
Титульный лист и исполнители
РЕФЕРАТ
Отчет 81 с., 56 рис., 11 табл.
«РАЗРАБОТКА АППАРАТНО-ПРОГРАММНОГО КОМПЛЕКСА
АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ДЛЯ СИСТЕМЫ
ТОЧНОГО ЗЕМЛЕДЕЛИЯ»
Целью работы является создание автопилотируемого аппарата на электротяге от аккумуляторных батарей для выполнения технологических операций в системе точного земледелия с использованием спутниковых навигационных систем.
Выходная продукция – аппаратно-программный комплекс автоматического вождения; рекомендации по производству и использованию автопилотируемого аппарата на электротяге; беспилотный электроагрегат для выполнения технологических операций в сельском хозяйстве.
В рамках НИР были проведены следующие исследования:
-научно обоснован и смоделирован алгоритм работы автономного электрошасси для систем точного земледелия с аппаратно-программным комплексом автоматического вождения;
— определены факторы повышения надежности и эффективности использования беспилотного электроагрегата;
— проведены лабораторные и полевые исследования беспилотного электроагрегата, которые в дальнейшем будут использоваться для проектирования подобных систем;
— выявлены новые зависимости и взаимосвязи в системе «автономное электрошасси».
В результате исследований были получены следующие результаты:
— осуществлен анализ существующих аппаратно-прогаммных комплексов автоматического вождения и робототехнических средств в области растениеводства;
— смоделирован математический процесс движения беспилотного электроагрегата по сигналам GPS/ГЛОНАСС навигации;
— разработан экспериментальный образец беспилотного электроагрегата с аппаратно-программным коплексом автоматического вождения;
— проведены испытания экспериментального образца беспилотного электроагрегата.
Введение
Своевременное опрыскивание сельскохозяйственных культур является одним из основных показателей урожайности, поскольку получить высокий урожай без должной защиты практически невозможно. В связи с этим, появляется необходимость в оборудовании, способном эффективно и качественно реализовать данный технологический процесс.
В настоящее время, для большинства сельскохозяйственных предприятий, решением данного вопроса является автоматизация сельскохозяйственных операций путем применения систем точного земледелия, которые подразумевают использование курсоуказателей, подруливающих устройств, гидравлических автопилотов и другого оборудования, предусмотренного для конкретной операции в сельском хозяйстве.
Недостатком таковых устройств является то, что они служат прицепными к машинно-тракторному агрегату, что связано с большими эксплуатационными затратами, из которых самыми значительными являются расходы на ГСМ и на обслуживание техники.
С учетом выявленных недостатков, для решения данной проблемы предлагается применение беспилотного агрегата на электротяге, способного выполнять поставленные задачи посредством аппаратно-программного комплекса с микропроцессорной системой управления.
Одним из наиболее распространенных способов внесения жидких препаратов сегодня является полнообъемное опрыскивание. Основной его недостаток – высокие эксплуатационные затраты и загрязнение почвы препаратами, которые стекают с растений в результате излишнего смачивания. Для рациональной обработки предлагается вносить жидкие химикаты холодным туманом посредством беспилотного электроагрегата с автоматической системой управления движением по сигналам ГЛОНАСС навигации. Все это, в совокупности, позволит устранить указанные недостатки.
1 АНАЛИЗ СОВРЕМЕННОГО СОСТОЯНИЯ ОБРАБОТКИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР
1.1 Структура производства продукции растениеводства в Российской Федерации
Растениеводство в Российской Федерации является ведущей отраслью сельского хозяйства, занимающаяся главным образом возделыванием культурных растений для производства продукции растениеводства.
Российская Федерация располагает значительным объемом земельных угодий, содержащих производственный потенциал. Россия занимает 1-е место в мире по производству ячменя и сахарной свёклы, 3-е место по производству пшеницы и недавно стала её крупнейшим экспортёром, входит в число крупнейших производителей подсолнечника, картофеля, овощей. О значимости растениеводства также говорит и тот факт, что на его долю приходится 54% всей сельскохозяйственной продукции страны. Структура растениеводства по видам производителей представлена на рисунке 1.1. [33]
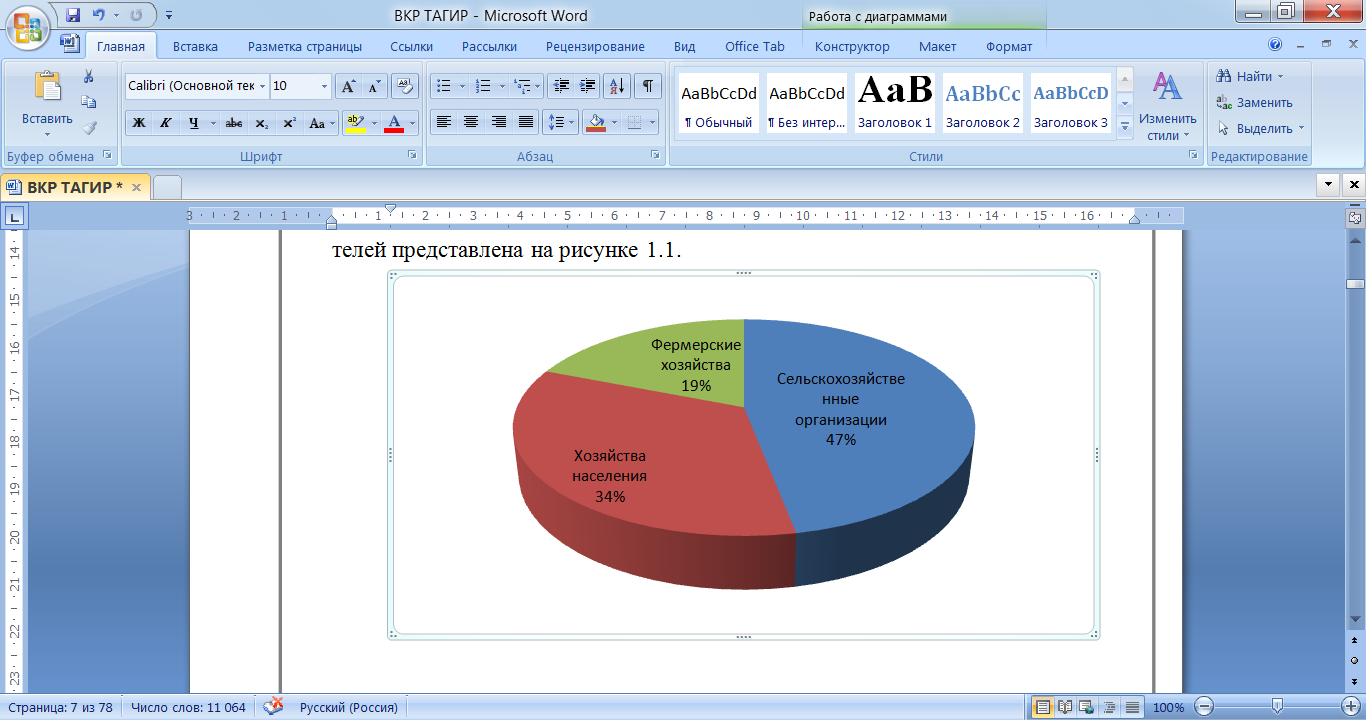
Рисунок 1.1 — Структура растениеводства по видам производителей
Главными регионами растениеводства являются Центральный, Приволжский и Южный федеральные округа. На них в сумме приходится более 2/3 общероссийского производства.
Производство продукции растениеводства в стране направлено на внутренний рынок страны. Можно определить следующие отрасли растениеводства.
Первая группа – это зерновые. Продукция, вырабатываемая отраслью, реализуется в двух направлениях: хлебные культуры и бобовые.
На втором месте в структуре отрасли растениеводства — культуры, используемые для удовлетворения потребностей промышленности.
И третья, пропашные культуры, выращиваемые для внутреннего рынка. Используются как для продажи в необработанном виде конечному потребителю, так и для реализации с целью последующей переработке соответствующим сельскохозяйственным предприятиям.
По данным экспертно-аналитического центра агробизнеса, основная часть посевной площади используется под зерновые и зернобобовые культуры, в том числе под пшеницу — 34 %, ячмень — 11%, овёс — 4 %, кукурузу — 3%. Остальная часть — кормовые культуры (21%), технические культуры (16%), картофель и овощебахчевые культуры (4%). Общий размер площадей составляет 79,3 млн га. Структура посевных площадей в России представлена на рисунке 1.2.
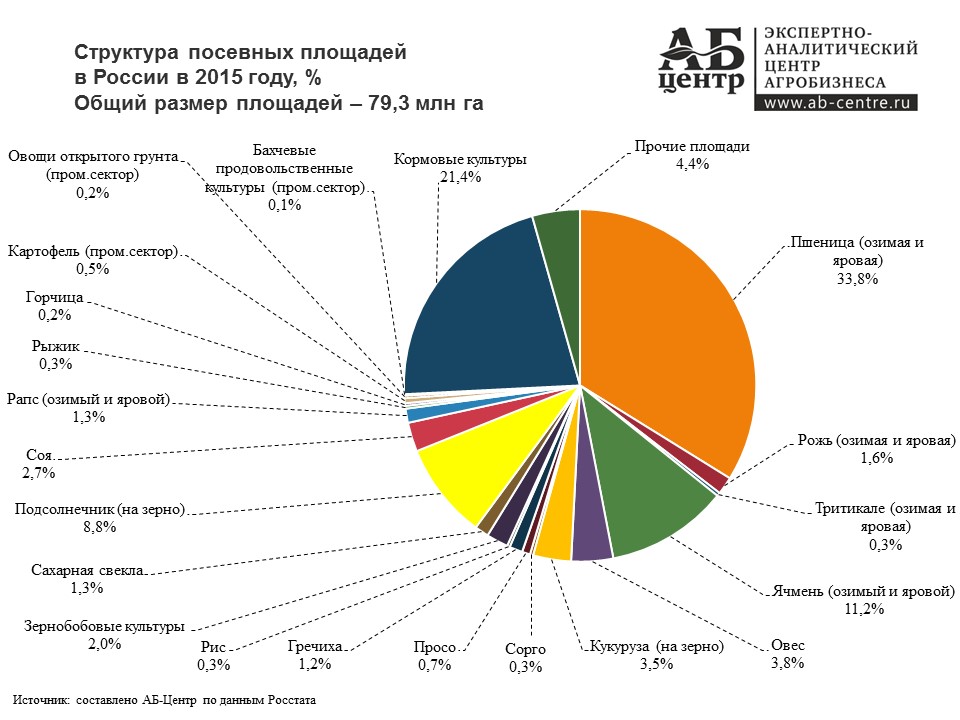
Рисунок 1.2 Структура посевных площадей в России
Как показано на рисунке 1.2, высокую долю в общих размерах посевных площадей занимают пропашные культуры.
Данные сведения о посевных площадях картофеля, овощей и бахчевых культур представлены только по сельскохозяйственным организациям и крестьянско-фермерским хозяйствам, без учета хозяйств населения.
1.2 Факторы, влияющие на урожайность сельскохозяйственных культур
Выращивание урожая и формирование урожайности — сложный и длительный материальный процесс, связанный с действием многих факторов. Их можно разделить на две большие группы: природные и экономические. Природные факторы (условия) включают в себя состояние и качество почв, метеорологические и климатические условия произрастания культур. Экономические условия создаются людьми в процессе их хозяйственной деятельности в рамках определенных территорий — предприятий, хозяйств, севооборотов, полей, производственных, опытных и других участков.
Экономические условия в наиболее общем виде характеризуются уровнем развития производственных сил общества, что позволяет компенсировать низкое качество почв и неблагоприятные метеорологические (климатические) условия и достигать высокой урожайности.
В каждом конкретном предприятии и хозяйстве экономические условия проявляются через уровень интенсификации. Он оценивается показателями обеспеченности ресурсами на единицу площади земельных угодий. Ресурсы берутся в целом (основные фонды, оборотные средства, рабочая сила, затраты, объем работ) и с выделением важнейших для формирования урожайности их видов: рабочих и силовых машин, семян, органических и минеральных удобрений, механизаторов и специалистов и т.п. Показатели могут рассчитываться на 1 га сельскохозяйственных угодий, пашни, площади посева отдельных культур в зависимости от степени обобщения объема ресурсов (затрат) и задач анализа. Существенно важно для характеристики интенсификации земледелия в целом учитывать не только уровень обеспеченности ресурсами, но и их состав, качество и степень использования.
Непосредственно урожайность определяется уровнем агротехники, которая является формой интенсификации возделывания каждой культуры. Показатели агротехники зависят от уровня интенсификации, а также от специализации производства, обеспечивающей концентрацию ресурсов возделывания данной культуры [12].
При прочих равных условиях уровень агротехники зависит от качества работы специалистов, отдельных работников и их коллективов, от уровня организации труда и управления.
Таким образом, рассмотрим влияние экономических факторов на изменение урожайности зерновых культур на основе данных представленных в таблице 1.1.
Таблица 1.1 – Факторы, влияющие на урожайность зерновых культур
| № п/п | Показатели урожайности и ее факторов | Года | ||||
| 2014 | 2015 | 2016 | 2017 | 2018 | ||
| 1 | Урожайность зерновых культур с 1 га, ц | 14,4 | 15,6 | 19,4 | 19,6 | 17,8 |
| 2 | Обеспеченность в расчете на 100 га посевной площади:
— ОПФ, тыс. руб. — рабочая сила, чел. — энергоресурсы, л.с. |
257
6,2 333 |
236
6,2 329 |
224
6,0 321 |
235
5,9 304 |
238
5,9 303 |
| 3 | Внесено на 1 га посевов удобрений:
— органические, т — минеральные, кг |
2,8
86 |
3,2
131 |
3,8
156 |
4,0
154 |
3,6
158 |
| 4 | Нагрузка пашни на 1 трактор, га | 126 | 120 | 116 | 118 | 113 |
Таким образом, данные таблицы показывают, что наиболее важными факторами, влияющими на урожайность сельскохозяйственных культур, является внесение органических и минеральных удобрений, а также нагрузка пашни на 1 трактор.
1.3 Существующие способы внесения жидких удобрений
Защита растений является одним из дорогостоящих и обязательных мероприятий, связанных с производством продукции растениеводства. Поэтому, для высоких показателей урожайности важно правильно выбрать опрыскиватель и способ внесения удобрений.
Не смотря на технический прогресс и большой выбор сельскохозяйственной техники, в настоящее время, встречаются хозяйства которые вручную опрыскивают свои угодья. В основном, такие хозяйства располагают площадью до 100 Га. В данном случае, преимущественно используются опрыскиватели ранцевого типа, которые представлены на рисунке 1.3.

Рисунок 1.3 Опрыскиватель ранцевого типа
Ранцевые опрыскиватели делятся на два типа: механические и с источником питания. Дальность радиуса опрыскивания механических опрыскивателей составляет 0,5…2 м, в то время как у моторных до 12 м. Данный вид опрыскивания подходит для обработки небольших территорий до 1 га (садовые участки, теплицы).
Из всех явных недостатков ручного опрыскивания, отметим самые значительные:
— трудоемкость процесса;
— ограниченность возможностями человека;
— непосредственный контакт химикатов и рабочего при опрыскивании.
Следующим типом опрыскивателей, исключающим вышеперечисленные недостатки и рассчитанные на обработку больших территорий являются опрыскиватели сельскохозяйственного назначения, которые подразделяются на навесные, прицепные и самоходные. По типу распределительного устройства – на вентиляторные, штанговые и штангово-вентиляторные (комбинированные), а по степени дисперсности распыления и нормам внесения сельхозхимии на единицу обрабатываемой площади – на полнообъемные, малообъемные и ультрамалообъемные опрыскиватели [16].
Опрыскиватели навесного типа идеально подходят для эксплуатации в маленьких фермерских хозяйствах, где площади сельскохозяйственных полей не превышают 1000 га. Данный тип опрыскивателей представлен на рисунке 1.4.

Рисунок 1.4 Навесной опрыскиватель
Крепление навесного опрыскивателя осуществляется на специальную навеску в тракторе. Он состоит из небольшого по объёму бака, вмещающего в себя от 600 до 800 литров жидкости. Штанги агрегата характеризуются шириной рабочего размаха в пределах 12…18 м.
Главным достоинством опрыскивателей навесного типа является их стоимость. Навесные опрыскиватели характеризуются прекрасной манёвренностью, их можно эксплуатировать в комплекте с тракторами отечественного изготовления. Но есть у такого оборудования и недостаток – его производительность недостаточно высока.
Более крупные сельскохозяйственные предприятия, имеющие до 4000 га зерновых или пропашных и до 500 га овощных, могут иметь в своем расположении агрегаты с объемом бака 3000…4000 л. Как правило, это прицепные опрыскиватели (рисунок 1.5). Прицепной опрыскиватель в сельскохозяйственной отрасли считается самым популярным видом техники для обработки почвы. Размах его навесных штанг составляет около 24…36 м.

Рисунок 1.5 Прицепной опрыскиватель
Отличная производительность в совокупности с возможностями обработки полей большой площади без дозаправки резервуара является главным преимуществом опрыскивателей прицепного типа. Есть у такой техники и свои недостатки. Например, если происходит обработка высокорослой растительности, то есть большой риск их повреждения во время прохода техники по полю. Связано это с маленьким клиренсом трактора. Так же, существенным недостатком прицепных опрыскивателей является низкая маневренность.
Крупным производителям продукции растениеводства, располагающим площадями свыше 4000 га посевов, рекомендуется обратить внимание на машины, в бак которых помещается 3600 л и даже 12000 л. С такими параметрами выпускаются уже не только прицепные, но и самоходные опрыскиватели (рисунок 1.6).

Рисунок 1.6 Самоходный опрыскиватель
Самоходные модели опрыскивателей появились на рынке сельхозтехники не так давно, однако уже смогли завоевать популярность. В их основе лежит полностью автономная система, разработанная для опрыскивания культурных растений. Этот вид техники обладает высокой производительностью, клиренсом до 1,5 м. Преимущества — это отсутствие необходимости в установке и демонтаже элементов устройства, а также – высокая степень манёвренности.
Важным этапом подготовки опрыскивателей к работе является выбор требуемого типа распылителей, правильная их установка на штанге и проверка качества работы. От этого в решающей степени зависят результаты использования пестицидов.
В состав системы распыла входят и отсечные устройства, предназначенные для предотвращения выливания рабочей жидкости из гидрокоммуникаций опрыскивателя после отключения давления, а также для крепления и пространственной ориентации распылителей.
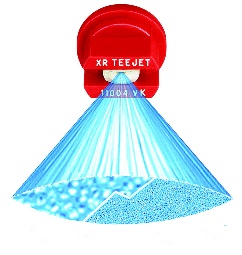
На штанговых опрыскивателях широко применяются гидравлические распылители различных типов (рисунок 1.7): щелевые, дефлекторные, центробежные (вихревые) и центробежно-струйные. Эти распылители имеют ряд преимуществ, среди которых основными являются простота в устройстве и эксплуатации, надежность в работе.
В процессе распыления за счёт давления поток жидкости дробится на капли. Из-за сужения соплового канала внутри распылителя жидкость ускоряется. При выходе из сопла распылителя давление падает и жидкость распространяется в заданном геометрией сопла направлении. При этом вначале образуется гладкая плёнка, которая под воздействием воздушной среды становится неустойчивой и волнистой. В итоге она распадается на нити. Нити, в свою очередь, распадаются на капли различной величины, которые и формируют факел распыленной жидкости [30].
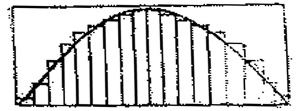
Щелевые распылители (рисунок 1.7, а) представляют собой насадок с щелевидным соплом (или несколькими соплами). Распределение жидкости в пределах факела распыла близко к треугольному, что обеспечивает высокую равномерность распределения жидкости при перекрытии факелов распылителей, установленных на штанге опрыскивателя.
Размеры капель, образуемых щелевыми распылителями, зависят от размера сопла, угла при вершине факела и давления жидкости в системе нагнетания опрыскивателя.
Распылители изготавливаются из специального химически стойкого пластика, относящегося к классу полиоксиметиленов. Износостойкость этого материала уступает только керамике, превосходя нержавеющую сталь в два раза, а латунь — более чем в 30 раз.
В зависимости от размера выходного отверстия и создаваемого рабочего давления щелевые распылители могут обеспечивать мелко- или крупнокапельный распыл жидкости. Меньший размер отверстия и большее давление позволяют получить повышенную дисперсность дробления жидкости. Щелевые распылители обычно имеют равномерную эпюру распределения жидкости по ширине факела распыла, что в свою очередь способствует получению равномерного распределения пестицидов по всей ширине захвата штанги. Они способны качественно вносить растворы любых типов пестицидов.
Борьба с наличием склонных к испарению мелких капель в факеле распыла щелевых распылителей привела к созданию двух их разновидностей, несколько улучшивших качество дробления жидкости.

Раствор
Корпус распылителя
Сердцевина
Сопло


а


г
д

Фильтр
Прокладка
Диск
Сердечник
Байонентная гайка
е
ж
в
б
Дополнительная шайба
Рисунок 1.7 Основные типы распылителей и эпюры распределения
жидкости: а – щелевой; б – с дополнительной шайбой;
в –инжекторный; г – дефлекторный; д, е – вихревой (центробежный) с полым конусом распыла; ж – вихревой (центробежный) со сплошным конусом распыла
Достаточно простым решением (рисунок 1.7, б) является установка в щелевой распылитель дополнительной шайбы с отверстием, ось которого совпадает с осью сопла распылителя. Производительность распылителя определяется диаметром отверстия в шайбе, что позволяет увеличить площадь проходного сечения сопла. Поток жидкости перед выходом из сопла более турбулизирован, чем в обычном распылителе, что предотвращает образование жидкостной пленки на выходе из сопла. В результате, по данным фирм-разработчиков, относительное количество мелких капель в факеле распыла снижается до 4 – 5 %, что значительно меньше, чем при работе обычного распылителя. Распылители этого типа рекомендуется использовать при скорости ветра до 8 м/с.
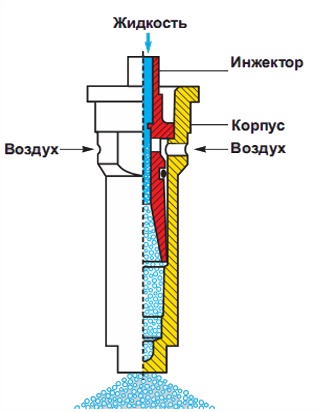
Более эффективным (и сложным) решением является инжекция воздуха в распылитель (рисунок 1.7, в). Преимущества данного типа распылителей заключаются в следующем:
— снижается снос рабочей жидкости ветром из-за значительного уменьшения количества мелких капель в факеле распыла;
— увеличивается степень покрытия растений при неизменном расходе жидкости на единицу площади;
— увеличивается производительность опрыскивателя в результате снижения нормы внесения рабочей жидкости (примерно в два раза);
— обеспечивается лучшее проникновение в растительный покров;
— отсутствуют потери пестицида из-за скатывания крупных капель с поверхности листьев растений, так как их удельный вес значительно ниже, чем у обычных капель;
— существует возможность эксплуатации распылителей в более широком диапазоне давлений;
Недостатком инжекторных распылителей является сложность конструкции.
Для более грубого распыла пестицидов и внесения жидких минеральных удобрений могут использоваться дефлекторные распылители (рисунок 1.7, г). При их работе через подводящее отверстие (диаметром 1,6; 2,0 или 4,0 мм) подается струя жидкости, которая ударяется в отражательную поверхность и сходит с нее в виде тонкой пленки. Пленка жидкости на небольшом расстоянии от распылителя распадается на капли диаметром 250…400 мкм, обеспечивая плоский факел распыла с углом до 135…1400. Эпюра распределения жидкости по ширине факела имеет «всплески» по краям, поэтому для достижения равномерного внесения пестицидов необходима тщательная регулировка высоты установки штанги над обрабатываемой поверхностью.
Вихревой (центробежный) тип распылителя с полым конусом распыла имеет два вида конструкции: первый – в корпусе установлена шайба с калиброванным отверстием и завихритель (рисунок 1.7, д); второй – раздельные диск и сердечник (рисунок 1.7, е). У полевых экономичных распылителей диаметр выходного отверстия 1,25 мм и шаг резьбы завихрителя – 3 мм. Распылители данного типа обеспечивают конусный распыл без капель посредине. Эпюра вихревого распылителя представляет «двухвершинное» распределение жидкости по ширине захвата и повышает общую неравномерность внесения пестицидов.
Варианты центробежных распылителей (центробежно-дисковых, струйных) со сплошным конусом распыла обеспечивают выход жидкости в виде заполненного конуса с равномерным распределением по ширине факела (рисунок 1.7, ж). Однако устройство подобных распылителей более сложно, они склонны к забиванию и находят ограниченное применение.
Конструкции современных распылителей постоянно совершенствуются. Одним из перспективных направлений является использование двущелевых распылителей. Совершенствование распылителей часто направлено на получение монодисперсного распыла с регулируемым размером образуемых капель.
Вентиляторный опрыскиватель предназначен для химической обработки полей, садов, промышленных складов, зернохранилищ и других территорий. Отлично подходит для краевых обработок полей: проведения работ по химзащите растений инсектицидами и фунгицидами.
Особенность данного вида опрыскивателя заключается в способе внесения химпрепарата на площадь. Мощный вихревой поток, генерируемый воздушным винтом, подхватывает химпрепарат, распыляемый форсунками и переносит на расстояние до 200 метров, пробивая лесополосы, плотные заросли подсолнечника или кукурузы. Аэрозольный способ химобработки с большим успехом показал себя в садах и на полях, позволяя эффективно бороться с вредителями. Вентиляторный опрыскиватель представлен на рисунке 1.8.

Рисунок 1.8 – Вентиляторный опрыскиватель
Для защиты зерновых культур наиболее широко используется авиационное опрыскивание в борьбе с черепашкой (90% химических работ), хлебными жуками, гусеницами зерновой совки, хлебной жужелицей, саранчовыми, злаковыми мухами, тлями, гороховой зерновкой.
Особенно широко применяется авиационное малообъемное опрыскивание посевов концентрированными растворами, эмульсиями и суспензиями с небольшим расходом жидкости, чаще всего 25…50 л на 1 га. При сокращении расхода рабочей жидкости с 50 до 25 л на 1 га часовая производительность самолета повышается на 30%, а себестоимость опрыскивания снижается на 15…30%, Основной объем авиационно-химических работ выполняет самолет Ан-2. В борьбе с вредителями зерновых культур, сахарной свеклы и картофеля он опрыскивает в день 318…649 га, а за сезон 6000…7000 га.
Внутри фюзеляжа самолета Ан-2 устанавливается бак емкостью 1400 л. Трубчатые штанги с 80 распылителями, размещенные под нижним крылом самолета, присоединены к нагнетательным трубам насоса. Восьмилопастный ветряк работает от встречной струи воздуха и приводит в действие насос, в результате жидкость под давлением направляется из бака к распылителям. Перемешивание жидкости в баке осуществляется гидравлической мешалкой.
Самолет загружается жидкостью через заправочную трубу с эжектором или через верхние загрузочные люки бака. Скорость полета Ан-2 при опрыскивании посевов 155…160 км/ч, а вертолетов 20…80 км/ч. Производительность летательных машин зависит от нормы расхода жидкости, ширины захвата, размера участка и его удаленности от аэродрома. Так, при борьбе с черепашкой (расход жидкости 25 л на 1 га, ширина захвата 30 м) производительность самолета Ан-2 достигает 120 га/ч.
Самолет Ан-2М (модернизированный) оснащен новым оборудованием, емкость бака 1960 л. Кабина отделена от грузового помещения, что защищает пилота от контакта с ядохимикатами. Насос опрыскивателя приводится во вращение с помощью коробки отбора мощности от двигателя самолета. Штанга увеличена до 21 м, ширина рабочего захвата при опрыскивании достигает 40 м. Бак заправляется жидкими химикатами при помощи специальной заправочной системы. Авиационное опрыскивание представлено на рисунке 1.9.

Рисунок 1.9 Авиационное опрыскивание
Кроме самолетов, успешно работают на защите растений вертолеты. Они могут базироваться на малых лётных площадках, набирать высоту, снижаться по крутой траектории и перемещаться в любом направлении. При мощном нисходящем потоке воздуха достигается хорошее покрытие химикатами листьев с верхней и нижней стороны.
Авиаопрыскивание проводится при слабом ветре рано утром, с восходом солнца, и продолжается до 9…10 часов; вечером опрыскивают посевы в течение 2…3 часов до захода солнца. Самолеты летают над посевами на высоте 5 м.
Повышение производительности самолетов и вертолетов во многом зависит от организации загрузочных работ на аэродроме. Межхозяйственные аэродромы хорошо оборудованы, имеют твердое покрытие взлетно-посадочных полос, загрузка самолетов механизирована. Для текущего ремонта самолетов и вертолетов выделяется полевая мастерская.
Одним из главных преимуществ авиации является возможность вносить удобрения в ранневесенний период, когда наземная техника не может пройти по полю. Главным же недостатком воздушного метода считается дороговизна, которая связана с высокой стоимостью топлива, масел и запчастей.
Наряду с авиационным опрыскиванием, в последнее время наблюдается воздушное опрыскивание посредством беспилотных летательных аппаратов (БПЛА) (рисунок 1.10).

Рисунок 1.10 Воздушное опрыскивание посредством дрона
Опрыскивание с дронов может проводиться как минимум в двух форматах: «классическом авиационном», когда химикаты распыляются по всему полю, и «точечном», совмещенным, например, с предварительным осмотром посевов при помощи мультиспектральных камер [31].
Факторы, стимулирующие внедрение дронов для опрыскивания:
— беспилотники эффективны в районах со сложным рельефом, например, на фермах с крутыми склонами. В таких условиях эффективность ручного труда сокращается, к тому же, многие малые хозяйства не могут оплатить услуги традиционной пилотируемой авиации.
— БПЛА отлично подходят для работы в условиях повышенной влажности — там, где использование наземной техники невозможно или затруднено.
— внедрение дронов обеспечивает отказ от ручного опрыскивания — сезонные рабочие не контактируют с опасными химикатами.
— дроны летают ниже, чем пилотируемые самолеты и вертолеты, что обеспечивает высокую точность опрыскивания, экономию химикатов и минимизацию вреда для окружающей среды.
— в развитых странах имеет смысл задействовать дроны, способные заменить пилотируемую авиацию или дорогостоящую наземную технику.
— дроны можно использовать для точечного опрыскивания сорняков гербицидами или полезных культур — пестицидами. Точечный подход, основанный на предварительном анализе цифровых изображений с камер робота, позволяет минимизировать расходы химии, снизить химическую нагрузку на почву, воду, культуру и, в конечном счете, на организм потребителей, добиваясь при этом более высоких результатов выращивания культуры, чем при традиционных подходах.
Факторы, сдерживающие распространение дронов для опрыскивания:
— несмотря на высокую автономность современных беспилотников, большинство из них до сих пор требуют наличия “группы поддержки”, состоящей из операторов, программистов и обслуживающего персонала — что, в свою очередь, негативно отражается на издержках потребителей.
— законодательство развитых стран должно быть приведено в соответствие с реалиями нового времени. Ряд существующих ограничений препятствуют внедрению БПЛА, работе дронов за пределами прямой видимости оператора, полетам в автономном режиме и отдельным применениям агродронов.
Перспективы развития БПЛА:
— такие технологии, как удержание высоты и полосы опрыскивания постепенно становятся отраслевым стандартом.
— разработчики оптимизируют геометрию аппаратов — пропеллеры отдельных современных дронов порождают воздушные потоки, искажающие траектории движения капель распыляемых веществ. Управление потоками выпускаемой жидкости станет центральным вопросом, связанным с оптимизацией и разработкой агродронов.
— ожидается появление формализованных отраслевых стандартов.
— ожидается рост конкуренции со стороны наземных роботов с функциональностью химической обработки.
1.4 Аэрозольная обработка в сельском хозяйстве
Пестициды широко применяются в современном сельском хозяйстве для борьбы с вредителями и болезнями сельскохозяйственных культур.
Известно множество способов защиты растений. Несмотря на все свои недостатки, для настоящего времени и ближайшего будущего наиболее распространённым среди них является химический.
Современный уровень развития сельского хозяйства предъявляет к средствам механизации защиты растений всё более высокие требования. Главные из них — обеспечение качественной обработки культур с минимальным расходом рабочей жидкости.
При биологической защите растений, масштабы которой непрерывно растут, многие биопрепараты применяются в форме аэрозолей. Для их создания используется специальная аппаратура (генераторы). В связи с требованиями, предъявляемыми к машинам для генерации аэрозолей, важное значение приобрёл вопрос об их модернизации.
Рассмотрим общие понятия и определение аэрозоля.
Аэрозолем называется дисперсная система, состоящая из газообразной дисперсионной среды и твёрдой или жидкой дисперсной фазы, иначе говоря, это взвесь твёрдых или жидких частичек в газе.
Обработка аэрозолями – эффективный приём, позволяющий существенно улучшить равномерность покрытия обрабатываемых поверхностей ядохимикатом, снизить его расход, значительно увеличить производительность процесса. Обычно аэрозоли представляют собой частицы твёрдого (дымы) или жидкого (туманы) пестицида, взвешенные в воздухе. Первые получают от сжигания (без пламени, путём тления) дымовых шашек, таблеток, различных горючих материалов, пропитанных раствором ядохимиката (гексахлорана и др.), путём их возгонки с помощью различных нагревательных приборов (керосинок, электроплиток, специальных электроламп).
Туманы могут быть получены механическим, термическим и термомеханическим способами, среди которых наиболее распространённым является последний. В этом случае, аэрозоли образуются дроблением рабочей жидкости горячей струёй газа на мелкие капли, которые затем в потоке газа испаряются частично или полностью. Для получения туманов используют растворы пестицидов в специальных растворителях. В качестве последних при обработке полей, садов и виноградников применяют масла со сравнительно высокой температурой кипения (соляровое, трансформаторное и др.).
Туман или дым обладают способностью легко проникать в крону деревьев, внутрь виноградного куста, равномерно распределяясь по всей обрабатываемой поверхности. Благодаря этому токсическое действие пестицида на вредные организмы значительно усиливается. Данный вид химической обработки растений, по сравнению с опрыскиванием, в десятки раз уменьшает расход ядохимиката, значительно увеличивает производительность и повышает качество работ. Аэрозоли позволяют уничтожать вредных насекомых не только на земле, но и в воздухе. Однако применение аэрозолей в полевых условиях затрудняется их трудноуправляемостью и большой вероятностью сноса в стороны и вверх.
Размер частиц колеблется в пределах от 1 до 50 мкм. От их величины в значительной степени зависят такие важнейшие факторы как биологическая активность (токсичность) препарата, эффективность улавливания и удержания жидкости или порошка поверхностью растений, равномерность и полнота покрытия обрабатываемого объекта, явные и неявные потери.
Согласно агротехническим требованиям нормы расхода рабочей жидкости для аэрозольной обработки должны составлять на полевых культурах 1…5 л/га, на многолетних насаждениях – 5…25 л/га.
Мелкие (10…50 мкм) частицы препаратов, применяемых для проведения данного мероприятия, могут быстро испаряться в ходе операции. Во избежание этого используемые для аэрозольной обработки ядохимикаты должны обладать низкой летучестью. Для них также важна достаточно хорошая текучесть. При этом их вязкость не должна значительно варьироваться под воздействием изменения температуры воздуха, поскольку это существенно нарушает установленные режимы расхода жидкости. Кроме того, они не должны угнетать рост и развитие растений, вызывать ожоги листовой поверхности.
Также очень важным показателем качества распыла жидкости при малых расходах является наличие мелко раздробленных частиц, одинаковых по размеру (монодисперсность). Для аэрозольной обработки выпускаются жидкие препараты, предназначенные для борьбы с многими видами вредителей, болезней и сорняков. Их основные свойства — вязкость, летучесть, фитотоксичность. Каждый из применяемых для аэрозольной обработки препаратов имеет свои значения данных показателей.
Нельзя не учитывать также то, что они высокотоксичны и более высокая дисперсность распыла жидкости вызывает больший их снос.
Многочисленные исследования показывают, каким образом эти два фактора взаимосвязаны между собой. Крупные частицы имеют значительно меньшую токсичность для вредных организмов. Но в то же время они могут повреждать культурные растения, вызывая ожоги листьев. Мелкие частицы при одинаковом расходе ядохимиката на единицу площади более полно и равномерно покрывают поверхность обрабатываемого объекта. Также от размера частиц в значительной степени зависит эффективность удерживания пестицида листьями растений. Таким образом, уровень данного показателя тем выше, чем мельче распыл жидкости.
Влияние размера частиц на величину потерь ядохимиката связано со способом его доставки от машины к объекту обработки. Агрегаты для химической защиты сельскохозяйственных культур, в частности, аэрозольные генераторы, осуществляют транспортировку пестицида к растению с помощью турбулентных струй. Они дают минимальные потери ядохимиката, количество которых находится в прямой зависимости от размера частиц.
Наиболее крупные из них, расположенные ближе к центру струи, обладают большей инерционностью. При встрече с препятствием они сталкиваются с ним и осаждаются на его передней, лобовой поверхности. Мелкие (менее инерционные) расположены ближе к краю струи. Они в месте с воздушным потоком огибают препятствие. При этом происходят явления завихрений и турбулентной диффузии. В результате чего мелкие частицы осаждаются на оборотной стороне препятствия. Таким образом, с помощью турбулентных струй они доносятся до растения и осаждаются в самых труднодоступных его местах с минимальными потерями. В связи с этим наметилась тенденция к более широкому применению аэрозольной обработки растворами с высокой концентрацией ядохимиката, что даёт большое снижение расхода рабочей жидкости.
Для проведения данной операции применяются специальные машины – аэрозольные генераторы различных типов, в которых жидкость дробится на мелкие частицы при истечении из распылителей. В одних этот процесс осуществляется под давлением, у других — в результате воздействия скоростного потока воздуха, центробежных или электростатических сил. Также аэрозоли (туманы и дымы) образуются посредством испарения пестицида с последующей конденсацией его перегретых паров (термические). Машина для их создания (генератор) может быть наземной (тракторной, автомобильной), или авиационной (действует с летящего самолёта или вертолёта). На размер частиц пестицидных аэрозолей существенное влияние оказывает не только тип, но и режим работы машины, а их поведение после образования – рассеяние, осаждение на растениях, испарение – очень сильно зависит от метеорологических условий, свойств растительного покрова и местности.
Между тем использование пестицидных аэрозолей в современном сельском хозяйстве пока ведётся без должного учёта всех выше перечисленных факторов
Серьёзные трудности возникают у конструкторов при выборе материалов для генераторов. Это связано с весьма высокой химической активностью применяемых для аэрозольной обработки препаратов. Поэтому для конструирования аэрозольных генераторов требуются материалы, способные выдерживать длительный контакт с ядохимикатами. Однако таким качеством обладают только коррозионно-стойкие стали и некоторые виды пластмасс. Поэтому все детали, соприкасающиеся с препаратами для аэрозольной обработки, выполняются из конструкционных материалов с высокой химической стойкостью. Это, в свою очередь, удорожает стоимость конструирования генераторов и делает этот метод менее экономичным.
Внедрение аэрозольной обработки в сельское хозяйство сопряжено с необходимостью решения ряда серьёзных задач, требующих создания специальных для проведения данной операции машин. Это вызвано специфическими требованиями, предъявляемыми к конструкциям их узлов и рабочих органов, качеству работы, применяемым материалам, технологии проведения технологического процесса, санитарно-гигиеническим условиям труда и охране окружающей среды.
В настоящее время необходимо на должном уровне понимать всю сущность процессов, происходящих при аэрозольной обработке, иначе при наличии сложной высокопроизводительной аппаратуры и дорогостоящих высокоэффективных пестицидов могут возникнуть самые нежелательные последствия такие, как снижение технической эффективности, перерасход пестицидов, ухудшения экономических показателей проведения операции, неконтролируемый снос частиц и паров ветром на соседние поля, загрязнение среды обитания человека и полезной фауны.
1.5 Робототехнические средства в растениеводстве
В настоящее время находят практическое применение беспилотные тракторы и сельскохозяйственные агрегаты с интеллектуальными системами управления движением и техническим зрением, способные качественно выполнять технологическую операцию. Применение сельскохозяйственных роботов направлено в первую очередь на повышение экологической безопасности продукции и увеличение урожайности продукции.
В зарубежных странах данное направление уже активно развивается, однако серийное производств технических решений отсутствует. На данном этапе это — научные работы, патенты, эксперименты с опытными образцами. Рассмотрим наиболее перспективные компании, разрабатывающие роботов, способных осуществить такой необходимый технологический процесс как опрыскивание.
Разработка Российской инновационной компании «Avrora Robotics» Агробот. Колесный беспилотный роботрактор, представленный на рисунке 1.11, состоит из «комплекта автоматизации» трактора, диспетчерского центра и ряда вспомогательных систем. Решение может применяться для автоматизации работ в сельскохозяйственной или коммунальной сфере.

Рисунок 1.11 Разработка Российской инновационной
компании «Avrora Robotics»
Робот Дэвида Доурхаута «Aquarius» способен перевозить 114 литров воды и используется для полива тепличных растений (рисунок1.12). Робот работает в двух режимах: фиксированный и пропорциональный. В первом случае, аграрий сам устанавливает нужную дозу для полива растений и потом уже аппарат работает по заданным настройкам. Второй вариант — робот с помощью сенсоров анализирует сколько воды нужно каждому растению и сам решает вопрос дозировки.
Помимо полива растений Aquarius может также открывать двери и перемещаться между комнатами — это весьма удобно, если растения находятся в разных помещениях.

Рисунок 1.12 Робот для полива тепличных растений «Aquarius»
Следующая разработка, прототип колесного роботрактора (концепт — Autonomous Concept Vehicle) для автономной работы на поле (рисунок 1.13). Разработчик — Компания CNH Industrial NV (Нидерланды), модель — «Case IH Magnum». Представлен летом 2016 года. Мощность двигателя составляет 419 л.с., максимальная скорость до 50 км/ч. В данной модели отсутствует кабина оператора, так как он оснащен системой технического зрения. Решение о серийном производстве пока не принято. Может работать в условиях тумана, автоматически прекращает работу, если пошел дождь.

Рисунок 1.13 Колесный роботрактор «Case IH Magnum»
Автономный полевой робот BoniRob (рисунок 1.14) для экспериментов по обработке отдельных растений. Данный робот оснащен самостоятельной системой навигации, имеет возможность составлять карты проведенных работ, подготавливать документацию, включая создание базы статистики. Разработчики — стартап Deepfield Robotics компании Bosch, Amazonen Werke совместно с Техническим институтом Оснабрюка и другими.

Рисунок 1.14 Автономный полевой робот BoniRob
Сельскохозяйственный робот Ecorobotics (Швейцария), представленный на рисунке 1.15, предназначен для прореживания и прополки. Оснащен системой компьютерного зрения, предназначенной для идентификации сорняков. Опрыскивает выявленный сорняк небольшой дозой гербецида. Такой подход снижает объем использования гербецидов в разы. Аппарат работает около 12 часов в день. Устройство полностью автономно, программировать его можно посредством смартфона. Испытания нового прототипа начались этой весной, коммерческое производство ожидается в 2020 году.

Рисунок 1.15 Сельскохозяйственный робот Ecorobotics
Во Всероссийском НИИ механизации сельского хозяйства (ВИМ, г. Москва) разрабатываются фундаментальные основы создания и применения: роботов в сельскохозяйственном производстве; специализированного программного обеспечения; средств автоматизации; инновационных машин и оборудования для получения различной информации об объектах обработки; принятия управленческих решений и реализации высокоточных интеллектуальных технологий производства продукции растениеводства и животноводства. Например, это колесный сельскохозяйственный агрегат, где за основу взят трактор Владимирского тракторного завода, предусматривающий автономное управление и модуль опрыскиватель (рисунок 1.16).

Рисунок 1.16 Беспилотный сельскохозяйственный агрегат, разработанный специалистами Всероссийского НИИ механизации сельского хозяйства
Вывод по главе
Наибольшая доля производства продукции растениеводства принадлежит сельскохозяйственным организациям, так как они возделывают свыше 80% всех посевных площадей, затем идут крестьянские (фермерские) хозяйства и наименьшая доля принадлежит хозяйствам населения.
Обеспечение высокой урожайности возможно за счет применения систем точного земледелия, которая подразумевает технологии глобального позиционирования (GPS), географические информационные системы (GIS), технологии оценки урожайности (Yield Monitor Technologies), технологию переменного нормирования (Variable Rate Technology). Одним из важнейших элементов при этом является дифференцированное внесение ЖМУ и ядохимикатов.
Установлено, что опрыскиватель для сельскохозяйственной отрасли требует оценки нескольких критериев: площадь обрабатываемой территории, цель обработки и вид культивируемых растений.
Произведен обзор существующих робототехнических средств, используемых в сельском хозяйстве. Выявлено, что в зарубежных странах данное направление уже активно развивается, однако серийное производств технических решений отсутствует. На данном этапе это — научные работы, патенты, эксперименты с опытными образцами. Тяговые роботы, способные осуществить внесение удобрений, оснащены двигателями внутреннего сгорания, что в свою очередь так же ведет к эксплуатационным затратам, связанным с расходами на ГСМ, ремонт и обслуживание техники. Роботы на электротяге преимущественно представлены в области мониторинга каких либо показателей, за исключением редких случаев – это сбор ягод и фруктов на небольших сельскохозяйственных хозяйствах.
На основе проведенного анализа, было предположено, что повысить технико-экономические показатели обработки сельскохозяйственных культур возможно беспилотным электроагрегатом с функцией внесения ЖМУ холодным туманом.
2 РАЗРАБОТКА АППАРАТНО-ПРОГРАММНОГО КОМПЛЕКСА И БЕСПИЛОТНОГО ЭЛЕКТРОАГРЕГАТА ДЛЯ СИСТЕМЫ ТОЧНОГО ЗЕМЛЕДЕЛИЯ
2.1 Беспилотный электроагрегат
Беспилотный электроагрегат для обработки пропашных культур позволяет дифференцированно и автономно вносить жидкие удобрения посредством холодного тумана. Данная разработка обладает рядом преимуществ по сравнению с традиционными методами обработки растений и последними разработками в этом направлении. Способность выполнять поставленные задачи беспилотным электроагрегатом с аппаратно-программным комплексом и микропроцессорной системой управления полностью исключает из технологического процесса машинно-тракторный агрегат с оператором, что положительно влияет на сокращение эксплуатационных затрат, а также повышает экологичность за счет применения электроприводов и рационального расхода химикатов.

Рисунок 2.1 Беспилотный электроагрегат для обработки пропашных культур
Рама электроагрегата выполнена цельной, прямоугольной формы. Но так же она может быть выполнена шарнирно-сочлененной (подвижная двухсекционная рама, части которой соединены шарниром), что позволит увеличить универсальность применения робота на территориях с различным рельефом опорной поверхности.
В емкости с рабочим раствором установлен генератор холодного тумана, который в свою очередь посредством магистралей осуществляет подачу тумана в зону обработки.
Беспилотный электроагрегат автоматически следует заданным курсом посредством системы управления по сигналам навигационных систем GPS/ГЛОНАСС. Поворот электроагрегата осуществляется за счет разности скорости вращения ротора бесколлекторных двигателей постоянного тока (БКДПТ) каждого колеса, алгоритм которых заложен в системе управления.
Следуя заданным курсом, электроагрегат дифференцированно вносит жидкие удобрения посредством системы управления, открывая и закрывая поток тумана по магистралям в зону обработки, а так же регулируя производительность генератора, путем снижения/повышения подачи напряжения. Технические характеристики беспилотного электроагрегата представлены в таблице 2.1.
Таблица 2.1 Технические характеристики беспилотного электроагрегата для обработки пропашных культур холодным туманом
| № п/п | Наименование величины | Значение |
| Габариты (длина/ширина/высота) | 1740/1500/950 мм | |
| Колея | 1050 мм | |
| Колесная база | 900 мм | |
| Дорожный просвет | 500 мм | |
| Масса без нагрузки | 140 кг | |
| Максимальная разрешенная масса | 260 кг | |
| Запас хода | До 45 км | |
| Тип привода | 4х4 | |
| Мощность | 4*750 Вт | |
| Скорость движения агрегата | 5-15 км/ч | |
| Время работы на одном заряде | До 5 ч | |
| Напряжение питания | 48 В | |
| Объем бака для генератора холодного тумана | 100 л | |
| Расход генератора холодного тумана | 10 л/ч | |
| Ширина захвата | 1,35 м | |
| Мощность генератора холодного тумана | 250 Вт | |
| Напряжение питания | 48 В | |
| Производительность установки | при Vmin – 0,68 Га/ч
при Vmax-2,02 Га/ч |
|
| Максимальная мощность солнечной панели | 400 Вт | |
| Точность GPS/ГЛОНАСС приемника | До 15 см |
2.2 Система автоматического управления электроагрегатом
В наше время на дорогах все чаще появляются электрические виды транспорта. Многие крупные производители уже наладили производство серийных электрокаров. Но, как показывает практика, электротранспорт в АПК менее развит по сравнению с другими отраслями. Использование транспорта на электротяге в сельскохозяйственном производстве скажется на экологичности продуктов питания, снижении эксплуатационных расходов, связанных с ГСМ и обслуживанием МТА [2]. Поэтому внедрение сельскохозяйственных агрегатов на электротяге, является актуальной задачой. Одной из важнейших задач при создании электротяговых систем сельскохозяйственного назначения является разработка управления движением электроагрегата по навигационным сигналам.
Подавляющее большинство современных систем управления электроприводами реализуются на базе цифровых микропроцессоров или микроконтроллеров [1]. Это объясняется значительными вычислительными и логическими возможностями, что позволяет реализовывать сложные алгоритмы управления.
Разработка управляющих систем, обеспечивающих высокую эффективность работы электропровода, процесс постоянного совершенствования: оборудования и способов управления. Чтобы система управления удовлетворяла всем имеющимся требования необходимо учитывать уже имеющиеся научные достижения и решения.
Для наиболее эффективного управления необходимо применять устройства управляемые в режиме реального времени. Количество возможных вариантов по исполнению систем управления весьма велико. Однако для стабильной работы потребуется автоматизированная система, способная анализировать текущее состояние движения агрегата.
В настоящее время, в связи с повышением требований к системам управления растет уровень интеграции микропроцессорных элементов в системах управления электроприводом колес электроагрегата. Ведущие производители промышленной электроники, такие как Siemens, АВВ, OMRON уже выпускают подобные устройства, однако их стоимость очень высока. Поэтому рассмотрели возможность создания подобного типа устройства, которое будет использовать микроконтроллеры фирмы Microchip. С их помощью можно задавать оптимальные параметры вращения колеса и полностью контролировать весь процесс работы системы управления электорагрегата. Целью разработки является создание микропроцессорного устройства, позволяющего на основе информации о положении электроагрегата проводить расчет скорости вращения его колес. Для этого необходима разработка программного обеспечения для расчета скорости вращения управляющего колеса и оценка точности этих расчетов.
Разработанная установка представляет собой беспилотный электроагрегат, предназначенный для обработки пропашных культур. Электроагрегат оснащен четырьмя управляемыми электро-колесами. Каждое колесо приводится в движение посредством бесколлекторного электродвигателя постоянного тока (БКДПТ), типа мотор-колесо, тихнические характеристики которого приведены в таблице 2.2. Мотор-колесо (рисунок 2.2) представляет собой мотор-редуктор [11] с колесом с резиновой шиной и валом для возможной установки диска оптического энкодера.

Рисунок 2.2 Мотор-колесо с редуктором
Таблица 2.2. Характеристика мотор-колеса
| Передаточное соотношение | 1:48 |
| Диапазон напряжения | 12В – 48В |
| Число оборотов холостого хода | 240 оборотов/мин |
| Ток холостого хода | 120мА |
| Скорость вращения колеса | 78 м/мин |
| Крутящий момент | 55 Нм |
Мотор-колеса многофункциональны, так как они выполняют функции распределительных, преобразующих, ходовых и тормозных устройств. Отдельные контроллеры обеспечивают независимое управление каждым мотор-колесом, что является необходимым по причине большой разницы в числе оборотов колес при повороте на небольшой скорости. Проведя анализ различных драйверов было решено, что рационально взять Pololu Dual VNH5019 Motor Driver Shield (рисунок 2.3).
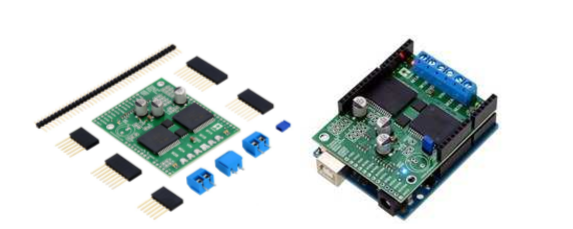
Рисунок 2.3 Плата драйвера двигателя Pololu dual vnh5019
Таблица 2.3 Характеристика Pololu Dual VNH5019 Motor Driver Shield
| Рабочее напряжение силовой части | 12-48 В |
| Число каналов | 2 |
| ШИМ | до 20 кГц |
| Рабочее напряжение логической части | 3,3-5В (логический высокий порог 2,1 В) |
| Выходной ток | 12 А (30 А в пике) на канал (при объединении каналов: 24А/60А) |
Для поворота используется метод бортового разворота или «танковый поворот». Также электроагрегат с мотор-колесами универсален и имеет следующие преимущества:
- возможность индивидуального управления силовым потоком каждого колеса таким образом, что мотор-колеса находящиеся в лучших условиях по сцеплению развивают максимальное тяговое усилие;
- меньшие расходы на обслуживание по сравнению с расходами при механических, и тем более гидромеханических трансмиссиях;
- простота и эффективность автоматизации управления движением.
Электроагрегат снабжается автономным источником электроэнергии – аккумуляторной батареей, заряда которой достаточно для прохождения заданного маршрута, после чего возможна ускоренная зарядка аккумуляторов в течение короткого промежутка времени, либо быстрая замена аккумуляторных батарей.
Разработанная система управления мотор-колесами электроагрегата обеспечивает скалярное управление тяговыми двигателями в функции постоянства мощности [12]. Схематично, требуемая характеристика бесколлекторного двигателя постоянного тока приведена на рисунке 2.4.
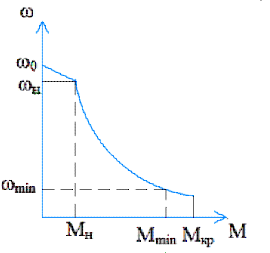
Рисунок 2.4 Требуемая характеристика бесколлекторного двигателя постоянного тока
Для обеспечения требуемой характеристики электропривод содержит драйвер по одному на каждый тяговый двигатель. Система управления принимает в расчет режим работы электроагрегата (движение вперед, задний ход, нейтраль, динамическое торможение, режим холостого хода системы привода), потребляемую мощность и скорость транспортного средства [20].
Блок управления контролирует и управляет системой тягового привода в целом (скоростю вращения колеса, крутящим моментом двигателей, токами прерывателя, системой защиты от пробуксовки и проскальзывания колес).
Функциональная схема системы управления электроагрегата представлена на рисунке 2.5, которая состоит из двух основных частей: силовой цепи и информационного блока. Силовая цепь включает в себя аккумуляторную батарею, зарядное устройство, драйвер и двигатель (мотор-колесо). Информационный блок соответственно включает в себя навигационную систему и систему управления приводом.
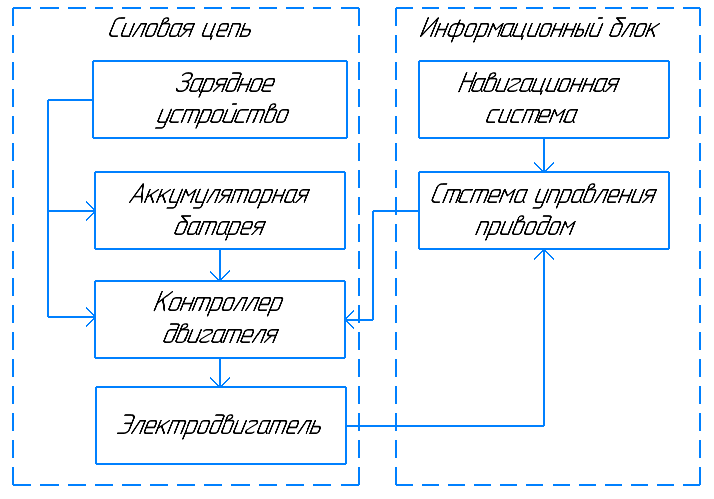
Рисунок 2.5 Функциональная схема системы управления электроагрегатом
В основе системы управления лежит микроконтроллер, позволяющий осуществлять управление контроллером тяговых электродвигателей c использованием обратной связи в функции постоянства мощности, а также реализовывать защиту от перенапряжений и токов, превышающих номинальные значения. Управление осуществляется с помощью широтно-импульсной модуляции напряжения, питающего двигатель. При данном способе управления в отсутствие нагрузки на одном из колес скорость вращения пропорциональна коэффициенту заполнения импульсов. Ядром системы является однокристальный 8-битный RISC микроконтроллер ATmega328 на базе аппаратной платформы Arduino UNO. Arduino — это инструмент для проектирования электронных устройств с возможностью приема сигналов от различных цифровых и аналоговых датчиков и для взаимодействия с окружающей физической средой и управления различными исполнительными устройствами. Эта платформа предназначена для управления процессами с использованием электронно-вычислительных машин с открытым программным кодом, построенная на простой печатной плате с современной средой для написания программного обеспечения. Платы Arduino строятся на основе микроконтроллеров фирмы Microchip [8], а также элементов обвязки для программирования и интеграции с другими схемами. На платах присутствует линейный стабилизатор напряжения +5 В или +3,3 В. Тактирование осуществляется на частотах 8, 16 или 87 МГц кварцевым резонатором. В микроконтроллер предварительно прошивается загрузчик, поэтому внешний программатор не нужен. На концептуальном уровне все платы программируются через RS-232. Среда разработки основана на языке программирования Processing. Строго говоря, это язык С++, дополненный некоторыми библиотеками.
Arduino Uno — этот программно – аппаратная платформа построенная на микроконтроллере AVR ATmega 328 семейства Mega производства фирмы Microchop. Микроконтроллеры семейства Mega являются 8-разрядными микроконтроллерами, функциональная схема которого приведена на рисунке 2.6. Они изготавливаются по малопотребляющей КМОП — технологии, которая в сочетании с усовершенствованной RISC-архитектурой позволяет достичь наилучшего соотношения быстродействие/энергопотребление. Арифметико-логическое устройство, выполняющее все вычисления, подключено непосредственно к 32-м рабочим регистрам, объединенным в регистровый файл. Благодаря этому арифметико-логическое устройство выполняет одну операцию (чтение содержимого регистров, выполнение операции и запись результата обратно в регистровый файл) за один машинный цикл.
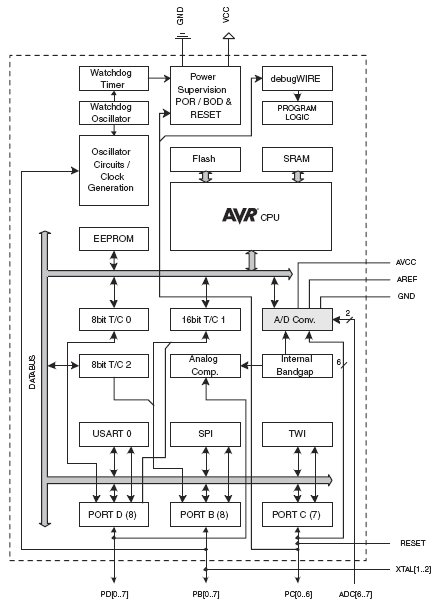
Рисунок 2.6 Функциональная схема микроконтроллеров Atmega328
Платформа имеет 14 цифровых вход выходов (6 из которых могут использоваться как выходы ШИМ), 6 аналоговых входов, кварцевый генератор 16 МГц, разъем USB, силовой разъем, разъем ICSP и кнопку перезагрузки. Для работы необходимо подключить платформу к компьютеру посредством кабеля USB, либо подать питание при помощи адаптера AC DC или батареи. На рисунке 2.7 представлен общий вид платы и упрощённая принципиальная схема. В таблице 2.4 приведены технические характеристики [10].
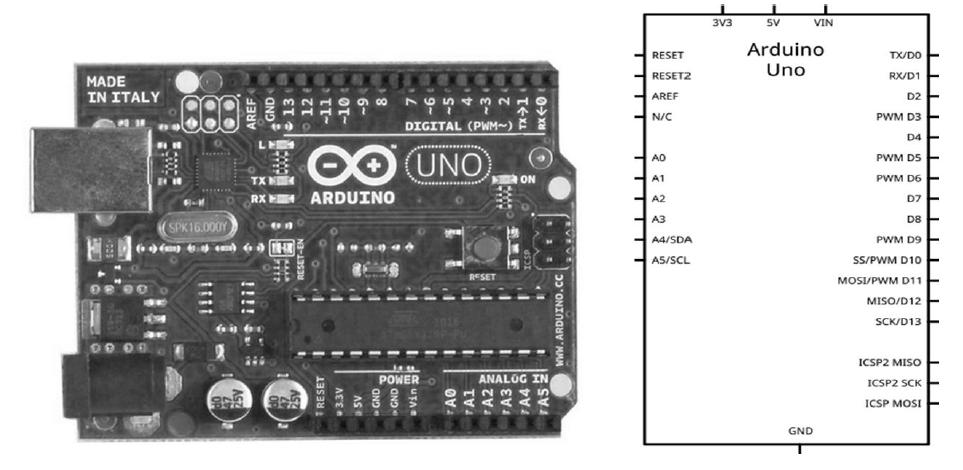
Рисунок 2.7. Общий вид и упрощенная схема
подключения платы Arduino UNO
Платформа Arduino по техническому оснащению идеально подходит для проектирования различных мехатронных систем и их комплексной автоматизации, благодаря понятной среде программирования и возможности наблюдения физических процессов в реальном времени.
Таблица 2.4 Технические характеристики платы Arduino UNO
| Характеристики | Ед.
измерения |
Значения |
| Микроконтроллер | — | ATmega328 |
| Рабочее напряжение | В | 5 |
| Входное напряжение (рекомендуемое) | В | 7-12 |
| Входное напряжение (предельное) | В | 6-20 |
| Цифровые Входы Выходы | шт | 14 (6 из которых могут использоваться как выходы ШИМ) |
| Аналоговые входы | шт | 6 |
| Постоянный ток черезвход выход | мА | 40 |
| Флеш-память | Кб | 32 |
| ОЗУ | Кб | 2 |
| EEPROM | Кб | 1 |
| Тактовая частота | МГц | 16 |
Также система управления включает акселерометр, датчик угловых скоростей и гироскоп, которые находятся на одной микросхеме MPU6050. Микросхема MPU6050 (рисунок 2.8) содержит на борту как акселерометр (устройство, которое измеряет проекцию кажущегося ускорения, то есть разницы между истинным ускорением объекта и гравитационным ускорением), так и гироскоп (представляет собой устройство, реагирующее на изменение углов ориентации контролируемого тела), а помимо этого еще и температурный сенсор. В таблице 2.5 приведены технические характеристики. Помимо этой микросхемы на плате модуля расположена необходимая обвязка MPU6050, в том числе подтягивающие резисторы интерфейса I2C.
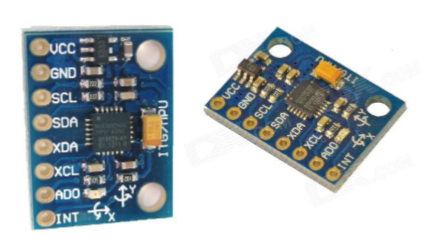
Рисунок 2.8 Гироскоп/акселерометр MPU6050
Таблица 2.5. Характеристика MPU6050
| Напряжения питания | 2,375 — 3,46 В |
| Интерфейс передачи данных / макс. скорость | I2C / 400 кГц |
| Потребляемый ток | до 4 мА |
| Внутренний генератор | 8 МГц (вне модуля возможность подключить внешний кварцевый резонатор на 32,768 кГц или 19,2 МГц) |
Данные измерений датчиков можно считывать как из регистров хранения, так и пользоваться функциями FIFO. Датчики гироскопа и акселерометра изготовлены как MEMS (микроэлектромеханическая система) – внешнее воздействие на датчик сначала изменяет состояние механической части, затем изменение состояния механической части приводит к изменению сигнала электрической части. Одним словом в одном корпусе собрана не только электроника, но и механика.
Микроконтроллер осуществляет опрос датчиков положения ротора мотор-колеса (датчики Холла), датчиков модуля MPU6050 и формирует управляющие импульсы для котроллера мотор-колеса [9], управляемое драйвером Pololu Dual VNH5019 Motor Driver.
Во многих отраслях науки и техники, и в различных системах управления технологическим оборудованием необходимо точное измерение перемещений при большом быстродействии. В промышленности широко распространены фотоэлектрические цифровые оптические энкодеры [28].
В настоящее время во многих БКДПТ используются датчики Холла обратной связи для управления электродвигателем. Несмотря на простоту датчиков Холла, у них имеется существенный недостаток, связанный с жестким положением датчика. Это приводит к нестабильной работе БКДПТ в режиме переходных процессов. В связи с этим, задача оптимального момента включения двигателя электропривода колес электорагрегата в зависимости от отклонения электроагрегата от курса относится к наиболее сложным процессам.
На процесс управления электроагрегатом влияет множество факторов, в том числе, и сложноформализуемые: надежность элементов, узлов (вследствие различных ресурсов наработки); аварийные ситуации; вероятность интенсивности процессов изнашивания элементов и узлов.
Учитывая это, найти точное значение управляемого ШИМ сигнала для контроллера БКДПТ, оказывающее влияние на рациональное функционирование электроагрегата, крайне затруднительно. Задача управления превращается в сложнорешаемую и многокритериальную. В этих случаях, возможно, использовать в системе управления электорагрегатом, энкодерного датчика положения ротора БКДПТ.
Энкодерный датчик – это электромеханическое устройство, которое генерирует выходной импульсный сигнал пропорциональный перемещению. В электроприводах колес можно использовать оптический инкрементальный растровый энкодер. Принцип работы оптического инкрементального растрового энкодера заключается в следующем. Фотодиоды 1 и 2 расположены на расстоянии равным половине штриха растровой ленты так, что излучение от светодиода 3 при перемещении ленты 4 падает с опозданием на полпериода. (рисунок 2.9).
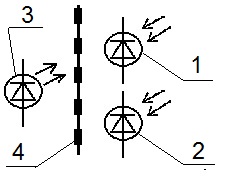
Рисунок 2.9 Схема оптического энкодера
На выходе энкодерного датчика будет сигнал, который представлен на рисунке 2.10.
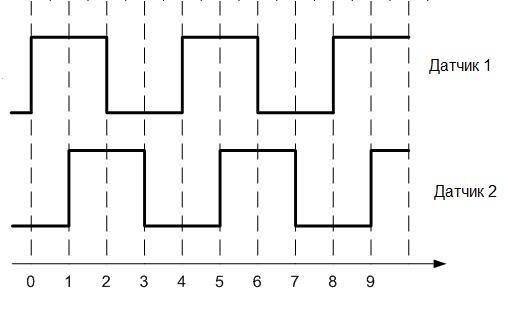
Рисунок 2.10 Форма сигналов датчиков 1 и 2
На рисунке 10 видно, что при движении ленты жестко связанной с ротором БКДПТ в одном направлении (состояния 0-1-2-3-4…) в момент перехода сигнала датчика 1 из состояния 0 в 1 (передний фронт) сигнал датчика 2 всегда находится в состоянии 0 (состояния 0, 4, 8). Если же лента движется в обратном направлении (состояния 9-8-7-6-5…), сигнал датчика 2 всегда находится в состоянии 1 (состояния 6, 2). Отсюда вытекает простейшая процедура обработки сигналов декодера: по переднему фронту сигнала датчика 1 проверить состояние сигнала датчика 2; если он равен 0, увеличить счетчик координаты на единицу, в противном случае уменьшить его на единицу.
С помощью энкодерного датчика реализуется обратная связь по положению ротора, которая заводится в систему автоматического управления и используется в алгоритме управления электроагрегатом.
В качестве энкодерного датчика использовали датчик AK4-2 Ver.A-11 (рисунок 2.11), подключенный к Arduino UNO плате по схеме внешнего прерывания. В данном устройстве механическое вращение ротора преобразуется в электрические сигналы, дающие информацию о перемещении и направлении вращения [5,6,7]. Цифровой сигнал с энкодера подается на входы Arduino UNO платы.
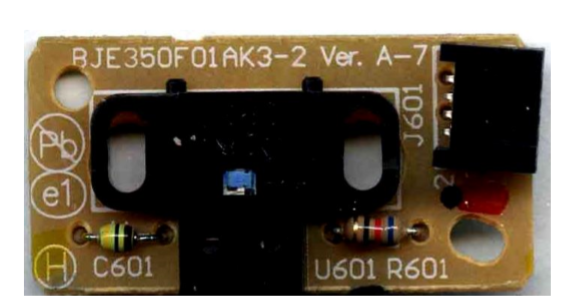
Рисунок 2.11 Энкодерный датчик AK4-2 Ver.A-11
Разработка и отладка программы управления электроагрегатом производится с помощью среды разработки программного обеспечения Arduino IDE. Основой среды разработки является язык Processing/Wiring, широко используемый в прикладных разработках. Данная среда обеспечивает полный цикл разработки, начиная от ввода алгоритма, отладку, и заканчивая внутрисхемным программированием микроконтроллера. Интегрированные технологии создания программы раскрывают новые возможности для программистов. Они позволяют вводить программы на плоскости в виде алгоритма с древовидной структурой. В результате вся логическая структура программы становится полностью наглядной. Основным предназначением таких технологий является максимальное приведение интерфейса разработки к природе человеческого восприятия. Освоение такой среды намного проще, чем освоение классического ассемблера. Более удобный интерфейс раскрывает новые возможности для разработки. Среда предназначена для работы под операционную систему Windows и Lunix подобные системы.
Программный код реализации системы управления электроагрегатом представлена на листинге 1:
Листинг 1
| 01: int pin_dvig=7, //Вывод для управления БКДПТ
02: pin_1_encoder=2, //пин для нулевого прерывателя по умолчанию на 2 цифровой вход 03: pin_2_encoder=4; //пин для второго сигнала энкодера на 4 цифровой вход 04: float x; //координаты ротора 05: float x0=0; //начальная координата ротора 06: float v0=0; //начальная скорость ротра 07: float v, //скорость ротора 08: d_time, //дельта t для дифференцирования 09: a, //ускорения ротра 10: k=0.18; //коэффициент коррекции подбирается экспериментально 11: int time1, //текущее время для х,v,a 12: time0, //начальное время для х,v,a 13 t_zapuska, //время запуска БКДПТ 14: t_raboti_LAD=200, //время работы ЮКДПТ 15: t_time, //текущее время для БКДПТ 16: d_t_raboti_LAD; //коррекция времени работы БКДПТ 17: boolean p_razr=true, //разрешение запуска 18: dvig_rab, //флаг запуска БКДПТ 19: flag=true; //флаг направления движения true <— false —> 20: void setup() { 21: Serial.begin(9600); 22: pinMode(pin_2_encoder,INPUT); //второй вход энкодера 23: pinMode(pin_dvig,OUTPUT); 24: attachInterrupt(0,x_koord, CHANGE); //инициализация нулевого прерывания 25: //x_koord определяет положения ротора 26: //точностью 0.141мм) 27: time0=millis(); } 28: void loop() { 29: t_time=millis(); //текущее время для БКДПТ 30: time1=millis(); //текущее время для х,v,a 31: if (p_razr==true) //если пуск разрешен { 32: pusk_LAD(); //запуск БКДПТ 33: p_razr=false; //запрет запуска 34: t_zapuska=millis(); //сохраняем время запуска } 35: if ((t_zapuska+t_raboti_LAD<t_time) or (x>20)) //если время запуска меньше текущего { 37: stop_LAD(); //остановка БКДПТ } 38: if (flag==true) // если движения <—— { 39: if (((v==0) and (x>0)) or ((v*v0<0) and (x>0))) //если меняется направление //движения 40: //(текущая скорость =0 41: //или произведение текущей //скорости и { 43: flag=false; //меняется направление движения 44: d_t_raboti_LAD=int(k*(15-x)); 45: t_raboti_LAD=t_raboti_LAD-d_t_raboti_LAD; //коррекция времени работы //БКДПТ 48: if (t_raboti_LAD>1000) {t_raboti_LAD=1000;} 49: if (t_raboti_LAD<0) {t_raboti_LAD=0;} } } 50: if (flag==false) // если движения ——> { 51: if (((v==0) and (x<0)) or ((v*v0<0) and (x<0)) ) //если меняется направление движения 53: //или произведение текущей скорости и 55: //или ротора достиг до отметки -0.015 //метр { 56: p_razr=true; //разрешаем запуск 57: flag=true; } } 58: d_time=(time1-time0); //дельта t для дифференцирования в мс 59: v=(x-x0)/d_time; //вычисление скорости в м/с 60: a=((v-v0)/d_time)*1000; //вычисление ускорения в м/(с*с) 61: time0=time1; 62: x0=x; 63: v0=v; //текущие параметры становятся начальными } 64: void x_koord() { 65: if ((digitalRead(pin_1_encoder)==1) and (digitalRead(pin_2_encoder)==1)) x=x+0.141; 66: if ((digitalRead(pin_1_encoder)==1) and (digitalRead(pin_2_encoder)==0)) x=x-0.141; } 67: void pusk_LAD() //ф-я запуска БКДПТ { 68: digitalWrite(pin_dvig,HIGH); 69: dvig_rab=true; } 70: void stop_LAD() //ф-я остановки БКДПТ { 71: digitalWrite(pin_dvig,LOW); 72: dvig_rab=false}; |
В начале программы идет объявление переменных (строка 1-19), с присвоением некоторым переменным начальных значений. В функции setup() (строка 20) реализуется следующие функции:
— происходит инициализация последовательного порта для обмена с персональным компьютером данными на скорости 9600 бод (строка 21);
— настройка цифрового порта 4 как вход для 2-го вывода энкодера (строка 22);
— настройка цифрового порта 7 как выход управления БКДПТ (строка 23);
— функция attachInterrupt(0,x_koord, CHANGE) инициализирует внешние прерывание программы, так называемой нулевое прерывание (первый параметр функции attachInterrupt), которое по умолчанию аппаратно реализуется через цифровой порт 2 (строка 24). Обработчик прерываний выполняется функции x_koord()(строка 64-66).
Каждый раз по сигналу датчика 1 (рисунок 2.9) прерывается выполнение основной программы и управление передается обработчику внешнего прерывания, где проверяется состояние другого датчика 2. В зависимости от состояния датчика 2 увеличивается или уменьшается координаты ротора.
Шаг изменения координаты определили экспериментально, на угол 100 градусов приходится 710 импульсов, т.е. шаг равен 0,141 градусам.
Время t_raboti_LAD (строка 14) работы БКДПТ в момент запуска равно 200 мс и в зависимости от нагрузки время коррекции определяется следующем образом ![]() d_t_raboti_LAD=int(k*(15-x)) (строка 44), где x текущие координаты ротора, k коэффициент пропорциональности равный 0,18. Время t_raboti_LAD работы БКДПТ увеличивается или уменьшается на величину d_t_raboti_LAD следующем образом t_raboti_LAD=t_raboti_LAD-d_t_raboti_LAD (строка 45), причем максимальное время работы БКДПТ не превышает 1000 мс, программная реализация которого выглядит следующим образом if (t_raboti_LAD>1000) {t_raboti_LAD=1000;}( строка 48). Коррекция времени работы БКДПТ происходит в момент остановки ротора мотор-колеса (строка 39). Программная реализация момента остановки ротора выглядит следующим образом if (((v==0) and (x>0)) or ((v*v0<0) and (x>0))) (строка 39)
d_t_raboti_LAD=int(k*(15-x)) (строка 44), где x текущие координаты ротора, k коэффициент пропорциональности равный 0,18. Время t_raboti_LAD работы БКДПТ увеличивается или уменьшается на величину d_t_raboti_LAD следующем образом t_raboti_LAD=t_raboti_LAD-d_t_raboti_LAD (строка 45), причем максимальное время работы БКДПТ не превышает 1000 мс, программная реализация которого выглядит следующим образом if (t_raboti_LAD>1000) {t_raboti_LAD=1000;}( строка 48). Коррекция времени работы БКДПТ происходит в момент остановки ротора мотор-колеса (строка 39). Программная реализация момента остановки ротора выглядит следующим образом if (((v==0) and (x>0)) or ((v*v0<0) and (x>0))) (строка 39) ![]() , т.е. в момент остановки скорость становиться равным нулю, но вследствие дискретизации координаты возможно, что последовательные значения скорости при изменении направления вращения ротора переходят с положительного значения в отрицательное значение. Поэтому используем универсальный метод представленный выше.
, т.е. в момент остановки скорость становиться равным нулю, но вследствие дискретизации координаты возможно, что последовательные значения скорости при изменении направления вращения ротора переходят с положительного значения в отрицательное значение. Поэтому используем универсальный метод представленный выше.
Благодаря высокой вычислительной мощности микроконтроллера Atmega328 программа управления БКДПТ выполняется менее чем за 10 мс, при этом подпрограмма обработки прерывания успевает выполнятся до 400 раз, что соответствует вращению ротора приблизительно на 0,56 градуса, (датчики Холла, расположены через каждый 3.6 электрических градуса) . Поэтому остается достаточно времени на обработку команд и выполнение в фоновом режиме управляющей программы.
Прямое вычисление угловой скорости, как приращение угла за период дискретизации сигнала при разрешении сигнала обратной связи 0,141 град, позволит вычислить за период квантования 10 мс наименьшую скорость 0,141 град / 10 мс = 0,014 град/с и наибольшую скорость 400*0,141 град / 10 мс = 5600 град/с, что явно достаточно для электорагрегата.
Как показано на рисунке 2.12, контроллер содержит силовые мосты для соответствующих фаз мотор-колеса. Каждый силовой каскад работает как широтно-импульсный модулятор с двумя выходными сигналами. Во избежании возникновения короткого замыкания в силовых каскадах поддерживается возможность управления задержкой момента включения с помощью драйвера двигателя для каждой пары силовых ключей.
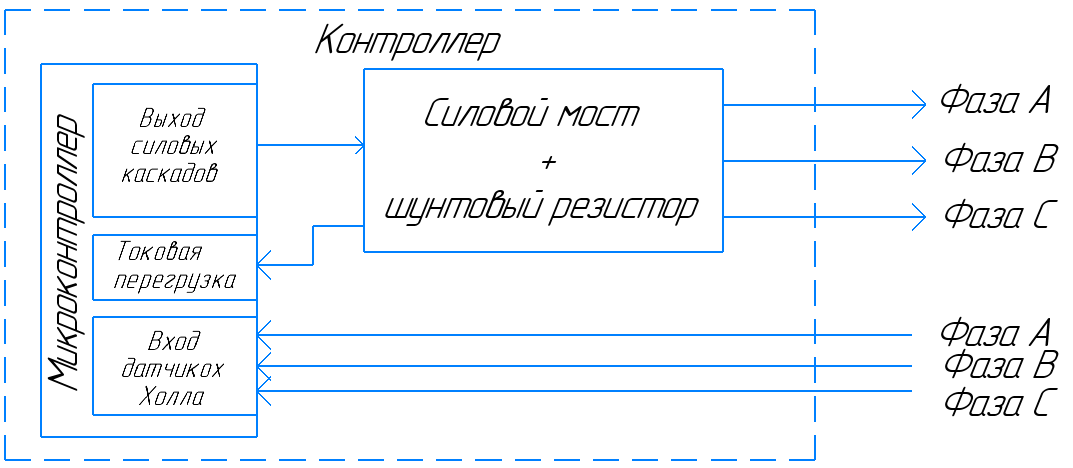
Рисунок 2.12 Схема подключения котроллера двигателя
Силовой мост, состоящих из 3 полумостов, управляется отдельным драйвером IR2101. Принципиальная схема моста составлена в программе DIP TRACE (рисунок 2.13).
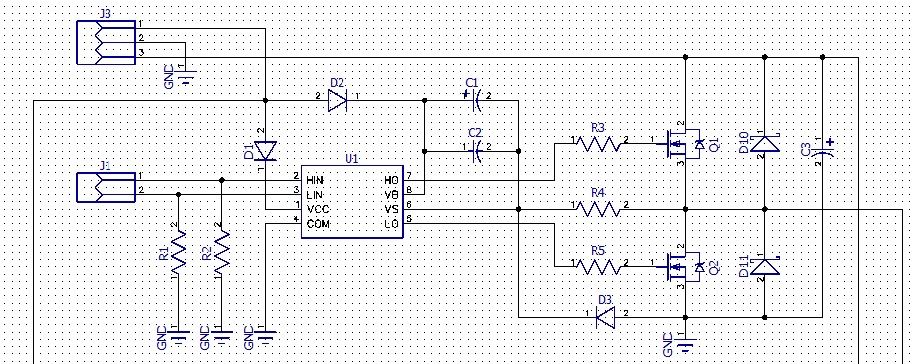
Рисунок 2.13 Принципиальная схема драйвера в программе DIP TRACE
Интерфейс внешнего управления реализован на языке C#, которое базируется на платформе Microsoft .NET Framework. Он обеспечивает лучшую наглядность и простоту моделирования объектно-ориентированных приложений. Программа позволяет эмулировать передачу текстовых команд по com-порту через Bluetooth. Созданное визуальное приложение оператор может использовать для прямого телеуправления, нажимая соответствующие кнопки.
Программа было написана в визуальной среде разработке Visual Studio 2018, которая раскрывает всю мощь платформы Microsoft .NET Framework. Согласно принципу объектно-ориентированного программирования, каждый объект был реализован в виде класса, а именно следующие классы:
— класс для работы с NMEA данными;
— класс Электроагрегат;
— класс Поле;
— класс Кривая;
— класс Связи;
— класс Массивов;
— класс Траектория.
Программа автоматически прокладывает оптимальный маршрут движения по полю, учитывая такие параметры, как габариты электроагрегата. Также, данная программа визуально отображает на дисплее траекторию, текущее положение электроагрегата, обрабатываемое поле с его границами. При определении траектории сначала выбирается наибольшая сторона поля, затем прокладываются параллельные ей линии маршрута с разворотами у противоположных краев поля. Таким образом, организуется рациональный маршрут движения электроагрегата по полю.
2.3 Математическая модель блока управления электроагрегата
Блок управления описывает работу Arduino контроллера, управляющего приводом колес электрагрегата. Данная модель описывает алгоритм управления БКДПТ, а также алгоритмы коррекции по времени работы БКДПТ. Предполагается, что современная электроника, применяемая для управления электроприводами, обладает высоким уровнем быстродействия и точности для решения поставленных задач. В связи с этим, запаздывания, вносимые вычислителем, при моделировании не учитываются. В цифровом электронном блоке осуществляется замыкание позиционной обратной связи привода, обеспечивающее следящий режим его работы и реализуются алгоритмы управления, обеспечивающие регулирование параметров выходного звена. В электронный блок условно перенесены передаточные коэффициенты электрических датчиков. В соответствии с перечисленными функциями модельный блок формирует управляющий сигнал на драйвера в зависимости от положения ротора его выходного звена. Уравнения, описывающие работу электронного блока управления, представлены ниже. Управление драйверами БКДПТ осуществляется исходя из следующего алгоритма:
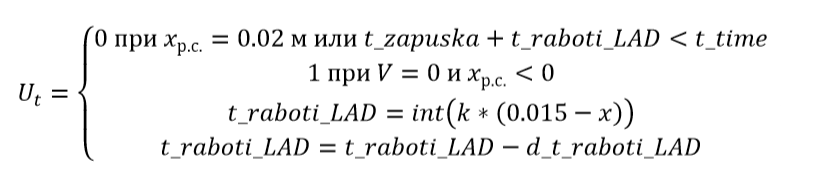
где Ut — управляющий сигнал на вход драйвера; t_zapuska — время запуска БКДПТ; t_raboti_LAD — время работы БКДПТ; d_t_raboti_LAD — коррекция времени работы БКДПТ. На рисунке 2.14 представлена модель блока управления электроприводом, в котором регулирование момента включения БКДПТ осуществляется в момент остановки ротора в противоположной точке.
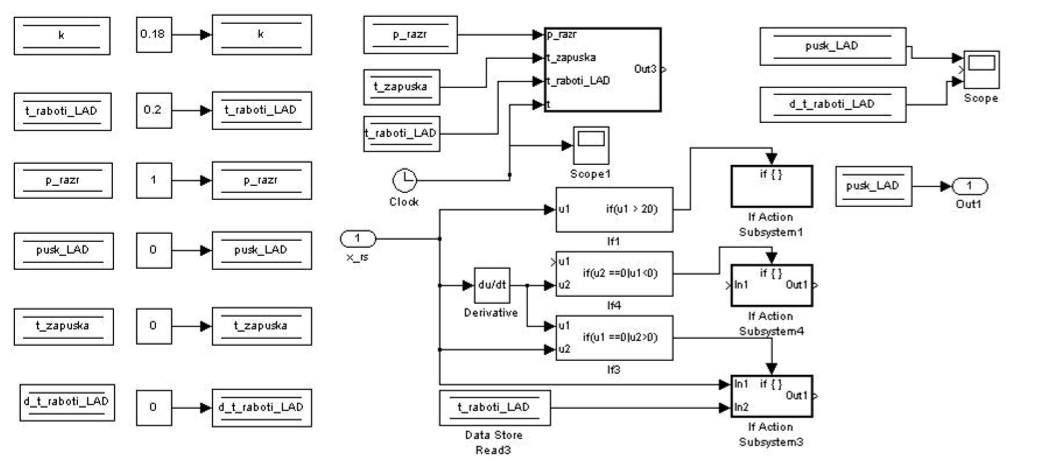
Рисунок 2.14 Модель блока управления двигателем
На рисунке 2.15 показан блок коррекции, реализующий коррекцию времени работы БКДПТ с целью улучшения динамических свойств привода при работе под нагрузкой.
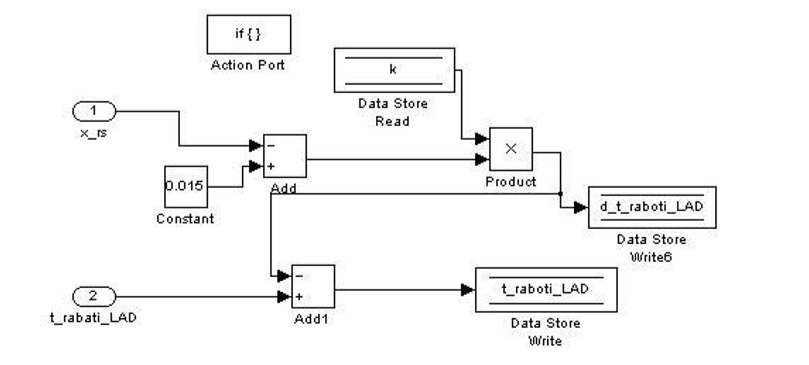
Рисунок 2.15 Блок коррекции времени работы БКДПТ
Блок управления двигателем осуществляет стандартную коммутацию обмоток БКДПТ, а также содержит усилитель управляющего сигнала (опторазвязка) и обратную связь по вращению ротора.
2.4 Модель системы управления БКДПТ в среде объектно-визуального моделирования Matlab (Simulink)
Для исследования работы привода колес электроагрегата была составлена его математическая модель, состоящая из функционально законченных блоков:
— БКДПТ в абсолютных единицах;
— модель мотор-колеса;
— блок системы управления.
Математическая модель описывает рабочие процессы БКДПТ на элементном уровне с использованием экспериментальных характеристик отдельных компонентов. Структура математической модели системы управления привода в среде Simulink математического пакета MATLAB [4] показана на рисунке 2.16. Блок БКДПТ имеет два входа (U_Su и U_Sv) — питания обмоток статора (проекция векторов напряжения на действительные и мнимые оси) и три выхода F — электромагнитная сила развиваемое двигателем и проекции токов на действительные и мнимые оси. Блоки Reshetni stan моделируют вращение ротора в зависимости от параметров, представленных на рисунке 16.
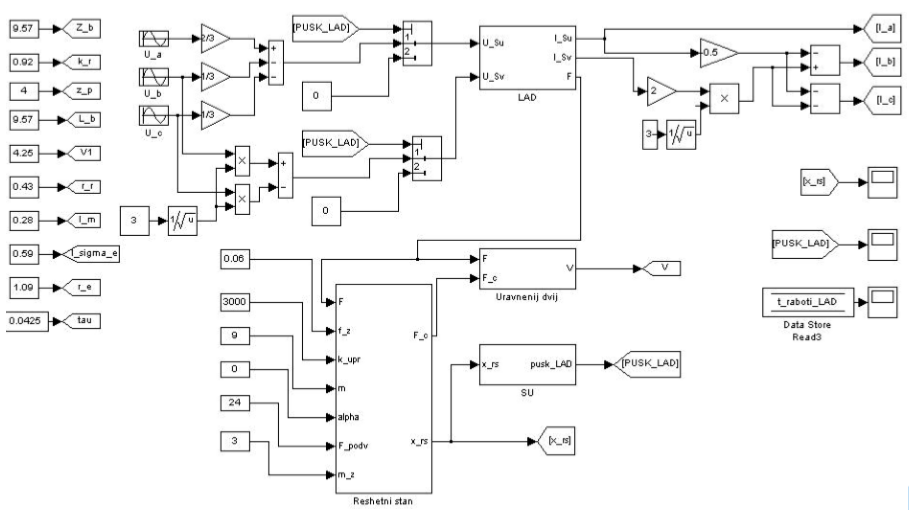
Рисунок 2.16 Математический модель привода колес электроагрегата
Блок SU (блок управления), учитывает положения ротора, и подбирает время включения и отключения двигателя от питания. На выходе блока SU появляется единичный сигнал в момент включения и нулевой сигнал в момент отключения двигателя, которое записывается в глобальную переменную pusk_LAD.
2.5 Исследование характеристик и рабочих процессов БКДПТ колес электроагрегата
Одной из целей работы является определение взаимосвязей между параметрами настройки блока управления электропривода колес и показателями рабочих процессов, а также улучшение динамических характеристик привода колес, при воздействии переменных нагрузок на ротор БКДПТ. Это является важным фактором при реализации управления привода электорагрегата [3]. Кроме того, при проектировании электроагрегата важна оценка энергетических свойств таких приводов.
В соответствии с параметрами экспериментальной установки электроагрегата на базе БКДПТ (раздел 2.1), проведено моделирование работы электропривода колес электроагрегата и построены следующие зависимости объекта управления:
— координаты ротора (рисунок 2.17);
— интервал времени работы БКДПТ (рисунок 2.18);
— момент включения и выключения БКДПТ (рисунок 2.19);
— фазные токи БКДПТ (рисунок 2.20).
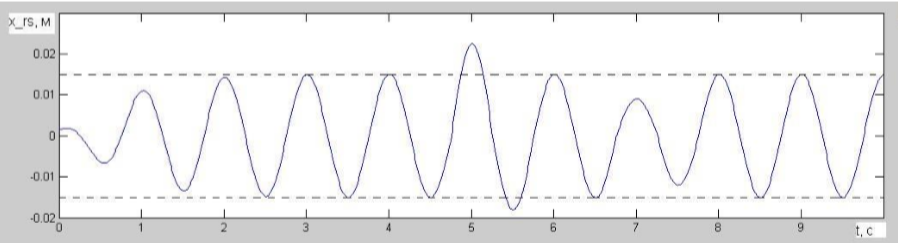
Рисунок 2.17 Зависимость координаты ротора от времени
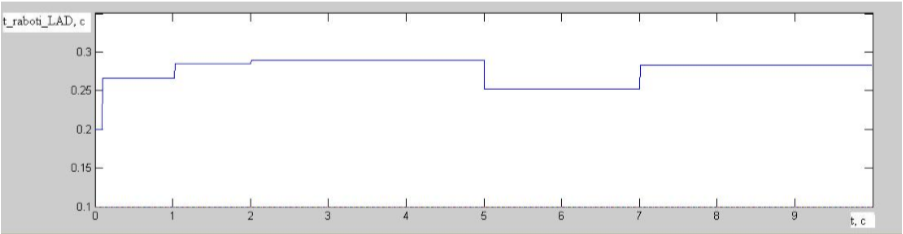
Рисунок 2.18 Интервал времени работы БКДПТ
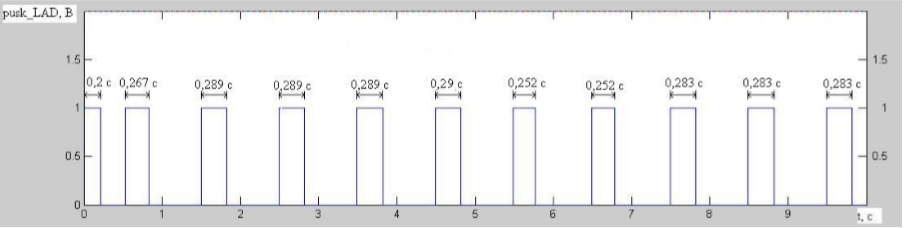
Рисунок 2.19 Момент включения и выключения БКДПТ
Как видно из рисунка 2.18 длительность работы БКДПТ напрямую зависит от положения ротора в момент его остановки, при этом регулируется время импульсной работы БКДПТ в зависимости от нагрузки на роторе. Включение БКДПТ происходит непосредственно в момент изменения направления вращения ротора, которое невозможно реализовать с датчиками Холла. Следовательно, предложенный метод управления приводом колес на базе БКДПТ является предпочтительным.
Необходимо отметить тот факт, что БКДПТ в приводах практически всегда работают в пусковом режиме, который иллюстрирует график на рисунке 2.20. Это является недостатком в приводах с БКДПТ. Несмотря на этот недостаток, применение энкодерных датчиков в управлении работы БКДПТ позволяет оптимизировать время работы БКДПТ и момент включение обмоток БКДПТ.
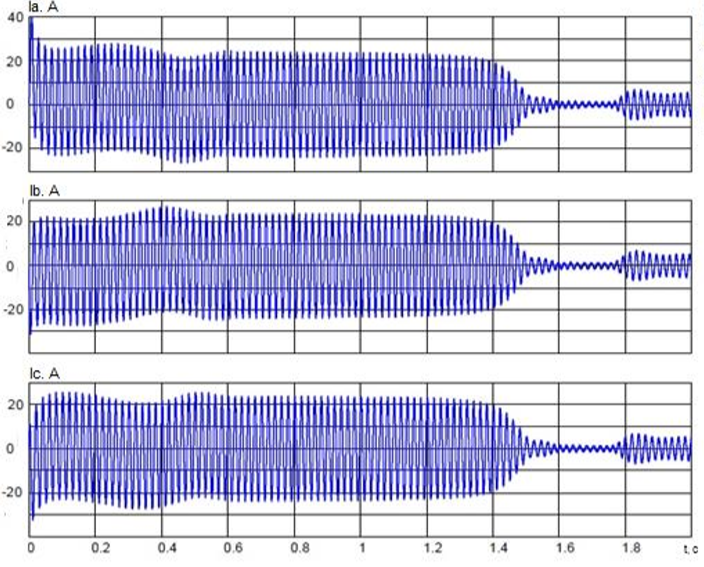
Рисунок 2.20 Фазные токи БКДПТ
2.6 Технология и основные параметры обработки сельскохозяйственных культур холодным туманом
Одним из наиболее распространенных способов внесения жидких препаратов сегодня является полнообъемное опрыскивание. Такой способ внесения можно отнести к наиболее консервативным и наименее производительным способом сплошного опрыскивания. Основной его недостаток – низкая производительность агрегатов, высокие эксплуатационные затраты (из которых самыми значительными являются расходы на ГСМ и на техническое обслуживание техники) и загрязнение почвы препаратами, которые стекают с растений в результате излишнего смачивания последних. Для рациональной обработки предлагается вносить жидкие химикаты холодным туманом, который генерируется ультразвуковым генератором.
Применение ультразвукового генератора для обработки холодным туманом имеет следующие преимущества:
- упрощение процесса приготовления рабочей жидкости и связанное с этим снижение количества техники, задействованной на опрыскивании;
- увеличение эффективности машин по сравнению с малообъемным опрыскиванием за счет повышения коэффициента обработки растений;
- повышение качества обработки и снижение потерь препарата за счет применения ультразвукового генератора, обеспечивающего распыл, близкий к монодисперсному.
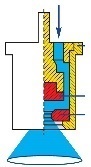
Принцип работы генератора холодного тумана выглядит следующим образом: воздух нагнетается при помощи двух вихревых вентиляторов внутрь емкости с жидкостью для обработки; ультразвуковой генератор генерирует холодный туман из жидкости для обработки; под воздействием вихревых потоков холодный туман посредством магистралей попадает в непосредственную зону обработки к растению (рисунок 2.21).
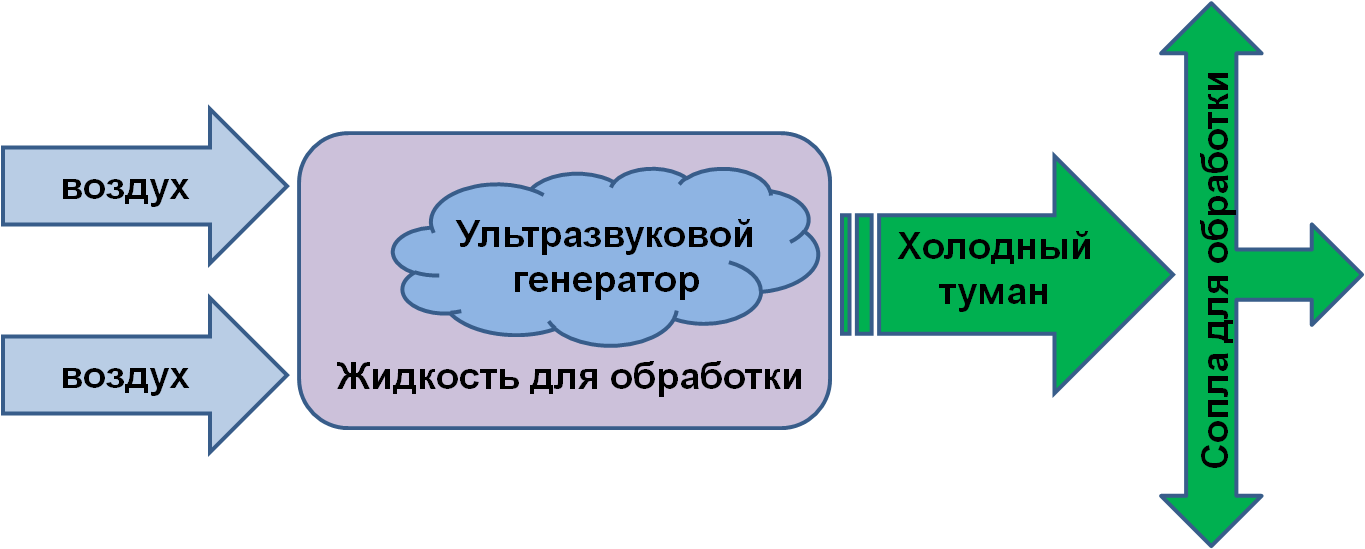
Рисунок 2.21 Структурная схема генерации холодного тумана
для обработки растений
При составлении раствора рабочей жидкости при такой технологии обработки требуется меньшее количество воды, по сравнению с традиционной обработкой, а количество препарата остается таким же, как рекомендует изготовитель.
Вода исполняет функцию инертного разбавителя, носителя применяемых препаратов независимо от того, в каком виде они наносятся на растения (суспензия, эмульсия, раствор). Выполнив свою роль, вода испаряется.
Доказано, что на эффективность обработки влияет не размеры капель, а количество вещества на единицу площади.
Процесс внесения жидких препаратов ультразвуковым генератором холодного тумана посредством БПЭА представлен на рисунке 2.22.

Рисунок 2.22 Внесение ЖМУ посредством холодного тумана
беспилотным электроагрегатом
Применение беспилотного электроагрегата, способного выполнять обработку холодным туманом, позволит снизить эксплуатационные затраты, связанные с расходами на ГСМ, уменьшить себестоимость продукции (меньший расход химикатов и удобрений, равномерное внесение по всей площади обработки), увеличить производительность труда (возможность работы в ночное время, а так же в условиях плохой видимости), повысить экологические показатели процесса (отсутствие выхлопных газов), что в свою очередь отразиться на экологичности продукции растениеводства.
3 ПРОВЕДЕНИЕ ПОЛЕВЫХ ИСПЫТАНИЙ
3.1 Подготовительный этап
3.1.1 Место проведения полевых испытаний
Испытания проводились в период с 7 по 21 сентября 2019 г. на полях крестьянского (фермерского) хозяйства Исламгулова Ирека Рафаэловича, расположенного в Республике Башкортостан, Кармаскалинский район.
Основными видами деятельности данного КФХ является:
– Выращивание зернобобовых культур (более 160 Га);
– Выращивание сахарной свеклы (более 100 Га);
– Разведение молочного крупного рогатого скота(более 40 голов КРС).
Данное хозяйство является передовым по производственно-экономическим показателям, использует прогрессивные технологии, имеет высококвалифицированные кадры и достаточно развитую материально-техническую базу. Причина этого заключается в широком использование современной техники, сельскохозяйственной науки, в прогрессивных ресурсосберегающих, экологически безопасных технологиях и передовом опыте, в высокой культуре производства, отвечающей требованиям современной научной организации труда и управления.
На базе крестьянского (фермерского) хозяйства проводятся научные исследования по совершенствованию систем земледелия, разработке ресурсосберегающих технологий возделывания пропашных культур и другим актуальным вопросам земледелия, агрохимии, растениеводства, защиты растений, экономики, механизации, ресурсосбережения.
Крестьянское (фермерское) хозяйство Исламгулова И. Р. в своей деятельности осуществляют сбалансированные стратегии двух экономических процессов:
создание и развитие эффективного агробизнеса;
создание условий для устойчивого развития сельских территорий.
3.1.2 Сборка беспилотного электроагрегата
Беспилотный электроагрегат (БПЭА) для обработки пропашных культур сконструирован таким образом, чтобы занимать как можно меньше пространства при транспортировке. Габариты беспилотного электроагрегата позволяют перевозить его в стандартном прицепе легкого автомобиля либо в кузове небольшого пикапа.
Электроагрегат спроектирован по принципу модульной (сборно-разборной) конструкции состоящей из 4 блоков (рисунок 3.1). Сборка/разборка электроагрегата осуществляется за 50 минут (таблица 3.1).
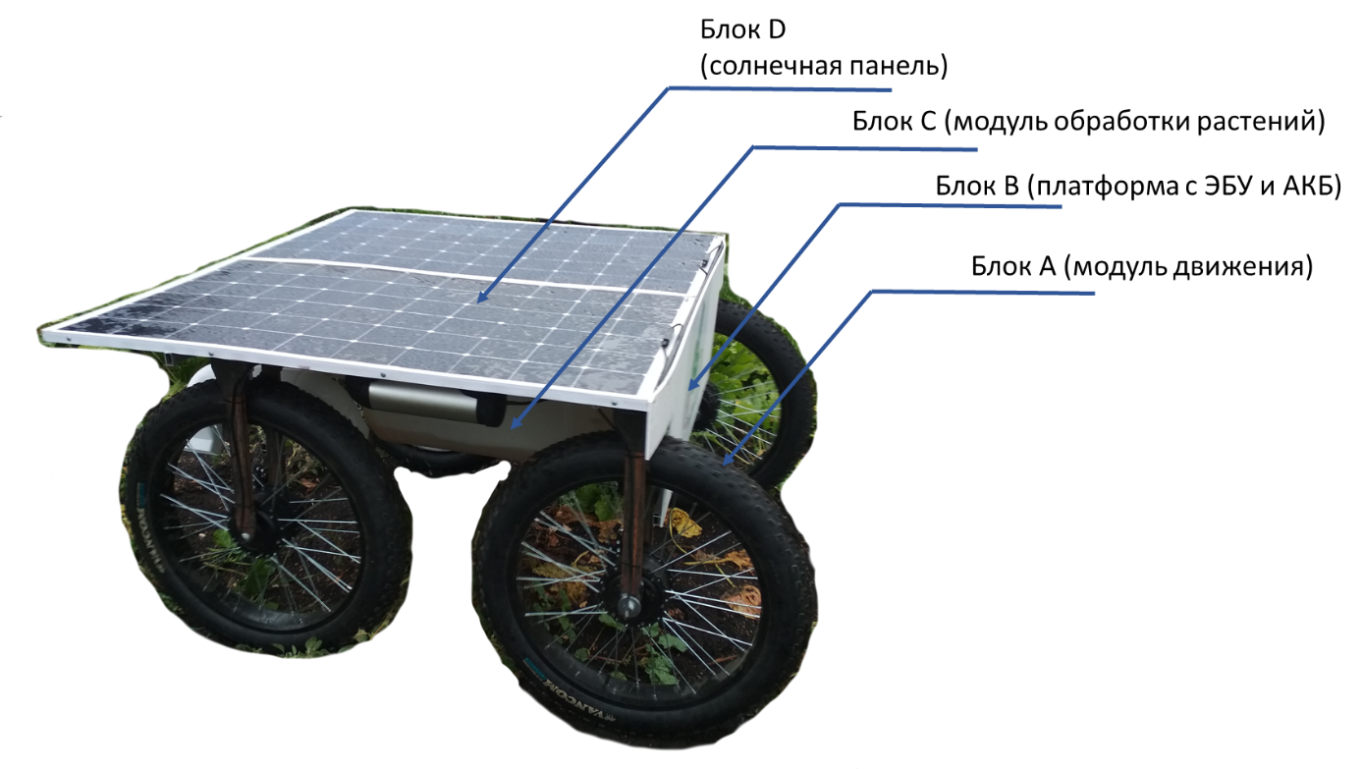
Рисунок 3.1 Быстросъемные блоки беспилотного электроагрегата
Таблица 3.1 Модули беспилотного электроагрегата
| № | Название модуля | Время, затраченное на сборку/разборку, мин |
| 1 | Блок А (модуль движения) | 20 |
| 2 | Блок В (модуль обработки растений) | 10 |
| 3 | Блок С (платформа с ЭБУ и АКБ) | 15 |
| 4 | Блок D (солнечная панель) | 5 |
| Итого | 50 | |
3.1.3 Отладка работоспособности системы
Сборка беспилотного электроагрегата занимает, как правило, не более 1 часа с использованием минимального набора инструментов. В дальнейшем требуется проверить работоспособность системы, а именно:
- Контакты и разъемы в местах соединения;
- Визуальный осмотр механических частей;
- Фиксацию датчиков и иного оборудования;
- Напряжение бортовой сети;
- Проверка датчиков;
- Количество и качество приема сигналов от спутников.
Затем производится настройка системы в меню планшета (Рисунок 3.2). В настройках необходимо указать размеры БПЭА, провести калибровку датчиков.
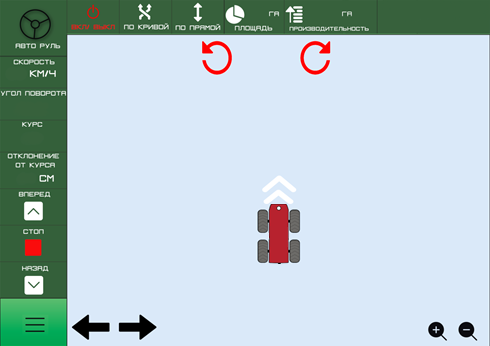
Рисунок 3.2 Интерфейс автоматической системы управления беспилотным электроагрегатом
После внесения всех необходимых данных в систему управления производится ее настройка, калибровка и проверка параметров.
Для автоматического управления системой необходимо вывести БПЭА на прямой или изогнутый ряд и нажать кнопку «Авторуль», и система приступит к автоматическому управлению и маневрированию. Если необходимо взять управление на себя, то достаточно нажать кнопку «Авторуль», и система перейдет в ручной режим.
После нескольких минут использования системы можно быть уверенным, что система адекватно управляет БПЭА и точно ведет его по выбранному маршруту. Таким образом, исключаются ошибки оператора, вызванные усталостью или невнимательностью.
3.2 Обучение управлению беспилотным электроагрегатом
3.2.1 Требования к оператору беспилотного электроагрегата
К оператору беспилотного электроагрегата предъявляются требования в соответствии Федеральных законов «О безопасности дорожного движения», «Об образовании» [9].
Оператор обязан:
- не допускать БПЭА на дороги общего пользования;
- следить за обстановкой во время движения БПЭА;
- незамедлительно среагировать в случаях опасности;
- выполнять контрольный осмотр БПЭА перед выездом и при выполнении поездки;
- заправлять БПЭА материалами и специальными жидкостями с соблюдением современных экологических требований;
- обеспечивать прием, размещение и перевозку грузов;
- уверенно действовать в нештатных ситуациях;
- принимать возможные меры для оказания доврачебной медицинской помощи пострадавшим при дорожно-транспортных происшествиях, соблюдать требования по их транспортировке;
- устранять возникшие во время эксплуатации БПЭА мелкие неисправности, не требующие разборки узлов и агрегатов, с соблюдением требований техники безопасности;
- своевременно обращаться к специалистам за устранением выявленных технических неисправностей;
- совершенствовать свои навыки управления БПЭА.
- соблюдать правила дорожного движения, основы законодательства в сфере дорожного движения;
- о влиянии алкоголя, медикаментов и наркотических веществ, а также состояния здоровья и усталости на безопасное управление БПЭА;
- перечень неисправностей и условий, при которых запрещается эксплуатация БПЭА или его дальнейшее движение;
- приемы и последовательность действий при оказании доврачебной медицинской помощи при дорожно-транспортных происшествиях;
- порядок выполнения контрольного осмотра БПЭА перед поездкой и работ по его техническому обслуживанию;
- правила техники безопасности при проверке технического состояния БПЭА, приемы устранения неисправностей и выполнения работ по техническому обслуживанию, правила обращения с эксплуатационными материалами.
3.2.2 Ознакомление с аппаратно-программным комплексом
Аппаратно-программный комплекс предназначен для автоматического вождения БПЭА и выполнения технологических сельскохозяйственных операций в автоматическом и ручном режимах. Комплекс способствует точно и без огрехов управлять БПЭА, при любой видимости – днем и ночью, в туман, при сильной запыленности. В результате применения данного комплекса сокращаются сроки и стоимость выполнения сельскохозяйственных работ.
Моноблок представляет собой электронный блок управления с современным сенсорным монитором в прочном компактном моноблочном форм-факторе (рисунок 3.3).

Рисунок 3.3 Внешний вид моноблока
Одним из преимуществ данной разработки является интуитивно понятное программное обеспечение (Рисунок 3.4). Функционал позволяет запись и обработку информации (запись границ поля, передача и сохранение данных, корректировку работы).
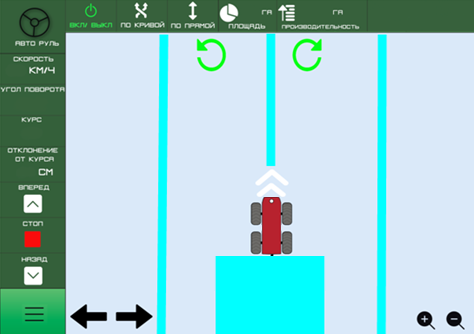
Рисунок 3.4 Интерфейс программного обеспечения
Интерфейс отображает набор необходимых данных, таких как:
- отклонение от курса

- обработанная площадь
- производительность
- скорость движения
- угол поворота колес
- поворот влево
- поворот вправо
- движение вперед
- движение назад
- СТОП…………………… …




Для расширения базовых функций моноблока возможно подключение следующих опций:
— подключение GSM/GPRS модема для передачи данных c прибора в режиме реального времени;
— активация режима RTK для работы с базовыми станциями.
Многофункциональный програмнный комплекс позволяет:
— параллельное вождение по курсоуказателю вдоль рядов в условиях любой видимости в ручном режиме
— автоматическое движение (беспилотное управление)
— управлять секциями опрыскивателей.
Технический потенциал навигационной системы:
— встроенный GPS-приемник;
— возможность приема поправок RTK (2–3 см);
— порты USB для загрузки обновлений и выгрузки данных;
— разъёмы карт памяти для загрузки обновлений и выгрузки данных;
— встроенная аккумуляторная батарея;
— возможность измерения площади по контуру;
— встроенный фильтр Gl1de.
ВОЗМОЖНОСТИ СИСТЕМЫ
☑Прием различных видов коррекционных сигналов GPS/ГЛОНАСС в том числе Novatelcorrect);
☑Точность 0-20 см (с коррекционным сигналом RTK 0-3 см);
☑Интуитивно понятное ПО;
☑Запись и обработка полученной информации;
☑Гироскопические датчики горизонта обеспечивают работу системы на неровных участках местности (холмы, спуски, подъемы);
☑Мониторинг результатов работы;
ОСНОВНЫЕ ПРЕИМУЩЕСТВА
• Отсутствие перекрытий, пропусков– равномерность обработки полей;
• Точное внесение удобрений и химикатов;
• Возможность работы в дневное и ночное время, а также в условиях плохой видимости;
• Снижение затрат на семена, удобрения, химикаты;
• Контроль качества операций и увеличение урожайности.
Программный комплекс беспилотного электроагрегата позволяет уменьшить расход химикатов и удобрений за счет равномерного внесения по всей площади обработки (дифференцированное внесение), увеличить производительность труда (возможность работы в ночное время, а также в условиях плохой видимости).
3.3 Практическое управление беспилотным электроагрегатом
3.3.1 В ручном режиме управления БПЭА
Ручной режим управления — все технологические операции обработки пропашных культур (посевов) управляются или осуществляются оператором дистанционно без использования заранее введенной программы. Все автоматические последовательности выполняются по команде оператора, которые он задает посредством кнопок, расположенных на дисплее моноблока.
Данный режим необходим при движении БПЭА по дорогам общего пользования, а также когда затруднено движение в автоматическом режиме.
В данном режиме реализованы следующие функции:
– Прокладка линий движения А В в качестве маркеров;
– Режим работы в качестве курсоуказателя;
– Отображение и запись данных;
Прямая AB – самая простая форма линии. Используйся прямая линия AB, когда нет необходимости определять поворотные полосы, и требуется вести БПЭА по параллельным прямым линиям. Для создания прямой линии АВ определяется стартовую точку (A) и конечную точку (B). Затем появляется прямая линия АВ, соединяющая две точки.
| Для создания курсовой линии АВ необходимо выбрать способ движения ПО ПРЯМОЙ |  |
| или же ПО КРИВОЙ, для движения по изогнутым контурам. |  |
Затем проехать по планируемой траектории движения, задав начальную (точка A) и конечную точки (точка B). Когда координаты точек А и В заданы, будет построена прямая линия, проходящая через них (рисунок 3.5). Так же можно наблюдать на дисплее положение БПЭА в поле, курсовую линию и расстояние смещения от нее. На дисплее оператор может узнать, на какую величину необходимо скорректировать свое положение.
Когда система начинает описывать линию, оператор определяет ширину захвата. Эта ширина используется для расчета расстояния между курсовыми линиями. Если требуется, чтобы курсовые линии были расположены в точном соответствии ширине, то можно задать наложение или пропуск.
Остальные линии будут построены параллельно курсовой линии АВ, тем самым можно будет осуществлять параллельное движение в режиме курсоуказателя.
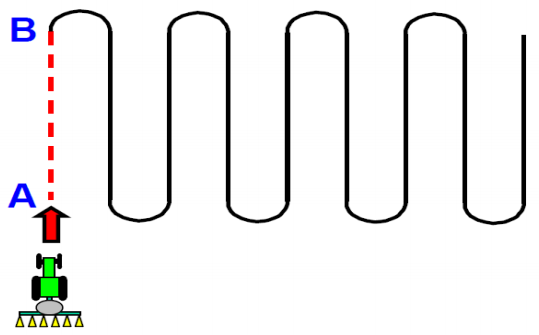
Рисунок 3.5 Пример построения курсовой линии АВ
Курсоуказатель показывает положение БПЭА на поле, линию направления и расстояние смещения от линии направления, так, что оператор может определить расстояние, необходимое для коррекции положения.
Визуализация отклонений показывает местоположение БПЭА относительно заданной линии направления. Если БПЭА меняет положение относительно линии направления, светодиоды смещаются влево или вправо (Таблица 3.2). Курсоуказатель необходим для получения точного направления и корректировки курса БПЭА и для обеспечения точного вождения по прямым линиям.
Возможность запоминать не только конечные и начальные точки ряда, но и любую кривую в качестве опорной линии, позволяет реализовать самые разные варианты обработки, в том числе режим «ПО КРИВОЙ».
Таблица 3.2 Визуализация отклонений БПЭА и его корректировка относительно заданной линии направления движения
| Отклонение от курса |  |
| Визуализация отклонений | |
| Поворот влево/вправо |   |
| Движение вперед |  |
| Движение назад |  |
| СТОП |  |
Ниже приведен пример выполнения работ в режиме вождения «по прямой» (рисунок 3.6). Программное обеспечение автоматически выполняет разбивку обрабатываемой площади на параллельные направляющие согласно заданной ширине обработки (ширина заданная пользователем в настройках программы). Система ориентируясь на первую линию между точками «А» и «В» выдаѐт пользователю визуальные подсказки в случае отклонения от правильной траектории движения, тем самым позволяет упростить работу.
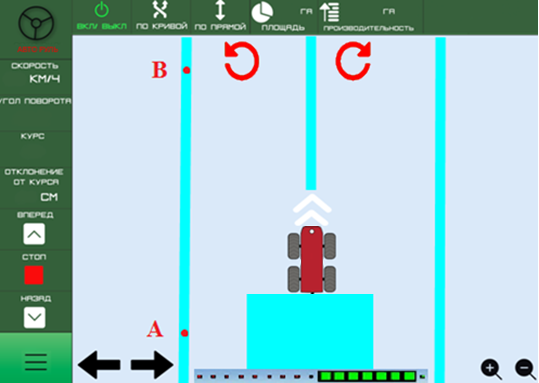
Рисунок 3.6 Пример выполнения работ в режиме вождения «ПО ПРЯМОЙ»
3.3.2 В автоматическом режиме управления БПЭА
Автоматический режим — режим работы, при котором оператор БПЭА дает только команду на начало процесса обработки, а все последующие технологические операции выполняются автоматически.
В данном режиме реализованы следующие функции:
– Прокладка линий движения А В в качестве маркеров;
– Режим работы в качестве автопилота;
– Отображение и запись данных.
| Для передачи управления системе оператору необходимо вывести БПЭА на прямой курс или |  |
| изогнутый путь (проделать все то же самое, что и в ручном режиме управления) и нажать кнопку, и система |  |
| приступит к автоматическому управлению и маневрированию. |  |
| Если оператору необходимо взять управление на себя, то достаточно нажать кнопку |  |
Ниже приведен пример выполнения работ в автоматическом режиме вождения (рисунок 3.7). Программное обеспечение автоматически выполняет разбивку обрабатываемой площади на параллельные направляющие согласно заданной ширине обработки (ширина обработки, заданная пользователем в настройках программы). Система, ориентируясь на первую линию между точками «А» и «В», продолжает параллельное им движение, тем самым происходит вождение в автоматическом режиме, БПЭА сам корректирует курс движения.
| Для разворота в конце загона нажать кнопку «разворот по часовой стрелке», |  |
| или «против часовой стрелки», и БПЭА сам осуществит разворот по выбронной траектории |  |
| Так же есть возможность увеличить масштаб либо |  |
| уменьшить, для более детального рассмотрения какой-либо области |  |
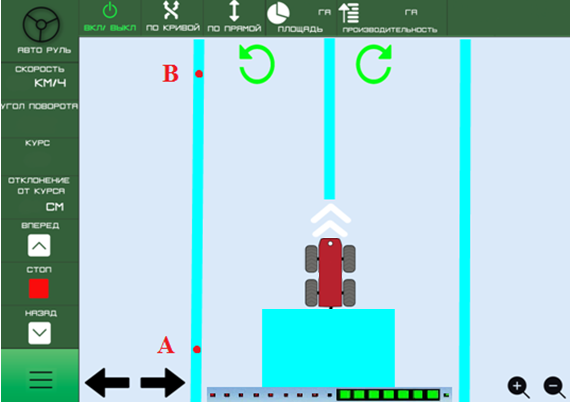
Рисунок 3.7 Пример выполнения работ в автоматическом режиме вождения
После нескольких минут использования системы в автоматическом режиме можно будет убедиться, что система адекватно управляет БПЭА и точно ведет его по выбранному маршруту. Таким образом, исключаются ошибки оператора, вызванные усталостью или невнимательностью.
3.4 Экспериментальные исследования БПЭА
3.4.1 Картографический обзор места проведения полевых испытаний
Одним из важных этапов для проведения полевых испытаний является подготовка цифровой картографической основы, что обеспечивает автоматизированное отображение пространственно-координированных данных по отдельным полям, а также реализацию оптимальных агротехнических решений.
При картографическом обеспечении точного земледелия использовалась космическая съемка. Космоснимки или материалы дистанционного зондирования получают с космических спутников. Они могут быть как платные, так и бесплатные. Платные заказываются в специальных организациях (например, в России поставщиком космоснимков является компания Сканекс и другие), указывается место съемки и разрешение. Съемки производятся такими спутниками как Landsat 7, SPOT 5 и т.д. Обрисовывать контура в этом случае можно не используя планы, так как изображение настолько четкое, что можно разглядеть дренажные каналы, элементы растительности, дороги, которые обычно являются границами полей, и точность при этом будет достаточно высокой (рисунок 3.8).

Рисунок 3.8 Космоснимок места проведения полевых испытаний (Яндекс карты)
После анализа полученных снимков можно реализовать различные агротехнические решения, в нашем случае определить идеальное начало и способ движения БПЭА на заданном участке поля.
3.4.2 Этапы проведения полевых испытаний
Испытания проводились на протяжении 15 дней на полях крестьянского (фермерского) хозяйства Исламгулова И. Р., расположенного в Республике Башкортостан, Кармаскалинский район.
Опыты выполнялись в несколько этапов (при различной влажности почвы), состоящих из нескольких режимов работы (таблица 3.3).
Таблица 3.3 Режимы работы и этапы проведения полевых испытаний
| № п/п | Режимы работы | Полевая влагоемкость, % | Состояние почвы |
| I этап | ручной | Менее 25 | Рассыпается, не скатывается в комок |
| автоматический | |||
| II этап | ручной | 25-50 | Скатывается в комок, но при броске рассыпается |
| автоматический | |||
| III этап | ручной | 50-75 | Скатывается в комок, но при броске не рассыпается |
| автоматический | |||
| IV этап | ручной | 75-100 | Скатывается в прочный комок и при сдавливании податлива, легко слипается |
| автоматический | |||
| V этап | ручной | Выше полевой влагоемкости | При сильном сжатии из комка почвы можно выжать немного воды |
| автоматический |
Благодаря такому подходу стало возможно объективно оценить работоспособность БПЭА. Сравнить различные способы управления БПЭА на разных участках поля, проверить теоретические и лабораторные исследования в полевых условиях, приближенных к естественной среде работы БПЭА на сельскохозяйственных работах (рисунки 3.9-3.11).



Рисунки 3.9-3.11 БПЭА на полевых испытаниях
Маршрут движения БПЭА отмечался сигнальной лентой (рисунок 3.12 – 3.13).

Рисунок 3.12 Фиксирование маршрута движения БПЭА по полю

Рисунок 3.13 Сигнальная лента вдоль движения БПЭА
В конце пройденного пути были произведены замеры отклонений от идеальной траектории движения БПЭА (рисунок 3.14).

Рисунок 3.14 Отклонение траектории движения БПЭА от заданной траектории
Таким образом были произведены все 5 этапов полевых испытаний. Осуществлены замеры при различных режимах движения БПЭА и влажности почвы. Полученные данные были проанализированы, сделаны выводы.
3.4.3 Результаты проведенных испытаний
Испытания проводились на протяжении 15 дней. С целью определения зависимости точности проходов в различных режимах работы от полевой влагоемкости почвы (рисунок 3.15). Было произведено 10 проходов при различной влажности почвы в различных режимах работы (таблица 3.4). Результаты проходов представлены в таблице 3.11
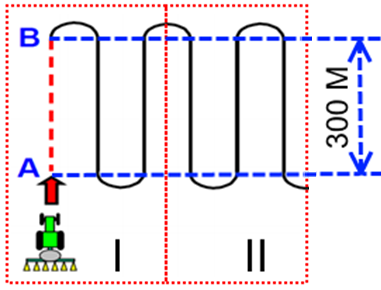
Рисунок 3.15 Схема движения БПЭА при проведении испытаний
(I– ручной режим, II–автоматический режим)
Таблица 3.4 Результаты проходов в различных режимах работы
| Полевая влагоемкость <25% | Ручной режим | |||||||||||
| Пройденное расстояние, м | 20 | 40 | 60 | 80 | 120 | 160 | 180 | 200 | 240 | 260 | 300 | |
| отклонение, см | 36 | 42 | 28 | 33 | 52 | 12 | 26 | 7 | 11 | 23 | 28 | |
| Автоматический режим | ||||||||||||
| Пройденное расстояние, м | 20 | 40 | 60 | 80 | 120 | 160 | 180 | 200 | 240 | 260 | 300 | |
| отклонение, см | 23 | 14 | 18 | 22 | 15 | 19 | 8 | 12 | 17 | 14 | 21 | |
| Полевая влагоемкость 25-50% | Ручной режим | |||||||||||
| Пройденное расстояние, м | 20 | 40 | 60 | 80 | 120 | 160 | 180 | 200 | 240 | 260 | 300 | |
| отклонение, см | 27 | 29 | 14 | 7 | 16 | 29 | 14 | 4 | 39 | 18 | 27 | |
| Автоматический режим | ||||||||||||
| Пройденное расстояние, м | 20 | 40 | 60 | 80 | 120 | 160 | 180 | 200 | 240 | 260 | 300 | |
| отклонение, см | 14 | 12 | 41 | 16 | 19 | 9 | 12 | 21 | 14 | 7 | 20 | |
| Полевая влагоемкость 50-75% | Ручной режим | |||||||||||
| Пройденное расстояние, м | 20 | 40 | 60 | 80 | 120 | 160 | 180 | 200 | 240 | 260 | 300 | |
| отклонение, см | 32 | 34 | 18 | 29 | 42 | 27 | 11 | 32 | 8 | 39 | 17 | |
| Автоматический режим | ||||||||||||
| Пройденное расстояние, м | 20 | 40 | 60 | 80 | 120 | 160 | 180 | 200 | 240 | 260 | 300 | |
| отклонение, см | 15 | 8 | 12 | 19 | 14 | 7 | 3 | 16 | 23 | 11 | 18 | |
| Полевая влагоемкость 75-100% | Ручной режим | |||||||||||
| Пройденное расстояние, м | 20 | 40 | 60 | 80 | 120 | 160 | 180 | 200 | 240 | 260 | 300 | |
| отклонение, см | 39 | 44 | 18 | 32 | 15 | 27 | 49 | 38 | 19 | 41 | 29 | |
| Автоматический режим | ||||||||||||
| Пройденное расстояние, м м | 20 | 40 | 60 | 80 | 120 | 160 | 180 | 200 | 240 | 260 | 300 | |
| отклонение, см | 19 | 6 | 14 | 9 | 17 | 21 | 26 | 11 | 31 | 9 | 5 | |
| Полевая влагоемкость >100% | Ручной режим | |||||||||||
| Пройденное расстояние, м | 20 | 40 | 60 | 80 | 120 | 160 | 180 | 200 | 240 | 260 | 300 | |
| отклонение, см | 29 | 42 | 47 | 34 | 31 | 49 | 54 | 19 | 36 | 25 | 41 | |
| Автоматический режим | ||||||||||||
| Пройденное расстояние, м м | 20 | 40 | 60 | 80 | 120 | 160 | 180 | 200 | 240 | 260 | 300 | |
| отклонение, см | 22 | 29 | 28 | 37 | 15 | 19 | 7 | 22 | 27 | 16 | 9 | |
3.4.4 Анализ полученных результатов
На рисунках 3.16-3.17 показаны отклонение траектории движения БПЭА при различных режимах управления на разных типах почв.
На рисунке 3.16 изображено отклонение движения БПЭА от траектории на длине гона 300 м в ручном режиме управления при различной полевой влагоемкости. Из графика видно, что наиболее сильное отклонение от траектории движения в ручном управлении происходит при полевой влагоемкости более 100% (При сильном сжатии из комка почвы можно выжать немного воды). Это обусловлено тем, что проходимость БПЭА в разы хуже, чем во время его движения на более сухой поверхности. Так же можно наблюдать стагнацию в управлении движением от заданного курса в зависимости от пройденного пути. Сказывается человеческий фактор, монотонная работа сильно утомляет оператора БПЭА, вследствие чего время реакции увеличивается, а внимание притупляется.
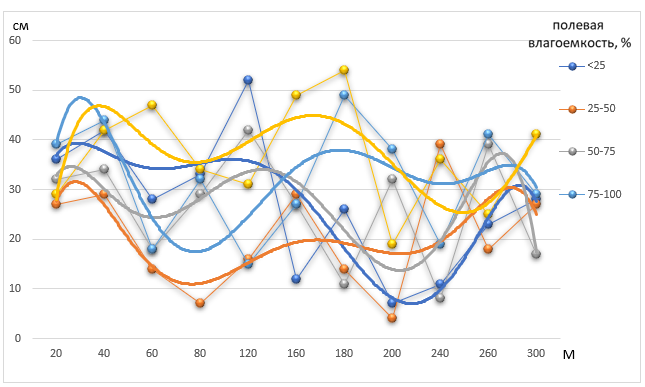
Рисунок 3.16 Отклонение движения БПЭА от заданной траектории движения в ручном режиме управления
На рисунке 3.17 представлен график отклонения движения БПЭА при автоматическом режиме управления, т.е. БПЭА осуществляет движение самостоятельно, без участия оператора, по сигналам GPS/ГЛОНАСС навигации. Из графика следует, что практически точность движения БПЭА по заданной траектории не меняется, за исключением движения при полевой влагоемкости более 100%. Налипание грунта на протектор колес затрудняет не только движение БПЭА, но и влияет на точность его движения.
Рисунок 3.17 Отклонение движения БПЭА от заданной траектории движения в автоматическом режиме управления
При проведении испытаний было выявлено, что наименьшее отклонение было достигнуто при автоматическом режиме управления. Наибольшее отклонение при движении БПЭА при полевой влагоемкости более 100% в ручном режиме управления. Результаты представлены в таблице 3.5 и на рисунке 3.18.
Таблица 3.5 Средние значения отклонений от траектории движения БПЭА в зависимости от режимов управления и полевой влагоемкости.
| Полевая влагоемкость, %
Режим управления |
<25 | 25-50 | 50-75 | 75-100 | >100 |
| ручной | 27 | 20 | 26 | 31 | 37 |
| автоматический | 16 | 15 | 15 | 16 | 21 |
| Среднее значение отклонений БПЭА от траектории движения, см | |||||
Рисунок 3.18 Среднее отклонение БПЭА от курса при различных режимах движения и полевой влагоемкости
Наиболее сильные отклонения от курса выявлены в ручном режиме управления (среднее отклонение 29 см). На точность вождения при таком режиме влияют множество факторов, что в свою очередь снижает четкость контроля над БПЭА. Наименьшие отклонения получились при движении БПЭА в автоматическом режиме (среднее отклонение 16 см). В независимости от полевой влагоемкости данный режим показал средние отклонения от заданного курса. Благодаря минимальному отклонению возможно уменьшить эксплуатационные затраты (на семена, удобрения, химикаты), снизить утомляемость оператора и увеличить производительность труда (возможность работы в дневное и ночное время, а также в условиях плохой видимости).
ЗАКЛЮЧЕНИЕ
Анализ существующих способов и автоматизированных технических средств обработки сельскохозяйственных культур показал, что их общим недостатком являются большие эксплуатационные затраты, из которых самыми значительными являются расходы на ГСМ и на обслуживание техники. Повышение эффективности внесения жидких удобрений и пестицидов можно добиться путем применения аэрозольной обработки, а именно, внесение жидких удобрений и пестицидов посредством холодного тумана.
С учетом выявленных недостатков, разработан беспилотный электороагрегат, который позволяет дифференцированно и автономно вносить жидкие удобрения посредством холодного тумана. Конструктивные параметры электроагрегата: габариты (длина/ширина/высота) — 1740/1500/950 мм; колесная база — 900 мм; масса без нагрузки — 140 кг; объем бака рабочей жидкости — 100 л.
Способность выполнять поставленные задачи беспилотным электроагрегатом с аппаратно-программным комплексом полностью исключает из технологического процесса машинно-тракторный агрегат с оператором. Технические характеристики беспилотного электроагрегата: запас хода — до 45 км; скорость движения агрегата — 5-15 км/ч; производительность генератора — 10 л/ч; время работы на одном заряде – до 5 ч.
Проведенные полевые испытания показали, что отклонения от курса БПЭА в режиме автоматического управления в среднем составляют 14 см (Протокол испытаний №4 от 09.09.2019). Данная точность является достаточной для внесения жидких удобрений и пестицидов.
Стоимость предложенного опытного образца составляет 600 тыс. руб., что в разы меньше ближайших известных аналогов. Экономический эффект от применения БПЭА с генератором холодного тумана достигается за счет отсутствия расходов на ГСМ и дифференцированного внесения жидких удобрений и пестицидов. Отсутствие выхлопных газов от БПЭА и стекание жидких удобрений и пестицидов с растений на почву позволяет получить более экологически чистый конечный продукт.
Стоимость предложенного опытного образца составляет 600 тыс. руб., что в разы меньше ближайших известных аналогов. Экономический эффект от применения беспилотного электроагрегата с генератором холодного тумана достигается за счет отсутствия расходов на ГСМ и дифференцированного внесения жидких удобрений и пестицидов.
Система была разработана на кафедре «Электрические машины и электрооборудование» Башкирского государственного аграрного университета, на которую получен патент Российской Федерации (№190594 от 04.06.2019).
По результатам научных и экспериментальных исследований опубликовано 8 публикаций, 2 из которых индексируемые в международных базах научного цитирования и 2 в журналах, включенных высшей аттестационной комиссией России в список изданий. Разработанный беспилотный электроагрегат с аппаратно программным комплексом автоматического вождения удостоен золотой медали международной агропромышленной выставки «Золотая осень» (октябрь 2019, Москва), а также дипломом 3 степени Российского энергетического форума «Энергетика Урала», (октябрь 2019, Уфа).
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
- Аипов Р.С. Направление интенсификации энергосбережения в АПК РБ // Международная научно-практическая конференция, посвященная 80-летию ФГОУ ВПО Башкирский ГАУ «Состояние, проблемы и перспективы развития АПК». – Уфа: БГАУ, 2010. – 119-120 с.
- Алексеев К.Б., Палагута К.А. Микроконтроллерное управление электроприводом: Учебное пособие. – М.:МГИУ,2008.- 298 с.
- Анучин А.С. Системы управления электроприводов: учебник для вузов. – М.: МЭИ, 2015. – 373 с.
- Артюшин А.А., Смирнов И.Г. Научно-техническое обеспечение применения ГЛОНАСС в сельскохозяйственном производстве // Сельскохозяйственные машины и технологии. – 2015. – № 1. – С. 8-11.
- Березовский, Е. Внедрение технологий точного земледелия: опыт Тимирязевской академии [Текст] / Е. Березовский, А. Захаренко, В. Полин // Аграрное обозрение. — 2009. — № 4. — С. 12- 17.
- Бычков, И.В. Внедрение геоинформационных технологий и навигационных систем в задачах точного земледелия [Текст] / И.В. Бычков, Н.Г. Луковников, Л.В. Нефедьев, Г.М. Ружников // Вестник НГУ. Серия: Информационные технологии. 2011. Том 9. – С. 22-30.
- Валекжанин, А.И. Повышение маневренности движения мобильных машин [Текст] / А.И. Валекжанин, В.И. // Вестник — АГАУ. Технологии и средства механизации сельского хозяйства. – 2009. – №1(51). – С. 52-55.
- Горин, Г.С. Разработка гибридной теории установившегося поворота машинно-тракторного агрегата (МТА). Динамика / Г.С. Горин, В.М. Головач, Я. Ю. Жгут // Агропанорама. – 2011. − № 1. – С. 8−13.
- Евстифеев А.В. Микроконтроллеры AVR семейств Tiny и Mega фирмы ATMEL, 2-е изд., стер. — М.: Издательский дом Додэка-ХХ1, 2005. — 560 с.
- Иванов-Смоленский, А. В. Электрические машины: учеб. для вузов / А. В. Иванов-Смоленский. – М.: Издательский дом МЭИ, 2006. – 652 с.
- Измайлов А.Ю. Артюшин А.А., Бисенов Г.С. Перспективы использования навигационных систем ГЛОНАСС/GPS при транспортном обеспечении сельскохозяйственных организаций // Сельскохозяйственные машины и технологии. – 2013. – № 2. – С. 16-20.
- Измайлов А.Ю., Фалеев А.П., Ксенофонтов Н.П. Автоматизированные системы управления для создания роботизированных технологий в растениеводстве // Модернизация сельскохозяйственного производства на базе инновационных машинных технологий и автоматизированных систем: Сб. докл. XII Междунар. науч.-практ. конф. Ч. 2. – М.: ВИМ, 2012. –С. 602-610.
- Иофинов, С.А. Эксплуатация машинно-тракторного парка / С.А. Иофинов. – М.: Колос, 1974. – 480 с.
- Косинский А.В., Матвеевский В.Р., Холомонов А.А. Аналого-цифровые преобразователи перемещений. – М.: Машиностроение, 1991. – 224 с.
- Личман Г.И., Марченко А.Н., Белых С.А. Размещение приемника сигналов ГЛОНАСС/GPS на агрегате // Сельскохозяйственные машины и технологии. – 2014. – № 1. – С. 7-9.
- Навигационные технологии в сельском хозяйстве. Координатное земледелие / В.И. Балабанов, С.В. Железова, Е.В. Березовский, А.И. – М.: Изд-во РГАУ – МСХА имени К.А. Тимирязева, 2013. –148 с.
- Омельченко Е. Я. Краткий обзор и перспективы применения микропроцессорной платформы Arduino / Е.Я. Омельченко, В.О. Танич, А.С. Маклаков, Е.А. Карякина // Электротехнические системы и комплексы. – Маг-нитогорск: ГОУ ВПО МГТУ, 2013. – Вып. 21. – C. 28-33.
- Ощепков А.Ю. Системы автоматического управления: теория применение моделирование в MATLAB. Издание третье, исправленное. Издательство Лань, М., 2013, 208 с.
- Павлюк, А.С. Моделирование движения шарнирно-соединенной колесной машины в матлаб-Симулинк [Текст] / А.С. Павлюк, В.И. Поддубный, А.И. Валекжанин // Вестник Алтайского государственного аграрного университета. – 2008. – № 8 (46). – С.66-71.
- Павлюк, А.С. Теоретические основы управляемого движения колесных машин [Текст]/А.С. Павлюк, В.И. Поддубный. – Алт. гос. техн. ун-т им. И. И. Ползунова. – Барнаул: 2010. – 239 с.
- Патент РФ на полезную модель № 183287 Исполнительное устройство для автоматического управления машинно-тракторным агрегатом./ Линенко А.В., Азнагулов А.И., Ямалетдинов М.М.; заявитель и патентообладатель ФГБОУ ВО «Башкирский ГАУ №2018114392; заявлен 18.04.2018; опубликован 17.09.2018, Бюл. №26
- Поддубный, В.И. Мехатронная модель колесного трактора для исследования устойчивости движения и управляемости [Текст] / В.И. Поддубный, A. Warkentin // Вестник КраГАУ.Техника. – 2008. – С.228 –232.
- Подруливающие устройства. [Электронный ресурс]. URL: http://агронавигация.рф/podrulivayushchie-devices/
- Радионов А.А. Электрооборудование и электроавтоматика М: Магнитогорск, 2011. — 126 с.
- Свид. 2018611772 Российская Федерация. Свидетельство об официальной регистрации программы для ЭВМ. Программа для системы управления рабочим органом технологических машин с линейным асинхронным двигателем на базе аппаратной платформы Arduino UNO / А.В.Линенко, Ш.Ф.Сираев, М.Ф.Туктаров; заявитель и правообладатель ФГОУ ВО Башкирский ГАУ (RU). – 2017662806; заявл. 08.12.2017; опубл. 06.02.2018, Реестр программ для ЭВМ. – 1 с.
- Система параллельного вождения Глонаш пилот [Электрон.] / http://www.labsolut.ru/products/sistema-parallelnogo-vojdeniya-glonash-pilot.html.
- Скойбеда А.Т. К исследованиям влияния схемы привода на поворотливость трактора и МТА / А. Т. Скойбеда, А. А. Шавель, В. М. Яцковский // Тракторы и сельхозмашины. – 1983. – № 6. – С. 9–11.
- Тарарыкин С. В., Пучков А. В., Тютиков В. В. Методы и средства параметрической оптимизации и настройки микропроцессорных систем управления. Вестн. ИГЭУ. 2001, № 1, с. 51-56.
- Топильский В.Б., Недопекин К.К. Цифровые преобразователи перемещений на фазовращателях //Электронная промышленность. – 1995 – № 4–5 – С. 151–153.
- Труфляк, Е.В. Системы параллельного вождения [Текст] / Е.В. Труфляк. – Краснодар: КубГАУ, 2016. – 72 с.
- Труханович, А.Л. Аппаратно-программный комплекс навигационного оборудования для точного земледелия [Текст] / А.Л. Труханович, П.В. Кучинский // Приборы и методы измерений. – Минск, 2012. — №2. – С.28-32.
- Фотоэлектрические преобразователи информации / Под ред. Л.Н.Преснухина. – М.: Машиностроение, 1974. – 376 с.
- Щеголихина, Т. А. Современные технологии и оборудование для систем точного земледелия: науч.-аналит. Обзор [Текст] / Т. А. Щеголихина, В. Я. Гольтяпин. – М.: ФГБНУ «Росин- формагротех», 2014. – 80 с.
- Leica mojo Mini2. Руководство по эксплуатации [Электрон.] / http://mojomini2.com/wp-content/uploads/Leica_mojoMINI2_UserManual_ru.pdf.
- Trimble для сельского хозяйства. Каталог продукции 2017 [Электрон.] / http://buelinginc.com/wp-content/uploads/files/Trimble Portfolio_2017_RUS.pdf.