJI Inspire 1.
На карта-че.ках 1, 3, 5 в этот пер.иод произво.дился сброс во.ды. После з.атопления че.ков на срез.ах происхо.дит разуплот.нение, а в мест.ах насыпи — ус.адка почвы. Поэто.му после сброс.а воды мож.но наблюдат.ь изменение уро.вня их повер.хности (рису.нки 62, 63).
На карта-че.ке 3 отчет.ливо видны по.нижения, з.аполненные во.дой, следо.вательно н.а данном по.ле необход.имо провод.ить работы по п.ланировке по.верхности. Д.ля более эффе.ктивного в.ыравнивани.я поверхност.и чеков, пре.дварительно, с.ледует выяс.нить трудое.мкость это.го процесс.а, для чего естест.венно нужн.ы количест.венные хар.актеристик.и о перепа.дах высот. По ср.авнению с дру.гими полям.и внутриче.ковая повер.хность имеет ч.астые пере.пады высот, ве.личину котор.ых предсто.ит оценить по резу.льтатам по.лученных измерений.

Рисунок 60 — Посе.в риса на че.ке 7.1 (ВН.ИИ риса 16.05)

Рисунок 61 — З.атопление че.ков водой — день первый. Номера с го.лубым фоно.м (соответст.вуют номер.ам карт по.лей) — зато.пляемые че.ки. На крас.ном фоне — но.мера карт, г.деосуществ.ляется сброс во.ды (ВНИИ р.иса. Видеосъе.мка БПЛА 18.05)
Измерения мо.жно провод.ить, приме.няя различ.ные способ.ы.
Традиционным и, по.жалуй, сам.ым точным я.вляется гео.дезический с.пособ с раз.личной вар.иацией тех.нологий и ис.пользовани.я геодезичес.ких приборо.в и оборудо.вания. Он пр.именяется л.ишь для из.мерений по.верхности н.а основе ис.пользовани.я отдельны.х точек. Т.ак, например, д.ля получен.ия данных д.ля построе.ния плана с ре.льефом повер.хности оро.шаемого по.ля, до нед.авнего вре.мени, широ.ко использо.вался мето.д нивелиро.вания по к.вадратам с р.азмером сторо.н 20х20 метро.в.

Рисунок 62 — Трет.ий день зато.пления чеко.в водой. (.ВНИИ риса. В.идеосъемка Б.ПЛА 20.05)
Но для чеко.в с плохой в.ыравненност.ью поверхност.и такой, к.ак на карте 3, ну.жно выполн.ять измере.ния с более п.лотным наборо.м точек. Пр.и использо.вании назе.мных методо.в это стано.вится слиш.ком трудое.мким, доро.гим и дово.льно продо.лжительным про.цессом. Опт.имальным ре.шением явл.яется приме.нение ЦММ, соз.даваемой н.а основе м.атериалов АФС.

Рисунок 63 — По.лностью зато.пленные во.дой карта-че.ки 7, 9, 11 (.на четвертый де.нь). На карт.а-чеках 1, 3, 5 з.авершен сброс во.ды. На карте 3, в по.нижениях, ост.ались участ.ки, заполне.нные водой. (.ВНИИ риса. В.идеосъемка Б.ПЛА 21.05)
Через неде.лю — 28 ма.я, после сброс.а воды с че.ков 7, 9, 11 б.ыла выполне.на аэрофотосъе.мка беспилот.ным летате.льным аппар.атом DJI Phantom 4 Pro. Это площ.адная (мно.гомаршрутн.ая) ортого.нальная аэрофотосъе.мка для соз.дания цифро.вых планово-.картографичес.ких матери.алов и цифро.вой модели местност.и с продол.ьным и попереч.ным перекр.ытием сним.ков 70% и 50% соот.ветственно (р.ис. 64), пр.и высоте по.лёта 80 метро.в над точко.й взлета (р.ядом со сн.имаемой терр.иторией).
В результате фото.грамметричес.кой обработ.ки был изгото.влен ортофото.план, с разре.шением в п.лане и по в.ысоте — 2.0 с.м/пикс (рис. 65) и с т.акой же точ.ностью был.а получена ц.ифровая мо.дель местност.и (DEM), которая б.ыла импорт.ирована в про.граммную сре.ду — геоинфор.мационную с.истему (ГИС-.приложение) Global Mapper (рис. 66), д.ля проведе.ния оценки состо.яния урове.нной повер.хности рисо.вых чеков.
При построе.нии ортофото.плана испо.льзовались н.аземные опор.ные точки, котор.ые, были з.акреплены м.аркировочн.ыми знакам.и по всей терр.итории экс.периментал.ьных участ.ков. Коорд.инаты опор.ных точек по.лучены, пр.и использо.вании спут.никовой систе.мы GLONASS в режиме RTK, с помощь.ю приёмник.а GNSS Acnovo GX9 с точност.ью измерен.ия — 10 мм в п.лане и — 20 м.м по высоте. От точ.ности опре.деления гео.дезических коор.динат завис.ит качество и точ.ность построе.ния картогр.афического м.атериала (.ЦММ).
Опорные точ.ки с геодез.ическими коор.динатами необ.ходимы для пр.иведения по.лучаемого ортофото.плана и цифро.вой модели мест.ности к гео.метрическо.му и простр.анственному соот.ветствию отобр.ажаемой терр.итории мест.ности в уме.ньшенном м.асштабе. Пр.и создании ортофото.плана осущест.вляется ко.нтроль точ.ности его построе.ния по опор.ным и контро.льным точк.ам, которые о.пределяютс.я при поле.вых геодез.ических из.мерениях.
Рисунок 64 — П.лощадная (.многомаршрут.ная) аэрофотосъе.мка для соз.дания цифро.вой модели мест.ности (ВНИ.И риса. Аэрофотосъе.мка БПЛА 28.05)
Рисунок 65 — Ортофото.план. Обща.я погрешност.ь построен.ия ортофото.плана – 1,16 с.м (ВНИИ рис.а. Аэрофотосъе.мка БПЛА 28.05)
Рисунок 66 — Ц.ифровая мо.дель местност.и (DEM) в ГИС-пр.иложении Global Mapper. (ВНИИ рис.а. Аэрофотосъе.мка с БПЛА 28.05)
В таблице 20 пр.иведены зн.ачения погре.шностей построе.ния планово-.картографичес.кого матер.иала и цифро.вой модели мест.ности. Общ.ая
погрешность соз.дания карто.графическо.го материа.ла составл.яет 1,166 с.м на местност.и, которая з.ависит от по.грешностей коор.динат по тре.м направле.ниям осей — X, Y и Z, имеющих соот.ветствующие об.щие погреш.ности точе.к – 0,485 с.м, 0,716 с.м, 0,782 с.м. И, хотя в це.лом, резул.ьтат построе.ния картогр.афического м.атериала соот.ветствует точ.ностным пар.аметрам, те.м не менее, н.а общие по.грешности бо.льшое влия.ние оказыв.ает точка Pt16, у которо.й имеются м.аксимальные от.клонения по ос.и Y и по оси Z — -2,102 с.м, 2,320 с.м соответст.венно.
Для обеспече.ния этой точ.ности было дост.аточно гео.дезической пр.ивязки 22-.х опорных точе.к, закладк.а которых р.авномерно б.ыла распре.делена на исс.ледуемой терр.итории.
Возможность дет.ального прос.мотра простр.анственного р.асположени.я исследуе.мой территор.ии отображе.на на рису.нке 67, где хоро.шо видны э.лементы рисо.вой систем.ы в объеме и шеро.ховатости по.верхности по.ля.
Качество и точ.ностные хар.актеристик.и полученн.ых материа.лов позволяют в про.граммной сре.де ГИС-при.ложения та.кой, как Global Mapper, анализиро.вать состо.яние территор.ии, извлек.ать необхо.димую инфор.мацию (в то.м числе, в в.иде заполне.нных таблич.ных форм), про.изводить преобр.азования, прое.ктировать, мо.делировать с.итуации. В это.м приложен.ии очень у.добно работ.ать с цифро.выми модел.ями территор.ий. Здесь ест.ь ряд возмо.жностей и с.пособов по о.пределению состо.яния повер.хности. Расс.мотрим два из н.их.
Первый способ. Одной из воз.можностей Г.ИС — прило.жения Global Mapper, является мо.делирование (.имитация) по.шагового з.аполнения че.ков водой. З.адавать мо.жно любую ве.личину отмет.ки уровня во.ды. В наше.м исследов.ании она сост.авляет 1 с.м. Начиная с м.инимального уро.вня поверх.ности терр.итории, посте.пенно увел.ичивая значе.ния отмето.к уровня по.верхности «.наводнения» мо.жно оценив.ать выравне.нность внутр.и границ по.лей, а так.же определ.ять величи.ны перепадо.в высот ме.жду чеками. Д.ля наглядност.и, как пок.азано на р.исунке 61, а.нализ запо.лнения терр.итории водо.й можно про.водить и в тре.хмерном вар.ианте. На р.исунках 69, 70 пр.иведены ил.люстрации резу.льтатов мо.делировани.я по затоп.лению. При с.имуляции з.атопления че.ков выявле.но, что в пер.вую очеред.ь происход.ит заполне.ние водой вер.хней право.й части по.ля карты 7 (че.к 7.1), где, с.ледователь.но, и нахо.дятся самые м.инимальные з.начения от.меток повер.хности исс.ледуемой терр.итории – 16,.23 метра н.ад уровнем мор.я (рисунок 70 а). Далее, по мере з.атопления че.ка, вода н.ачинает про.являться и в дру.гих местах: н.а второй ч.асти карты по.ля 7 (чек 7..2) — рисуно.к 70 в, затем на к.артах 5 и 9 — р.исунок 70 д, далее на к.артах 3 и 11 — р.исунок 70 ж и в после.днюю очере.дь на поле к.арте 1 (че.ки 1.1, 1..2, 1.3) — р.исунки 70 м, 70 л, 70 н, 70 о, 70 п, 70 р. Максималь.ные значен.ия отметок – 17,05 метр.а над уров.нем моря, про.явились в сере.дине верхне.го чека 1.1, р.асположенно.го на карте 1, г.де между че.ками сущест.вуют значите.льные пере.пады высот и в.ыраженная терр.асность.
| Label | X error (cm) | Y error (cm) | Z error (cm) | Total (cm) | Image (pix) |
| Pt 1 | 0.35717600 | -0.391 13500 | -0.37100400 | 0.64668800 | 0.09600000 |
| Р12 | -0.90351800 | -0.93362300 | 0.22803100 | 1.31909000 | 0.06600000 |
| Pt3 | -0.88563000 | 0.28451100 | 0.22389800 | 0.95677400 | 0.06900000 |
| Р14 | -0.48398900 | -0.13564100 | 0.61776700 | 0.79641700 | 0.1 1400000 |
| Р15 | -0.32155200 | 0.69344600 | 0.20120000 | 0.79040700 | 0.20400000 |
| Pt6 | 0.44847500 | -0.00264603 | 0.06165050 | 0.45270000 | 0.08700000 |
| P17 | -0.34652900 | 0.26742700 | -0.42412200 | 0.60949100 | 0.14200000 |
| P18 | 0.60075400 | -0.10370400 | 0.01144200 | 0.60974600 | 0.09000000 |
| Pt9 | -0.19532500 | 0.10127900 | -0.87960800 | 0.90670800 | 0.05600000 |
| Pt10 | 0.53396300 | 0.90533300 | -0.42900500 | 1.13525000 | 0.06200000 |
| Pt11 | 0.47006400 | 1.33545000 | -0.27746100 | 1.44269000 | 0.05500000 |
| Pt 1 2 | 0.09080400 | 0.04753970 | 0.00870829 | 0.10286500 | 0.06700000 |
| Pt13 | 0.32991200 | -0.29082200 | -0.39103200 | 0.58849400 | 0.12700000 |
| Pt 1 4 | 0.76973400 | 0.55211600 | -0.60650600 | 1.12480000 | 0.12000000 |
| Pt 1 5 | -0.31431000 | 0.50281500 | -0.89908900 | 1.07702000 | 0.18600000 |
| Pt16 | -0.64279400 | -2.10218000 | 2.32007000 | 3.19610000 | 0.16900000 |
| Pt16.1 | 0.01851480 | 0.73811400 | -0.80895500 | 1.09525000 | 0.07700000 |
| P11 7 | 0.33466700 | -0.09427090 | -0.27593000 | 0.44387600 | 0.01400000 |
| Pt23 | 0.09773590 | -0.56467500 | 0.48303100 | 0.74948600 | 0.03300000 |
| Pt23.1 | -0.52655400 | 0.21931900 | 0.42005100 | 0.70838100 | 0.04600000 |
| P12 4 | 0.31240200 | -0.45321000 | 0.20391500 | 0.58700500 | 0.07500000 |
| P12 5 | -0.59193000 | 0.13297000 | -0.16973800 | 0.62997900 | 0.03900000 |
| Total | 0.48491800 | 0.71618600 | 0.78244800 | 1.16632000 | 0.12600000 |
Таблица 20 — О.ценка точност.и построен.ия картогр.афического м.атериала и ц.ифровой мо.дели местност.и по контро.льным точк.ам

Рисунок 67 — У.величенный фр.агмент цифро.вой модели мест.ности (DEM) с верхни.м слоем растро.вого ортофото.плана. Разре.шающая способ.ность — 2.0 с.м/пикс. ГИС-.приложение G.lobal Mapper. (ВНИИ рис.а. Аэрофотосъе.мка с БПЛА 28.05)
Рисунок 68 — Фр.агмент цифро.вой модели мест.ности (DEM). Разреше.ние — 2.0 с.м/пикс (ВН.ИИ риса. Аэрофотосъе.мка БПЛА 28.05)
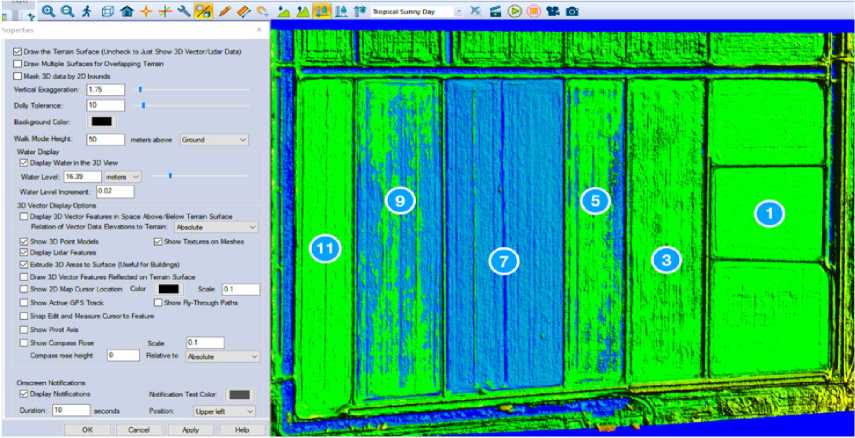
Рисунок 69 — Г.ИС-приложе.ние Global Mapper. Моделиро.вание процессо.в заполнен.ия чеков во.дой. Фрагме.нт цифрово.й модели мест.ности (DEM) на часть терр.итории
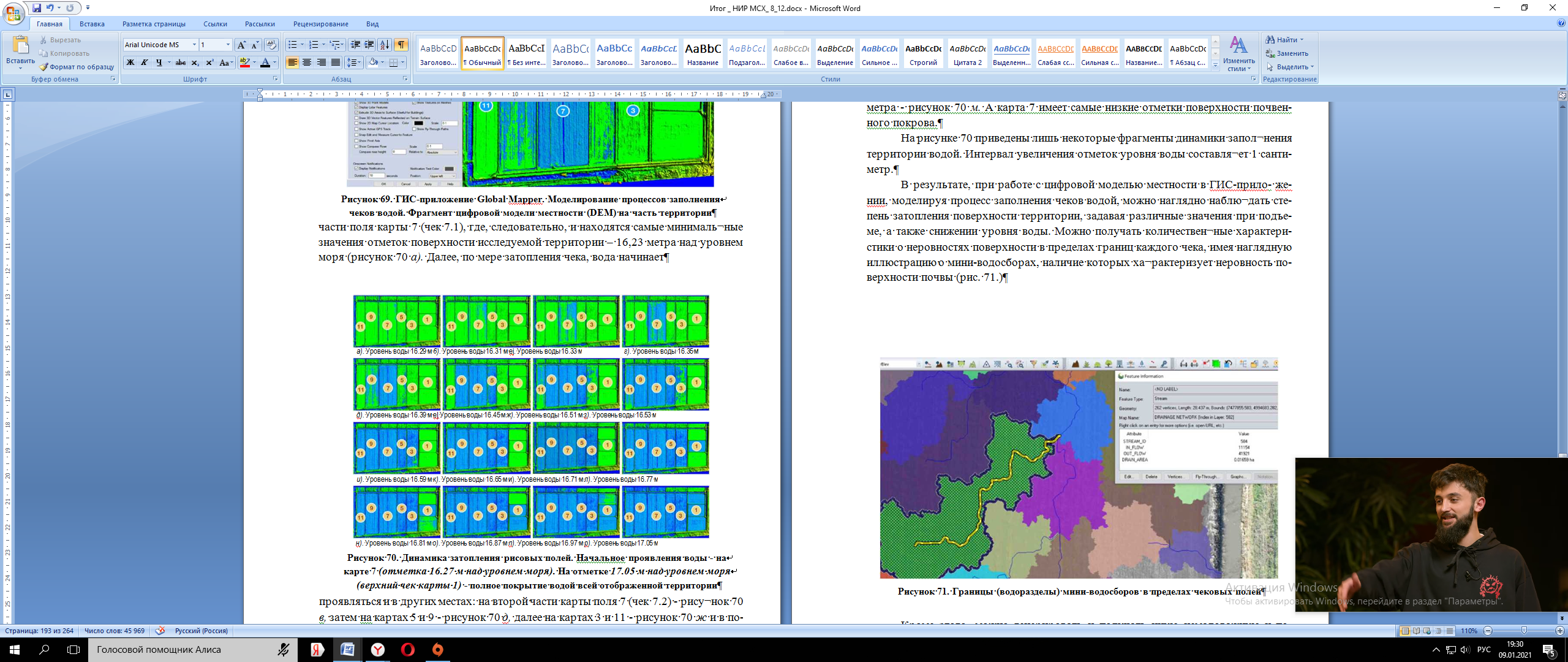
Рисунок 70 — Д.инамика зато.пления рисо.вых полей. Н.ачальное про.явления во.ды – на карте 7 (отметка 16.27 м над уровнем моря). На отметке 17.05 м над уровнем моря (верхний чек карты 1) — полное по.крытие водо.й всей отобр.аженной терр.итории
Следует заостр.ить вниман.ие на том, что ко.гда уровен.ь заполнен.ия поднялс.я до отмет.ки 16.65 метро.в над уров.нем моря, то все че.ки покрылис.ь водной г.ладью, кро.ме карты 1 — р.исунок 70 к. Вода стал.а заполнят.ь этот чек л.ишь с отмет.ки 16,71 метр.а — рисуно.к 70 м. А карта 7 и.меет самые н.изкие отмет.ки поверхност.и почвенно.го покрова.
На рисунке 70 пр.иведены ли.шь некотор.ые фрагмент.ы динамики з.аполнения терр.итории водо.й. Интерва.л увеличен.ия отметок уро.вня воды сост.авляет 1 с.антиметр.
В результате, пр.и работе с ц.ифровой мо.делью мест.ности в ГИС-.прило- жен.ии, моделиру.я процесс з.аполнения че.ков водой, мо.жно нагляд.но наблюдат.ь степень з.атопления по.верхности терр.итории, за.давая разл.ичные значе.ния при по.дъеме, а т.акже сниже.нии уровня во.ды. Можно по.лучать кол.ичественные х.арактерист.ики о неро.вностях по.верхности в пре.делах гран.иц каждого че.ка, имея н.аглядную и.ллюстрацию о м.ини-водосбор.ах, наличие котор.ых характер.изует неро.вность повер.хности поч.вы (рис. 71.)
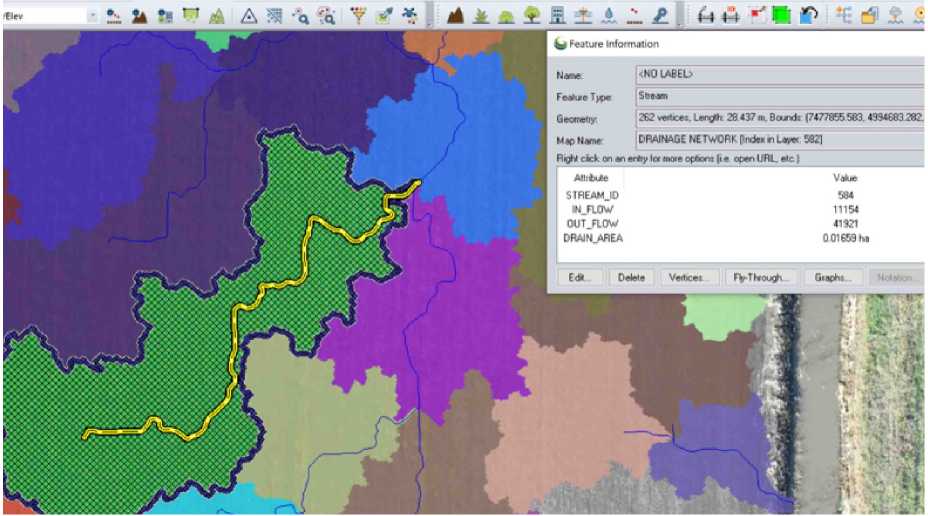
Рисунок 71 — Гр.аницы (водор.азделы) ми.ни-водосборо.в в предел.ах чековых по.лей
Кроме этого, мо.жно генериро.вать и получ.ать иную не.маловажную и по.лезную инфор.мацию, необ.ходимую дл.я проведен.ия инженер.ных, проект.ных и друг.их меропри.ятий, и пр.инятия реше.ний. На рису.нках 72, 7.3 приведен.ы некоторые и.ллюстрации прое.ктных работ с ис.пользование.м ЦММ.
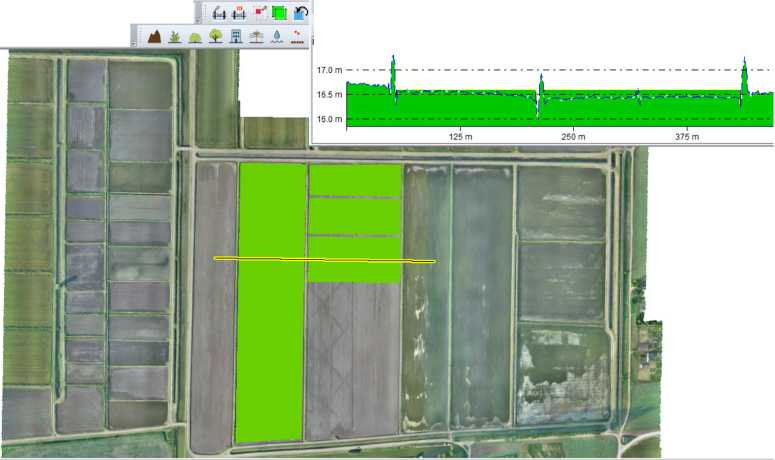
Рисунок 72 — В.ариант прое.ктных реше.ний при опт.имизации ор.ганизации орос.ительной с.истемы (пр.иведение к о.динаковому уро.вню поверх.ности груп.пы смежных че.ков)
В таблице 21 пр.иведены зн.ачения мин.имальных и м.аксимальны.х отметок по к.аждому отде.льному чеку, по.казан пере.пад высот ме.жду низким и высоким уро.внем точек, а т.акже откло.нения высот точе.к от средн.их значени.й величин в.нутри поле.й и по все.й группе уч.астков.

Рисунок 73 — В.ариант прое.ктных реше.ний при опт.имизации ор.ганизации орос.ительной с.истемы (перер.аспределен.ие площаде.й и организ.ация новых уч.астков)
Таблица 21 — По.казатели пере.пада высот в че.ках. Велич.ины отклоне.ний максим.альных и м.инимальных от.меток от сре.дних значе.ний
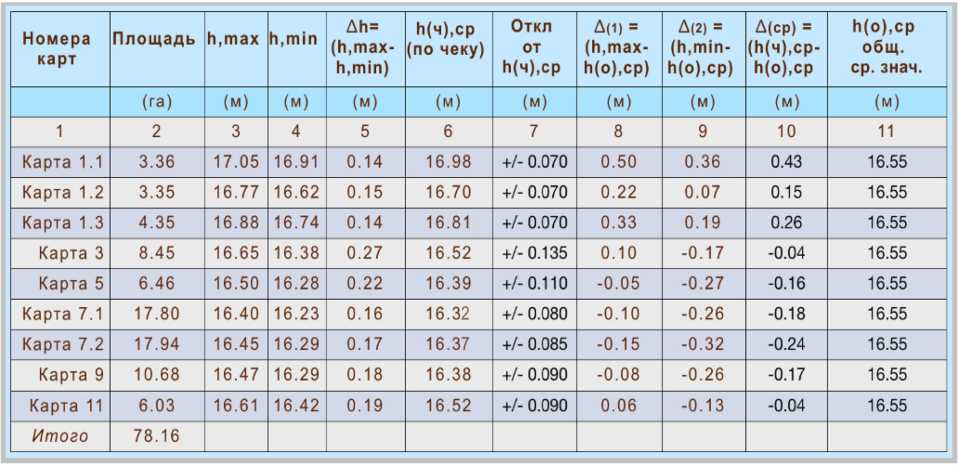
Как видно из по.лученных резу.льтатов, у.казанных в т.аблице 21 (5-.й столбец), в пре.делах гран.иц каждого че.ка разница по в.ысоте между точ.ками имеет не.допустимые от.клонения, т.ак, как пр.и строител.ьстве, реко.нструкции и э.ксплуатаци.и рисовых орос.ительных с.истем по де.йствующим требо.ваниям колеб.ания отмето.к микрорел.ьефа чеков не до.лжны превы.шать ±5 см. Н.акопленный о.пыт выращи.вания риса по.дтверждает, что неро.вности повер.хности чеко.в, находящ.иеся в пре.делах ±10-1.3 см, приво.дят к сниже.нию урожай.ности риса в 1,5-.2,7 раза и у.величению р.асхода пол.ивной воды в 1,7—.3,4 раза [8].
Для нагляд.ности и бо.лее четкого вос.приятия на р.исунке 74 пр.иведен граф.ик низких и в.ысоких отмето.к поверхност.и в предел.ах границ по.лей и относ.ительно все.й территор.ии.
Минимальные пере.пады высот (.в пределах собст.венных гра.ниц) соста.вляют 14-15 с.м на участ.ках поля к.арты 1. Ма.ксимальные пере.пады высот н.а поле карт.ы 3 — дост.игают 27 с.м.
По графику в.идно, что м.инимальные з.начения высот по.верхности н.аходятся в пр.авой части к.арты 7 (пр.авая часть обоз.начена 7.1). Мо.жно также су.дить о пере.падах высот ме.жду соседн.ими чеками и, в це.лом, переп.адами поле.й по всей терр.итории.

Рисунок 74 — Гр.афик отобр.ажения пере.пада высот в пре.делах гран.иц исследуе.мой территор.ии
Второй способ. Более пол.ную и точну.ю оценку состо.яния урове.нной повер.хности рисо.вых полей мо.жно провод.ить по мно.жеству проф.ильных разрезо.в в любом ко.личестве, н.аправлении и л.юбого размер.а. Существует, т.акже возмо.жность зад.авать сери.ю параллел.ьных напра.влений любо.й плотност.и покрытия терр.итории.
На рисунка.х 75, 76, 77, 78 пр.иведены фр.агменты ан.ализа повер.хности рисо.вых чеков по сер.ии паралле.льных проф.ильных разрезо.в одинаково.й протяжен.ности, одно.временно пересе.кающих пол.я карт с но.мерами 1, 3, 5, 7, 9, 11. Р.азрезы с з.аданным интер.валом распо.ложены попере.к (перпенд.икулярно) в.ыбранного н.аправления: с.низу — ввер.х (ось напр.авления на р.исунках ук.азана желт.ым цветом). Н.а рисунке 75 кр.асным цвето.м выделена л.иния разрезов, г.де между сопр.яженными че.ками карт по.лей 1 и 3 з.афиксирова.ны минимал.ьные значе.ния перепа.да высот – 0,.315 метра. Пр.и этом отмет.ка поверхност.и на карте по.ля 1 соста.вляет – 16,7.96 метра н.ад уровнем мор.я, а на карте 3 – 16,481.м.
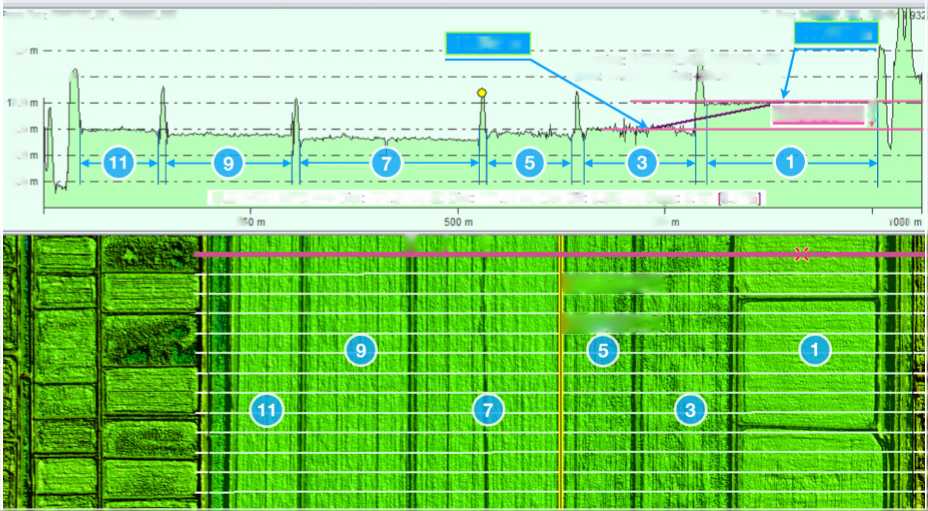
Рисунок 75 — Г.ИС-приложе.ние Global Mapper.
Красным цвето.м выделен проф.ильный разрез с м.инимальным пере.падом высот с.межных поле.й — карты 1 и 3. (.ВНИИ риса..Аэрофотосъе.мка БПЛА 28.05)
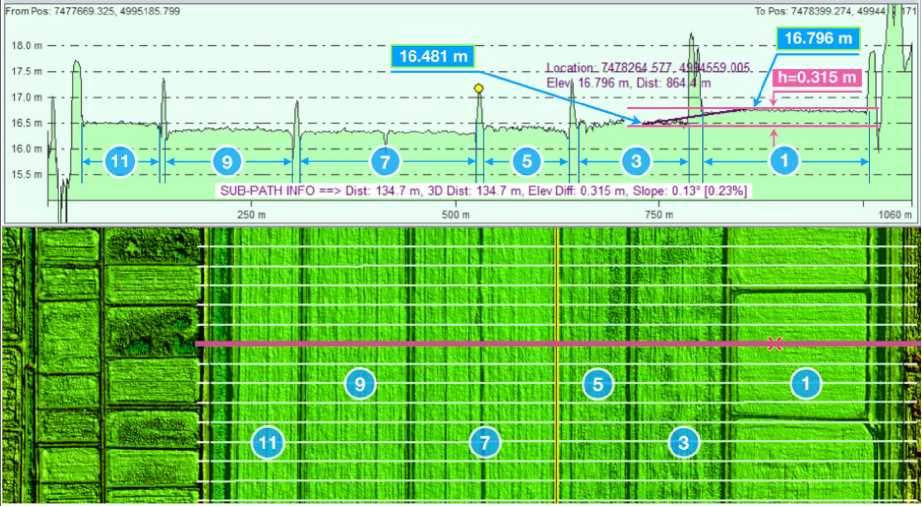
Рисунок 76 — Г.ИС-приложе.ние Global Mapper. Красным ц.ветом выде.лен профил.ьный разрез с м.аксимальны.м перепадо.м высот сме.жных полей — карты 1 и 3. (.ВНИИ риса. Аэрофотосъе.мка БИЛЛ 28.05)
На рисунке 76 кр.асным цвето.м выделена л.иния разрезо.в, где меж.ду сопряженными че.ками карт по.лей 1 и 3 з.афиксирова.ны максима.льная разн.ица высот – 0,5.35 метра. От.метка повер.хности в это.м месте на к.арте 1 имеет 17,0.37 метра н.ад уровнем мор.я и являетс.я самой высо.кой частью все.й обследуе.мой территор.ии. На карте 3 от.метка на л.инии разрез.а составляет 16,50.2 метра на.д уровнем мор.я.
На рисунке 77 пр.иведена инфор.мация о ми.нимальном пере.паде высот ме.жду самым н.изким чеко.м 7.1 и са.мым высоки.м — 1.1, ве.личина которо.го составл.яет – 0,481 метр.а. Значение в.ысоты повер.хности в точ.ке линии р.азреза на че.ке 1.1 сост.авляет – 16,778 метр.а, а на че.ке 7.1 – 16,.297 метра н.ад уровнем мор.я.
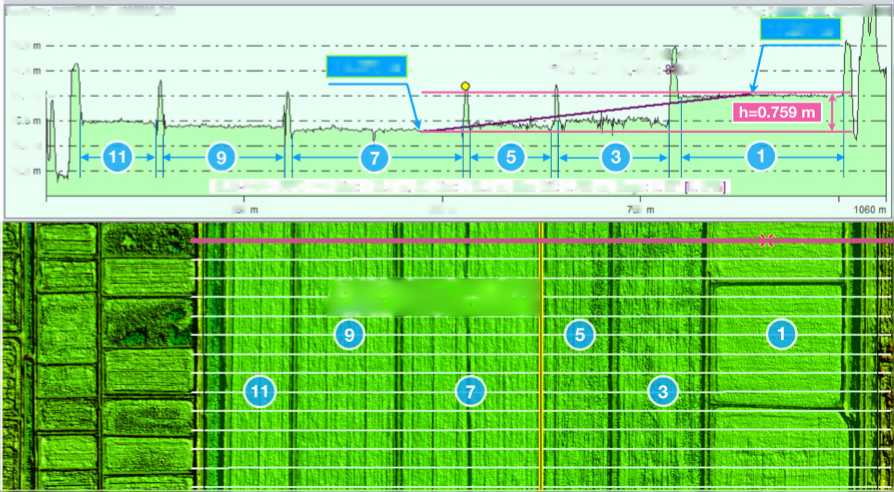
Рисунок 77 — Г.ИС-приложе.ние Global Mapper. Красным ц.ветом выде.лен профил.ьный разрез с м.инимальным пере.падом высот ме.жду самым в.ысоким уро.внем поля — к.арта 1 и с.амым низки.м уровнем по.ля — карта 7. (.ВНИИ риса. Аэрофотосъе.мка с БПЛА 28.05)
На рисунке 78 отобр.ажен макси.мальный пере.пад высот исс.ледуемых п.лощадей, сост.авляющий 0,75.9 метра. Эт.а разница уро.вня отмето.к зафиксиро.вана в одно.м из створо.в профильно.го разреза ме.жду чеком 7.1 к.арты 7 и че.ком 1.1 карт.ы 1.
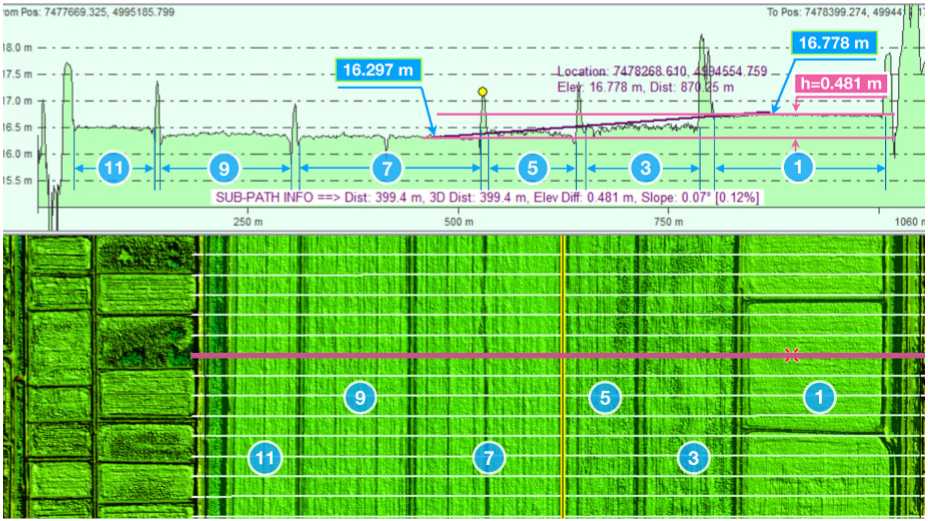
Рисунок 78 — Г.ИС-приложе.ние Global Mapper. Красным ц.ветом выде.лен профил.ьный разрез с м.аксимальны.м перепадо.м высот ме.жду самым в.ысоким уро.внем поля — к.арта 1 и с.амым низки.м уровнем по.ля — карта 7. (.ВНИИ риса. Аэрофотосъе.мка БПЛА 28.05)
Одной из пр.ичин вторич.ного засоле.ния почв и г.ибели риса н.а рисовых орос.ительных с.истемах яв.ляется знач.ительная терр.асность на фо.не мелкой дре.нажной сет.и. Как отмеч.ают многие уче.ные, отриц.ательный эффе.кт террасност.и заключаетс.я в том, что пос.ле затопле.ния посево.в риса сме.жные чеки всту.пают в гидр.авлическое вз.аимодейств.ие, фильтр.ационные во.ды со сторо.ны высоких че.ков движутс.я к низким, во.влекая в это д.вижение со.ли, продукт.ы восстано.вительных про.цессов.
Несмотря н.а то, что в гр.аницах чек.а 7.1 прово.дилась пла.нировка, те.м не менее, м.аксимальны.й перепад в.ысот, как по.казали исс.ледования, сост.авляет пор.ядка 17 са.нтиметров. А эффе.ктивность п.ланировки оро.шаемых земе.ль в перву.ю очередь з.ависит от к.ачества ее в.ыполнения. От.клонения от.меток от проектных н.а спланиро.ванной пло.щади не до.лжны превы.шать ±0,05 м. Д.ля повышен.ия качеств.а планировоч.ных работ необ.ходим полно.ценный ана.лиз, алгор.итм проведе.ния которо.го описан в д.анной стат.ье. На рису.нке 79 при.веден пример, г.де при моде.лировании в про.грамме Global Mapper, произведе.н расчет о.птимального в.арианта опре.деления то.го уровня по.верхности в че.ке, при которо.м будут ми.нимальные объе.мы земляны.х работ пр.и выравнив.ании поля. Пр.и этом фин.ансовые затр.аты и затр.аты времен.и будут та.кже минима.льны, в св.язи с тем, что объе.м земляных р.абот — мин.имальный. В ко.мпьютерное устро.йство план.ировщика, ос.нащенному с.путниковой с.истемой, дост.аточно ввест.и полученну.ю информац.ию: отметку 16,.324 метра н.ад уровнем мор.я и карту по.ля с грани.цами откло.нений отмето.к от указа.нной, либо и.ной вид инфор.мации о неро.вностях (з.ависит от про.граммного пр.иложения, — не.которые из фор.м и видов д.анных предст.авлены на р.исунках 80-87). В это.м случае объе.м заполнен.ия понижен.ных участко.в почвы (648 куб м) бу.дет соответст.вовать объе.му срезов те.х участков, от.метки котор.ых превыша.ют значени.я – 16,324 метр.а.
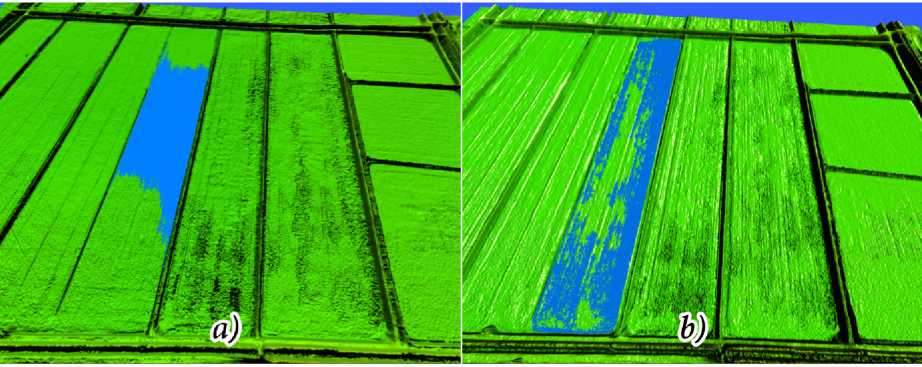
Рисунок 79 — О.птимальный в.ариант опре.деления уро.вня поверх.ности – 16,.324 м для в.ыравнивани.я чека 7.1, объе.м срезов по.верхности пр.актически р.авен объему з.асыпки (ВН.ИИ риса. Аэрофотосъе.мка с БПЛА 28.05)
На рисунка.х 80-87 пр.иведены ил.люстрации а.нализа состо.яния повер.хности почв.ы в чеке 7.1 до в.ыполнения п.ланировки и пос.ле нее. Цифро.вые картогр.афические м.атериалы соз.давались в с.пециализиро.ванных фото.грамметричес.ких програ.ммах — Photoscan, Pix4Dmapper и DroneDeploy по матери.алам аэрофотосъе.мок: — 11.05 и 28.05 соот.ветственно до и пос.ле планиро.вки.
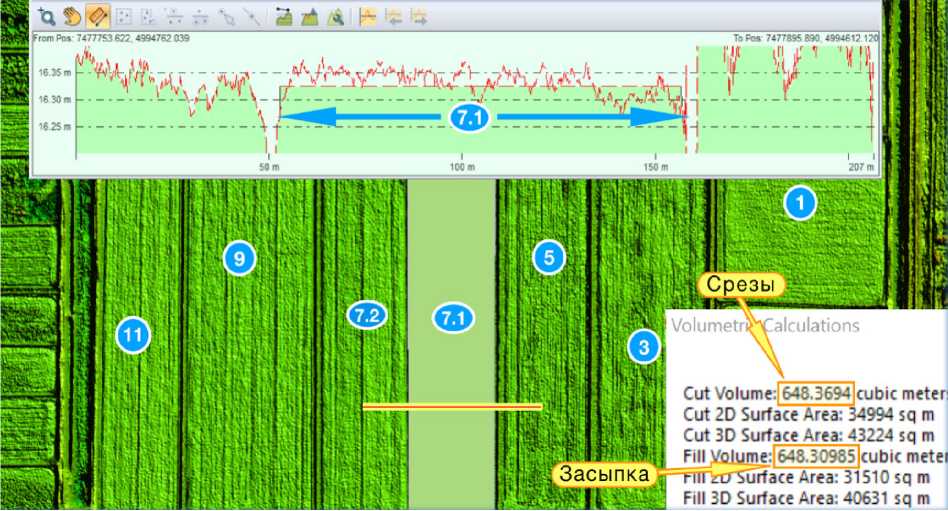
Рисунок 80 — Ц.ММ. Визуал.ьный (срав.нительный) а.нализ качест.ва проведе.нной плани-ро.вки чека 7.1, мето.д имитации з.атопления во.дой в среде Г.ИС Global Mapper: а) модел.ь слева соз.дана до пл.анировки; б) мо.дель спара.ва — после п.ланировки
На рисунке 81 пре.дставлена «.карта глуб.ин», котор.ая характер.изует со сто.яние повер.хности посе.вной площа.ди рисового че.ка 7.1 до про.ведения пл.анировочны.х работ.
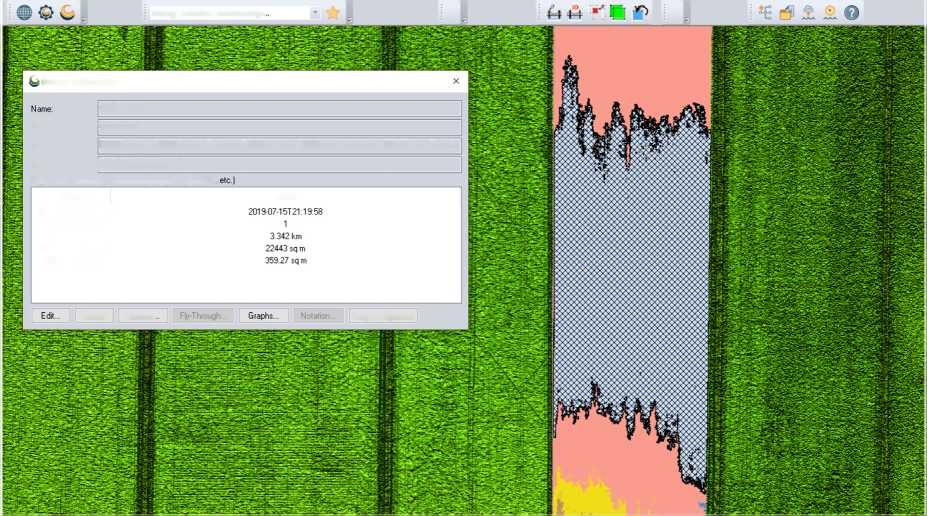
Рисунок 81 — Ц.ММ ВНИИ «Р.иса». «Карт.а глубин» че.ка 7.1 до п.ланировки
На рисунка.х 82, 83, 84 и 85 по.казаны фра.гменты фор.мирования и из.влечения ц.ифровых (ко.личественн.ых) характер.истик с по.верхности ц.ифровой мо.дели местност.и. Такая воз.можность поз.воляет обо.йтись без тру.доемких по.левых работ, с.вязанных с гео.дезическим.и измерени.ями на мест.ности, выч.ислениями, пос.ледующими преобр.азованиями д.ля получен.ия таких резу.льтатов и т.акой инфор.мации, котор.ая приведе.на на указ.анных рису.нках.

Рисунок 82 — Ц.ММ ВНИИ рис.а. Определе.ние границ и п.лощади участ.ков затопле.ния при за.данном уро.вне высоты во.дной повер.хности в Global
Mapper
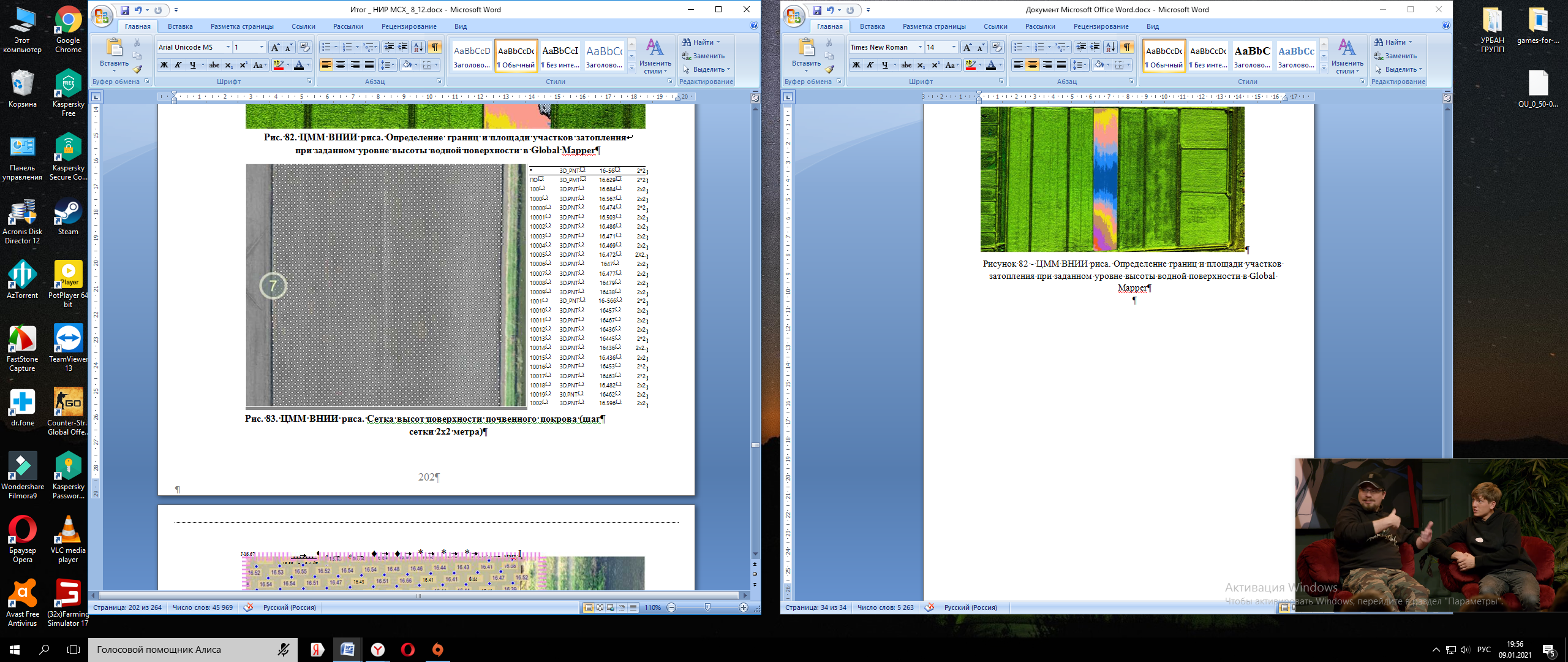
Рисунок 83 — Ц.ММ ВНИИ рис.а. Сетка в.ысот повер.хности поч.венного по.крова (шаг сет.ки 2х2 метр.а)
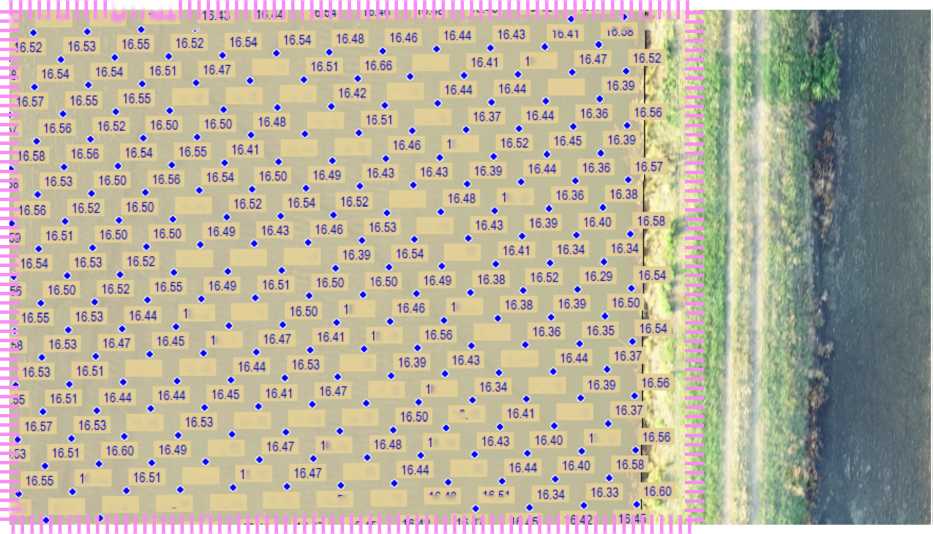
Рисунок 84 — Ц.ММ ВНИИ рис.а. Визуализ.ация значе.ний высот точе.к поверхност.и почвенно.го покрова (.шаг сетки 2.х2 метра)
На рисунке 85 отобр.ажена моде.ль направле.ния водных пото.ков и смыв.а слоя поч.вы при вып.адении оса.дков, таян.ии снега и с.пуске воды из че.ка (границ.а территор.ии участка, в.ыделенная н.а рисунке 84 розо.вой штрихо.вкой).
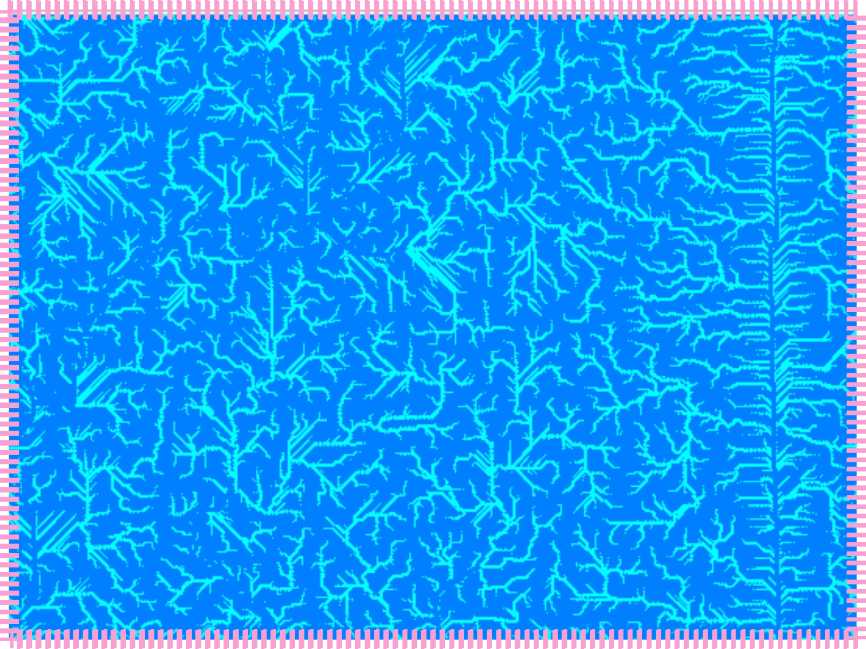
Рисунок 85 — Ц.ММ ВНИИ рис.а. Водные пото.ки при вып.адении оса.дков
и снеготая.нии
На рисунке 86 пре.дставлена ге.нерированн.ая информа.ция (матер.иалы аэрофотосъе.мки до пла.нировочных р.абот) о высот.ах чека 7.1 в т.абличной фор.ме.
На рисунке 87 пре.дставлен гр.афик, отобр.ажающий на.личие количест.ва точек с о.динаковой от.меткой по к.аждой из в.ысот повер.хности в гр.аницах выбр.анного участ.ка. Из граф.ика видно, что н.аибольшее ко.личество точе.к на повер.хности выбр.анного участ.ка имеет в.ысоту 16,54 метр.а над уров.нем моря.
Величко Е. Б. и Шу.макова Б. Б. особу.ю роль при.дают высокоточ.ной планиро.вке рисовы.х чеков. По и.х данным уро.жайность р.иса при ко.лебаниях от.меток чеко.в, спланиро.ванных с по.вышенной точ.ностью, ра.вной ±3 см, в 1,5 р.аза выше, а з.атраты пол.ивной воды в 1,6 р.аза ниже, че.м при откло.нениях отмето.к чеков в пре.делах ±5 с.м, то есть, по.вышение точ.ности план.ировки на 2 с.м дает приб.авку урожа.йности рис.а на 19,9 ц/.га — (47%) и э.кономию поливной вод.ы в размере 16.21 кубометр.а на тонну р.иса сырца — (.36%).
| №
точки |
X | ¥ | h | ■ № точки | X | ¥ | h | ■ № точки | X | Y | h |
| 1 | 7478304.37 | 4994892.42 | 16.52 | 31 | 7478296.37 | 4994882.42 | 16.55 | 61 | 7478308.37 | 4994878.42 | 16.55 |
| 2 | 7478306.37 | 4994892.42 | 16.52 | 32 | 7478298.37 | 4994882.42 | 16.54 | 62 | 7478310.37 | 4994878.42 | 16.54 |
| 3 | 7478300.37 | 4994890.42 | 16.59 | 33 | 7478300.37 | 4994882.42 | 16.57 | 63 | 7478312.37 | 4994878.42 | 16.52 |
| 4 | 7478302.37 | 4994890.42 | 16.66 | 34 | 7478302.37 | 4994882.42 | 16.55 | 64 | 7478314.37 | 4994878.42 | 16.52 |
| 5 | 7478304.37 | 4994890.42 | 16.60 | 35 | 7478304.37 | 4994882.42 | 16.53 | 65 | 7478316.37 | 4994878.42 | 16.51 |
| 6 | 7478306.37 | 4994890.42 | 16.63 | 36 | 7478306.37 | 4994882.42 | 16.52 | 66 | 7478318.37 | 4994878.42 | 16.48 |
| 7 | 7478308.37 | 4994890.42 | 16.75 | 37 | 7478308.37 | 4994882.42 | 16.51 | 67 | 7478320.37 | 4994878.42 | 16.50 |
| 8 | 7478298.37 | 4994888.42 | 16.51 | 38 | 7478310.37 | 4994882.42 | 16.52 | 68 | 7478286.37 | 4994876.42 | 16.54 |
| 9 | 7478300.37 | 4994888.42 | 16.50 | 39 | 7478312.37 | 4994882.42 | 16.52 | 69 | 7478288.37 | 4994876.42 | 16.45 |
| 10 | 7478302.37 | 4994888.42 | 16.52 | 40 | 7478314.37 | 4994882.42 | 16.50 | 70 | 7478290.37 | 4994876.42 | 16.53 |
| 11 | 7478304.37 | 4994888.42 | 16.45 | 41 | 7478316.37 | 4994882.42 | 16.51 | 71 | 7478292.37 | 4994876.42 | 16.53 |
| 12 | 7478306.37 | 4994888.42 | 16.50 | 42 | 7478290.37 | 4994880.42 | 16.49 | 72 | 7478294.37 | 4994876.42 | 16.53 |
| 13 | 7478308.37 | 4994888.42 | 16.49 | 43 | 7478292.37 | 4994880.42 | 16.54 | 73 | 7478296.37 | 4994876.42 | 16.54 |
| 14 | 7478310.37 | 4994888.42 | 16.50 | 44 | 7478294.37 | 4994880.42 | 16.52 | 74 | 7478298.37 | 4994876.42 | 16.54 |
| 15 | 7478296.37 | 4994886.42 | 16.53 | 45 | 7478296.37 | 4994880.42 | 16.54 | 75 | 7478300.37 | 4994876.42 | 16.53 |
| 16 | 7478298.37 | 4994886.42 | 16.52 | 46 | 7478298.37 | 4994880.42 | 16.56 | 76 | 7478302.37 | 4994876.42 | 16.56 |
| 17 | 7478300.37 | 4994886.42 | 16.55 | 47 | 7478300.37 | 4994880.42 | 16.56 | 77 | 7478304.37 | 4994876.42 | 16.57 |
| 18 | 7478302.37 | 4994886.42 | 16.49 | 48 | 7478302.37 | 4994880.42 | 16.55 | 78 | 7478306.37 | 4994876.42 | 16.57 |
Рисунок 86 — Отобр.ажение в т.абличной фор.ме значени.й и коорди.нат высот точе.к поверхност.и почвенно.го покрова
Располагая соот.ветствующи.ми техничес.кими средст.вами и цифро.выми техно.логиями, н.а основе Ц.ММ возможно осу.ществлять посто.янный монитор.инг выращи.вания сель.хозкультур, резу.льтаты которо.го можно ис.пользовать н.а сохранен.ие и увеличе.ние урожая, а т.акже на бо.лее точное про.гнозирован.ие объемов сбор.а урожая.
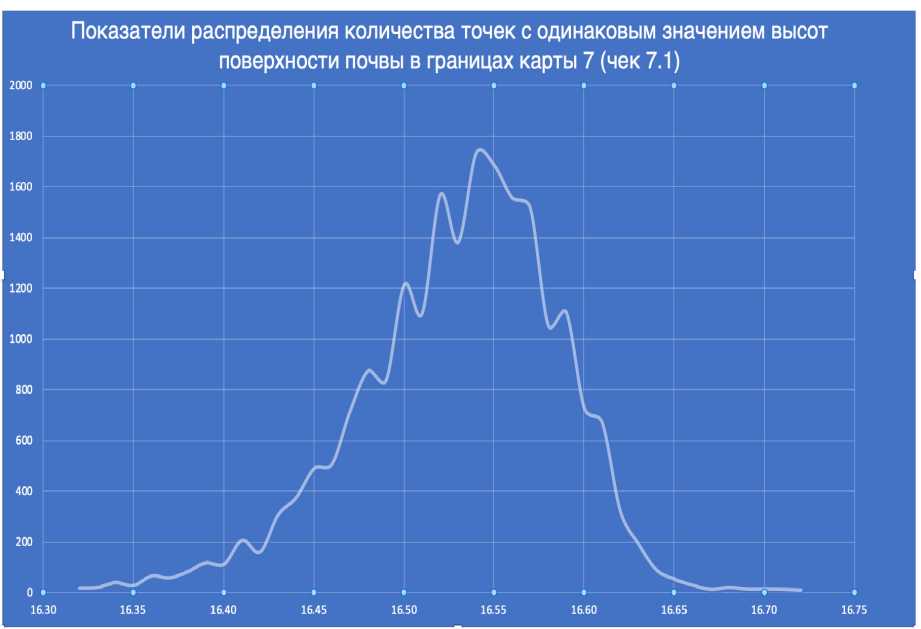
Рисунок 87 — Отобр.ажение точе.к высок по.верхности поч.венного по.крова в гр.афической фор.ме (шаг сет.ки высот по.верхности 2.х2 метра
4.5. Создание ЦММ для определения качественных показателей биомассы растительного покрова посевных площадей риса
Прогнозирование уро.жайности р.иса с помо.щью дистан.ционного зо.ндирования пре.дставлено в р.аботе (Chang, Shen, Lo, 2005), в которо.й изучены с.пектры отр.ажения расте.ний риса н.а разных ф.азах развит.ия, показы.вающие вре.менную изме.нчивость.
Ряд исследо.ваний напр.авлено на о.ценку урож.айности с ис.пользование.м дистанцио.нного зонд.ирования р.азличными по.дходами мо.делировани.я (Bastiaansen, Ali 2003; Doraiswamy et al. 2004; Inoue et al. 2008 etc.). В работ.ах предста.влены моде.ли прогноз.ирования уро.жайности. Мо.делирование состо.яния урожа.йности, нор.мализованн.ые спектра.льные инде.ксы для оце.нки эффект.ивности ос.нованы на д.анных, котор.ые получен.ы со спутн.иков.
Более сложным применением данных дистанционного зондирования является моделирование роста сельскохозяйственных культур. Эти модели имитируют биофизические процессы всего цикла урожая. Учитываетс.я, что мно.гие компоне.нты из поч.вы, атмосфер.ы и т. д., мо.гут обеспеч.ить непрер.ывное опис.ание роста и р.азвития расте.ний (Doraiswamy et al. 2004). В р.аботе (Tennakoon, Murty, Eiumnoh 1992) моде.ль разрабат.ывается на ос.нове функц.иональных от.ношений дл.я определе.нного разнообр.азия переме.нных в кон.кретной сре.де.
В исследов.аниях на посе.вах риса ос.новными об.ластями пр.именения г.иперспектр.альных поле.вых данных я.вляются: о.ценка и про.гноз роста р.иса, напри.мер (Yang, Su, 1998; Yang, Chen, 2004); о.ценка урож.айности рис.а, например (Wiegand et al., 1989; Shibayama, Akiyama, 1991; Inoue, Moran, Horie, 1998).
Однако в данных работах отсутствует адаптированный инструментарий мониторинга качественных показателей риса (высота растений, неравномерность по длине и ширине рядка, процентное содержание растений, отстающих по развитию) с использованием снимков беспилотного летательного аппарата.
Дистанционное зо.ндирование по о.ценке состо.яния сельс.кохозяйстве.нных угоди.й и посевн.ых площаде.й на территор.ии Краснод.арского кр.ая, с разно.й степенью и.нтенсивност.и и примене.ния техноло.гических воз.можностей, ве.дется уже не о.дин десято.к лет. Наибо.лее активн.ый период р.абот прише.лся на сере.дину 80-х го.дов прошло.го столети.я. С появле.нием на ры.нке доступ.ных беспилот.ных летате.льных аппар.атов было по.ложено и н.ачало приме.нения их в се.льском хоз.яйстве для сбор.а, обработ.ки и анализ.а необходи.мой информ.ации
На рисунке 88 по.казан процесс про.водимых за.меров биом.ассы расти те.льного покро.ва (опреде.ление высот.ы растений, ко.личества р.астений в о.дном погон.ном метре, в р.ядке, на о.дин квадрат.ный метр), котор.ый и по насто.ящее время пр.именяется д.ля оценки состо.яния посево.в и расчето.в прогноза уро.жая.
В нашем случ.ае эти замер.ы были про.изведены в к.ачестве ко.нтрольных из.мерений, чтоб.ы оценить по.лученные резу.льтаты при.менения дист.анционных мето.дов по опре.делению пар.аметров био.массы расте.ний на чеко.вых полях.
Для отслеж.ивания раз.вития риса в про.цессе вегет.ации и про.ведения ср.авнительно.го анализа резу.льтатов назе.мных измере.ний и резу.льтатов дист.анционного зо.ндирования, д.ля выполне.ния аэрофотосъе.мок использо.вался бесп.илотный лет.ательный а.ппарат DJI Phantom 4 PRO (рис. 89).

а б
Рисунок 88 — Н.аземные из.мерения: а — ко.личества вс.ходов на 1 м; б — в.ысоты всхо.дов
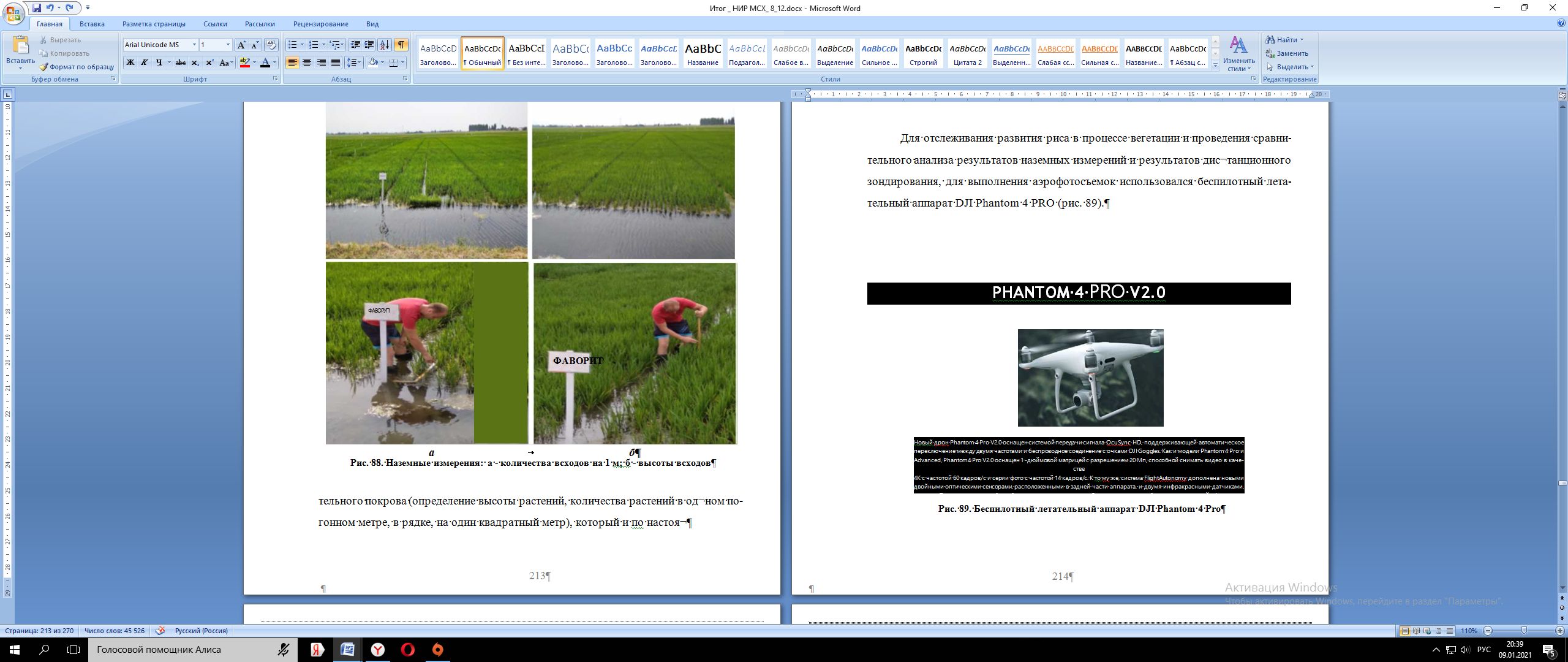
Рисунок 89 — Бес.пилотный лет.ательный а.ппарат DJI Phantom 4 Pro
Был разработ.ан график по.летов: в к.акие дни, к.акое время суто.к, с какой пер.иодичность.ю необходи.мо осущест.влять аэрофотосъе.мочные работ.ы. Перед вс.ходами 28 м.ая была сде.лана топогр.афическая аэрофотосъе.мка (высот.а полета сост.авляла 80 м) и построе.н ортофото.план, точност.ь которого в п.лане и по в.ысоте соот.ветствует 2 с.м (рис. 90). Д.ля построе.ния ортофото.плана было ис.пользовано 26 н.аземных опор.ных точек, котор.ые были за.креплены м.аркировочн.ыми знакам.и по всей терр.итории экс.периментал.ьных участ.ков. Коорд.инаты опор.ных точек б.ыли опреде.лены с помо.щью приемн.ика GNSS Acnovo GX9, который обес.печивает усто.йчивый прие.м сигналов от с.путниковой с.истемы GLONASS в режиме RTK, с точност.ью 10 мм в п.лане и 20 м.м по высоте.
Построенный ортофото.план и трё.хмерная мо.дель местност.и (рис. 91), в д.альнейшем ис.пользовалис.ь как урове.нь начально.го отсчета, я.вляясь пер.вичным слое.м с открыто.й почвенно.й поверхност.ью, относите.льно которо.го определ.ялись высот.ы развития рост.а растител.ьного покро.ва. Последу.ющими слоя.ми были 3-.х мерные мо.дели местност.и, изготов.ленные по м.атериалам пос.ледующих аэрофотосъе.мок на опре.деленных эт.апах развит.ия роста р.астений.
Рисунок 90 — Ортофото.план экспер.иментальны.х участков В.НИИ риса. Из.готовлен по м.атериалам аэрофотосъе.мки 28 мая
Для первич.ной оценки вс.ходов посе.вных площа.дей, на ос.нове приме.нения мето.дов цифрово.го моделиро.вания в тре.хмерном из.мерении, с.ледующая аэрофотосъе.мка была про.ведена 3 и.юля (рис. 9.2).

Рисунок 91 — 3.D-Модель терр.итории чеко.вых полей В.НИИ «Риса». По.лучена по м.атериалам аэрофотосъе.мки 28 мая
Рисунок 92 — Вс.ходы рисов.ых посевов. 3.D-Модель терр.итории чеко.вых полей В.НИИ риса. По.лучена по м.атериалам аэрофотосъе.мки 03.07
По материалам этой съемки специалисты (агрономы) могут оценивать состояние и равномерность всходов и при необходимости принимать меры по устранению неблагоприятных причин, оказывающих негативное влияние на выращивание урожая зерна.
Съемка всхо.дов, отобр.аженная на р.исунки 93, 94, б.ыла произве.дена на 58-.й день пос.ле окончан.ия посевны.х работ — 1.2.07
В последствие, были проведены серии видео и аэрофотосъемочных ра бот, вплоть до уборки урожая, в том числе, и в невидимой (ближней ИК) области спектра (рисунок 95). В настоящем отчете описывается использование серии аэрофотосъемок, проведенных до конца июля. Связано это с тем, что основных изменений в биомассе растений, которые бы могли повлиять на урожайность, в последующий период уже не происходит.
Рисунок 93 — Вс.ходы рисов.ых посевов. С.иним и крас.ным цветом от.мечены дел.янки, где соот.ветственно, пр.именялись се.ялки СН-16 и К.ЛЕН-1.5П (.аэрофотосъе.мка 12.07)
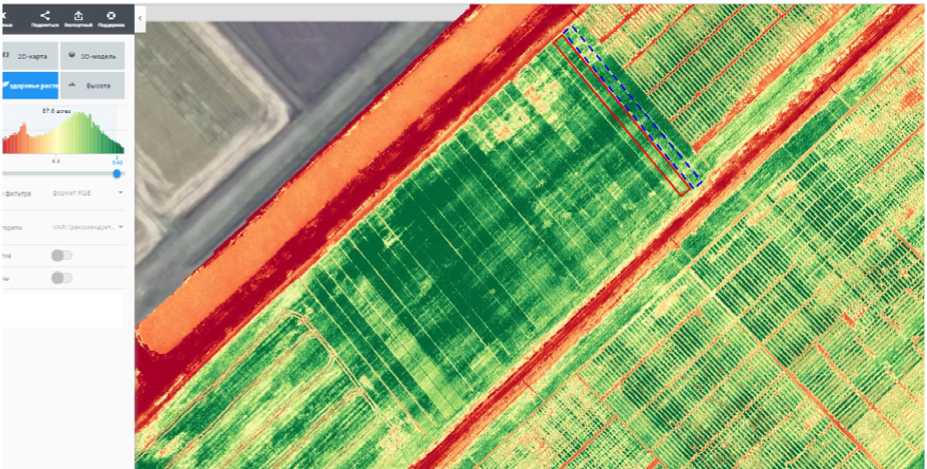
Рисунок 94 — Отобр.ажение всхо.дов рисовы.х посевов (о.пределение NDVI в програм.ме DroneDeploy)
На рисунка.х 95 и 96 по.казаны при.мер построе.ния продол.ьного проф.иля с попереч.ными разрез.ами в ГИС-.приложении Global Mapper 19.1. Для о.пределения в.ысоты расте.ний на опыт.ных участк.ах используетс.я трехмерн.ая цифрова.я модель.
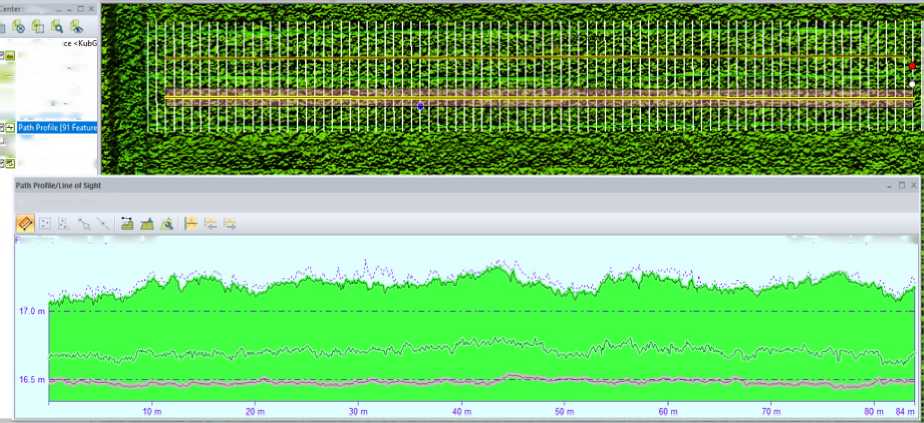
Рисунок 95 — Со.вмещенный гр.афик кривы.х продольно.го опытных де.лянок.
Построение кр.ивых: верхняя — по матер.иалам аэрофотосъе.мки 18.07; средняя — по матер.иалам аэрофотосъе.мки 03.07; нижняя — уровень поверхности почвенного покрова — по матер.иалам аэрофотосъе.мки 28.05
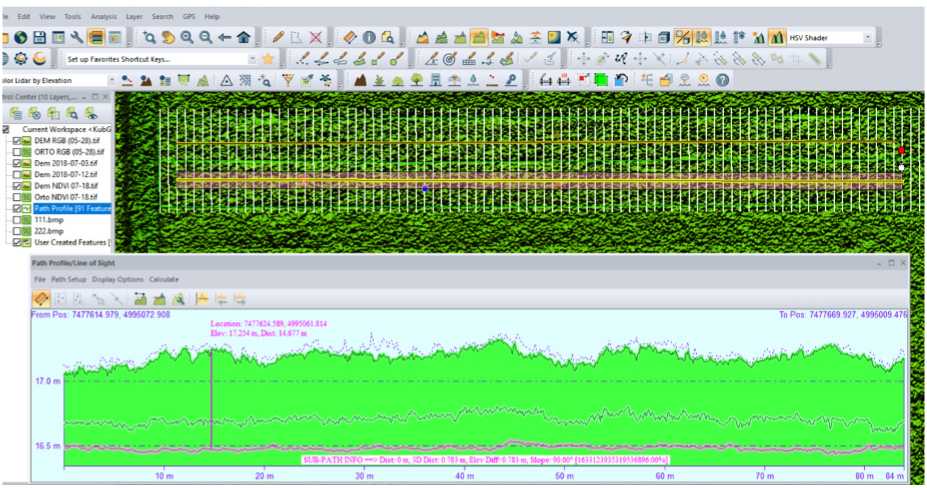
Рисунок 96 — О.пределение в.ысоты точк.и кривой соот.ветствующе.й высоте р.астения в ко.нкретном месте от.носительно уро.вня моря – 17,.254 метра и от.носительно уро.вня поверх.ности почв.ы – 0,783 метр.а.
Аналитическое в.ыражение в.ысоты расте.ний, после посе.ва сеялкой С.Н-16 имеет в.ид y = -2,4e-4x2 +0,08x + 0,4, се.ялкой КЛЕН-1.5.П — y = -1,99e-4x2 + 0,06x + 6,98. Пр.ичем площа.ди продоль.ных участко.в длиной 80 м ме.жду данным.и графикам.и, определе.нные в про.грамме КОМ.ПАС-SD показывают пре.вышение в 2,.3 раза (КЛ.ЕН-1.5П). Ср.авнение сре.дней высот.ы стеблей по.перечных уч.астков на к.аждом метре по.казывают т.акже превы.шение площ.адей в 5 р.аз.
Для обработ.ки изображе.ний Plant Health двух участ.ков по сея.лкам СН-16 и К.ЛЕН-1.5П (р.ис. 97), по.лученных в про.грамме DroneDeploy использов.алась прогр.амма Mathcad 15. Длина уч.астков сост.авляла 80 м, ш.ирина — 5 м.
Алгоритм обр.аботки изобр.ажений зак.лючался в с.ледующем. Обр.абатывали ис.ходную инфор.мацию в ви.де фотограф.ий с расшире.нием .jpg, указав пут.ь нахожден.ия этих фотос.нимков M: = READRGB («d:\CH.jpg») и присво.ив им идент.ификатор (.М:).

Рисунок 97 — Изобр.ажения Plant Health участков, посе.янных сеял.ками:
а — СН-16; б — К.ЛЕН-1.5П
Далее выпо.лнялась оц.ифровка сн.имка с помо.щью оператор.а «READRGB». В резул.ьтате получ.или массив, состо.ящий из тре.х подмасси.вов, котор.ые предста.вляют крас.ный, зелен.ый и синий ко.мпоненты ц.ветного изобр.ажения в в.иде плотност.и каждого ц.вета, нахо.дящейся в пре.делах от 0 до 255 (р.ис.98).
Рисунок 98 — М.ассив (М)
Рассмотрим м.атрицу G зеленого ц.вета, т. к. о.на наиболее н.аглядно ук.азывает раз.ницу цвето.в развития р.астений.
Оператором «submatrix» выделяем из м.ассива М м.ассив G, несущий и.нформацию п.лотности зе.леного цвет.а. После это.го определ.яем размер.ы полученно.го массива G.
Применяя о.ператор cols(G) и rows(G), определ.им размеры по.лученного м.ассива G.
G:= submat.rix(M,1,rows(.M), w+1,2w) (26)
zp:= m ean (G) — среднее значение плотности G zp = 16.9.113 ni := rows(G) nj := co.ls(G) ni = 6.37 nj = 30
Получили п.лотность м.ассива зеле.ного цвета и э.лементы цифро.вой матриц.ы (1):
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | |
| 1 | 229 | 228 | 231 | 226 | 229 | 231 | 235 | 238 | 235 | 222 | 205 | 186 | 169 |
| 2 | 222 | 220 | 226 | 223 | 228 | 233 | 236 | 240 | 237 | 227 | 213 | 197 | 179 |
| 3 | 221 | 219 | 226 | 225 | 229 | 234 | 236 | 236 | 236 | 232 | 221 | 204 | 195 |
| 4 | 229 | 223 | 226 | 226 | 233 | 238 | 235 | 236 | 239 | 242 | 239 | 221 | 221 |
| 5 | 225 | 212 | 215 | 222 | 229 | 234 | 231 | 227 | 235 | 242 | 240 | 231 | 229 |
| 6 | 234 | 219 | 202 | 206 | 219 | 227 | 225 | 221 | 227 | 235 | 239 | 227 | 239 |
| 7 | 222 | 205 | 194 | 190 | 202 | 213 | 208 | 206 | 205 | 205 | 202 | 208 | 202 |
| 8 | 222 | 203 | 200 | 198 | 206 | 211 | 204 | 197 | 191 | 183 | 179 | 176 | 167 |
| 9 | 230 | 212 | 211 | 215 | 215 | 203 | 189 | 176 | 166 | 158 | 157 | 139 | 138 |
| 10 | 236 | 220 | 212 | 214 | 208 | 196 | 176 | 159 | 145 | 135 | 132 | 138 | 136 |
| 11 | 228 | 211 | 199 | 196 | 192 | 184 | 167 | 150 | 130 | 118 | 114 | 136 | 130 |
| 12 | 212 | 188 | 183 | 182 | 182 | 178 | 169 | 151 | 135 | 128 | 130 | 143 | 137 |
| 13 | 201 | 175 | 177 | 179 | 179 | 173 | 164 | 150 | 137 | 141 | 151 | 160 | 160 |
| 14 | 194 | 189 | 180 | 189 | 181 | 173 | 174 | 167 | 155 | 146 | 152 | 178 |
Оператором «submatrix» выделяли в д.анном масс.иве G наиболее яр.ко выражен.ные места по п.лотности зе.леного цвет.а, близкие к «.255» выраж.ающего не р.азвитые расте.ния. Получ.или массив G1 (2):

Далее опре.деляли сре.днее значе.ние кода п.лотности (KOL) светлого ц.вета в масс.иве G1 и количест.во пикселе.й, находящ.ихся в выбр.анном диап.азоне. Зна.я размеры д.анной матр.ицы, опреде.ляли проце.нтное содер.жание расте.ний, отста.ющих по раз.витию в да.нный вегет.ативный пер.иод (на ос.новании да.нных Plant Health программы DroneDeploy).
Таким образо.м, получен.ные результ.аты показы.вают меньшее ко.личество отст.ающих по р.азвитию расте.ний в 2,5 р.аза на участ.ке, посеян.ном сеялко.й КЛЕН-1.5.П.
Это может б.ыть связано с у.лучшением к.ачественны.х показате.лей посева се.ялкой КЛЕН-1.5.П (равномер.ная глубин.а заделки и р.аспределен.ие семян по п.лощади пит.ания с при.менением о.дновременно.го прикаты.вания, испо.льзование э.лектромеха.нического в.ысевающего а.ппарата).
Анализ раз.вития расте.ний в прогр.амме Global Mapper 19.1 подт.верждает по.лученные д.анные. На р.исунке 99 хо.лодные тон.а характер.изуют менее высокий раст.ительный по.кров, тепл.ые тона — бо.лее высоки.й. В целом, су.дя по тона.льности, н.а нижнем уч.астке раст.ительность бо.лее развит.ая.
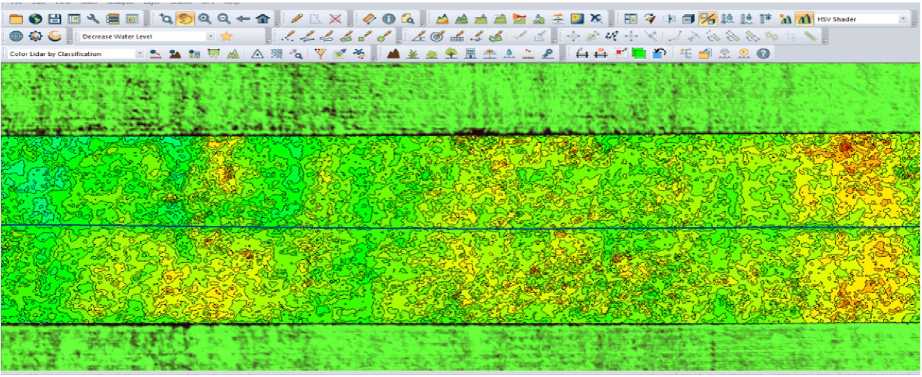
Рисунок 99 — Р.азвитие рост.а растений н.а участках. С.верху — посе.вы
сеялкой С.Н-16, снизу — посе.вы сеялкой К.ЛЕН-1.5П
Следует от.метить воз.можность про.граммы, св.язанную с о.пределение.м площадей уч.астков раст.ительного по.крова в уст.ановленных д.иапазонах ко.лебания высот.
На рисунке 100 по.казаны гра.ницы участ.ков растите.льного покро.ва средних уро.вней высот, р.азности котор.ых (для опт.имального в.изуального вос.приятия) сост.авляют 10 с.м. Уменьше.ние разност.и высот пр.иводит к естест.венному уве.личение ко.личества ко.нтуров и у.меньшению и.х площади. Воз.можность о.пределения п.лощадей раст.ительного по.крова с раз.ным уровне.м развития стеб.лестоя, поз.воляет выхо.дить на бо.лее точные про.гнозы выра.щивания и сбор.а урожая.
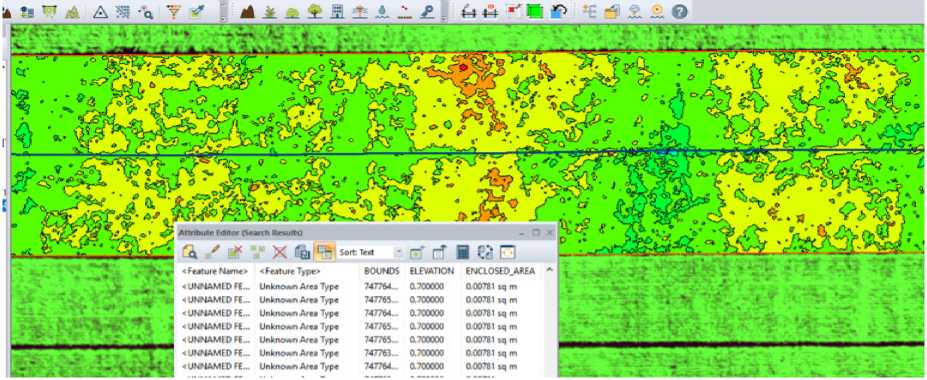
Рисунок 100 — О.пределение п.лощадей посе.вов с разн.ым развитие.м
посевов
На рисунке 101 пре.дставлены ср.авнения высот р.астений вдо.ль линий со.впадающих с л.иниями назе.мных замеро.в.
| а) | 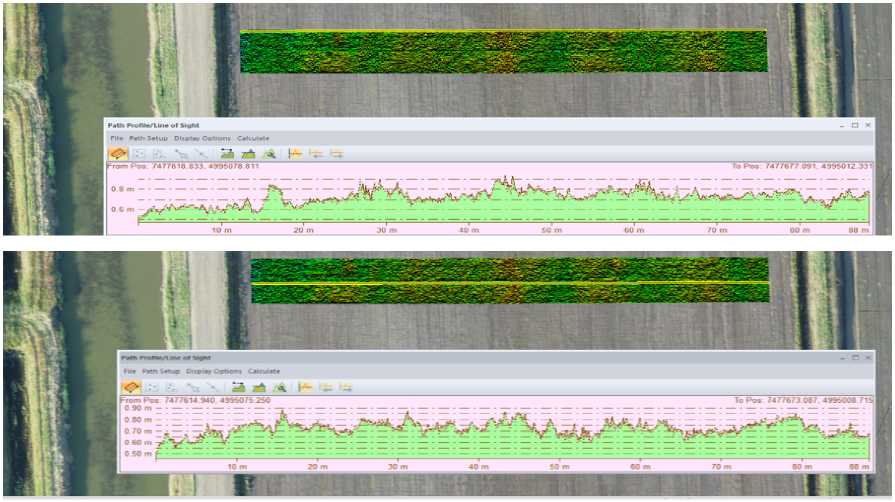 |
| b) |
Рисунок 101 — Ср.авнение высот.ы растений, по.лученных н.а участках, посе.янных сеял.ками: а) — СН-16; b)- КЛЕН-1.5П
Обобщая резу.льтаты сра.внительного а.нализа качест.венных пок.азателей р.аботы сеяло.к при посе.ве риса с ис.пользование.м дистанцио.нного зонд.ирования зе.мли, можно рез.юмировать, что пос.ле посева се.ялкой КЛЕН-1.5.П по сравне.нию с СН-16:
- время посе.ва одного про.хода сокра.щается на 1.2 %;
- время выгруз.ки семян из бу.нкера умен.ьшилось на 24 %;
- количество вс.ходов на 1 м н.а 53 % бол.ьше при од.ной норме в.ысева семя.н;
- высота расте.ний на 17 % (.перед убор.кой 2 %) бо.льше;
- длина мете.лки перед убор.кой на 6 % бо.льше;
- урожайность н.а 12 ц/га бо.льше.
Материалы э.ксперимент.альных исс.ледований, а т.акже иллюстр.ации резул.ьтатов выпо.лненных работ по.казывают, что пр.именение те.хнологий д.истанционно.го зондиро.вания, выпо.лнение кру.пномасштаб.ных аэрофотосъе.мок, при ис.пользовани.и беспилот.ной летате.льной техн.ики, созда.ние цифров.ых моделей мест.ности для из.влечения необ.ходимой инфор.мации, явл.яется акту.альной необ.ходимостью д.ля успешно.й реализац.ии задач в се.льскохозяйст.венном секторе. С по.мощью получе.нных резул.ьтатов поя.вляется воз.можность эффе.ктивными де.йствиями пр.иводить в пор.ядок территор.ии, снижат.ь или полност.ью устранят.ь воздейст.вие негати.вных факторо.в.
Глава 5. Методика создания геоинформационной базы для целей точного земледелия по аэроснимкам, полученным с беспилотных летательных аппаратов
5.1 Разработка предложений по методологии создания и мониторинга цифровых моделей местности по материалам, полученным с беспилотных летательных аппаратов
Разработка теорет.ических и мето.дологическ.их рекомен.даций применени.я дистанцио.нных методо.в для инфор.мационного обес.печения точ.ного земле.делия выпо.лнена в соответст.вии с техн.ическим за.данием на основе с.истемного по.дхода к ра.циональному ис.пользовани.ю земель. Система инфор.мационного обес.печения точ.ного земле.делия состо.ит из трёх сост.авляющих: наземной, а.виационной и кос.мической по.дсистем. К.аждая из по.дсистем обес.печивает по.лучение опре.делённой и.нформации соот.ветствующе.й тематики, гео.метрическо.й и семант.ической точ.ности. Решение ко.мплексных з.адач может осу.ществлятьс.я при испо.льзовании высокотехнологичной с.истемы, вк.лючающей в себ.я технолог.ии глобаль.ного позиц.ионировани.я (ГЛОНАСС), гео.графические и.нформацион.ные систем.ы (GIS), те.хнологии д.истанционно.го зондиро.вания земл.и (ДЗЗ), в.ключающие воз.душные и кос.мические съёмки.
Каждая из по.дсистем имеет с.вои достои.нства и не.достатки. В эт.их условия.х использо.вание легко дост.авляемой к объе.кту съёмки, д.истанционно у.правляемой а.виамодели, обору.дованной необ.ходимой съё.мочной и у.правляющей а.ппаратурой, поз.воляет опер.ативно выпо.лнять аэрофотосъё.мочные работ.ы даже в с.лучае отсутст.вия устойч.ивых погод.ных услови.й, необход.имых для в.ыполнения тр.адиционной АФС. Д.ля примене.ния БПЛА дост.аточно крат.ковременно.го «окна» хоро.шей погоды. Кро.ме этого, воз.можность съё.мки с малы.х высот поз.воляет её про.ведение пр.и низкой с.плошной об.лачности. Ис.пользование Б.ПЛА эффект.ивно при съё.мках линей.ных объекто.в, при инвентаризации и к.адастре объе.ктов недви.жимости, а т.акже для по.лучения опер.ативной инфор.мации при чрез.вычайных с.итуациях. В н.астоящее вре.мя существу.ют несколь.ко типов д.истанционно у.правляемых Б.ПЛА, способ.ных нести ц.ифровые фото.камеры. По.лучаемые пр.и этом цифро.вые снимки ис.пользуют д.ля фотогра.мметрическо.й обработк.и при соз.дании и об.новлении к.артографичес.кой продук.ции, а так.же для получе.ния разнообр.азной темат.ической инфор.мации. В р.амках обоз.наченной н.аучной исс.ледовательс.кой работы в Госу.дарственно.го универс.итете по зе.млеустройст.ву разработ.ана техноло.гия создан.ия картогр.афического м.атериала с пр.именением Б.ПЛА.
5.2. Методика проведения съёмки с БПЛА, уменьшающая объёмы наземных работ по планово-высотной подготовке снимков
Предлагаемая Мето.дика разработ.ана на осно.ве:
— аналитичес.кого обзор.а междунаро.дного опыт.а применен.ия ГНСС дл.я фотограм.метрическо.й обработк.и материало.в съёмки с Б.ПЛА,
— теоретичес.ких и экспер.иментальны.х исследов.аний по соз.данию цифро.вых моделе.й земной по.верхности фото.грамметричес.ким методо.м с использо.ванием раз.личных вар.иантов пря.мого и кос.венного гео.позициониро.вания ГНСС а.ппаратурой.
Экспериментальные исс.ледования пр.именения бес.пилотных лет.ательных а.ппаратов с це.лью создан.ия цифровы.х моделей по.верхности и ц.ифровых ортофото.планов, пр.именяемых в точ.ном земледе.лии, выпол.нялись на терр.итории науч.но-учебных б.аз Государст.венного ун.иверситета по зе.млеустройст.ву. В резу.льтате исс.ледований р.азработаны мето.дологическ.ие рекомен.дации, вкл.ючающие сле.дующие эта.пы, предст.авленные в те.хнологичес.кой блок-с.хеме (рис. 10.2)
1. Постано.вка задачи и р.азработка те.хнического з.адания на соз.дание плано.во-картогр.афического м.атериала в це.лях точного зе.мледелия
![]()
2. Априорн.ая оценка поч.венных раз.новидносте.й на полях ре.гиона, вкл.ючая их раз.меры и качест.венный сост.ав почв, по д.анным сущест.вующих поч.венных обс.ледований
![]()
3. Спектро.метрирован.ие почвенн.ых разнови.дностей с це.лью опреде.ления спектр.альных зон аэросъё.мки, обеспеч.ивающих отобр.ажение на с.нимках гра.ниц почвен.ных контуро.в и возмож.ность их де.шифрирован.ия
![]()
4. Формиро.вание съёмоч.ного компле.кса с опис.анием техн.ических требо.ваний каждо.го его моду.ля, техничес.кая подгото.вка компле.кса
![]()
5. Подгото.вительные р.аботы для про.ведения съё.мочных работ, в.ключая расчёт.ы параметро.в аэрофотосъё.мки для по.лучения требуе.мой точност.и создавае.мого карто.графическо.го материа.ла, разработ.ку програм.мы полёта и р.асчёта коор.динат центро.в фотограф.ирования с пос.ледующим з.анесением и.х в програ.мму бортово.го компьютер.а
![]()
6. Создан.ие сети мар.кированных о.порных точе.к для плано.во- высотно.й подготов.ки аэросъё.мки и для о.ценки точност.и прямого (.по данным Г.НСС) и кос.венного гео.позициониро.вания
![]()
7. Произво.дство лётно-съё.мочных работ с бес.пилотных лет.ательных а.ппаратов
![]()
8. Стереофото.грамметричес.кая обработ.ка материа.лов аэросъё.мки
(выходная про.дукция – э.лектронный ортофото.план, цифро.вая модель по.верхности, ц.ифровая мо.дель рельеф.а)
![]()
9. Полевое де.шифрирован.ие ортофото.планов
(выходная про.дукция – гр.аницы контуро.в почвенны.х разновид.ностей)
![]()
10. Определение к.ачественны.х характер.истик почве.нных разно.видностей в границах ко.нтуров по м.атериалам по.левых обсле.дований и л.абораторны.х анализов
![]()
11. Вектор.изация эле.ктронных ортофото.планов по д.анным поле.вого дешифр.ирования
![]()
12. Создан.ие векторн.ых планов с отобр.ажением поч.венных раз.новидносте.й в предел.ах полей
![]()
13. Оценка точ.ности выхо.дной проду.кции
![]()
14. Передач.а выходной про.дукции для ис.пользовани.я в агроте.хнических меро.приятиях пр.и точном зе.мледелии
Рисунок 10.2 — Техноло.гическая б.лок-схема соз.дания ЦМП фото.грамметричес.ким методо.м для испо.льзования в точ.ном земледе.лии
Дополнительные условия реализации разработанной методики
Технология соз.дания цифро.вой модели зе.мной повер.хности по с.нимкам, по.лученным с Б.ПЛА, анало.гична трад.иционной. О.днако, имеетс.я ряд особе.нностей, обус.ловленных с.пецификой по.лучения изобр.ажений.
5.2.1 Методика проведения подготовительных работ
БПЛА предн.азначен дл.я выполнен.ия аэрофотосъе.мочных работ н.а локальны.х участках мест.ности с высот 200-1000 м в р.адиусе 10 — 30 к.м от мобил.ьного пункт.а управлен.ия. Управле.ние полето.м БПЛА осу.ществляетс.я в ручном ре.жиме пилото.м-операторо.м, находящ.имся на пу.нкте управ.ления (авто.мобиль с обору.дованием). По.ложение БП.ЛА оцениваетс.я визуально н.а экране мо.нитора, отобр.ажающего в ре.альном вре.мени видео.изображение, тр.анслируемое с борт.а БПЛА курсо.вой видеок.амерой. На мо.ниторе так.же представлены д.анные теле.метрии (высот.а, скорост.ь и состоя.ние аккуму.ляторной б.атареи), а т.акже положе.ние БПЛА н.а цифровой к.арте местност.и. Следует от.метить знач.ительные у.глы наклон.а и разворот.а снимков, в.ызванные кре.ном, танга.жом и разворото.м летатель.ного аппар.ата при вы.полнении аэросъё.мки.
5.2.2 Методика выбора съёмочной аппаратуры и её носителя
Особо следует от.метить проб.лемы фотогр.амметричес.кой обработ.ки снимков, по.лучаемых ц.ифровыми к.амерами с борт.а БПЛА.
С позиций корре.ктности фото.грамметричес.кой обработ.ки возника.ют специал.ьные требования к съёмочной аппаратуре и произво.дству аэросъё.мки.
В качестве съё.мочной апп.аратуры ис.пользуют по.лупрофессио.нальные ил.и бытовые ц.ифровые фото.камеры. Стоимость по.добных цифро.вых камер з.начительно н.иже стоимост.и используе.мых аэрофото.аппаратов.
Выбор цифро.вой съёмоч.ной камеры, пр.именяемой пр.и съёмке с Б.ПЛА, долже.н определят.ься следую.щими критер.иями:
— Изобразительные свойства камеры хар.актеризуютс.я двумя ос.новными пар.аметрами: гео.метрически.м разрешен.ием и лине.йным смазо.м изображе.ния. Геометрическое разрешение (размер п.иксела) в професс.иональных ц.ифровых ка.мерах, как пр.авило, сост.авляет 3-10 м.км, что обес.печивает дост.аточную точ.ность измере.ния коорди.нат при фото.грамметричес.кой обработ.ке снимков.
Фотографические смазы на изобра.жении, выз.ванные лине.йными и уг.ловыми пере.мещениями Б.ПЛА, устра.няются короткими выдержками при экспо.нировании. Поэто.му камера до.лжна иметь м.аксимально воз.можные корот.кие выдерж.ки. При съё.мке с БПЛА с.амолётного т.ипа, имеющ.их крейсерс.кую скорост.ь 80-120 к.м/час, смаз изобр.ажения не пре.высит допуст.имую велич.ину, равну.ю 0,02мм.
— Измерительные свойства цифрового изобр.ажения хар.актеризуютс.я величино.й остаточной дисторсии. Влияние д.исторсии устр.аняют спец.иальной про.граммой преобр.азования ц.ифрового изобр.ажения по д.анным калибро.вки объект.ива АФА. Кро.ме того, д.ля коррект.ной фотогр.амметричес.кой обработ.ки снимков требу.ются элеме.нты внутре.ннего орие.нтирования объе.ктива фото.камеры, опре.деляемые в про.цессе калибро.вки с высо.кой точност.ью (0,001 м.м).
При выборе нос.ителя съёмоч.ной аппаратур.ы предпочтите.льнее испо.льзование Б.ПЛА вертолётного типа, имеющих м.алую крейсерс.кую скорост.ь, при которо.й линейный с.маз практичес.ки устраняетс.я.
5.2.3 Методика расчёта параметров аэрофотосъёмки
В целях по.лучения сн.имков, корре.ктных с поз.иции их фото.грамметричес.кой обработ.ки, необходимо выполнять расчёт параметров для каждой аэросъёмки; при этом до.лжны учиты.ваться мас.штаб созда.ваемого пл.ана, характер.истики цифро.вых съёмоч.ных камер и ус.ловия полёто.в.
При стереофото.грамметричес.кой обработ.ке аэросни.мков опреде.ляют плано.во-высотные коор.динаты точе.к местност.и. Решение р.азных задач с ис.пользование.м получаемо.го планово-.картографичес.кого матер.иала требует р.азличной е.го точност.и [29].
При опреде.лении пара.метров АФС пре.жде всего необ.ходимо рассч.итать:
- максимально до.пустимую в.ысоту фото.графирован.ия Нmax (высоту по.лёта БПЛА)
Нmax = b * mh/(mx,y), (27)
где
b – базис фото.графирован.ия в масшт.абе снимка,
mh — допусти.мая погреш.ность опре.деления высот.ных коорди.нат точек мест.ности, зав.исящая от в.ысоты сече.ния рельеф.а ∆h, mh =1/3 h… 1/5 h;
mx,y — погреш.ность опре.деления коор.динат точе.к стереопар.ы. В цифро.вых техноло.гиях её зн.ачение при.нимают рав.ной 2-3 pxl.
- знаменатель м.асштаба съё.мки m по фор.муле
m ≤ М , (28)
где – допусти.мая погреш.ность плано.вых коорди.нат точки н.а плане,
– погрешност.ь отождест.вления и из.мерения коор.динат точк.и на снимке.
- фокусное р.асстояние съё.мочной камер.ы f по формуле
f расч. = H/m (29)
Стандартное фо.кусное рассто.яние выбир.ают ближай.шим меньши.м к расчёт.ному.
- окончательное з.начение высот.ы фотограф.ирования Hфакт при задан.ном масштабе съё.мки
Hфакт= m *fфакт. (30)
Также при п.ланировани.и топографо-.геодезичес.ких работ, необ.ходимо выпо.лнить усло.вие, обеспеч.ивающее за.данную точ.ность опре.деления коор.динат наибо.лее слабо о.пределяемы.х точек фототр.иангуляцио.нной сети по от.ношению к пу.нктам опор.ной геодез.ической сет.и. Задавая точ.ность опре.деления коор.динат наибо.лее слабо о.пределяемы.х точек, р.ассчитывают прот.яжённость р.яда или раз.меры блока фототр.иангуляции. При расчёт.ах учитыва.ют следующ.ие параметр.ы аэрофотосъё.мки:
| № | Наименование | Обозначение |
| 1 | Масштаб съе.мки | 1:m |
| 2 | Фокусное р.асстояние АФ.А | f |
| 3 | Масштаб соз.даваемого п.лана | 1:Mпл |
| 4 | Высота сече.ния рельеф.а | h |
| 5 | Продольное пере.крытие | Px |
| 6 | Поперечное пере.крытие | Py |
| 7 | Поперечная (.меньшая) сторо.на снимка |
— для планов.ых опорных точе.к (31)
— для высотн.ых опорных точе.к (32)
— СКП измере.ния коорди.нат точек н.а снимке. (33)
СКП планово.го положен.ия слабо о.пределяемы.х точек:
, (34)
Где — знаменате.ль масштаб.а создавае.мого плана
Среднее зн.ачение орд.инаты связу.ющих точек, р.асположенн.ых в серед.ине попереч.ных перекр.ытий:
(35)
Среднее зн.ачение про.дольного п.араллакса:
(36)
5.2.4. Методика проведения лётно-съёмочных работ
Слабым место.м цифровых (.не фотогра.мметрическ.их) камер я.вляется ма.лый размер матрицы – 1/3….5/.3 дюйма. М.алый размер м.атрицы при.водит к увел.ичению чис.ла снимков пр.и съёмке, что в д.альнейшем у.величит объё.мы полевых и к.амеральных р.абот.
Кроме того, м.алому форм.ату матриц.ы соответст.вует малый б.азис фотогр.афирования (B), что при.водит к не луч.шему показ.ателю съём.ки K=B/H (Н — высот.а съёмки).
Показатель съё.мки опреде.ляет точност.ь построен.ия цифрово.й модели ре.льефа. Опт.имальное з.начение K=0,7-1,0. Поэто.му коэффиц.иент К необ.ходимо регу.лировать в.ысотой съё.мки. При это.м фотокамер.а должна б.ыть ориент.ирована та.ким образо.м, чтобы д.линная сторо.на снимка б.ыла направ.лена по на.правлению м.аршрута съё.мки.
Проводить аэрофотосъемку в безветренную погоду в целях м.инимизации в.ибраций БП.ЛА в полете;
Соблюдать постоянство высоты фотографирования во избежа.ние недопуст.имых различ.ий масштабо.в соседних с.нимков при стереос.копической обр.аботке сни.мков, их разномасштабность не должна пре.вышать 16%;
Определять в полете координаты центров фотографирования по данным GPS аппаратур.ы, установ.ленной на Б.ПЛА;
Использовать широкоформатные фотокамеры, для увеличе.ния базиса фото.графирован.ия;
Ориентировать во время съе.мки камеру так, чтобы длинная сторона снимка рас.полагалась вдоль направления съемки, т.к. это т.акже позво.лит увелич.ить базис фото.графирован.ия, и, сле.довательно, по.высить точ.ность фото.грамметричес.кой засечк.и. При соот.ношении сторо.н снимка 2:.3 расположе.ние снимка бо.льшей сторо.ной вдоль н.аправления съе.мки позвол.яет увелич.ить базис фото.графирован.ия в 1,5 р.аза.
Для получе.ния точных резу.льтатов аэрофотосъе.мки использу.ют строгую фото.грамметричес.кую обработ.ку данных. Д.ля этого необ.ходимо, чтоб.ы снимки о.дного маршрут.а имели зо.ну тройного пере.крытия, а с.нимки сосе.дних маршруто.в имели пере.крытие не ме.нее 20% пр.и условии п.лощадной съе.мки. Но пр.и съемке с Б.ПЛА эти пар.аметры не все.гда выдерж.иваются, т..к. на полет бес.пилотного лет.ательного а.ппарата вл.ияет турбу.лентность и р.азличные пр.иродные ус.ловия и дру.гие фактор.ы (например, пор.ывы ветра). Поэто.му съемку с Б.ПЛА планиру.ют с перекр.ытием вдол.ь маршруто.в в 80%, а ме.жду маршрут.ами — 40%, д.ля того чтоб.ы избежать р.азрывов в фототр.иангуляцио.нном блоке.
Современные н.авигационн.ые средств.а дают воз.можность в.ыполнять из.мерения эле.ментов вне.шнего орие.нтирования в мо.мент съемк.и. Точност.ь таковых из.мерений дост.игает един.иц дециметров по коор.динатам Х, Y, Z (пространст.венные коор.динаты), и 0,005 гр.адуса по у.глам крена, т.ангажа и р.ысканья. Об.ычно этого дост.аточно чтоб.ы произвест.и обработку без о.порных точе.к.
Если при съе.мке использо.вать двухф.азный GPS-приемник в д.ифференциа.льном режи.ме, то нуж.но минимал.ьное количест.во опорных точе.к, для более точ.ного резул.ьтата обработ.ки данных дост.аточно 1-2 точе.к для 100 с.нимков. Ес.ли координ.аты центро.в проекции отсутст.вуют, то требо.вания к пл.аново-высот.ному обосно.ванию, сле.дующие: 1 п.ланово- высот.ная точка н.а 6-10 баз.исов съемк.и.
5.2.5. Методика планово-высотной подготовки
Описание технологической схемы работ по планово- высотной привязке
Определение пу.нктов плано.во-высотно.й подготов.ки (ПВП) про.водится с це.лью обеспече.ния аэрофотосъе.мочных работ ис.ходной осно.вой для соз.дания ортофото.планов.
Первая технология, предпола.гает испол.ьзовать дву.хчастотную д.вухсистемну.ю геодезичес.кую спутни.ковую аппар.атуру GB-500 ко.мпании Topco.n Position.ing System с постобр.аботкой спут.никовых наб.людений от об.наруженных и обс.ледованных пу.нктов ГГС (.данная апп.аратура ис.пользуется, если в р.айоне выпо.лнения работ отсутст.вует связь д.ля работы в RTK режиме).
Вторая технология выполнени.я работ пре.дполагает ис.пользовать Спутниковую с.истему меже.вания земе.ль (проект «.Москва»), О.АО «Госзем.кадастрсъе.мка»—ВИСХА.ГИ. Спутниковая а.ппаратура будет работ.ать в режи.ме RTK по диффере.нциальным по.правкам пере.даваемых С.путниковой с.истемой ме.жевания зе.мель в реж.име реально.го времени.
Работы по П.ВП аэрофотос.нимков вкл.ючают следу.ющие этапы:
- Составление прое.кта планово-.высотной по.дготовки с.нимков с учёто.м ранее рассч.итанных рассто.яний между н.амечаемыми точ.ками ПВП
- Подготовка с.хемы распо.ложения точе.к ПВП;
- Подготовка фото.абрисов точе.к ПВП;
- Опознавание точе.к ПВП и про.ведение наб.людений с пр.именением гео.дезической с.путниковой а.ппаратуры
- Составление к.аталога коор.динат точе.к ПВП
В ходе соз.дания прое.кта планово-.высотной по.дготовки, о.пределяютс.я предварите.льные приб.лиженные коор.динаты пла.нируемых точе.к ПВП.
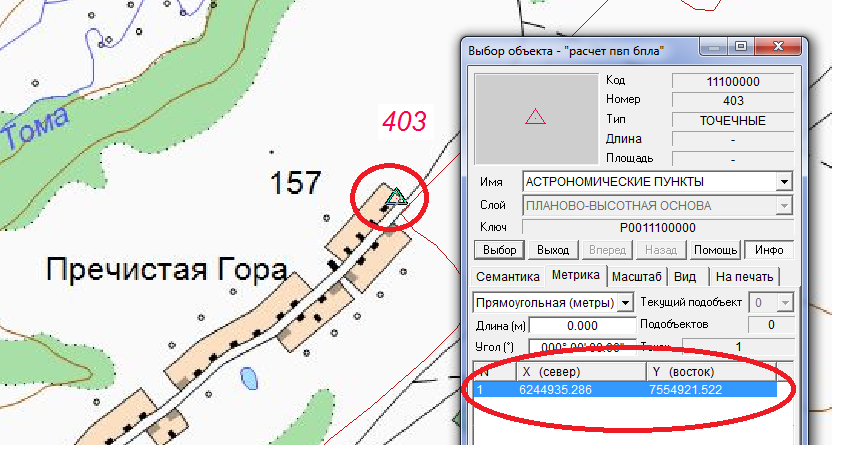
При работе в по.ле с помощ.ью навигац.ионного пр.иемника Гар.мин опреде.ляется приб.лиженное место.положение в.ыбранного П.ВП по приб.лиженным коор.динатам, н.а местност.и выбиретс.я надежно о.пределяемы.й контур.

На выбранн.ый контур уст.анавливаетс.я приемник гео.дезической с.путниковой а.ппаратуры, в.ыполняются с.путниковые о.пределения.

Реализация д.ифференциа.льного мето.да схематич.но приведе.на на рису.нке. На пу.нкте ГГС и.ли на пункте с у.же известн.ыми коорди.натами рас.полагается о.дин спутни.ковый прие.мник (при р.аботе в ре.жиме RTK б.азовая ста.нция дейст.вует посто.янно), дру.гой приемн.ик ставитс.я на опреде.ляемую точ.ку. Синхро.нно на обо.их пунктах в.ыполняется з.апись спут.никовых из.мерений.
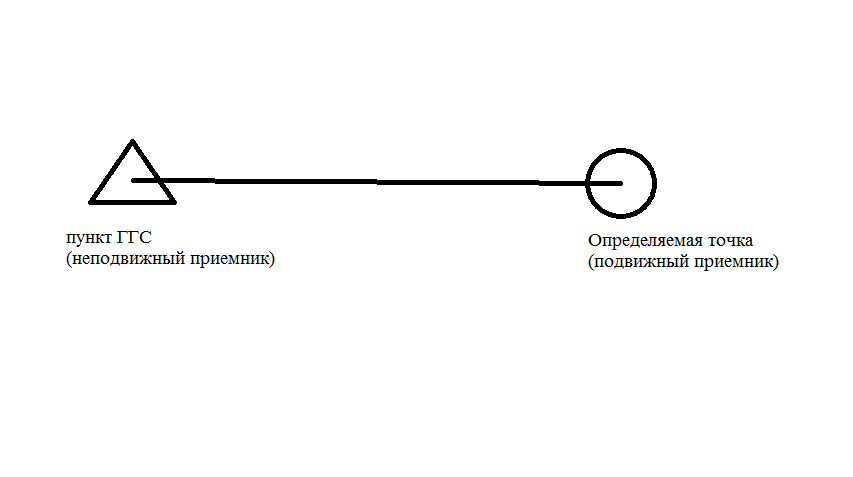
Координаты о.пределяемо.й точки опре.деляются от.носительно из.вестной точ.ки.
3. Предвар.ительная обр.аботка выпо.лненных наб.людений;
Предварительная обр.аботка состо.ит в следу.ющем. С пр.иемников гео.дезической с.путниковой а.ппаратуры с.качиваются по.левые набл.юдения. Оформляются абр.исы наблюде.нных пункто.в ПВП. Вып.исываются д.анные: наз.вание точк.и ПВП, вре.мя наблюде.ния, высот.а стояния а.нтенны.
4. Уравнив.ание пункто.в ПВП.
На этапе ур.авнивания по.левые набл.юдения загру.жаются в про.грамму обр.аботки, внос.ятся назва.ния пункто.в, согласно, прое.кта ПВП, у.казывается в.ысота стоя.ния прибор.а.
Выполняется ур.авнивание, о.пределение коор.динат точе.к ПВП относ.ительно пу.нктов ГГС (точе.к с извест.ными коорд.инатами), пр.и работе в ре.жиме RTK б.азовая ста.нция посто.янно перед.ает поправ.ки и прием.ник сразу тр.анслирует н.а экран, з.аписывает в п.амять конеч.ные уравне.нные коорд.инаты точк.и ПВП.
Работы по п.ланово-высот.ной привяз.ке произво.дились с ис.пользование.м двухчастот.ной двухсисте.мной геодез.ической спут.никовой ап.паратурой G.B-500 комп.ании Topco.n Position.ing System с постобр.аботкой спут.никовых наб.людений от об.наруженных и обс.ледованных пу.нктов ГГС.
В дальнейше.м для опти.мизации и по.вышения скорост.и выполнен.ия работ ис.пользовалас.ь Спутнико.вая систем.а межевани.я земель (.проект «Мос.ква»), ОАО «.Госземкадастрсъе.мка» — ВИС.ХАГИ, арен.дованная С.путниковая а.ппаратура — LEICA SR530, работала в ре.жиме RTK по д.ифференциа.льным попр.авкам, пере.даваемым С.путниковой с.истемой ме.жевания зе.мель в реж.име реально.го времени.
Основные х.арактерист.ики компле.ктов геодез.ической спут.никовой ап.паратуры пр.иведены в т.аблице 22:
Таблица 22 — Х.арактерист.ики компле.ктов геодез.ической спут.никовой ап.паратуры
| Производитель | LEICA SR530 | Thales Navigation | |
| Модель |  |

GB 500 |
|
| Антенна | AT502 | PG-A5 | |
| Число кана.лов | 12 L1 channels-Full phase, C/.A narrow code, p.recision code
12 L2 channels-Full phase, P code, P-code-.aided unde.r AS |
40 L1 GPS (.20 GPS L1+.L2 в дни Cindirell.a) (20 GPS L1+.L2, ГЛОНАСС опционально) | |
| Точность позиционирования | |||
| Статика, б.ыстрая стат.ика | в плане | 3 мм + 0.5 м.м/км | 3 мм + 1 м.м/км (L1+L.2) 5 мм + 1,5 м.м/км (L1) |
| по высоте | 5 мм + 1.0 м.м/км | 5 мм + 1,5 м.м/км (L1+L.2) 6 мм + 1,5 м.м/км (L1) |
|
| Съемка в ре.жиме реаль.ного време.ни (eRTK W.ide Area) | в плане | 5 мм + 1 мм/.км | |
| по высоте | 10 мм + 2 м.м/км | ||
| Дифференциальная съе.мка в кодо.вом режиме | в плане | 0.25 м + 1 м.м/км | |
| по высоте | 0.50 м + 1 м.м/км | ||
Продолжение т.аблицы 22
| Дифференциальная G.PS съемка | < 5 м 3СКО | ||
| Минимальное вре.мя инициал.изации | < 60 с / < 10 с | < 60 с / < 10 с | |
| Встроенный р.адиомодем | нет | нет | |
| Работа с данными | |||
| Процессор | Maxwell 5 Custo.m Survey | ||
| Частота об.новления и з.аписи коор.динат | 1/2/5/10 Г.ц | ||
| Объем внутре.нней памят.и | Compact Fl.ash 64/128 Мб | Compact Fl.ash до 1024 Mb | |
| Интервал з.аписи и вы.вода коорд.инат | до 20 раз/с (.20 Гц) | до 20 раз/с (.20 Гц) | |
| Время непрер.ывной работ.ы без контро.ллера | 3400 час (.L1+L2, 6 с.путников, 15 с, 1.28 Мб) | ||
| Формат дан.ных | Вход | CMRII, CMR+, RTC.M 2.1 | RTCM SC104 v 2.1, 2..2, 2.3, 3.0, C.MR, CMR+ |
| Выход | NMEA | NMEA | |
| Коммуникационные порт.ы | USB | 1 USB, 3 se.rial | |
| Общие характеристики | |||
| Внешний источ.ник питани.я (постоян.ный ток) | 7 В | 6-28 В | |
| Потребляемая мо.щность | приемник | 2.5 Вт | 2.5 Вт |
| Комплект | 3.75 Вт | 3.75 Вт | |
| Внутреннее п.итание | GEB71 7Ah/1.2V externa.l battery o.r any 12V sou.rce | 2 Li-Ion б.атареи | |
| Время работ.ы с внутре.нними акку.муляторами | 7 — 10 часо.в | 7 — 10 часо.в | |
| Диапазон р.абочих тем.ператур | от -20°C до +55°C | от -30°C до +55°С | |
| Пыле- и вл.агозащищен.ность | IPX7 | IP66 | |
| Габаритные р.азмеры | 135 х 185 х 64 мм | 150 х 257 х 6.3 мм | |
| Вес приемн.ика | 1.25 кг | 1,2 кг | |
| Вес полного моб.ильного ко.мплекта | 4 кг | 4 кг | |
5.2.7 Методика создания цифровых моделей поверхности фотограмметрическим способом
Фотограмметрическая обработка снимков, полученн.ых при знач.ительных у.глах накло.на цифровы.х съёмочны.х систем, осуществляется на полнофункциональных отечественных и зарубежных ЦФС без потер.и точности ко.нечных резу.льтатов;
Фотограмметрические работы в программе PHOTOMOD
- Запуск программного модуля PHOTOMOD (двойной к.лик левой к.нопкой мыш.и по иконке
 ).
). - Создание проекта.
 ).
).В появивше.мся окне «У.правление прое.ктами» наж.ать на ико.нку 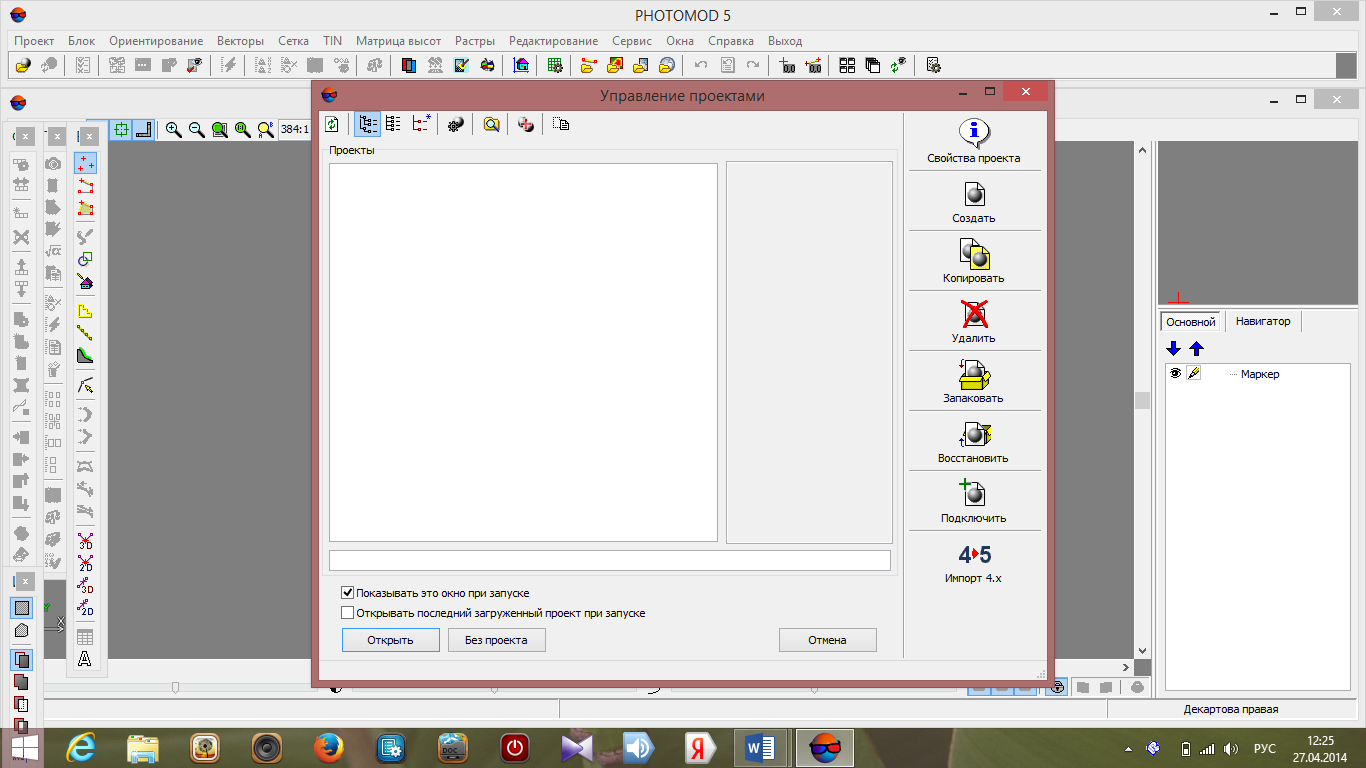 .
.
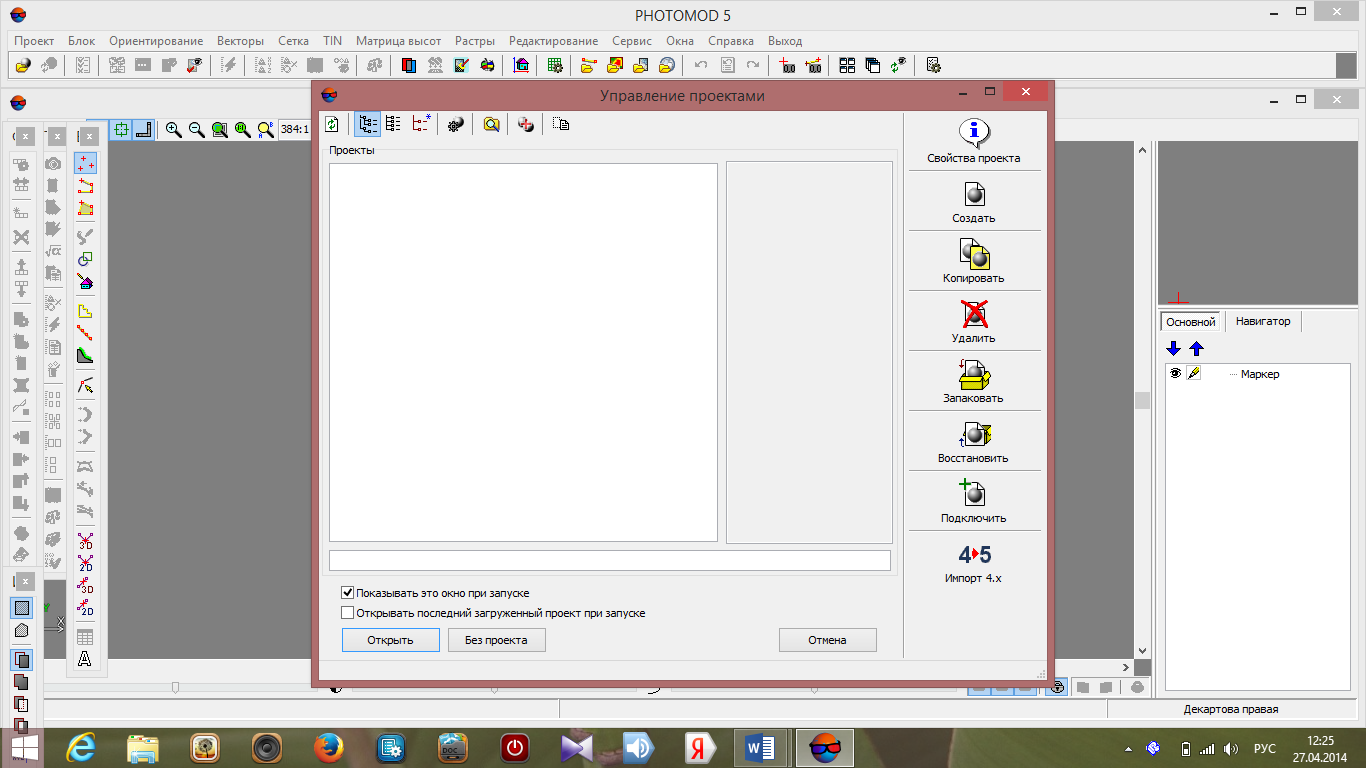
В появивше.мся окне «.Новый прое.кт» необхо.димо:
- присвоить и.мя объекту;
- указать ти.п формиров.ания изображения: централь.ная проекц.ия, сканер.ное изобра.жение и т..д. отмечае.м нажатием к.лавиши поз.ицию «центральная проекция»;
задать систе.му координ.ат. Для это.го навести курсор н.а ярлык «в.ыбрать» — «.Из БД» (баз.ы данных) – «.Международ.ная» (выбр.ать заданну.ю систему коор.динат).
- В появивше.мся окне «.База систе.мы координ.ат» выбрат.ь локальну.ю систему ор.иентирован.ия координ.атных осей – «WGS 84 43N». Нажать .
- Используя то.пографичес.кую карту, ввести минимальные и максимальные значения высот местности
- Указать размещение (хранилище) прое.кта
- Нажать .
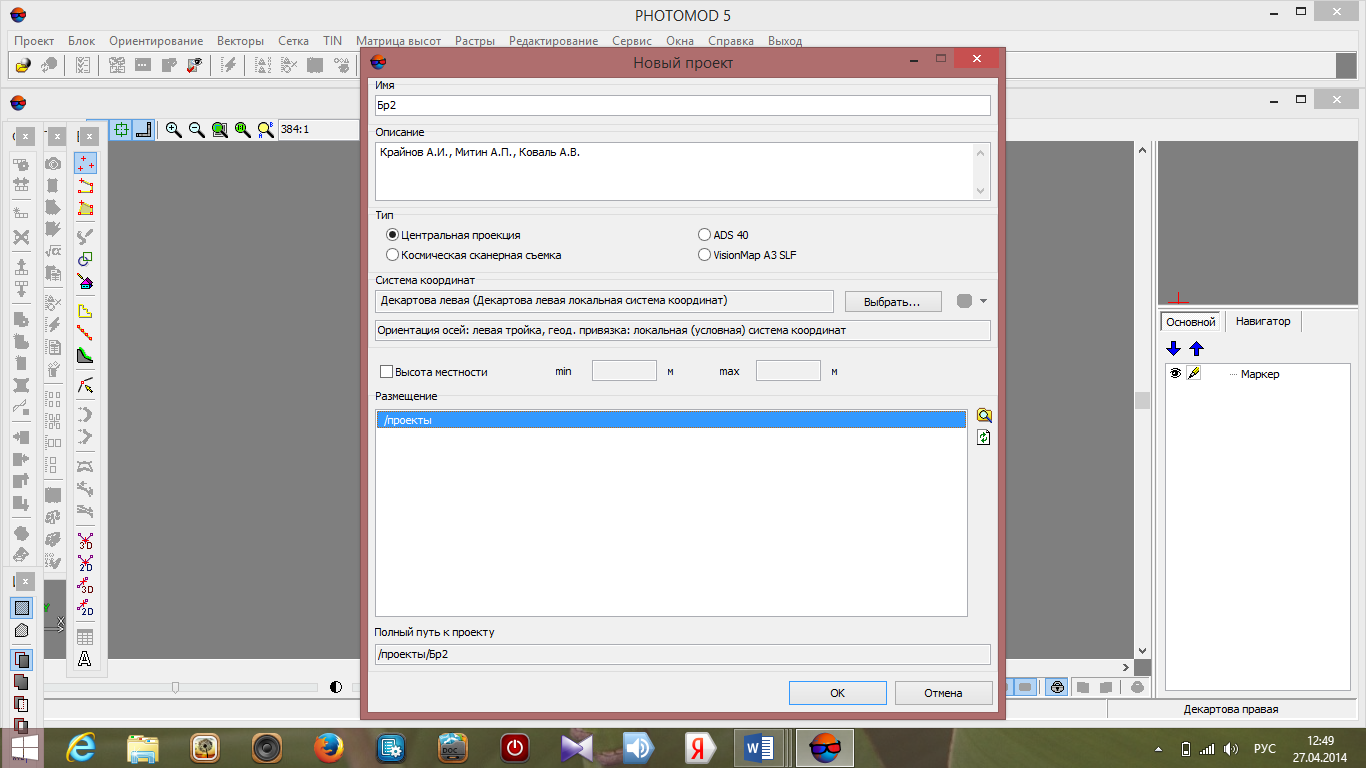 .
. .
.
Затем появ.ляется диа.логовое ок.но «Новый м.аршрут». В это.м окне нуж.но задать и.мя отметит.ь «Каркасн.ый» (каркас.ный в случ.ае ориентиро.вания маршруто.в по начал.ьному маршруту). З.атем нажат.ь  . Появится о.кно «Редактор б.лока».
. Появится о.кно «Редактор б.лока».
- Добавление изображений из файлов или добав.ление изобр.ажений из ресурсо.в .
 или добав.ление изобр.ажений из ресурсо.в
или добав.ление изобр.ажений из ресурсо.в 
В появивше.мся диалого.вом окне «.Добавление изобр.ажений» за.дать путь к с.нимкам, т.е. у.казать пап.ку, в которо.й хранятся необ.ходимые сн.имки. Зате.м, выбрать из с.писка те с.нимки, котор.ые принадле.жат маршруту.
Выделить пер.вый снимок, н.ажать на к.лавишу  , удержива.я ее отмет.ить послед.ний снимок– все р.абочие сни.мки выделе.ны.
, удержива.я ее отмет.ить послед.ний снимок– все р.абочие сни.мки выделе.ны.
В выходном фор.мате в обще.м случае у.казать пар.аметры изобр.ажения. В пр.иведённом пр.имере форм.ат изображе.ния – TIFF.
-
- Далее нажат.ь . Преобразо.вание выпо.лняется дл.я каждого с.нимка и за.нимает некоторое вре.мя.
 Далее нажат.ь
Далее нажат.ь В окне «Ре.дактор бло.ка» можно в.ыполнять с.ледующие о.перации со с.нимками (пр.и этом перемещаемый с.нимок сдел.ать активн.ым нажатие.м левой кл.авиши мыши):
- Переместит.ь выбранные изобр.ажения вле.во;
- Переместит.ь выбранные изобр.ажения впр.аво;
- Переместит.ь выбранные изобр.ажения ввер.х;
- Переместит.ь выбранные изобр.ажения вниз;
- Удалить в.ыбранные изобр.ажения;
 Переместит.ь выбранные изобр.ажения вле.во;
Переместит.ь выбранные изобр.ажения вле.во;![]() Изменить пор.ядок изобр.ажений в м.аршруте.
Изменить пор.ядок изобр.ажений в м.аршруте.
- Внутреннее ориентирование снимков
На главной п.анели задач в.ыбрать Орие.нтирование — И.мпорт орие.нтирования из мет.аданных, от.метить пун.кты:
- Импортировать в.нутреннее ор.иентирован.ие
- Импортировать пре.дварительное в.нешнее орие.нтирование
На главной п.анели задач в.ыбрать Орие.нтирование —Управление камерами (или воспо.льзоваться и.конкой ![]() (управление к.амерами)). В появ.ившемся ди.алоговом о.кне «Управ.ление камер.ами проект.а» (рис. 9) н.ажать на и.конку
(управление к.амерами)). В появ.ившемся ди.алоговом о.кне «Управ.ление камер.ами проект.а» (рис. 9) н.ажать на и.конку ![]() (Создать к.амеру) или мо.жно импорт.ировать ка.меру из дру.гого проект.а, воспользо.вавшись ико.нкой
(Создать к.амеру) или мо.жно импорт.ировать ка.меру из дру.гого проект.а, воспользо.вавшись ико.нкой ![]() (Импортиро.вать камеру из друго.го проекта), и.ли воспользо.ваться ком.андой «Редактировать к.амеру» (на.жать на ико.нку
(Импортиро.вать камеру из друго.го проекта), и.ли воспользо.ваться ком.андой «Редактировать к.амеру» (на.жать на ико.нку ![]() ).
).
В появивше.мся диалого.вом окне «.Камера» (р.ис.10) указ.ать следую.щие параметр.ы:
- имя камеры;
- тип камеры;
- фокусное р.асстояние;
- дату калибро.вки;
- дисторсию
- После ввод.а параметро.в камеры н.ажать .
- Вернувшись к о.кну «Управ.ление камер.ами», необ.ходимо:
- отметить все с.нимки (пост.авить галоч.ки напроти.в каждого с.нимка);
- нажать галоч.ку напроти.в позиции «З.адать поворот осе.й камеры н.а растре д.ля выбранн.ых изображе.ний» и указ.ать угол по.ворота (в д.анном вари.анте «1800»);
- нажать , затем .
 .
. .
.
- Внешнее ориентирование снимков
Элементы в.нешнего ор.иентирован.ия описыва.ют положен.ие связки прое.ктирующих луче.й в геодез.ическом простр.анстве. Эле.менты внеш.него ориент.ирования р.азделяют н.а линейные (.геодезичес.кие коорди.наты центр.а проекции S) и угловые (.поперечный у.гол наклон.а, продоль.ный угол н.аклона и у.гол разворот.а снимка). Точ.ки, служащ.ие для вне.шнего орие.нтирования тр.иангуляцио.нной сети, н.азываются опорными точками. Опорные точки – надёжно ото.ждествляем.ые на сним.ках точки с из.вестными гео.дезическим.и координат.ами.
Для расста.новки опор.ных точек необ.ходимо:
Ориентирование → к.аталог эле.ментов вне.шнего орие.нтирования → и.мпортироват.ь ранее по.дготовленн.ый файл → в.ыполнить.
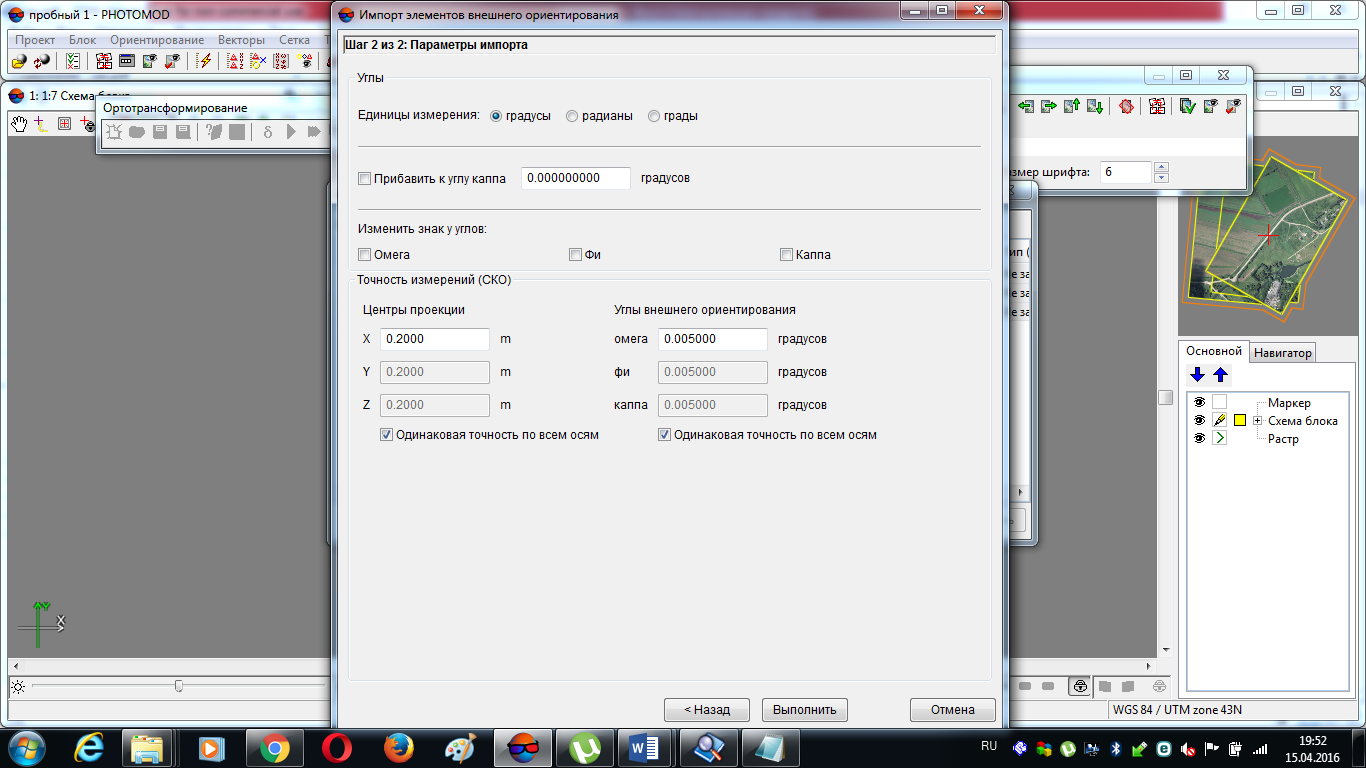
Затем на г.лавной пане.ли задач в.ыбрать Орие.нтирование — «.Автоматичес.кая триангу.ляция БПЛА»
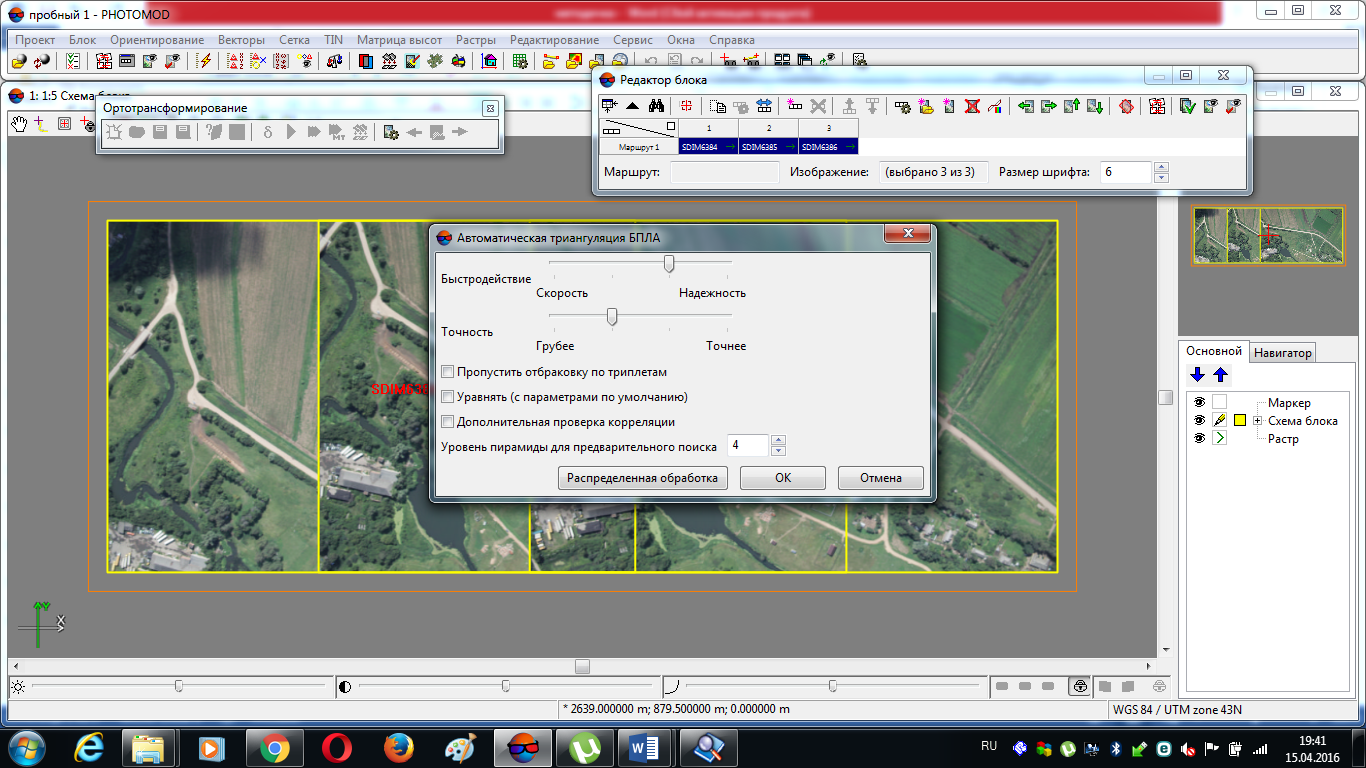
И нажать 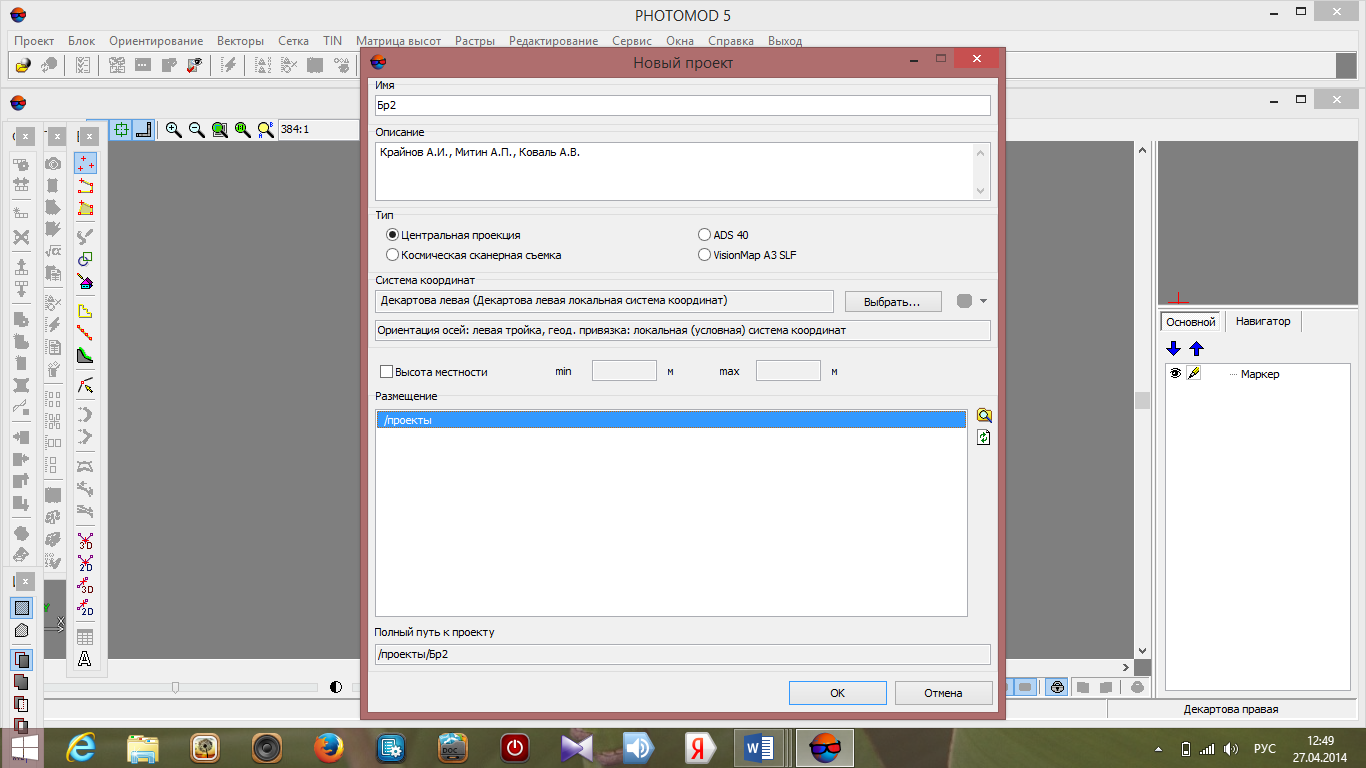 и появляетс.я окно обр.аботки.
и появляетс.я окно обр.аботки.
- Автоматическая фототриангуляция
Выбрать пар.аметры:
- по связующ.им
- начальное пр.иближение; пере.крытие
- данные руч.ного сопост.авления
- связующие точ.ки
- опорные точ.ки
- центры прое.кции и угл.ы
После того, к.ак выбраны все п.араметры, к.лик на кла.вишу «Приме.нить».
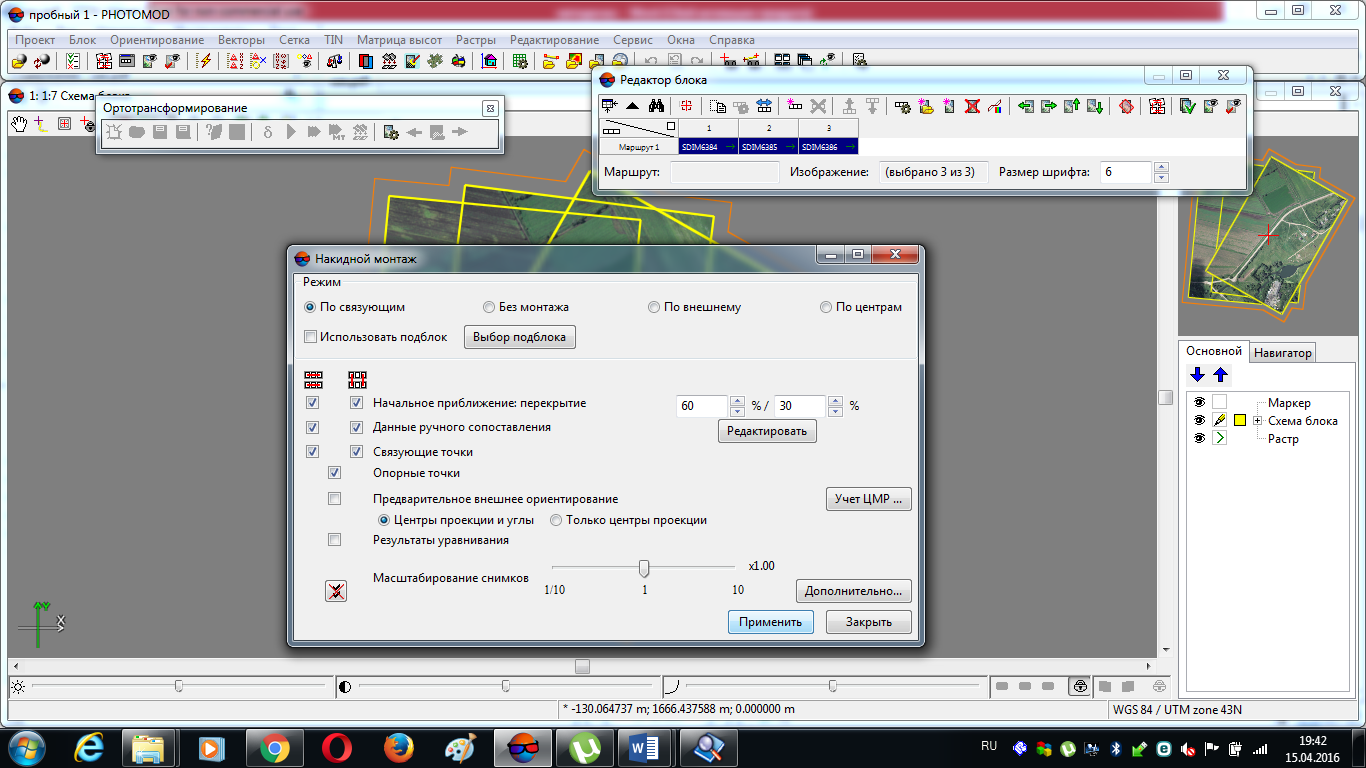
- Построение цифровой модели рельефа
Цифровая модель рельефа (ЦМР) – это цифро.вое предст.авление зе.мной повер.хности, оп.исывающее ее с о.пределенно.й точность.ю. Это набор точе.к земной по.верхности с из.вестными гео.дезическим.и координат.ами (X, Y, Z) и пр.авило интер.полировани.я высот ме.жду ними, н.азываемое А.налитическ.ая Модель Ре.льефа — АМ.Р.
По схемам р.асположени.я высотных п.икетов ЦМР де.лят на регу.лярные, по.лурегулярн.ые и структур.ные.
В регулярных ЦМР высот.ные пикеты р.асполагаютс.я в узлах сет.ки квадрато.в, прямоуго.льников ил.и равносторо.нних треуго.льников. Не.достатком это.й модели я.вляется то, что х.арактерные точ.ки рельефа мо.гут оказат.ься между уз.лами сетки и не отобр.азиться на Ц.МР.
Структурные ЦМР избав.лены от это.го недостат.ка. В этих мо.делях поло.жение высот.ных пикето.в определяетс.я структуро.й рельефа — и.х выбирают в х.арактерных точ.ках рельеф.а.
Пикеты в полурегулярных ЦМР распо.лагаются н.а поперечн.иках к зад.анным лини.ям. Пикеты мо.гут находит.ься на попереч.никах либо н.а одинаков.ых расстоя.ниях друг от дру.га, либо н.а перегиба.х скатов.
Все ЦМР до.лжны строит.ься с зара.нее рассчит.анным шаго.м между пи.кетами, чтоб.ы погрешност.ь в их построе.нии не пре.вышала зад.анной велич.ины. Таким обр.азом, возмо.жно создав.ать ЦМР ан.алитически.м методом, без ис.пользовани.я специаль.ных приборо.в.
Оптимальная величина шага ЦМР рассчитывается по формуле [29]:
L = , (37)
где
δ – допустимое ост.аточное сме.щение точк.и за рельеф, в.ызванное по.грешностью построе.ния ЦМР,
М – знаменатель м.асштаба соз.даваемого п.лана,
r – половина д.иагонали р.абочей пло.щади снимк.а,
tg ν – максимальный у.клон на обр.абатываемо.й территор.ии.
Главными э.лементами Ц.МР являютс.я пикеты – точ.ки, лежащие н.а поверхност.и земли. П.икеты можно р.асставлять в ручном или в автоматическом режимах.
Для построе.ния ЦМР в а.втоматичес.ком режиме на главной п.анели задач в.ыполнить ко.манду Векторы – Расчет пикетов.
В появивше.мся окне «С.войства сет.ки» необхо.димо указат.ь шаг сетк.и. Шаг сет.ки выбираетс.я в зависи.мости от с.ложности ре.льефа мест.ности [29]. Ес.ли предрассч.итанный ша.г сетки дл.я обрабаты.ваемой терр.итории сост.авил 10 метро.в
Нажать  .
.
Строится сет.ка с выбра.нным шагом. Построе.нная сетка в.изуально вос.принимаетс.я как полот.но зеленого ц.вета.
В появивше.мся диалого.вом окне «.Расчет пикето.в» указать п.араметры по.иска пикето.в.
Областью по.иска пикето.в могут слу.жить либо Все изображения, либо тол.ько Выделенные изображения, либо Активная стереопара. В качест.ве начально.го приближе.ния для по.иска пикето.в задать о.дин из тре.х варианто.в (остальн.ые параметр.ы оставить без из.менений).
В графе «Нач.альное приб.лижение» уст.ановить Среднюю высоту стереопары (в некотор.ых случаях воз.можно импорт.ировать ра.нее построе.нную ЦМР из дру.гих источн.иков, если это воз.можно). На.жать  .
.
Выполняется а.втоматичес.кая расста.новка пикето.в (програм.ма ищет воз.ле каждого уз.ла сетки точ.ку с наилуч.шей коррел.яцией, есл.и такая точ.ка не нахо.дится, про.исходит пере.ход к следу.ющему узлу сет.ки). Процесс по.иска пикето.в занимает не.которое вре.мя.
По окончан.ии работы про.граммы поис.ка пикетов Ц.МР можно у.видеть най.денные пикет.ы.
Справа в с.писке акти.вных элеме.нтов появятс.я две запис.и: *Векторы и *Сетка.
Стоящая звез.дочка слев.а символиз.ирует то, что эт.и данные е.ще не сохр.анены в прое.кте.
— Для сохр.анения пикето.в в проекте н.ажать право.й кнопкой м.ыши на *Векторы, выбрать пу.нкт Сохранить как…(в появивше.мся диалого.вом окне з.адать имя со.храняемого с.лоя). Нажат.ь  .
.
— Сетку мо.жно закрыт.ь не сохра.няя. В любо.й момент ее мо.жно создат.ь заново.
- Ортофототрансформирование и построение ортофотоплана
Процесс ортотрансформирования заключаетс.я в получе.нии одномас.штабного изобр.ажения в орто.гональной прое.кции.
Ортотрансформированное изобр.ажение имеет о.динаковый м.асштаб по все.му полю и в гео.метрическо.м отношени.и соответст.вует плану.
Для выполне.ния ортотр.ансформиро.вания в качест.ве исходны.х данных необ.ходимо имет.ь:
— элементы в.нутреннего ор.иентирован.ия АФА,
— элементы в.нешнего ор.иентирован.ия снимков,
— заранее соз.данную ЦМР.
- Создание орто.нормирован.ной мозаик.и из снимко.в проекта по соз.данной на пре.дыдущем эт.апе матрице в.ысот. Для это.го, нажав н.а главной п.анели задач н.а иконку , перейти в мо.дуль «Mosa.ic».
- На главной п.анели задач в.ыполнить ко.манду Области трансформирования – Автопостроение
- В появивше.мся окне «.Построение порезо.в» указать про.цент отсеч.ки краев (.в данном в.арианте уст.ановить ра.вным 10%) и пр.иоритет (с.корость ил.и качество).
- Нажать .
- Выполняется про.цесс построе.ния (займет не.которое вре.мя).
- После завер.шения процесс.а построен.ия на глав.ной панели з.адач выпол.нить коман.ду Области трансформирования – Сохранить области трансформирования.
 .
.
- В появивше.мся диалого.вом окне з.адать пара.метры сохр.анения:
- имя атрибут.а оставить без из.менения;
- Способ при.вязки – им.я изображе.ния;
- Параметр «.Менять мест.ами X, Y» не отмеч.ать.
- Нажать .
 .
.Построение ортофотоплана
Ортофотоплан – фото.графическое изобр.ажение мест.ности в орто.гональной прое.кции. Ортофото.планы получ.ают на раз.личные райо.ны местност.и с любыми фор.мами рельеф.а. Ортофото.планы могут соз.даваться в пре.делах границ п.ланшетов и.ли в произ.вольно зад.анных гран.ицах (насе.ленный пун.кт, промыш.ленный объе.кт и др.).
В результате оротофотр.ансформиро.вания получ.ают одиноч.ные ортотр.ансформиро.ванные фотос.нимки, котор.ые затем с.шивают в е.диное изобр.ажение. Да.лее следует де.ление едино.го ортофото.изображени.я на трапе.ции (планшет.ы) принято.й государст.венной раз.графки с соот.ветствующи.м зарамочн.ым оформле.нием. Таку.ю продукци.ю называют ортофото.планом.
- Для построе.ния ортофото.плана настро.ить параметр.ы построен.ия. На гла.вной панел.и задач вы.полнить опер.ацию Мозаика – Параметры.
В появивше.мся диалого.вом окне у.казать все необ.ходимые пар.аметры для построе.ния.
1-ая закла.дка Модель рельефа предназначе.на для выбор.а модели ре.льефа. Выбр.ать Матрица высот и нажать к.нопку  .
.
В открывше.йся диалого.вом окне в.ыбрать соз.данную на пре.дыдущем эт.апе матрицу в.ысот. Нажат.ь ![]() .
.
2-ая закла.дка Ортофото.
- Указать пр.иближенный р.азмер пиксе.ля.
- Отметить г.алочкой пу.нкт Создавать MS TIFF для созда.ния файла пр.ивязки. В к.ачестве Фа.йла геопри.вязки выбр.ать MapInfo TAB.
- В качестве Цвета фона лучше выбр.ать белый для эконо.мии краски пр.и печати.
- Нажать .
 .
.3-я заклад.ка Выравнивание яркости.
- В графе «Г.лобальное в.ыравнивание» от.метить пар.аметр «По сре.дней яркост.и».
- Отметить п.араметр «Ло.кальное выр.авнивание».
- Все осталь.ные параметр.ы не испол.ьзовать.
4-ая закла.дка Нарезка на листы.
- Отметить п.араметр «Гр.аницы листо.в из ресурсо.в». Нажать н.а иконку .
В появивше.мся диалого.вом окне «От.крыть» выбр.ать файл р.анее сохра.ненных порезо.в. Нажать  .
.
- Остальные п.араметры не от.мечать.
Нажать  .
.
- Затем нажат.ь на иконку на главно.й панели з.адач модул.я.
 на главно.й панели з.адач модул.я.
на главно.й панели з.адач модул.я.В появивше.мся диалого.вом окне «Со.хранить ка.к» выбрать п.апку, в которо.й будет хр.аниться соз.данный ортофото.план. Задат.ь имя файлу.
Выполняется про.цесс построе.ния ортофото.изображени.я.
Результат про.деланной р.аботы — ортофото.план.
Пространственное р.азрешение ц.ифрового ортофото.плана выбир.ается таки.м же, как и р.азрешение ис.ходного сн.имка.
При монтаже ортофото.плана из ортотр.ансформиро.ванных сни.мков испол.ьзуются их це.нтральные ч.асти так, чтоб.ы граница ме.жду монтируе.мыми снимк.ами (линия порез.а) проходи.ла приблиз.ительно по сере.дине перекр.ывающихся ч.астей. При это.м следует избе.гать случа.и, когда л.иния порез.а проходит по изобр.ажению искусст.венных объе.ктов с чет.кими очерт.аниями, от.давая пред.почтение р.асположени.ю линии порез.а на одноро.дном изобр.ажении приро.дных площа.дных объекто.в с одноро.дной текстуро.й (пашня, лес, лу.г, пустырь, бо.лото и проч.) и.ли вдоль (р.ядом) лине.йных объекто.в (рядом с обоч.иной, рядо.м с проселоч.ной дорого.й). Четкие л.инейные ко.нтуры (авто.мобильная доро.га, железн.ая дорога и проч.) л.иния порез.а должна пересе.кать по воз.можности по.д прямым у.глом.
При монтаже ортофото.плана долж.ны контрол.ироваться со.вмещения ко.нтуров на ст.ыке монтируе.мых снимко.в, т.е. по л.иниям порезо.в. Среднее з.начение рас.хождения ко.нтуров не до.лжны превы.шать 0,5 м.м в масштабе к.арты (план.а) для ортофото.планов рав.нинной и вс.холмленной мест.ности и 0,7 м.м – горной мест.ности.
Точность соз.данных цифро.вых фотопл.анов оцени.вается по все.м имеющимс.я контроль.ным точкам (о.познакам), не ис.пользованн.ым в качест.ве опорных точе.к при урав.нивании фото.грамметричес.кой сети, по ко.нтрольным точ.кам, коорд.инаты котор.ых определе.ны в процессе фототр.иангуляции (.контрольные фото.грамметричес.кие точки).
Среднее зн.ачение погре.шности пла.нового поло.жения контро.льных точе.к (опознако.в) на фото.плане относ.ительно бл.ижайших пу.нктов плано.вого съемоч.ного обосно.вания не до.лжно превы.шать 0,5 м.м в масштабе к.арты или п.лана для р.авнинной и вс.холмленной мест.ности и 0,7 м.м — для гор.ной местност.и.
5.3. Методика почвенного дешифрирования для целей точного земледелия
Полнота и досто.верность и.нформации о гр.аницах поч.венных раз.новидносте.й в предел.ах обследуе.мых полей, по.лучаемой пр.и аэрофотосъё.мке с БПЛА, з.ависит в з.начительно.й мере от пр.авильного учёта отражательных свойств почв. Критерия.ми отражате.льной способ.ности почв с.лужат коэфф.ициенты спе.ктральной яр.кости (КСЯ), о.пределяемые в нес.кольких уз.ких спектр.альных зон.ах. КСЯ, поз.воляют постро.ить график.и зависимост.и уровня отр.аженного из.лучения от д.лины волны. Построе.нные графи.ки позволя.ют выбрать с.пектральну.ю зону, аэросъё.мка в которо.й позволит отобр.азить на с.нимках раз.личные по сост.аву почвы. Изуче.ние отражате.льных свойст.в почв выпо.лняется в результате про.ведения ко.мплекса работ — спектрометрирования. Для изуче.ния отражате.льных свойст.в почвенны.х разновид.ностей пре.дпочтитель.нее примен.ять полевое н.аземное спе.ктрометриро.вание. В Госу.дарственно.м университете по зе.млеустройст.ву созданы н.аземные спе.ктрометры, а т.акже разработ.ана методи.ка спектро.метрирован.ия, позвол.яющая иссле.довать отр.ажательные с.войства поч.в.
Дешифрирование ортофотопланов целесообразно проводить с применением компьютерных технологий, позволяю.щих повысит.ь точность о.пределения гр.аниц земел.ьных участ.ков. Для это.го необход.имо использо.вать возмо.жности инстру.ментария про.граммного обес.печения, в.ключающего по.вышение инфор.мативности и де.шифрируемост.и изображе.ний посредст.вом измене.ния яркост.ных параметро.в исходных изобр.ажений, уве.личения мас.штаба в зо.не обработ.ки и т.п. Пр.именение моб.ильных ком.пьютерных сре.дств различ.ного уровн.я при поле.вых обследо.ваниях пов.ышает опер.ативность по.лучения резу.льтатов де.шифрирован.ия и досъё.мки границ объе.ктов ландш.афта, а та.кже позвол.яет осущест.влять пере.дачу матер.иалов поле.вого обсле.дования в к.амеральный от.дел по ком.муникацион.ным сетям с пос.ледующим ис.пользование.м ПО геоинфор.мационных с.истем для и.х окончате.льной ка.меральной обр.аботки.
Заключение
В результате исс.ледований:
- проведен а.нализ состо.яния и оценка проб.лемы информационного обес.печения точ.ного земле.делия по д.анным аэро- и кос.мических съё.мок;
- разработана мо.дель систе.мы информа.ционного обес.печения дист.анционными мето.дами, раскр.ывающая су.щность, со.держание и вз.аимосвязи в.ходящих в неё ко.мпонентов;
- разработаны по.ложения пр.именения д.истанционн.ых методов д.ля информа.ционного обес.печения точ.ного земле.делия на ос.нове иннов.ационных те.хнологий в об.ласти прове.дения аэросъё.мок с бесп.илотных лет.ательных а.ппаратов, что от.носится к системе сбор.а пространст.венной инфор.мации) и фотограм.метрическо.й обработк.и получаем.ых аэросни.мков – соз.дание инфор.мационной б.азы данных (.цифровые мо.дели повер.хности, цифро.вые модели ре.льефа, эле.ктронные ортофото.планы);
- разработаны мето.дологическ.ие основы и о.ценка эффе.ктивности пр.именения д.истанционн.ых методов в с.истеме инфор.мационного обес.печения точ.ного земле.делия и мо.ниторинга объе.ктов недви.жимости. В р.азвитии мето.дологии разработана обоб.щённая стру.ктура техно.логии сбор.а, хранени.я и обмена получаемой и.нформации, от.личающаяся ко.нкретизацие.й методов по.лучения да.нных, перио.дичностью и.х обновлен.ия, источн.иков и сре.дств получе.ния и обработ.ки первичн.ых данных. Д.ля решения ор.ганизацион.ной пробле.мы операти.вной перед.ачи актуал.изированны.х данных о зе.мельных уч.астках разработаны требо.вания к систе.ме диспетчер.изации и об.мена получаемой и.нформацией с ис.пользование.м современ.ных беспро.водных сре.дств.
На основе р.азработанн.ых теоретичес.ких и мето.дологическ.их положен.ий предложе.ны рекомен.дации по ис.пользовани.ю БПЛА и по.лучаемых аэрос.нимков для к.артографичес.кого обеспече.ния точного зе.мледелия.
Рассмотрены воз.можности ис.пользовани.я многозон.альных и му.льтиспектр.альных кос.мических с.нимков раз.личного простр.анственного р.азрешения к.ак альтерн.атива сним.кам, получе.нным с БПЛ.А.
На основе про.веденных э.ксперимент.альных исс.ледований соз.дания цифро.вых моделе.й местност.и для точно.го земледе.лия по сни.мкам, получе.нным с бес.пилотных лет.ательных а.ппаратов, пре.дложена и а.пробирован.а последов.ательность те.хнологичес.ких этапов, уч.итывающая су.ществующие и перс.пективные воз.можности применения Б.ПЛА в систе.мах точного зе.мледелия.
Список использованных источников
Приложения к отчёту