
Титульный лист и исполнители
РЕФЕРАТ
Отчет 102 с., 42 рис., 9 табл., 53 источника, 2 приложения.
РОБОТИЗИРОВАННАЯ ПЛАТФОРМА, МОНИТОРИНГ ПОЧВ, ЦИФРОВЫЕ ТЕХНОЛОГИИ, ТОЧНОЕ ЗЕМЛЕДЕЛИЕ, СИСТЕМА ДАТЧИКОВ
Объектом исследования является мобильная роботизированная платформа для экспресс-мониторинга состава почв.
В ходе выполнения НИР получены следующие результаты:
1) Выполнен обзор технологий мониторинга состава и показателей почв и существующих технических устройство для их реализации.
2) Проведен литературный обзор научных публикаций, касающийся возможных вариантов конструкции и способов управления роботизированной платформы для экспресс-мониторинга почвы.
3) Предложена концептуальная схема роботизированной платформы гусеничным движителем. Выполнены необходимые силовые и энергетические расчеты.
5) Разработаны конструкции рабочих органов для мониторинга свойств почвы с отбором и без отбора почвенных образцов.
6) Обоснован состав датчиков для экспресс-мониторинга почв, устанавливаемых на роботизированную платформу.
7) Изготовлен опытный образец дистанционно управляемой роботизированной платформы для экспресс-мониторинга состава почв.
ВВЕДЕНИЕ
Основными направлениями повышения эффективности сельского хозяйства являются широкое использование современных цифровых технологий и роботизированной техники [1].Одним из главных методов повышения урожайности и качества сельскохозяйственной продукции при соблюдении экологических требований признано точное земледелие. Оно представляет собой комплексную высокотехнологичную систему сельскохозяйственного менеджмента, включающую в себя технологии глобального позиционирования, географические информационные системы, технологии оценки урожайности, технологию переменного нормирования, технологии дистанционного зондирования земли и другие технологии [2]. При внедрении системы точного земледелия целесообразно применение различной роботизированной техники на всех этапах производственного процесса от мониторинга почв до уборки урожая [3].
Цель работы: разработка роботизированной платформы для экспресс-мониторинга состава почв.
Для достижения поставленной цели были выполнены следующие задачи:
— провести анализ научно-технической литературы, нормативно-технической документации, патентный поиск и обзор других материалов, относящихся к разрабатываемой теме;
— провести анализ конструкций существующих роботизированных платформ и систем специализированных датчиков;
— разработатьроботизированную платформу для экспресс-мониторинга состава почв и изготовить ее опытный образец;
— осуществить сборку и наладку аппаратного и программного обеспечения управления платформой для экспресс-мониторинга состава почв.
1 Обзор основных технологий и оборудования для мониторинга состава почв
Основными традиционными технологиями мониторинга показателей почв являются лабораторный анализ почвенных образцов, а также сбор данных полевыми датчиками. Рассмотрим коротко их сущность, применяемые технические устройства, основные ограничения и недостатки.
1.1 Мониторинг почв с помощью лабораторных анализов
Информированность о составе почв является основой создания оптимальных условий для роста культур. Агрохимический анализ почвы является одним из важнейших средств оценки сельскохозяйственного потенциала почвы. Он представляетсобойсовокупность операций, выполняемых с целью определения состава, физико-механических, физико-химических, химических, агрохимических и биологических свойств почвы.
В рамках агрохимического анализа проводят механический (гранулометрический), химический, минералогический и микробиологический анализы. Результаты анализов используют для составления почвенных карт, в том числе агрохимических картограмм.
Нас интересует мониторинг с помощью химического анализа почвы.
Химическим анализом можно выяснить общее содержание в почве С, N, Si, Al, Fe, Ca, Mg, Р, S, K, Na, Mn, Ti и др. элементов, содержание водорастворимых веществ (сульфатов, хлоридов и карбонатов кальция, магния, натрия и др.),степень обеспеченности почв питательными веществами (количество усваиваемых растениями соединений азота, фосфора, калия и др.).
В зависимости от поставленных задач проведение химического анализа отличается периодичностью и сроками. Показатели кислотности и засоленности почвы, содержание важнейших химических элементов рекомендуется измерять не реже раза в год, расширенный анализ с определением концентрации широкого перечня микроэлементов и соединений – раз в несколько лет. На основе химического анализа определяется комплекс мелиоративных мероприятий для её оздоровления, состав и нормы внесения удобрений, разработки карт дифференцированного внесения удобрений.
Недостаток в почве определённых химических элементов снижает болезнестойкость растений, ведёт к нарушениям вегетационного развития.Важнейшие для развития растений минеральные элементы почвы — калий, фосфор и азот.
Наиболее важно точно определить содержание азота. При дефиците азота уменьшается число плодов, и снижается урожайность. Негативным фактором развития растения является как его недостаток в почве, так и избыточное содержание (опасно образованием вредных веществ, нитратов, нитритов).
Фосфор входит в состав соединений, необходимых для здорового развития культур. Даже избыточное содержание фосфора в почве не вредит растениям. Входя в состав нуклеиновых кислот, фосфолипидов, белков, сахаров, витаминов, фосфор способствует развитию корневой системы, появлению всходов, дозреванию растений. У озимых культур повышает холодостойкость.
Калий улучшает ход обмена веществ, повышает устойчивость растений к заболеваниям, засухе (способствует лучшему удержанию воды растением).Недостаток калия внешне характеризуется сменой окраски листа, уменьшением его размера, ухудшением развития стебля и корневой системы, и как следствие торможением роста и дозревания урожая.
Еще одним важным показателем является засоленность и кислотность почв. Поскольку подвижность тяжёлых металлов и других загрязнителей, угнетающих развитие растений и оказывающих на них токсическое воздействие, напрямую зависит от кислотности почв, то одна из основных задач химического анализа в оценке плодородия – определение кислотности и засоленности почвы.
Почвы рН которых ниже 6,5 считаются кислыми, выше 7 – щелочными. В кислой среде растения подвержены грибковым заболеваниям, ухудшаются их поглотительные свойства. Особенно неблагоприятно воздействие кислых почв на ранних стадиях роста растений. За счёт ухудшения развития корневой системы и её способности к поглощению воды и питательных веществ – угнетается рост растения, снижается эффективность удобрений.
Для каждого региона характерен свой тип почвы, и, следовательно, свойуровень кислотности (рис.1.1). Например, в Кузбассе основную часть посевных площадей составляют тяжелые суглинки (рН от 4 до 7).

Рисунок1.1 – Уровень кислотности почв в зависимости от типа почв
Для большинства сельскохозяйственных культур желательно использование почв с нейтральной кислотностью (рН 6,5-7,0). Поэтому при избыточной кислотности применяется известкование, при защелачивании – гипсование почв.
Химический принцип известкования – нейтрализация свободной органической и минеральной кислоты, почва насыщается основаниями. В результате улучшаются полезные свойства почвы – аэрация, водопроницаемость и др., что ведёт к улучшению плодородности.
Гипсование основано на удалении из почвы избыточного натрия, который замещается кальцием. При гипсовании улучшается структурный состав почвы, её физико-химические и биологические свойства.
Классические лабораторные методы химического анализа почвы — хроматографический, титриметрический, гравиметрический, фотометрический и т.д. [4-7]. Для определения компонентов почвы также применяются инструментальные методы анализа – электрохимические, спектроскопические,атомно-адсорбционные и др. Для каждого их этих методов характерен свой набор технических устройств.
Осноными фазам химического анализа почвы являются:
— отбор пробы;
— формирование единой пробы;
— анализ пробы сертифицированной лабораторией;
— обработка и интерпретация результатов.
Оптимальный период для забора пробы предпосевной (чтобы проведению оздоровительных мелиоративных мероприятий не мешала занятость поля), либо период перед внесением удобрений (чтобы подбор комплекса удобрений учитывал результаты анализа). В таком случае растение будет расти и развиваться в благоприятной биохимической среде не испытывая негативных воздействий в важный период ранней вегетации.
Отбор пробы для анализа чаще всего производится методом конверта, после чего проба помещается в ёмкость из химически нейтрального материала и доставляется в лабораторию. Точка забора должна быть типичной для поля, на характерном участке рельефа, и располагаться более чем в 3-5 метрах от края поля.
Для отбора может использоваться специальная техника (автоматические пробоотборники осуществляют отбор с координатной привязкой к электронным картам), или производиться вручную. Для разных видов почв используются спиралевидные, поршневые буры, буры Эльдмана, цилиндрические для сохранения структуры образца и др.
Проба земли отбирается из корнеобитаемого слоя. Глубина забора зависит от вида культуры, глубины пропашки и других факторов. Для большинства полевых культур отбирается образец почвы на глубину от 20 до 60 см без учёта верхнего слоя дерна толщиной 2-3 см. Для хранения и доставки в лабораторию образцов необходимо использовать химически нейтральные материалы – пластик, полиэтилен.
В лаборатории для тестирования составляется единая проба. Она формируется путём измельчения и перемешивания точечных проб со всей площади поля, но если рельеф поля неоднороден, для каждого вида рельефа формируется своя проба.
Каждый химический элемент для разных видов почв имеет нормативные рекомендации по предельно допустимой концентрации, если данный показатель не превышен, мероприятия по очистке почвы не требуются. Выращивание некоторых культур может требовать более точных сведений о наличии тех или иных загрязнителей. В этих случаях подбираются тесты с более низким пределом обнаружения.
По результатам измерений могут составляться карты распределения питательных элементов в виде изолиний. На основании полученных рекомендаций разрабатываются карты дифференцированного внесения удобрений.
Несмотря на все достоинства и широкое распространение лабораторных методов химического анализа, можно отметить у них ряд ограничений и недостатков:
— незначительное количество взятых проб с единицы площади;
— существенные сроки выполнения анализов проб;
— большой временной интервал между измерениями;
— высокие экономические затраты на одну пробу;
— излишнее уплотнение почвы при использовании транспортных средств для взятия проб в поле.
Для сбора почвенных проб чаще всего используются пробоотборники, установленные на транспортные средства различной грузоподъемности.
Пробоотборник почвы Wintex MCL3 (Дания) является самым мощным в линейке производителя (рис. 1.2)

Рисунок 1.2 –Пробоотборник WintexMCL3
Это аппарат рассчитан на отбор проб с глубины до 1,2 м. Оснащен встроенной гидравликой и 4-функциональной управляющей панелью (подъем, фиксация мачты, зондирование грунта высокочастотным молотком, поворот зонда). Данный пробоотборник можно размещать на различных видах транспорта, в том числе, на тракторах.
Почвенный пробоотборник Multiprob 120 (Германия) может быть размещен на пикапах и используется для сбора образцов почвы на глубинах от 0 до 90 см, с разделением пробы на три горизонта (рис.1.3).

Рисунок 1.3– Пробоотборник Multiprob 120
Данный пробоотборник работает полностью автоматически. Погружение пробника пробоотборника осуществляется с помощью ударной системы. Высокая частота ударов (2000 ударов в минуту) позволяет вводить пробник в почву на заранее заданную глубину. Каждый полученный образец представляет собой комплексную пробу, состоящую из 15-20 фрагментов.
ПочвоотборникAmityConcordA2450 американской компании «AmityTechnologyLLC» отбирает пробы с глубины до 60 см (рис. 1.4).

Рисунок1.4 –ПочвоотборникAmityConcordA2450
Производительность пробоотборника составляет 100-120 проб в час. Выполняет до 20 автоматических отборов. Диаметр бура 1,9 см. Может быть установлен на любом квадроцикле
Почвенный полуавтоматический пробоотборник NietfeldN90 (Германия) осуществляет взятие проб почвы на глубине до 90 см (рис.1.5).

Рисунок 1.5– Пробоотборник Nietfeld N90
Данный пробоотборник автоматически, с помощью ударного механизма, погружается на нужную глубину, поворачивается и поднимается из почвы. Образец почвы из пробника нужно вынимать вручную.
Следует отметить, что не существует автономных транспортных средств, оснащенных серийными пробоотборниками.
Таким образом,актуальной проблемой является разработка мобильной роботизированной платформы, используемой в процессах исследования состава почв. Данная платформа может быть оснащена как пробоотборником, так и устройствами для мониторинга почв без изъятия проб.
1.2 Мониторинг почв полевыми датчиками
Одна из современных технологий мониторинга показателей почвы основана на использовании полевыхдатчиков. Данная технология предусматривает установку в почве на определенном расстоянии друг от друга полевых сенсорных узлов с несколькими датчиками в каждом. Данные от датчиков по радиоканалу передаются на базовую станцию, которая также установлена в поле. Информация от станций через вышки мобильной связи передается на сервер пользователю (рис.1.6).
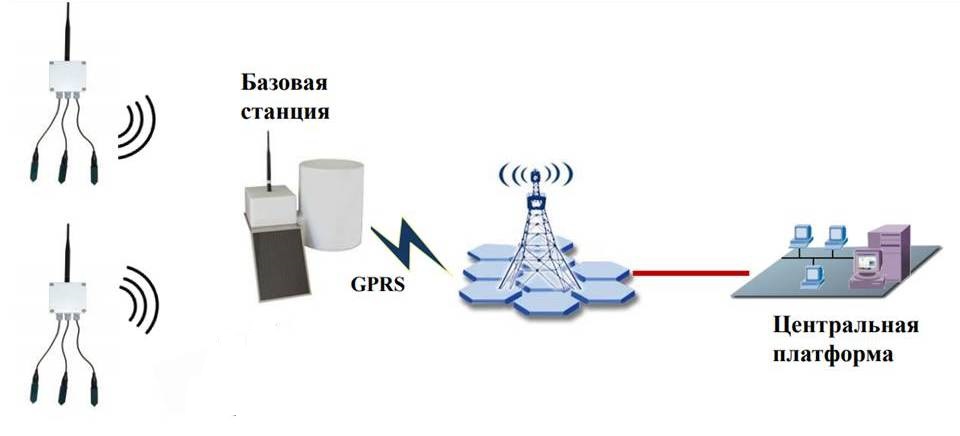
Рисунок 1.6– Передача данных мониторинга почв с использованием полевых датчиков
Основными показателями почвы, которые измеряют заглубленные полевые датчики являются влажность и температура.
Наиболее известными и широко используемыми полевыми заглубляемыми датчиками в России являются:
— датчики влажности и температуры почвы «Стриж» производства OOO «Современные радио технологии» (Сколоково) (рис.1.7);
— датчики температуры и влажности почвы Z100 производства компании CAIPOS GmbH (Австрия) (рис.1.8);
— датчики влажности почвы SM150N производства компании Delta-T DevicesLtd (Великобритания) (рис.1.9);
— датчики влажности почвы Thetaprobe производства компании Eijkelkamp (Нидерланды) (рис. 1.10).

Рисунок 1.7– Датчик влажности и температуры почвы «Стриж»

Рисунок 1.8– Датчики влажности и температуры почвы Z100

Рисунок 1.9– Датчик влажности почвы SM150N

Рисунок 1.10– Датчик влажности почвы Thetaprobe
Максимальный радиус действия базовой станции составляет около 1 км. Площадь охвата составляет 100-150 га в зависимости от профиля местности.
Максимальное количество беспроводных сенсорных узлов для одной базовой станции обычно составляет 16 единиц. Площадь охвата одним сенсорным узлом составляет 6-9 га.
Несмотря на все достоинства мониторинга почв полевыми датчиками, можно выделить у данной технологии следующие ограничения и недостатки:
— не проводится мониторинг содержания полезных химических элементов в почве и кислотности почвы;
— мониторинг датчиком осуществляется в одной стационарной точке поля;
— для проведения полевых работ необходимо убирать с поля все датчики и базовые станции;
— высокая стоимость базовых станций и комплекта датчиков к ним;
— высокие затраты на установку датчиков и базовых станций;
— необходимость регулярного контроля за состоянием датчиков и базовых станций;
— незначительное количество датчиков на единицу площади.
1.3 Экспресс-мониторинг почв приборами с зондами
Одним из наиболее экономичных и оперативных способов получения информации о составе почв является использование компактных электронных приборов, оснащенных зондами (щупами). Для их использования не требуются транспортные средства (см. п.1.1) и системы дистанционной передачи данных (см. п.1.2). Обычно исследователь вручную погружает зонды в почву и записывает показания монитора в журнал или в планшет.
Нами был проведен обзор существующих приборов для экспресс-мониторинга основных агрохимических показателей почвы (уровень кислотности, содержание азота, калия и фосфора).
Примером прибора для измерения кислотности являетсядатчик ЕТР-111 (рис. 1.11).

Рисунок 1.11 –Датчик ЕТР-111 с зондом для измерения кислотности почвы
Прибор измеряет кислотность рН в диапазоне от 2,3 до 8 с погрешностью ±0,5. Размеры зонда (длина/диаметр): 150 мм / 5 мм. Индикация в виде стрелочного дисплея.
Другим прибором для измерения кислотности является датчикZD-06 (рис.1.12).

Рисунок 1.12 – ДатчикZD-06 с зондом для измерения кислотности
Прибор измеряет кислотность рН диапазоне от 3 до 8 с погрешностью ±0,3. Размеры зонда (длина/диаметр): 300 мм / 6 мм. Индикация в виде стрелочного дисплея.
Прибором для измерения агрохимических показателей является LusterLeafRapitest 1835 (рис.1.13).

Рисунок1.13 – Датчик Luster Leaf Rapitest 1835 сзондом
Прибор помогает увидеть и оценить комплексный показатель плодородия почвы как сочетание уровней азота, фосфора и калия (NPK). Показания выводятся на цифровой дисплей.
Иономер И-510 предназначен для определения активности ионов водорода (рН), окислительно-восстановительного потенциала (Еh), концентрации (активности) ионов (рис.1.14).

Рисунок 1.14– Иономер И-510 для измерения концентрации ионов
Данный прибор определяет концентрацию ионов: фторидов F –, бромидов Br –, хлоридов Cl –, йодидов I –, нитратов NO3 –, сульфидов S2–, калия K +, натрия Na+, серебра Ag+, аммония NH4+, кальция Ca2+ и др. Результаты измерений могут быть представлены в мВ, единицах pH, мг/л или моль/л. Диапазон измерения концентрации иона в растворе от 3·10-3до 5·104 мг/л. Прибор имеет буквенно-цифровой дисплей с внутренней подсветкой. Питание иономераосуществляется от встроенных аккумуляторов.
Примером комплексного прибора для измерения агрохимических показателей являетсяLusterLeafRapitest 1880 (рис.1.15).

Рисунок 1.15 – Прибор для измерения агрохимических показателей LusterLeafRapitest 1880
Данный прибор оснащен тремя зондами и измеряет содержание азота, калия и фосфора почве, а также уровень ее кислотности. Размеры зондов (длина/диаметр):190 мм / 4 мм. Индикация в виде стрелочного дисплея.
Для реализации технологии дистанционного экспресс-мониторинга оценка и выбор конкретных моделей датчиков должен осуществляться по следующим критериям [38, 39]:
— стоимость;
— точность измерения;
— простота настройки;
— надежность работы;
— возможность записи показаний на электронный носитель;
— возможность дистанционного управления.
По соотношению указанных критериев приборыLusterLeafRapitest 1835 (1.13) и LusterLeafRapitest 1880 (рис.1.15)в дальнейшем выбраны нами как основные для проведения экспресс-мониторинга почв.
Несмотря на все достоинства экспресс-мониторинга почв компактными электронными приборами, оснащенными зондами (щупами), можно выделить у данной технологии следующие ограничения и недостатки:
— высокая трудоемкость работ, связанная с перемещением исследователя по полю и выполнением всех измерительных операций вручную;
— необходимость фиксации координат точек измерения и всех данных мониторинга вручную в журнал или в планшет;
— вероятность возникновения ошибок при сборе и фиксации данных по причине «человеческого фактора»;
— невысокая точность измерений, обусловленная погружением зонда в почву естественной структуры и влажности (необходим растворенный в воде образец измельченной почвы).
2 Анализмобильных роботизированных платформ для сельского хозяйстваи систем специализированных датчиков
2.1 Мобильные сельскохозяйственные роботы
При внедрении систем точного земледелия в сельскохозяйственном производствесуществует проблема сбора и оперативного анализа данных о показателях почвы для большого количества точек на поле. С учетом ограничений и недостатков вышерассмотренных технологий мониторинга почв для эффективного решения данной проблемы целесообразно широко использовать современные средства автоматизации, в частности, роботизированные платформы для экспресс-мониторинга почв.
Система точного земледелия предусматривает сбор данных о состоянии растительного покрова и свойствах почвы на элементарных участках поля (1-4 га) для принятия решений о дозах внесения удобрений и мелиорантов, оптимизации сроков проведения полевых работ и т.д.[8]. Кроме вышерассмотренных методов лабораторного химического анализа и мониторинга полевыми датчиками, сведения могут быть собраны другими способами: спутниковые снимки, результаты съёмокбеспилотными летательными аппаратами [9-11].
Однако и эти способы имеют определенные недостатки. Съемка из космоса зависит от погодных условий, иногда не имеет требуемой детализации изображения, данные о полях пользователь обычно получает с опозданием на несколько дней. Съемка беспилотными летательными аппаратами также зависит от погодных условий, требует регулярного получения разрешений на полет, связана с приобретением и наладкой высокоточного дорогостоящего оборудования.Оба указанных способа являются бесконтактным, поэтому не позволяют получать данные о точном количестве отдельных элементов и веществ в почве. Кроме того они используются, главным образом, при наличии растительной массы на поле, а для ранней весны и поздней осени перечень диагностируемых ими показателей почвы очень ограничен.
Собранные данные фиксируются на электронных картах и затем обрабатываются с помощью современных цифровых технологий [12, 13], информационных систем поддержки принятия решений на основе комплекса экологических, информационных и других показателей [14-17].
Исходя из вышеизложенных недостатков и ограничений рассмотренных технологий, целесообразным представляется целесообразным использовать для мониторинга свойств почвы автономную роботизированную платформу, оснащенную системой специализированных датчиков и зондов. Данная машина позволит с меньшими финансовыми и трудовыми затратами осуществлять сбор почвенных проб для последующего анализа, а также прямо в полевых условиях проводить экспресс-мониторинг состава почв. Кроме того, может быть обеспечен мониторинг почв на труднодоступных участках полей.
Нами был проведен обзор научных публикаций, касающийся возможных вариантов конструкции и способов управления роботизированной платформой для экспресс-мониторинга почвы.
Экономически эффективным вариантом для указанной платформы является разработка её конструкции в виде универсального робототехнического средства сельскохозяйственного назначения [18].
На данную платформу возможна установка различных рабочих органов, как для почвенного мониторинга, так и для традиционных операций, например, опрыскивания растений [19].
Модульный принцип разработки платформы позволяет получить специализированного сельскохозяйственного робота [20].
Использование методов кинематического моделирования позволяет сделать следующий шаг -создать пассивно-активно трансформируемого мобильного робота[21].
Принципиальным моментом при проектировании платформы является выбор типа движителя. Анализ вариантов движителя может быть осуществлен, например, на основе расширенного принципа рулевого управления Аккермана [22].
Для управления автономными сельскохозяйственными роботами предлагаются, например, система робастного цифрового управления, реализующая концепцию бортового поворота [23].
Поскольку роботизированная платформа будет использоваться в полевых условиях, то для нее необходимо проводить моделирование динамики и режимовдвижения с учётом проскальзывания колес. Одна из методик такого моделирования предлагается в работе [24].
Анализ режимов буксования движителей проводится с учётом специфики привода колес и гусениц. В работе [25] предложена методика расчёта траектории с изменяемой структурой скользящего режима для робота с дифференциальным приводом.
В случае перемещения роботизированной платформы в особо тяжелых условиях (сложный рельеф поля, горная местность, высокая влажность почвы и другое) целесообразно использовать гусеничный движитель. Модель управления траекторией движения гусеничного робота на основе алгоритма переменной структуры скользящего режима предложена в работе [26].
Современный мобильный робот оснащён цифровой системой управления движением. Нами был проведён литературный обзор возможных систем управления траекторией перемещения роботизированной платформы по полю.
В работе [27] предложена оригинальная онлайн-система 3D картографирования и локализации для сельскохозяйственных роботов, которая может быть реализована в нашей роботизированной платформе.
Протокол совместного управления маршрутизацией роботизированной платформы с онлайн-адаптацией может быть сформирован по методике, предложенной в работе [28].
Многоцелевое планирование траектории движенияроботизированной платформы с использованием гибридного алгоритма оптимизации может осуществляться, например, по технологииPSO-MFB, предложенной в работе[29].
Аппаратное обеспечение для автономной навигации роботизированной платформы может быть выполнено на основе модулей ArduinoUno и RaspberryPi, концепция которых изложена в работе [30].
Одним из главных элементов аппаратного обеспечения может являться, предложенный в работе [31] полнофункциональный контроллер отслеживания траектории для мобильных колёсных роботов.
Важным аспектом функционирования роботизированной платформы является обеспечение безопасности движения. В работе [32] рассматривается вариант программного обеспечения, основанный на систематическом картографическом протоколировании характеристик исследуемых территорий.
Для ориентации в пространстве роботизированная платформа должна быть оснащена сенсорной системой.Нами был проведен литературный обзор возможных систем ориентации платформы в пространстве.
В работе [33] предложена система сенсоров и технология обеспечения осведомленности об окружающей среде для сельскохозяйственных роботизированных транспортных средств.
Возможный к использованию на нашей роботизированной платформе алгоритм навигации на основе LiDAR для автономного сельскохозяйственного робота предложен в работе [34].
В работе [35] выполнен анализ систем визуальной одометрии для использования в полевых условиях сельского хозяйства. На основе данного анализа можно выбрать наиболее адекватную систему для нашей роботизированной платформы.
В целом, установленная система сенсоров может реализовать метод сглаживания и слежения за траекторией на основе двойного DQN для роботизированной навигации, предложенный в работе [36].
Для экспресс-мониторинга почв необходимо использовать системы специализированных датчиков и зондов, а также аппаратуру для интерпретации и записи полученных данных. Нами был проведён литературный обзор возможных вариантоввыполнения экспресс-мониторинга почв, в том числе, применимых для роботизированной платформы.
Как уже отмечалось, информация о состоянии почвы может быть собрана с помощью беспилотных летательных аппаратов. Основным методом экспересс-мониторинга является фотосъёмка. Однако серьёзные выводы о содержании азота, калия, фосфора и других элементов при отсутствии растительности на полях сделать затруднительно.Возможен вариант обора проб почвы с помощью дронов, предложенный в работе [37]. Естественно, в этом случае количество проб будет незначительно.
Преимуществом нашей роботизированной платформы является возможность сбора данных с большого количества точек на поле. Экспресс-мониторинг характеристик почвы может осуществляться, например, с помощью приземных датчиков по технологии, предложенной в работе [38]. Последующая оценка результатов экспересс-мониторинга по данной технологии основана на методе матричного потенциала.
Принятие решений о расположении точек сбора проб на конкретном поле может быть организовано на основе градиентного метода отбора проб,предложенного в работе [39].
По итогам проведённого обзора научных публикаций о различных аспектах проектирования и функционирования автономных роботизированных транспортных средств сельскохозяйственного назначения для сбора и исследования почвенных образцов, можно сделать вывод, что имеются обоснованные предпосылки для создания эффективной конструкции роботизированной платформы для экспресс-мониторинга почв.
2.2 Обзор движителей существующих сельскохозяйственных роботов
Был проведен обзор движителей существующих сельскохозяйственных роботов с целью выявления особенностей их конструкции, достоинств и недостатков, которые были учтены при конструировании нашей робоплатформы.
Сельскохозяйственный робот AdigoFieldFluxRobot (Норвегия) имеет трехколесный движитель (рис. 2.1).

Рисунок 2.1 – Сельскохозяйственный робот AdigoFieldFluxRobot (Норвегия)
Данный робот предназначен для быстрого определения скорости эмиссии N2O и CO2из почвы. Опуская алюминиевые цилиндры на почву, робот проводит анализы примерно в 25 раз быстрее, чем при использовании традиционных методов.
Сельскохозяйственный робот BoniRob, разработанный компанией Amazon (Германия) имеет четырехколесный движитель (рис. 2.2).

Рисунок 2.2 – Сельскохозяйственный робот BoniRob (Германия)
Данный робот является универсальной робототехнической платформой для земледелия. Может быть оснащен как системой датчиков для мониторинга полей, так и рабочими органами для обработки растений.
Робот-фермерRM View, разработанный в Университете Карнеги-Мэлон (США) имеет четырехколесный движитель (рис. 2.3)

Рисунок 2.3 – Робот-фермер RM View (США)
В отличие от предыдущих четырехколесных роботов у данного робота левая и правая пара колес сблокирована. Поворот осуществляется за счет вращения колес в разные стороны.
Робот FarmWise, разработанный конструкторами из Сан-Франциско (США) также имеет четырехколесный движитель (рис. 2.4).

Рисунок 2.4 – Робот FarmWise(США)
Основное отличие данного робота от предыдущих заключается в том, что поворот осуществляются передними колесами. Робот предназначен для уничтожения сорняков и мониторинга показателей посевов (температура, влажность, состояние почвы).
Сельскохозяйственный робот AGRowBot, разработанный компанией EmergingTechnology (США) имеет шестиколесный движитель (рис. 2.5).

Рисунок 2.5 – Сельскохозяйственный робот AGRowBot (США)
Данный робот имеет повышенную проходимость за счет независимой подвески всех колес. Робот предназначен для мониторинга почвы, растений и точечной обработки посевов.
Сельскохозяйственный робот-инспектор, разработанный в Университете штата Иллинойс (США) имеет гусеничный движитель (рис. 2.6).

Рисунок 2.6 – Сельскохозяйственный робот-инспектор (США)
Данный робот автоматизирует трудоемкий процесс определения фенотипа сельскохозяйственных культур, передавая данные об их росте и развитии в режиме реального времени.
Сельскохозяйственный робот IbexIntroducesAgribot, разработанный британской компанией IbexAutomation также имеет гусеничный привод (рис. 2.7).

Рисунок 2.7 – Сельскохозяйственный робот IbexIntroducesAgribot (Великобритания)
Данный робот осуществляет дистанционное сканирование поверхности поля.
Отдельные технические решения, реализованные в движителях данных роботов, были использованы при проектировании нашей роботизированной платформы.
3 Концепция роботизированной платформы для экспресс-мониторинга почв
3.1 Концептуальная схема роботизированной платформы
Основными требованиями к функционированию разрабатываемой роботизированной платформы для сбора и оперативного анализа показателейпочвы являются:
— повышенная проходимость;
— способность перемещаться до заданных точек по заложенной программе;
— способность ориентироваться в пространстве с учётом профиля почвы и границ поля;
— отсутствие вредного воздействии на окружающую среду;
— непрерывность автономной работы без подзарядки аккумуляторов в течении минимум десяти часов;
— возможность сбора проб почвы на глубине до 30 см;
— возможность экспресс-оценки характеристик почвы в полевых условиях;
— минимальная длительность рабочего цикла (погружение и подъем бура,контакт зондов с образцом, интерпретация и запись данных на электронный носитель).
С учётом проведенного обзора научных публикаций и вышеизложенных основных требований нами разработана роботизированная платформа для экспресс-мониторинга почв.
Предполагается, что для повышения достоверности данных роботизированная платформа будет осуществлять мониторинг почв ранней весной до внесения удобрений. В данный период почвы имеет повышенную влажность, характеризуется существенными гребнями и бороздами. С учетом требований повышенной проходимости был выбран гусеничный движитель.Концептуальная схемароботизированной платформы представлена на рисунке 3.1.
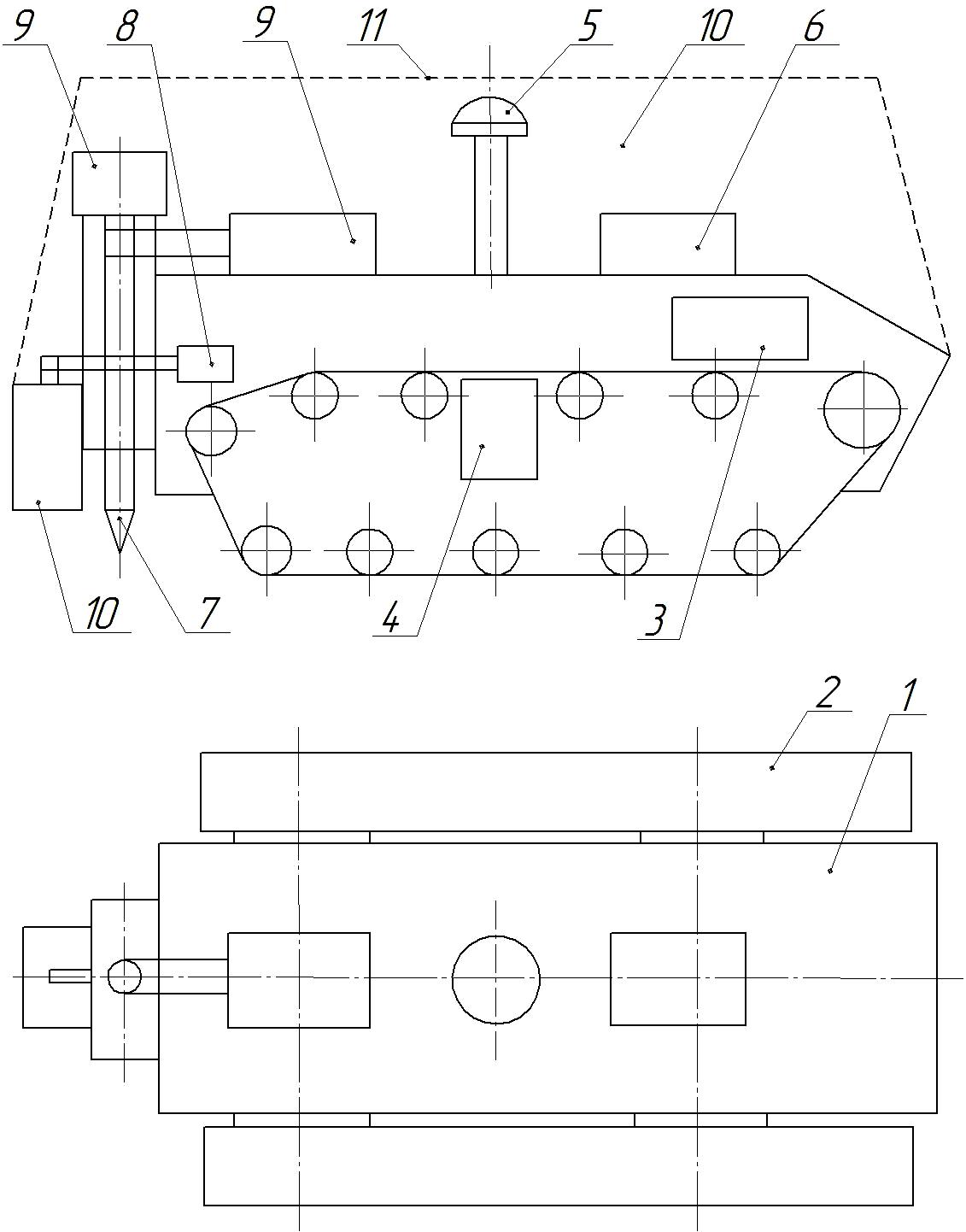
1 – рама; 2 — гусеничный движитель; 3 — двигатель гусеничного движителя; 4 — блок аккумуляторов; 5 — блок транспортных сенсоров; 6 — центральный блок управления платформой и рабочим органом; 7 — рабочий орган; 8 — блок управления датчиками; 9 — двигатели рабочего органа; 10 – емкость для почвенных проб; 11 – защитный кожух
Рисунок 3.1–Концептуальная схема роботизированной платформы для экспресс-мониторинга почв:
Роботизированная платформа имеет несущую раму 1, на которой установлены все исполнительные механизмы, диагностическое оборудование и управляющая аппаратура.
Движение по полю обеспечивается за счет двух бортовых гусеничных движителей 2, каждый из которых приводится в движение индивидуальным электродвигателем постоянного тока 3 (на виде сверху не показаны). Наличие двух независимых движителей упрощает конструкцию, обеспечивает высокую проходимость и маневренность машины. Питание электродвигателей 3 осуществляется от блока аккумуляторов 4 (на виде сверху не показаны).
Ориентация платформы в пространстве осуществляется с помощью,блока транспортных сенсоров 5, который включает несколько видеокамер,радары, лидары, GPS-модуль и другое. Фактически, данный блок выполняет функцию приема-передачи информации о местоположении платформы, скорости движения, наличия препятствий на поверхности поля и на горизонте.
Блок транспортных сенсоров 5обменивается информацией сцентральный блоком управления 6. Последний, кроме функции управления движением платформы, управляет рабочим органом 7, установленным в задней части платформы и предназначенным для формирования отверстия в почве и погружения в него зондов датчиков. Вращение бура и поворот рабочего органа обеспечивается электродвигателямипостоянного тока 9, получающими питание от блока аккумуляторов 4.Информация от датчиков обрабатывается и накапливается в блоке управления датчиками 8. Для защиты оборудования от влаги и пыли сверху устанавливается кожух 11 (на виде сверху не показан).
Дополнительное энергообеспечение платформы может осуществляться за счёт установки солнечных батарейплощадью около 1-1,5 м2мощностью 200-300 Вт (на рисунках не показаны). Следует отметить, что стоимость 1кВт*ч энергии, вырабатываемой солнечными батареями в несколько раз ниже, чем при зарядке от сети. Кроме того достигается существенный экологический эффект.
Для тяжелых условий работы возможен вариант установки бензинового электрогенератора мощностью 1,5-2 кВт (на рисунках не показан).
3.2 Конструктивные параметры роботизированной платформы
Актуальной проблемой для разрабатываемой роботизированной платформы является оценка влияния условий движения ее на конструктивные параметры и эксплуатационные режимы.
К условиям движения можно отнести:
— состояние поверхности поля (влажность, наличие растительности, размеры борозд и гребней и т.д.);
— коэффициент объемного сжатия почвы;
— максимальный угол уклона поля;
— возможность разворота за пределами поля на почве с легкими условиями движения.
Имеющиеся условия движения по полю оказывают влияние на следующие конструктивные параметры роботизированной платформы:
— общая компоновка;
— масса и положение центра тяжести;
— дорожный просвет;
— размеры колеи и базы;
— ширина гусеницы;
— длина опорной поверхности гусеницы.
Также на условия движения влияют на следующие эксплуатационные параметры:
— необходимая мощность двигателя,
— диапазон рабочих скоростей;
— радиус поворота;
— поперечная и продольная устойчивость.
Оптимальные в конкретных условиях движения конструктивные параметры разрабатываемой роботизированной платформы были рассчитаны по известным методикам, исходя из массы и положения центра тяжести самой платформы, массы и габаритов навесного оборудования (манипуляторов, зондов, датчиков и т.д.) и т.д.
Для выполнения проектных расчетов и конструирования нами предварительно были приняты следующие диапазоны размеров роботизированной платформы:
— габариты (длина 1,6-1,8 м, ширина 1,1-1,3 м, высота 1,3-1,5 м);
— расстояние между крайними опорными катками 1,1-1,3 м;
— ширина гусениц 0,16-0,25 м;
— дорожный просвет 0,15-0.22 м.
— высота центра тяжести 0,4-0,6 м.
3.3 Планирование траектории перемещения роботизированной платформы по полю
Для выполнения поставленных задач экспресс-мониторинга роботизированная платформа должна автоматически перемещаться по заданному маршруту и останавливаться в конкретной точке.
Количество точек отбора почвенных проб или точек экспресс-мониторинга, а также площадь для объединенной пробы регламентируются ГОСТ Р 58595-2019 [4]. В соответствии с данным стандартом размеры участков для одной объединенной пробы на неэродированных, слэбоэродированныхи орошаемых пахотных почвах составляют 5-20 га. В зависимости от неоднородности агрохимического состава почв каждую объединенную пробу составляют из 20-40 точечных (единичных) проб. Таким образом, для выполнения наших задач мы приняли следующие значения: одна объединенная проба на 10 га, 30 единичных проб на 1 объединенную пробу.
Предлагается следующий вариант задания координат точек мониторинга и планирования траектории перемещения.
Всё поле разбивается на прямоугольные участки размером axb, далее эти участки разбиваются на элементарные участки размером cxd с одной точкой мониторинга (рис.3.2). Величиныcи dпредлагаем выбирать в 2-3 раза больше ширины захвата разбрасывателя удобрений.
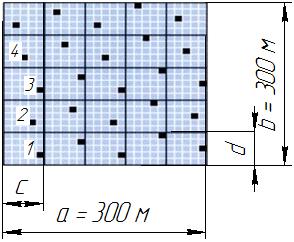
Рисунок 3.2 – Планирование расположения точек мониторинга
Робоплатформа исследует точку 1, движется от точки 1 до точки 2, исследует точку 2, движется от точки 2 до точки 3 и т.д. Расположение точек на каждом объединенном участке axb и на каждом элементарном участке cxd планируется, а затем программируется для роботизированной платформы таким образом, чтобы на одной прямой находилось не белее трех точек.
В результате мониторинга по точкам и обработки всех данных составляется подробная карта с указанием рекомендуемых для внесения доз удобрений (рис.3.3).
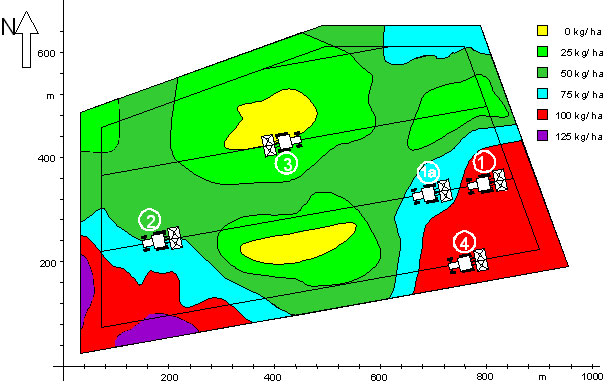
Рисунок 3.3 – Карта дифференцированного внесения удобрений
Данная карта предписаний может быть использована для управления работой машин в системе точного земледелия.
3.4 Прогноз экономической эффективности роботизированной платформы
На основании разработанной концепции функционирования, состава конструктивных узлов и принятых конструктивных параметров роботизированной платформы были выполнены предварительные экономические расчеты.
В качестве базового принятвариант исследований с использованиемквадроцикла с гидравлическим пробоотбрником как наиболее распростаненныйспрособ.
Прогнозные значения экономической эффективности применения роботизированной платформы при реализации технологии экспересс-мониторинга состава почв без отбора образцов представлены в таблице 3.1.
Таблица 3.1 –Прогноз технико-экономических показателей
| Показатель | Квадроцикл с гидравлическим пробоотборником | Роботизированная платформа с агрохимическими датчиками |
| Показатели процесса | ||
| Количество объединенных единичных проб на 10 га. | 1 | — |
| Количество единичных проб на одну объединенную пробу | 30 | — |
| Количество измерений (единичных проб) на 10 га. | 30 | 30 |
| Производительность измерений (отбора проб) с учетом перемещения по полю, мин | 2 | 2 |
| Производительность измерений (отбора проб), ед/час | 30 | 30 |
| Экономические показатели | ||
| Общая стоимость оборудования, тыс. руб. | 700 | 700 |
| Расход топлива, л/час | 6 | 2 |
| Стоимость топлива, руб/час | 270 | 90 |
| Оплата труда оператора,
руб/час |
300 | 150
1 чел. на 2 робота |
| Условия труда | Работа в поле | Комфортные |
| Затраты на лабораторный анализ проб, руб/пробу | 200 | нет |
| Сумма затрат, руб/пробу | 770 | 240 |
На основании вышеприведенной таблицы можно сделать вывод, что по большинству основных технико-экономических показателей предлагаемая роботизированная платформа (с дополнительно установленным бензиновым электрогенератором) более эффективна по сравнению с базовым вариантом.
4 Обоснование параметров движителя роботизированной платформы
Для выбора электродвигателей, решения задач конструирования привода, рамы и других узлов разработанной роботизированной платформы были решены следующие задачи:
— выполнен расчет основных геометрических характеристик движителя;
— выполнен расчет динамических показателей движителя робоплатформы;
— выполнен расчет мощности электродвигателей и аккумуляторов.
4.1 Расчет основных геометрических характеристик движителя
Для расчета основных геометрических характеристик движителя принимаем следующие условия:
— полный эксплуатационный вес машиныG = 5000 Н;
![]() — максимальная скорость движения
— максимальная скорость движения
![]() — дорожные условия через фактически допустимое среднее давление гусениц на опорную поверхность
— дорожные условия через фактически допустимое среднее давление гусениц на опорную поверхность
— габаритная ширина робоплатформыШ = 1220 мм.
 |
Результаты расчета заносим в таблицу 4.1.
Таблица 4.1–Основные геометрические характеристики движителя
| Агрофон | |||
| Целина | 0,85-0,95 | 0,06-0,08 | 3,32 |
| Стерня зерновых | 0,75-0,85 | 0,06-0,12 | 2,76 |
| Слежавшаяся пахота | 0,55-0,65 | 0,09-0,15 | 1,84 |
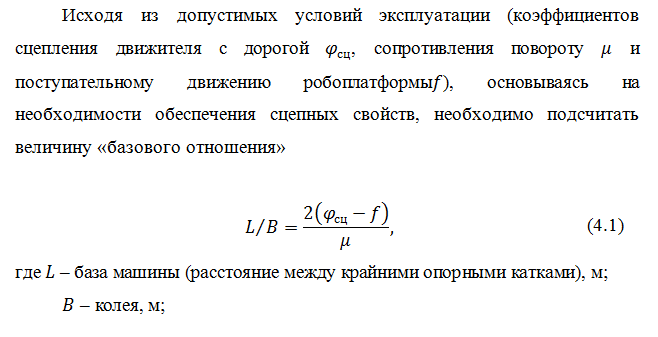
Принимая во внимание самые сложные условия движения – по обработанной почве и, с учетом рекомендаций [50] устанавливаем величину = 1,2 – по нижней границе допускаемого диапазона.
Среднее допустимое давление движителя на почву принимаем на основании рекомендаций ГОСТ 26955-86. Техника сельскохозяйственная мобильная. Нормы воздействия движителей на почву = 60 кПа [3].
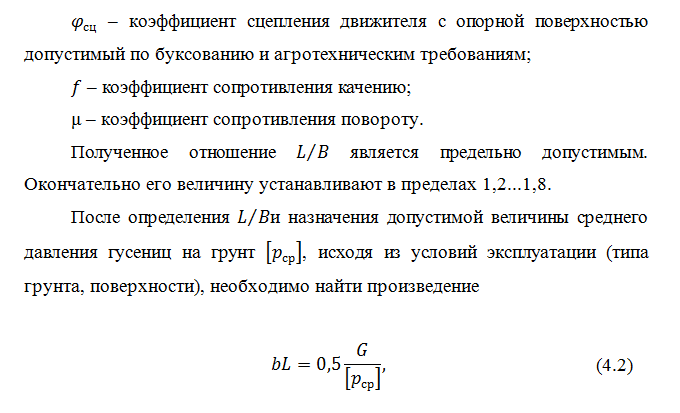
Определяем произведение по формуле (4.2)
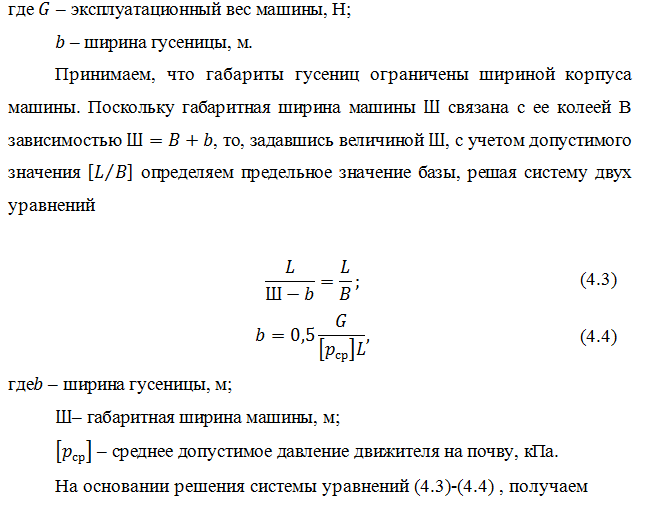
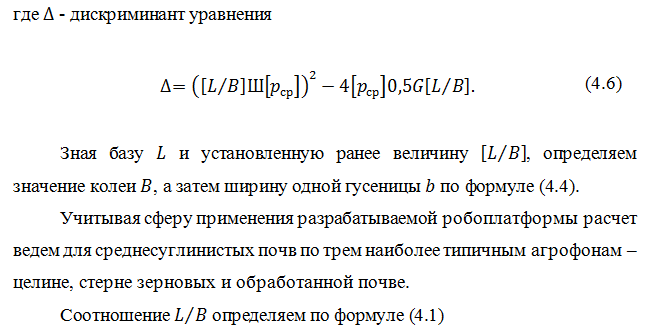
На основании решения системы уравнений (4.3)-(4.4), рассчитываембазу робоплатформы по формуле (4.5)
Исходя из заданного отношения , определяем ширину колеи робоплатформы
По формуле (4.4) определяем минимальную ширину гусеницы
Промышленностью серийно выпускаются гусеницы типа «Муравей» (рис.4.1).

Рисунок 4.1 – Гусеница типа «Муравей»
Минимальная ширина данной гусеницы составляет 220 мм. Основные характеристики гусеницы представлены в таблице 4.2.
Таблица 4.2 – Основные характеристики гусеницы типа «Муравей»
| Наименование | Значение |
| Ширина трака , мм | 220 |
| Высота грунтозацепа, мм | 20 |
| Шаг звена , мм | 50,5 |
| Сила натяжения опорной ветви гусеницы , Н | 75 |
Разработаннаяробоплатформа имеет два независимых гусеничных движителя. Схема компоновки шасси робоплатформыпредставлена на рисунке 4.2.
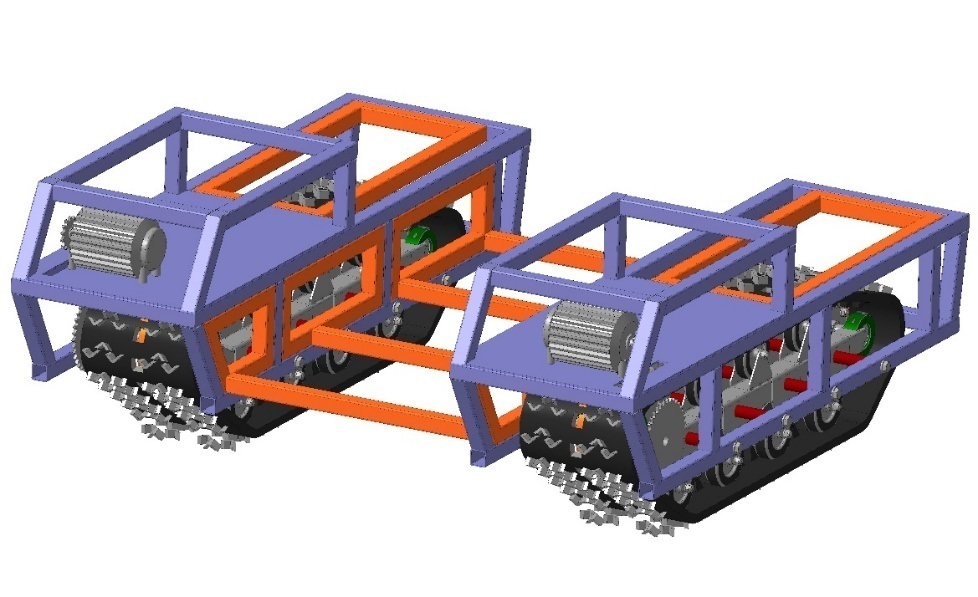
Рисунок 4.2 – Компоновка шасси робоплатформы
Для принятой компоновки на основании вышеприведенных расчетов и существующих характеристик гусениц получены следующиегеометрические характеристики движителя робоплатформы (табл.4.3)
Таблица 4.3 – Основные геометрические характеристики движителя робоплатформы
| Наименование | Значение |
| База , мм | 1220 |
| Колея , мм | 865 |
| Расстояние между опорными катками , мм | 200 |
| Количество опорных катков | 4 |
| Длина опорной поверхности гусеницы , мм | 600 |
На основе принятых геометрических характеристик движителя были разработаны сборочные чертежи шасси робоплатформы (рис.4.3-4.5)
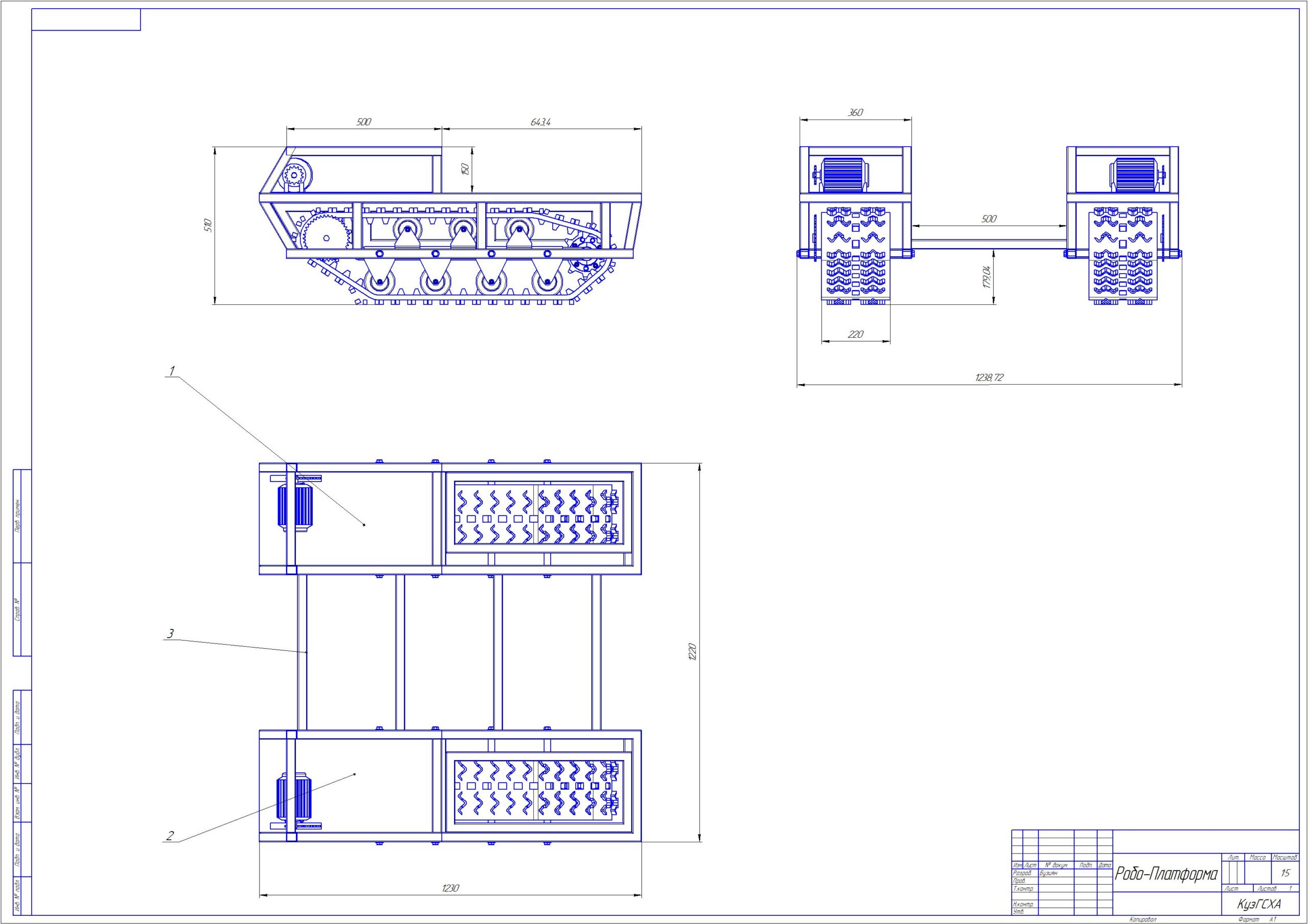
Рисунок 4.4 – Шасси робоплатформы (вид сбоку)
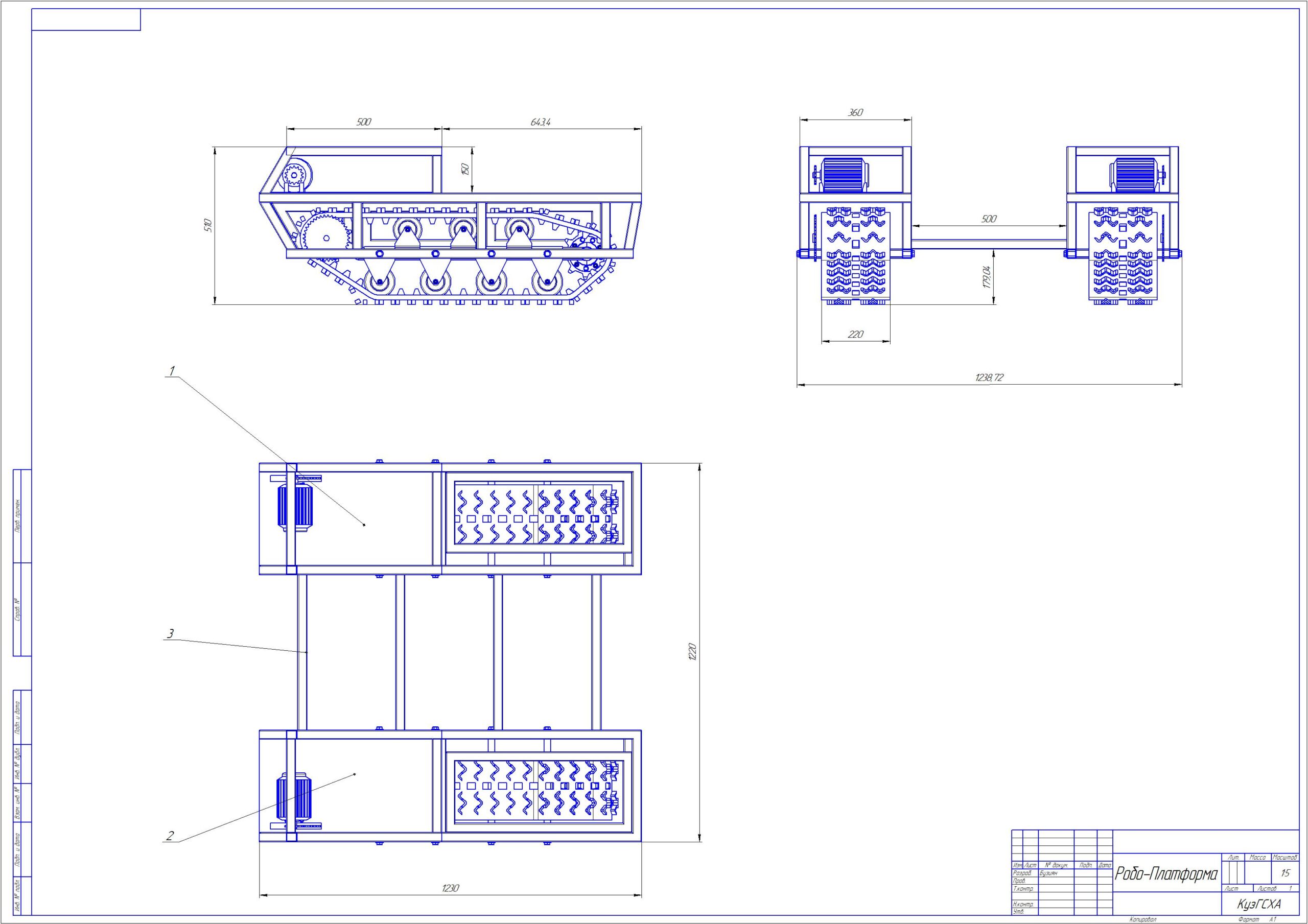
Рисунок 4.5 – Шасси робоплатформы (вид спереди)
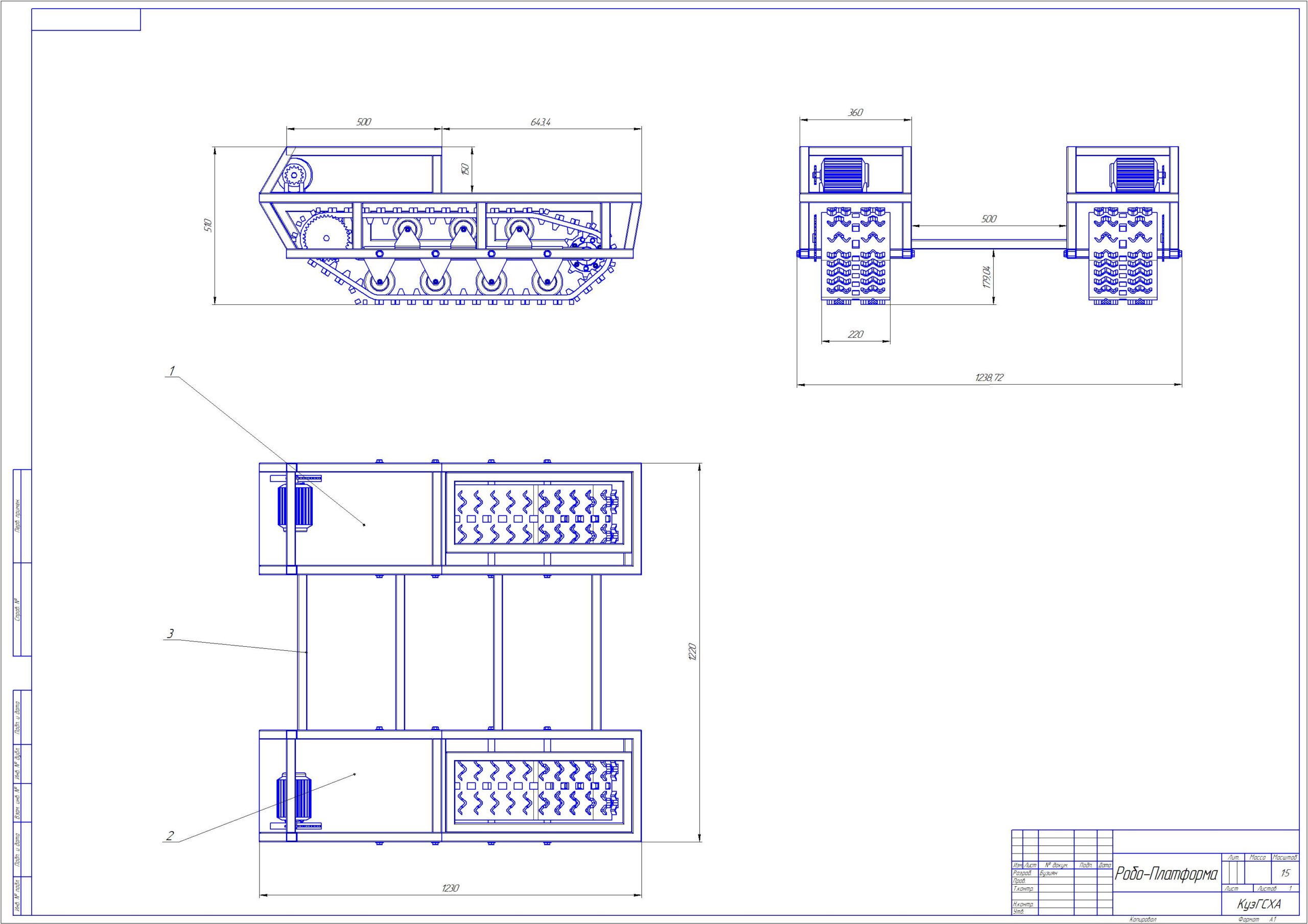
1 – правый движитель; 2- левый движитель; 3 – центральная секция
Рисунок 4.6 – Шасси робоплатформы (вид сверху)
Следует отметить, что одним из достоинств разрабатываемой робоплатформы является наличие сменной центральной секции. Это позволяет без существенных затрат изменять ширину колеи в соответствии с новыми задачами.
4.2 Расчет динамических показателей движителя робоплатформы
4.2.1 Расчет сил сопротивления движению гусеничного движителя робоплатформы
При движении гусеничного движителя робоплатформы колея образуется в результате деформации грунта лобовым участком гусеницы на глубину и деформации грунта опорной частью гусеницы вследствие неравномерного распределения давления по длине гусеницы ( и ).
Силу сопротивления движению вследствие колееобразованияопрделяем по формуле
| (4.7) |
где и – силы сопротивления движению, возникающие вследствие деформации грунта соответственно лобовым участком гусеницы и опорной ветвью движителя, Н.
При движении робоплатформыравномерно по горизонтальному участку пути сила тяжести распределяется по длине опорной ветви равномерно и центр давления совпадает с центром масс. Тогда сопротивление движению робоплатформы создается в результате прессования почвы лобовым участком гусеницы и сопротивлений, возникающих в отдельных опорных катках при прогибе гусеничной ленты.
Если все опорные катки нагружены одинаково, то лобовой участок гусеницы между направляющим колесом и передним опорным катком деформирует грунт на глубину .
Сопротивление движению определяется реакцией перед передним катком определяем по формуле
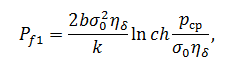 |
(4.8) |
где — ширина гусеницы, м;
— коэффициент объемного смятия почвы, Н/м3;
— предел прочности на одноосное сжатие грунта, МПа;
– КПД буксования гусеничного движителя;
– среднее давление на грунт, кПа.
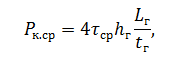
При равномерном распределении давления по длине опорной ветви гусеницы, его значение определяем по формуле
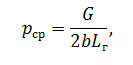 |
(4.9) | |
где – вес машины, кН;
— длина опорной поверхности гусеницы, м;
КПД буксования движителя определяем по формуле
| (4.10) |
где – буксование движителя.
Дополнительное уплотнение грунта на величину происходит ввиду неравномерного распределения давления по длине опорной ветви движителя. В этом случае, дополнительное уплотнение происходит под влиянием разности давлений между давлением под опорными катками и между ними. При этом принимаем, что деформация грунта под опорной ветвью движителя происходит нормально к ней.
Таким образом, вторая составляющая силы сопротивления движению вследствие образования колеи, зависит от распределения давления по длине опорной ветви и тяговой нагрузки определяем по формуле
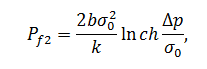 |
(4.11) |
Разница давлений , возникающая под опорной ветвью гусеницы определяем по формуле
| (4.12) |
где и – соответственно максимальное и минимальное давление на грунт опорной ветви гусеничного движителя, МПа.
Распределение давления на грунт опорной ветви гусеницы между катками определяем по следующим формулам
 |
(4.13) | |
 |
(4.14) |
где – нагрузка на n-й опорный каток, кН;
– усилие натяжения опорной ветви гусеничного движителя, Н;
– расстояние между опорными катками гусеничного движителя, м.
Нагрузка на единичный опорный каток гусеничного движителя, при условии равномерного распределения давления по длине опорной ветви гусеницы, определяем по формуле
 |
(4.15) | |
где – количество опорных катков гусеничного движителя.
Для расчета среднего давления движителя на почву по формуле (4.9) принимаем полный вес робоплатформы, ширину гусеницы , длину опорной поверхности гусеницы .
Для расчета КПД буксования движителя по формуле (4.10) величину буксования движителей принимаем на основании установленных агротехнических требований к гусеничным сельскохозяйственным тракторам = 3% [47].
Для расчета сопротивления движению по формуле (4.8), обусловленного деформацией почвы лобовым участком гусеницы, принимаем параметры почвенного основания и по данным табл.4.1[49].
Для выбранных агрофонов сопротивление движению составляет:
— целина

— стерня зерновых

— слежавшаяся пахота

Результаты расчета представлены в таблице4.4.
Таблица 4.4– Показатели взаимодействия движителя робоплатформы с основанием
| Агрофон | , МПа | , Н/м3 | Давление под опорной ветвью гусеницы, кПа | ||
| Целина | 2,74-3,1 | 0,11-0,2 | 20,3 | 19,88 | 0,42 |
| Стерня зерновых | 1,68-2,27 | 0,11-0,17 | 20,29 | 19,89 | 0,39 |
| Слежавшаяся пахота | 0,68-1,09 | 0,06-0,11 | 20,24 | 19,93 | 0,31 |
Для расчета нагрузки на единичный опорный каток гусеничного движителя по формуле (4.15) принимаем число опорных катков = 4 в соответствии с табл. 4.3
Распределение давления на грунт опорной ветви гусеницы между катками определяем по формулам (4.13) и (4.14).При этом, принимаем усилие натяжения опорной ветви гусеничного движителя = 75 Н (табл. 4.2), а также расстояние между опорными катками гусеничного движителя = 0,2 м (табл. 4.3).
Для выбранных агрофонов давление на грунт составляет:
— целина

— стерня зерновых

— слежавшаяся пахота

Результаты расчета представлерны в таблице4.4.
Разницу давлений , возникающую под опорной ветвью гусеницы определяем по формуле (4.12).
Для выбранных агрофонов разница давлений составляет:
— целина
![]()
— стерня зерновых
![]()
— слежавшаяся пахота
![]()
Результаты расчетов представлены в таблице 4.4.
Сопротивление движению, обусловленное деформацией почвы ввиду неравномерного распределения давления по длине опорной ветви движителя, определяем по формуле (4.11).
Для выбранных агрофонов сопротивление движению составляет:
— целина

— стерня зерновых
— слежавшаяся пахота
Силу сопротивления движению вследствие колееобразования определяем по формуле (4.7).
Для выбранных агрофонов сила сопротивления движению составляет:
— целина
![]()
— стерня зерновых
![]()
— слежавшаяся пахота
![]()
Результаты расчетовпредставлены в таблице4.5.
Таблица4.5 — Силы сопротивления движению гусеничного движителя робоплатформы
| Агрофон | , Н | , Н | , Н |
| Целина | 1374,2 | 2,59 | 1376,7 |
| Стерня зерновых | 1012,7 | 2,58 | 1015,3 |
| Слежавшаяся пахота | 691,2 | 2,52 | 693,8 |
Данные таблицы 4.5 использованы для дальнейших расчетов.
4.2.2 Расчет сил сцепления гусеничного движителя робоплатформы с грунтом
При движении гусеничного движителя робоплатформы на опорные ветви гусениц со стороны грунта действуют реактивные силы. Зацепы сдвигают грунт в направлении, обратном движению. Упор зацепов, в грунт, сдвиг и срез грунтовых кирпичей возможны только при полном использовании сил трения, т.е. когда имеет место скольжение гусеницы о грунт. Таким образом, сцепление опорной ветви движителя робоплатформы с грунтом происходит как за счет трения, возникающего между подошвой звена и грунтом, так и за счет сдвига и среза почвенных кирпичей, зажатых между зацепами звена.
Следовательно, при буксовании движителя робоплатформы на опорной ветви гусениц имеются два участка, отличающиеся по характеру взаимодействия движителя с грунтом: участок трения между звеньями и грунтом, сдвига и среза грунта зацепами; участок трения о грунт сколотых и зажатых между зацепами звеньев грунтовых кирпичей.
Роль и значение этих участков изменяются в зависимости от свойств грунта, параметров гусеничного обвода, распределения нагрузки вдоль гусеницы, внешних сил, приложенных к движителю и других факторов.
Усилия сдвига, возникающие в грунте при воздействии на него отдельными зацепами, в первый момент возрастают вследствие трения и сцепления между звеньями и почвой, а затем (после достижения некоторого максимума) убывают. Усилия сдвига в зависимости от деформации уменьшаются до тех пор, пока грунтовые кирпичи полностью не срежутся. Аналогично изменяются и напряжения сдвига.
Проекция равнодействующей реакции грунта на плоскость, совпадающую с поверхностью движителя — касательная сила тяги гусеницы равна сумме касательных реакций почвы, возникающих на каждом отдельном грунтозацепе при деформации грунта в направлении, обратном движению робоплатформы
 |
(4.16) |
где — усилие сдвига, кН;
— усилие среза, кН;
— число грунтозацепов, находящихся в контакте с почвой в пределах длины контакта.
Часть касательной силы тяги гусеницы необходимой для деформации сдвига грунта определяем по формуле
 |
(4.17) |
где , — коэффициент трения скольжения и приведенный коэффициент трения покоя соответственно;
— коэффициент деформации, м;
– вес машины, кН;
– буксование движителя;
— длина опорной поверхности гусеницы, м.
Приведенный коэффициент трения является функцией коэффициентов трения покоя и скольжения. Для грунтов нормальной влажности егоопределяем по эмпирической формуле
 |
(4.18) |
где — коэффициент трения покоя.
Значение коэффициента трения покоя определяем по формуле
 |
(4.19) |
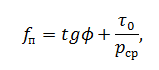
где — угол внутреннего трения грунта, град (табл. 4.1 [48]);
— молекулярные и капиллярные силы сцепления, отнесенные к площади соприкасающихся тел, МПа (табл. 1.3 [4]).
Для минеральных грунтов нормальной влажности коэффициент деформации может быть вычислен по формуле
| (4.20) |
где — расстояние (шаг звена) между почвозацепами гусеницы, м.
Сдвиг грунта сопровождается еще и его срезом. Возникающие при этом напряжения среза, появляются благодаря подрезу грунтозацепами высотой. Характер этих напряжений несколько иной, чем напряжений сдвига. Можно считать, что их значения зависят только от модуля среза и высоты грунтозацепа гусеницы. Нормальная сила и деформация не оказывают существенного влияния на их величину.
Вторую составляющую касательной силы тяги, возникающую при срезе грунтовых кирпичей грунтозацепами, определяем по формуле
 |
(4.21) |
где — напряжение (модуль) среза, Н/м;
— высота грунтозацепов гусеницы, м.
Таким образом, касательная сила тяги гусеничного движителяробоплатформы, необходимая для преодоления сил трения, сдвига и среза грунта, зависит от нагрузки , действующей на гусеницу, параметров гусеницы (шага звена и высоты грунтозацепов и ), физико-механических свойств грунта (коэффициентов трения скольжения и покоя и ) и режима движения гусеницы (коэффициента буксования ).
Для расчета коэффициента деформации по формуле (4.20) принимаем расстояние (шаг звена) между почвозацепами гусеницы = 50,5 мм (табл. 4.2).
![]()
Значение коэффициента трения покоя вычисляем по формуле (4.19).
Характеристики почвенного основания , и принимаем на основании данных табл. 4.1 [49].
Для выбранных агрофонов коэффициент трения покоя составляет:
— целина
— стерня зерновых
— слежавшаяся пахота
Приведенный коэффициент трения вычисляем по формуле (4.18).
Для выбранных агрофонов приведенныйкоэффициент трения составляет:
— целина

— стерня зерновых

— слежавшаяся пахота

Результаты расчетовпредставлены в таблице4.6.
Таблица4.6– Показатели взаимодействия движителя робоплатформыс почвой
| Агрофон | , кПа | ||||
| Целина | 2,5 | 0,77 | 0,76 | 0,902 | 0,639 |
| Стерня зерновых | 2,5 | 0,73 | 0,72 | 0,862 | 0,668 |
| Слежавшаяся пахота | 2,5 | 0,71 | 0,69 | 0,842 | 0,732 |
Часть касательной силы тяги необходимой для деформации сдвига грунта определяем по формуле (4.17). При этом,параметры гусеничной машины: полный вес и длину опорной поверхности гусеницы принимаем на основании данных табл. 4.2 и 4.3. Величину буксования движителей принимаем на основании установленных агротехнических требований к гусеничным сельскохозяйственным тракторам = 3% [46].
Для выбранных агрофонов часть касательной силы тяги составляет:
— целина

— стерня зерновых

— слежавшаяся пахота

Составляющая касательной силы тяги, возникающая при срезе грунтовых кирпичей грунтозацепами, определяем по формуле (4.21)
При этом, принимаем напряжение (модуль) среза для средних суглинков = (1,26-1,94)∙103 Н/м [48]. Высоту грунтозацепа гусеницы принимаем =0,02 м (табл. 4.2).
Суммарную касательную силу тяги гусеничного движителя робоплатформыопределяем по формуле (4.16).
Для выбранных агрофонов она составляет:
 — целина
— целина
— стерня зерновых
![]()
— слежавшаяся пахота
![]()
Результаты расчетовпредставлены в таблице4.7.
Таблица 4.7 — Силы сцепления гусеничного движителя робоплатформыс грунтом
| Агрофон | , Н | , Н | , Н |
| Целина | 2318,7 | 1,52 | 2320,2 |
| Стерня зерновых | 2231,7 | 1,52 | 2233,3 |
| Слежавшаяся пахота | 2212,3 | 1,52 | 2213,9 |
Данные таблицы 4.7 используются для дальнейших расчетов.
4.2.3 Расчет показателей проходимости робоплатформы
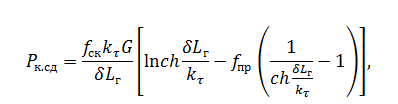
Профильная и опорно-сцепная проходимость робоплатформы характеризуются наличием свободной толкающей силы . Когда в общем тяговом балансе сила равна нулю или больше его, то машина еще может перемещаться. Если толкающая сила меньше нуля, машина теряет подвижность. Это условие выражается уравнением
| (4.22) |
где , , – соответственно касательная сила тяги, сила сопротивления движению вследствие деформации грунта и сила сопротивления движению на подъем/спуск.
Силу сопротивления движению машины на подъем/спуск определяем по формуле
| (4.23) |
где – уклон пути, град.
Принимаем случай установившегося движения робоплатформы на подъем, а также учитываем максимальную скорость движения . Силой инерции и силой сопротивления воздушной среды при расчете пренебрегаем.
Предельное значение касательной силы тяги, обусловленной свойствами опорной поверхности определяем по формуле
| (4.24) |
где – максимальный коэффициент сцепления движителя, реализуемый по условиям его взаимодействия с почвой;
– сцепной вес робоплатформы, кН. (для гусеничных машин =).
Условие сохранения робоплатформой опорно-сцепной проходимости
| (4.25) |
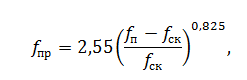
где , – коэффициенты соответственно сцепления и нагрузки движителей;
– приведенный коэффициент дорожного сопротивления.
| (4.26) |
где – коэффициент сопротивления перекатыванию.
Коэффициент, определяющий затраты на сопротивление перемещению робоплатформы, находим на основе полученных значений
| (4.27) |
Для расчета силы сопротивления движению робоплатформы на подъем/спуск по формуле (4.2) принимаем предельный угол подъема/спуска пути = 3°. Расчет ведем только для случая движения на подъем.
Для расчета толкающей силы по формуле (4.22) принимаем силу сопротивления движению вследствие деформации грунта на основе данных табл. 4.5. Соответственно касательная сила тяги принимается на основе данных табл. 4.7.
Для выбранных агрофонов толкающая силасоставляет:
— целина
— стерня зерновых
![]()
— слежавшаяся пахота
![]()
Результаты расчетовпредставлены в таблице 4.8.
Таблица 4.8 – Показатели тягово-сцепных свойств робоплатформы
| Агрофон | , Н | , Н | |||
| Целина | 237,9 | 1,0-1,2 | 5500 | 0,257 | 0,133 |
| Стерня зерновых | 512,4 | 0,8-1,0 | 4500 | 0,203 | 0,061 |
| Слежавшаяся пахота | 814,5 | 0,6-0,7 | 3250 | 0,139 | -0,004 |
Предельное значение касательной силы тяги, обусловленной свойствами опорной поверхности определяем по формуле (4.24).
Для выбранных агрофонов предельное значение касательной силы тяги составляет:
— целина
![]()
— стерня зерновых
![]()
— слежавшаяся пахота
![]()
Результаты расчетов заносим в таблицу 4.8.
Расчетный коэффициент, определяющий затраты на сопротивление перемещению машины, находим по формуле (4.27). При этом сила сопротивления движению вследствие деформации грунта принимаем на основе данных табл. 4.5.
Для выбранных агрофонов данный коэффициент составляет:
— целина
— стерня зерновых
![]()
— слежавшаяся пахота
![]()
Результаты расчета заносим в таблицу 4.8.
Приведенный коэффициент дорожного сопротивления определяем по формуле (4.26).
Для выбранных агрофонов данный коэффициент тяги составляет:
— целина
![]()
— стерня зерновых
![]()
— слежавшаяся пахота
![]()
Результаты расчетов заносим в таблицу 4.8.
Проверяем условие сохранения робоплатформой опорно-сцепной проходимости. При этом значения коэффициентов сцепления по агротехническим требованиям принимаем по данным табл. 4.1. Коэффициент нагрузки ведущих движителей для гусеничных машин составляет = 1 [46].
Для выбранных агрофонов проверяемое условие проходимости выглядит следующим образом:
— целина
![]()
— стерня зерновых
![]()
— слежавшаяся пахота
![]()
Таким образом, условие дорожной проходимости робоплатформы для всех выбранных агрофонов выполняется.
4.3 Расчет мощности электродвигателей и аккумуляторов
На основании полученных данных, для различных условий движения робоплатформы определяем основные энергетических характеристики его силовой установки – номинальной эффективной мощности двигателя и аккумуляторов.
Потребную суммарную мощность приводных электродвигателей робоплатформы определяем по формуле
| (4.28) |
где – максимальная скорость движенияробоплатформы, = 1,94 м/с;
— значение касательной силы тяги для различных типов агрофонов по данным табл. 4.7.
Для выбранных агрофонов суммарная мощность приводных электродвигателей составляет:
— целина
![]()
— стерня зерновых
![]()
— слежавшаяся пахота
![]()
Выбираем два двигателя мощностью по 2,6 кВт.
Потребную суммарная мощность аккумуляторных батарей определяем по формуле
 |
(4.29) |
где – общий КПД робоплатформы на электрической тяге
| (4.30) |
где — КПД трансмиссии, ;
— КПД приводных электродвигателей,
— КПД контроллеров,
Для выбранных двигателей потребная суммарная мощность аккумуляторных батарей составляет
На основании выполненных расчетов был сделан выбор конкретных марок электродвигателей и аккумуляторов.
На роботизированную платформу были установлены двигатели постоянного тока вышеуказанной мощности, обеспечивающие бесступенчатое регулирование частоты вращения, с самовентиляцией, с рабочим напряжением 60 В, серии МПВЕ с защитой от внешних воздействий по классу IP54.
С учетом того, что средняя потребляемаяроботизированной платформой мощность в процессе эксплуатации составляет около 30% от максимальной, былиустановлены аккумуляторы общей емкостью 300 А∙ч. Это обеспечивает непрерывную работу в течение восьмичасов. После этого осуществляется зарядка батарей, которая выполняется одновременно с другими ежесменными работами по обслуживанию роботизированной платформы.
Для достижения высоких эксплуатационных характеристик роботизированной платформы были установлены гелевые аккумуляторы. Основными их достоинствами являются: продолжительный срок эксплуатации, большое количество циклов зарядов-разрядов, отсутствие необходимости в срочной зарядке в случае глубокого разряда, небольшие потери ёмкости при простое, безопасность эксплуатации за счёт непроницаемости корпуса.
5 Рабочие органы роботизированной платформы
5.1 Рабочий орган для отбора почвенных образцов
В соответствии с модульным принципом проектирования нами разработаны два варианта рабочих органов роботизированной платформы.
Первый вариант предусматривает автоматический забор почвенной пробы с заданной глубины, подъем ее вверх на уровень установки датчиков, погружение зондов датчиковв пробу, снятие и запись показаний, высыпание пробы на поверхность поля.
Для этого же рабочего органа возможна технология, при которой со всего участка отдельные пробы почвы массой по 50-100 г собираются в одну емкость, затем объединенная проба массой 2-3 кг доставляется оператору платформы и затем направляется на стандартный анализ состава.
Установленный на роботизированную платформу рабочий орган для отбора проб почвы представлен на рисунке 5.1.
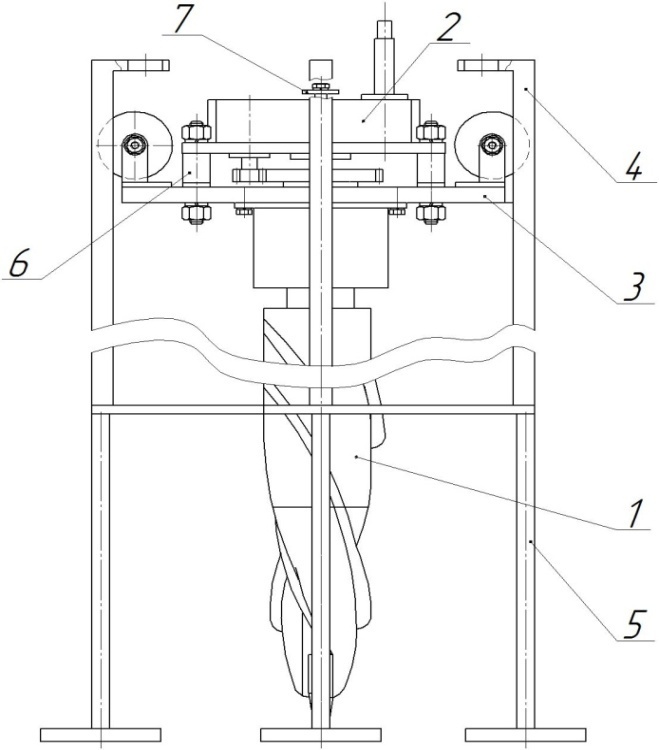
1 — заглубляемый узел; 2 — управляемый редуктор; 3 – платформа; 4 – рама; 5 – стойка; 6 – проставка; 7 – фиксатор.
Рисунок 5.1–Рабочий орган для отбора почвенных образцов
Рабочий орган (пробоотборник) состоит из рамы 4 опирающейся на стойки 5, на раме установлена платформа 3, способная свободно перемещаться в вертикальной плоскости за счет роликов и направляющих. На платформе на проставках 6 установлен управляемый редуктор 2, к нему присоединяется заглубляемый узел 1, перемещение которого в вертикальной плоскости ограничено фиксатором 7.
Для формирования в почве контрольной лункибыл разработан заглубляемый узел, который показан на рисунке 5.2.
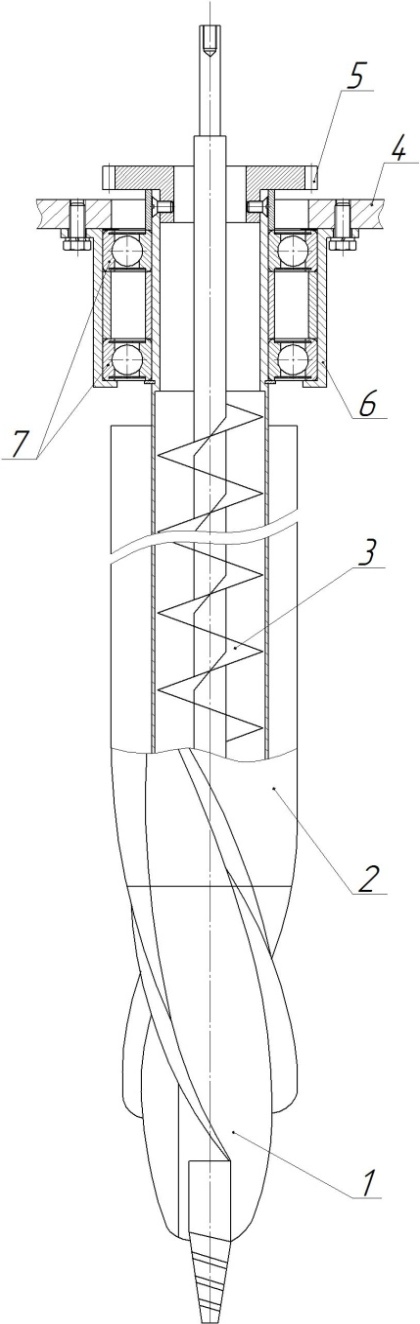
1 — головка бура; 2 — полый бура; 3 – шнек; 4 — крепежная пластина; 5 – шестерня; 6 – стакан; 7- шарикоподшипник
Рисунок 5.2–Заглубляемый узел рабочего органа
Заглубляемый узел состоит из полого бура 2 закрепленного в шарикоподшипниках 7. При помощи стакана 6 и болтов бур крепится к крепежной пластине 4 платформы. В полость бура вставляется шнек 3 с закрепленной на нем головкой бура 1, на полый бур одевается шестерня 5 и фиксируется винтами.
После того как роботизированная платформа достигла точки отбора пробы она опускает пробоотборник до тех пор пока он не встанет стойками на поверхность земли, при этом платформа 3 (рис.5.1) переместится в крайнее верхнее положение. После того как позиционирование пробоотборника завершено, управляемый редуктор переключается в режим заглубления. Крутящий момент с входного вала редуктора передается на заглубляемый узел, который начинает вращаться. За счет геометрической формы наружной поверхности заглубляемый узел начинает погружаться в почву. При этом платформа 3 опускается вслед за ним.
По достижении заданной глубины управляемый редуктор переключается в режим отбора пробы. В этом режиме крутящий момент передается только на шнек и связанную с ним головку бура. Головка бура и шнек заглубляются еще на 30 миллиметров (перемещение головки бура ограничивается фиксатором 7 (рис.5.1)) и происходит обор пробы.
По окончании процесса отбора проба управляемый редуктор переключается в режим подъема бура и в это же время роботизированная платформа носитель инициирует механизм подъема пробоотборника. В режиме подъема бура вращение заглубляемого модуля производится в противоположную от исходного направления сторону, в результате чего заглубляемый узел удаляется из почвы.
По окончании подъема пробоотборника управляемый редуктор выключается, а почвенная проба поступает в контрольную емкость. В емкости находятся зонды датчиков, которые снимают показания. После записи показаний датчиков на электронный носитель дно контрольной емкости открывается и почвенная проба высыпается на поле. Цикл мониторинга завершен, и роботизированная платформа автоматически перемещается к следующей точке согласно заданномумаршруту.
5.2 Рабочий орган для мониторинга без отбора почвенных образцов
Второй вариант рабочего органа предусматривает автоматическое бурение контрольного отверстия в почве с последующим погружением зондов датчиков N-P-K в образованное отверстие, снятие и запись показаний, подъем датчиков, перемещение роботизированной платформы к следующей точке.
Разработанный рабочий орган состоит из буровой установки, револьверной головки, поворотного устройства и фиксатора.
При изготовлении буровой установки для снижения ее стоимости часть узлов взято от серийно выпускаемых сверлильныхмашин. Выбран двигатель мощностью 1,45 Вт с частотой вращения 980 об/мин.
Для мониторинга содержания в почве азота, фосфора, калия необходимо сначала подготовить контрольное отверстие, а потом заглубить в него зонды датчика. Эта задача решается нами при помощи револьверной головки, сборочный чертеж которой представлен на рис. 5.3.
Револьверная головка состоит из основания 1, на котором установлен держатель 2 и бурильная установка 3. Блок подвеса револьверной головки состоит из подшипникового узла 4, пальца 5, стойки 6, на которые устанавливается траверса 7 с направляющей 8 и ходовым винтом 9.
Агрохимический датчик 10 зафиксирован между ходовой гайкой 11 и направляющей втулкой 12, которые обеспечивают его перемещение в вертикальной плоскости при вращении ходового винта 9, которое создается электродвигателем 13, установленным на траверсе 7 соосно с ходовым винтом 9.
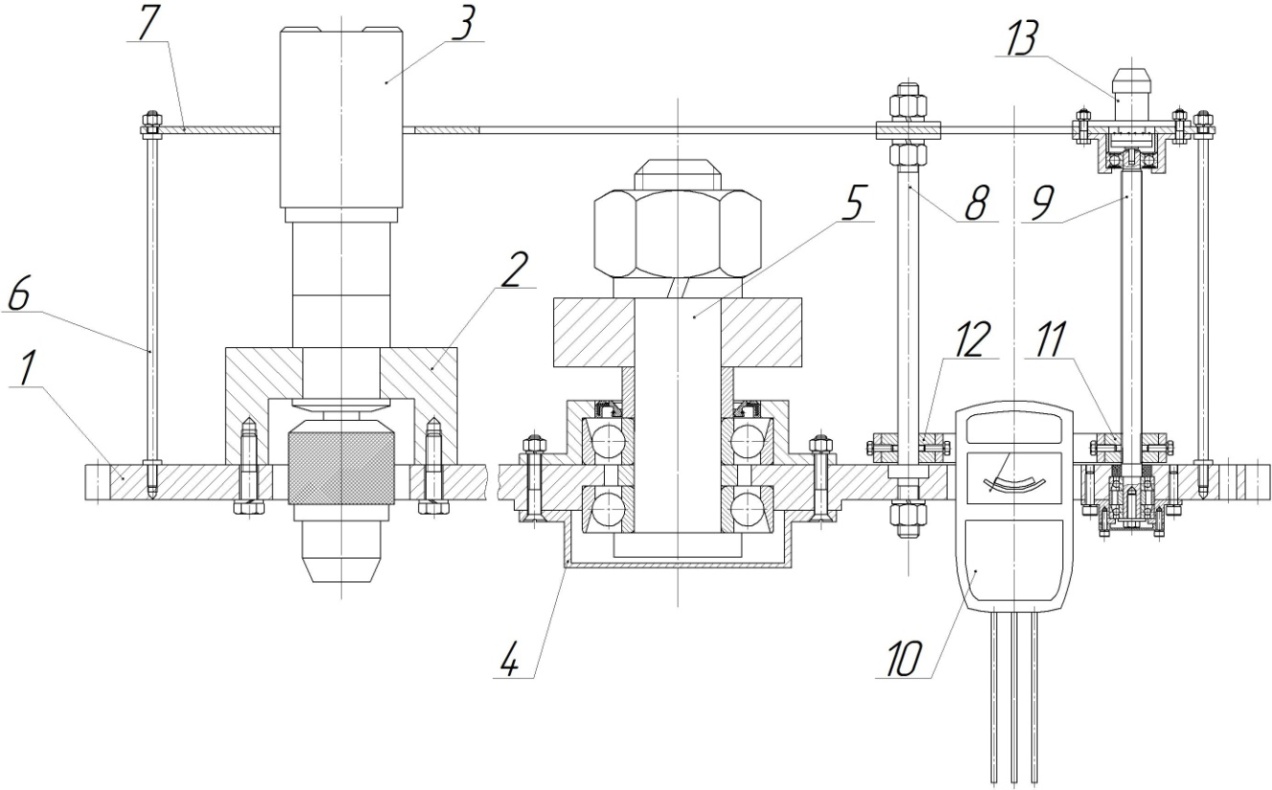
Рисунок 5.3 – Револьверная головка
Устройство работает следующим образом.
По достижении роботизированной платформой заданной на карте точки экспресс-мониторинга включается привод опускания бурильной установки 3. Как только бур достигает заданной глубины, привод бурильной установки выключается.
Затем привод бурильной установки 3 включается на реверс и происходит подъем бура. Таким образом, подготавливается контрольная лунка с рыхлой почвой, что позволяет выполнять измерения, не повредив при этом датчик 10.
Для повышения точности измерений в случае необходимости в подготовленную лунку автоматически заливается определенное количество воды (50-100 мл) из емкости, которую можно установить на роботизированную платформу (на рисунках не показана).
После подъема бурильной установки 3 осуществляется поворот револьверной головки с помощью электрического мотор-редуктора 3 с установленной на его выходном валу шестерней, которая входит в зацепление с зубчатым венцом основания 1 револьверной головки.
После поворота основания 1 на 90 градусов датчик 10 позиционируется точно над подготовленной контрольной лункой, включается электродвигатель 13 и за счет вращения с ходового винта 9 датчик 10 опускается, а его щупы погружаются в лунку и выполняют измерение содержания в почве азота, фосфора, калия, уровня кислотности и других агрохимических характеристик.
Измерение происходит в течение нескольких секунд за счет контакта смеси почвы заданной влажности, обусловленной количеством воды, залитой в лунку, с поверхностью щупов датчика. Перечень измеряемых компонентов и точность экспресс-мониторинга зависит от назначения и модели агрохимического датчика.
После того как измерения выполнены, включается реверс электродвигателя 13, датчик 10 начинает подниматься, щупы извлекаются из почвы. После полного подъема датчика 10 происходит поворот основания 1 револьверной головки на 90 градусов в исходное положение. Затем полевой робот перемещается к следующей точке экспресс-мониторинга и цикл повторяется.
Таким образом, оба варианта разработанных рабочих органов обеспечивает экспресс-мониторинг состава почв в автоматическом режиме.
6 Опытный образец роботизированной платформы
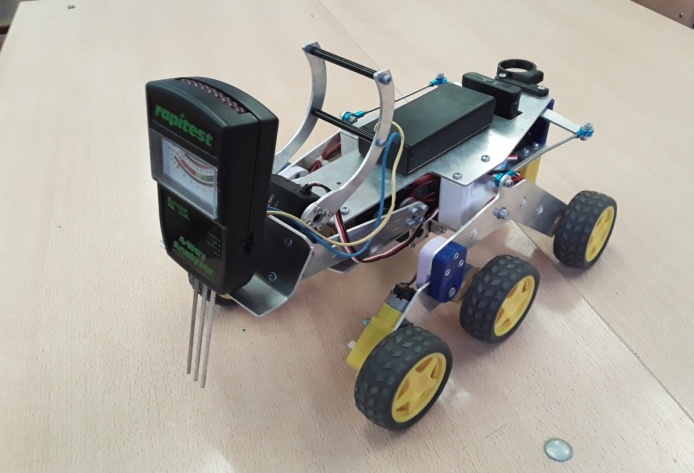
На начальном этапе работ была собрана уменьшенная копияроботизированной платформы (рис.6.1), которая позволила:
— оптимизировать алгоритмы и програмное обеспечение для перемещенияроботизированной платформы между контрольными точками по заданной траектории;
— оптимизировать алгоритмы и програмное обеспечение для управления рабочими органами;
— оптимизировать алгоритмы и програмное обеспечение для измерения и записи на внешний носитель результатов экспресс-мониторинга состава почв с привязкой к координатам контрольных точек.
 |
 |
| А | б |
а – оснащенная датчиком с тремя недистанционными зондами; б – оснащенная датчиком с одним дистанционным зондом
Рисунок 6.1 – Уменьшенная копия роботизированной платформы:
После успешных испытаний, отработки основных этапов технологии и корректировки конструкции было приобретены необходимые материалы, узлы, детали, приборы и другое оборудование. Рама, отдельные узлы гсеничных движителей, защитный кожух и ряд других узлов были изготовлены самостоятельно.
Далее была проведена сборка механической и электронной частей опытногообразца роботизированной платформы (на рис.6.2)

Рисунок 6.2 – Опытный образецроботизированной платформы (часть защитного кожуха снята)
Управление движением по полю, рабочимиорганами и датчиками роботизированной платформы осуществляется с использованием современной платы контроллера Arduino Due (рис.6.3)
Рисунок 6.3 – Общий вид платы контроллера Arduino Due
Плата контроллераArduino Due построена на базе процессора Atmel SAM3X8E ARM Cortex-M3. Это плата на основе 32-битного микроконтроллера с ARM ядром. На ней имеется 54 цифровых вход/выхода, 12 аналоговых входов, 4 UARTа (аппаратных последовательных порта),генератор тактовой частоты 84 МГц, связь по USB с поддержкой OTG, 2 ЦАП (цифро-аналоговых преобразователя), 2 TWI, разъем питания, разъем SPI, разъем JTAG, кнопка сброса и кнопка стирания.
Для управления тяговыми двигателями данная плата в составе роботизированной платформы работает вместе с контроллером типа e-bike-ctrl-sch-mega48 (рис. 6.4).

Рисунок 6.4 – Контроллер типа e-bike-ctrl-sch-mega48
Принципиальная электрическая схема данного контроллера и составленная нами для него программа управления приведена в приложениях.
Фиксация координат местоположения роботизированной платформы осуществляется с помощью установленного на ней GPS модуля NEO6MV2.
Рисунок 6.5 – GPS модуль NEO6MV2
С помощь данного мудулятакже выполняется демонстрация траектории движения роботизированной платформы в режиме реального времени через специальное приложение на экран ноутбука и смартфона.
Перемещение рабочих органов роботизированной платформы обеспечивается установленными линейными приводами (актуаторами) (рис.6.6).

Рисунок 6.6 – Линейный приводам (актуатор)
Все установленные актуаторы работают отнапряжения 12В. Максимальная длина хода актуатора зависит от назначения исполнительного узла и составляет от 150 мм для механизмов перемещения агродатчиков до 400 мм для вертикального перемещения бура при формировании контрольной лунки. Управление уктуаторами осуществляется с помощью подобранных и смонтированны нами бесконтактных исполнительных устойств на базе полевых транзисторов.
Установленные на роботизированную платформу датчики адаптированы для измерения характеристик и записи собранных данных о почве на внешнее записывающее устройство с флеш-картой памяти (рис. 6.7, 6.8)

Рисунок 6.7 – Датчик LusterLeafRapitest 1835 с внешним записывающим устройством

Рисунок 6.8 – Датчик LusterLeafRapitest 1880 с внешним записывающим устройством
Записьна электронный носитель информации о почве осуществляется с привязкой к географическим координатам контрольной лунки.
Таким образом, разработанная роботизированная платформа, оснащенная системой специализированных датчиков и зондов, обеспечивает решение поставленных перед ней задач экспресс-мониторинга состава почв.
ЗАКЛЮЧЕНИЕ
Анализ физико-химических и агрохимических показателей почвы является обязательным условием получения высоких урожаев и сохранения плодородия используемых земель. Традиционные способы оценки состава почвы, заключающиеся в отборе почвенных проб с последующими лабораторными исследованиями, а также с помощью полевых датчиков и оборудования беспилотных летательных аппаратов,характеризуются рядов существенных недостатков.
Для анализа большинства показателей возможен вариант экспресс-мониторинга, который заключается в погружении в почвенный образец зондов с датчиками. Весь комплект зондов и датчиков устанавливается на роботизированную платформу, перемещающуюся по полю по заданной программой траектории.Данный способ характеризуются высокой оперативностью и низкими экономическими затратами. За счет большого количества измерений на единице площади поля (в несколько раз больше, чем у традиционных способов) точность оценки значительно повышается. Кроме того, для одной точки поля можно проводить измерения в разных почвенных горизонтах.Кроме того, поскольку роботизированная платформа является универсальной, на нее возможна установка разработанного и предложенного в настоящем отчете пробоотборника.
По итогам выполненных работ были опубликованы: статья в издании, индексированном в WebofScience [40], 11 статей в сборниках международных научно-практических конференций [41-51], поданы две заявки на патенты [52, 53].
Разработанная роботизированная платформа для экспресс-мониторинга почв в полевых условиях, разработанная концептуальная схема и сборочные чертежи платформы, выполненные энергетические расчёты, разработанные конструкции рабочих органов, принципиальные электрические схемы (приложение А), программы управления контроллерами (приложение Б), выбранные конкретные марки датчиков и других приборов являлись базой для проектирования, изготовления и эксплуатации данного автоматизированного транспортного средства.Использование предлагаемой роботизированной платформы позволит повысить эффективность сельскохозяйственного производства.