
Титульный лист и исполнители
РЕФЕРАТ
Отчет 44стр., 1 таблиц, 22 рисунков, 18 источников.
Ключевые слова: беспилотный летательный аппарат, ортофотоплан, электронные карты, вегетационные индексы, дешифровка фотоснимков, оцифровка полей, цифровизация, умное поле.
Работа выполнена с целью: Изучить и апробировать использование беспилотного летательного аппарата в производственных условиях для мониторинга сельскохозяйственных угодий и состояния агроценозов.
Исследовательская работа включает научное обоснование и практическое использование беспилотного летательного аппарата при мониторинге сельскохозяйственных угодий. Особое внимание уделяется технологическому процессу практического применения беспилотного летательного аппарата, начиная от организационных моментов (получения разрешения на вылет), организации полета (формирование маршрута, высоты, дальности полета, фиксирование сельскохозяйственных угодий, их состояние) заканчивая дешифрированием фотоснимков, созданием электронных карт с географической привязкой к оси координат.
С использованием Геоскан 201 Агро обследовано 20286 га сельскохозяйственных угодий в Тюменской и Свердловской областях из них 206 полей площадью 5552 га. Создание электронных карт при пилотировании БПЛА является более точным методом, оперативным, в сравнении с использованием метода объезда и космического спутника. Позволяет получить географические координаты границ поля, рассчитать его площадь, сформировать ортофотопланы и электронный образ полей.
Беспилотник быстро и эффективно формирует нормализированные вегетационные индексы (NDVI)агроценозов для перехода на дифференцированную подкормку их минеральными удобрениями в режиме off-line с использованием систем спутниковой навигации.
Введение
Наукоёмкие технологии на основе использования систем спутниковой навигации требуют оперативности в получении информации о состоянии агроценозов. Необходимость новых подходов вызвана и концентрацией земель у крупных товаропроизводителей, размер которых даже в условиях Западной Сибири достигает 40-100 тыс. га пашни. Традиционные способы контроля за плодородием почвы, фитосанитарным состоянием посевов становятся малоэффективными для своевременного выполнения технологических операций.
Огромный потенциал в продвижении цифровых технологий заложен при использовании беспилотных летательных аппаратов (БПЛА). Уже на сегодняшний день имеются широкие возможности применения БПЛА для оцифровки полей, мониторинга за использованием сельскохозяйственных угодий и даже оперативного решения проблем в агроценозах локального характера.
Беспилотники могут работать в ручном, автоматическом и полуавтоматическом режимах. Ручной режим осуществляется с помощью дистанционного пульта в пределах оптической наблюдаемости или по видовой информации, поступающей с видеокамеры переднего обзора. Автономный полет летательного аппарата выполняется по заданной траектории, на заданнойвысоте, с заданной скоростью и со стабилизацией углов ориентации с помощью бортовых программных устройств. Полуавтоматическое управление означает автоматический полет без вмешательства человека с помощью автопилота по заданным параметрам, но оператор может корректировать маршрут в интерактивном режиме [1].
Сбор информации о состоянии агроценозов, сельскохозяйственных угодий с использованием БПЛА более доступно для товаропроизводителей АПК по сравнению с проведением дистанционного зондирования земли (ДЗЗ) космическими спутниками и воздушными пилотируемыми аппаратами. Беспилотники дают возможность съемки с небольших высот, вблизи объектов, в зоне чрезвычайных ситуаций без риска для жизни и здоровья пилотов. БПЛА позволяют получить оперативно снимки высокого разрешения и экономически более выгодны [2, 3].
Большой успех в аграрном секторе имеют беспилотные летательные аппараты США, Японии, Китая, Италии и др. Летательные аппараты самолетного типа зарубежных стран могут находиться в полете до 55 минут на высоте до 2000 метров с полезной нагрузкой до 1 кг при собственной массе 2.4 кг [4].
Беспилотные летательные аппараты конструкции отечественных ученых заслуживают внимание бизнессообщеста в аграрном секторе. Поэтому нами поставлена цель на первом этапе, разработать порядок (сформировать методику) практического использования беспилотного летательного аппарата при мониторинге сельскохозяйственных угодий.
Данная работа позволяет реально оценить использование сельскохозяйственных угодий, оперативно составлять и корректировать севообороты в рамках адаптивно-ландшафтных систем земледелия, разрабатывать ресурсосберегающие технологии возделывания сельскохозяйственных культур, держать под контролем фитосанитарное состояние посевов, формировать органам власти несвязанную поддержку на 1га пашни, регулировать арендные отношения между собственником земель и товаропроизводителем
Ключевые слова: оцифровка сельскохозяйственных угодий, полей; беспилотный летательный аппарат; искусственные спутники Земли; формирование ортофотопланов.
1. Условия, материалы и методы исследований
Разработка процесса пилотирования беспилотного летательного аппарата для мониторинга сельскохозяйственныхугодий и состояния агроценозов проводилась в производственных условиях на полях ОАО «Приозёрное» Тюменской области и СПК «Калининский» Свердловской области.
Беспилотный летательный аппарат применяли марки Геоскан 201 Агро. Длительность полета составляет до 3 часов при максимальной высоте полета 4000 метров и максимальной протяженности маршрута 210 километров с минимальной безопасной высотой полета 100 метров. Температура эксплуатации составляет от -20 до +40°С с максимально допустимой скоростью ветра 12 м/с. Площадь съемки за 1 полет при масштабе 3-10 см/пиксель составляет 7-22 км2 со скоростью 64-130 км/ч и максимально взлетной массе 8.5 килограммов.
Общая площадь обследованных сельскохозяйственных угодий составила 20028,6 га, из них 206 полей площадью 5552 га. На полях яровой пшеницы сорта Икар аэрофотосъемка проводилась в фазу кущения выхода в трубку культурных растений.
Составленные электронные карты полей (их контур, площадь, качество снимков) сравнивались с ранее оцифрованными картами методом объезда по предложенной нами методике с картами этих же полей полученные после дешифрования космоснимков.
При оцифровке полей использовалась программа QGIS (QuantumGIS), для дешифровки фотографий – программа AgisoftMetashapeProfessional, для построения цветовой гаммы и интерпретации в NDVI – программа Sputnik-Agro.
На опытно-производственных полях при посеве яровой пшеницы дифференцированно по элементарным участкам вносили КАС-32 в дозе 80-100 л/га с учетом содержания в почве нитратного азота и планируемой урожайности. В фазу кущения-выхода в трубку культурных растений проводилась подкормка КАС-32 в баковой смеси с гербицидами 7 л/га.
2. Научно-методическая база (порядок) применения беспилотного летательного аппарата для мониторинга сельскохозяйственных угодий
На сегодняшний день применение БПЛА в сельском хозяйстве начинает бурно развиваться и вопрос о внедрении в производство этих технологийстановится актуальным. Современное техническое обеспечение, такое какспектральные камеры, делают беспилотные технологии более информативными и значительно расширяют их спектр применения [1].
С помощью БПЛА в сельском хозяйстве могут решаться следующиезадачи: создание электронных карт полей, (построение 3D модели полей);инвентаризация сельхозугодий; оценка объема работ и контроль ихвыполнения, с целью оптимального построения систем ирригации имелиорации; оперативный мониторинг состояния посевов (БПЛАпозволяет быстро и эффективно строить карты по всходам культур); отслеживатьнормализованный вегетационный индекс NDVI(NormalizedDifferenceVegetationIndex), с целью эффективного внесенияудобрений; оценивать всхожесть сельскохозяйственных культур;прогнозировать урожайность сельскохозяйственных культур;осуществлять экологический мониторинг сельскохозяйственных земель,охрану сельхозугодий, опрыскивание посевов химическими препаратамидля борьбы с вредителями и болезнями; оценивать химический составпочвы [8].
2.1. Технические параметры БПЛА Геоскан 201
Геоскан 201 — многофункциональное беспилотное воздушное средство, разработанное российской компанией «Геоскан»(Рис 1).
Российский многоцелевой беспилотный летательный аппарат модели Геоскан 201 разрабатывался российскими конструкторами на базе беспилотного воздушного средства модели Геоскан 101, при этом, несмотря на явное сходство, оба дрона отличаются друг от друга, причём как техническими, так и эксплуатационными характеристиками. Данное устройство может применяться для различного рода целей, включая проведение геологической, геодезической и картографической разведки местности, аэросъёмку и аэрофотографирование местности, выполнение патрульных и наблюдательных, мониторинговых миссий, в сельском хозяйстве и пр. [7]

Рисунок 1 — БПЛА Геоскан 201 Агро
«Геоскан 201» — это аэрофотосъемочный комплекс, включающий в себя беспилотное воздушноесудно (БВС) типа «летающее крыло», пусковую установку и наземную станцию управления(Табл 1).
Назначение: Аэрофотосъемочный комплекс «Геоскан 201» предназначен для получения геопривязанных фотографий отдельных объектов, площадной и линейной аэрофотосъёмки.
Область применения:
Полученные с использованием комплекса материалы могут использоваться для:
• создания ортофотопланов масштаба 1:500 — 1:2000;
• трехмерного моделирования участка местности;
• создания карт высот местности;
• вычисления объемов пород в карьерах и насыпных объектах;
• обследования состояния объектов инфраструктуры, дорожного полотна;
• инвентаризации лесов и посевов;
• оценки ущерба и планирования аварийно-спасательных работ; при ЧС, таких как наводнения, оползни и пожары.
Таблица 1 — Технические характеристики Геоскан 201
| Тип БВС | летающее крыло |
| Скорость полета (воздушная) | 64-130 км/ч |
| Максимальная взлетная масса | 8,5 кг |
| Максимальная масса полезной нагрузки | 1,5 кг |
| Площадь фотосъёмки за один полёт | 7-22 км² |
| Допустимая скорость ветра | 12 м/с |
| Размах крыла | 2,22 м |
| Минимальная безопасная высота полёта | 100 м |
| Максимальная высота полёта | 4000 м |
| Двигатель | электрический, бесколлекторный |
| Аккумуляторная батарея | LiPo 5S AP 1370170 |
| Время подготовки к взлёту | 10 мин |
| Продолжительность полёта | До 180 мин |
| Максимальная протяженность маршрута | 210 км |
| Взлёт | С пусковой установки |
| Посадка | на парашюте, в автоматическом режиме |
| Рабочий диапазон температур: | |
| С АКБ стандарт | От -20 до +40 °С |
Аэрофотосъемочный комплекс не предназначен для полетов во время дождя, снега и прочих атмосферных осадков.
Комплекс не способен выполнять полеты ниже высоты точки старта.
В горной местности старт необходимо осуществлять в низшей точке, чтобы весь маршрут лежалвыше точки старта [6].
2.2. Разрешительная система использования БПЛА
Беспилотные летательные аппараты с сентября 2019 года подлежат обязательной регистрации в Росавиации. Кроме того, перед каждым использованием устройства необходимо получить ряд разрешений и согласований.
2.3. Регистрация БПЛА в Росавиации
БПЛА с максимальной взлетной массой от 250 граммов до 30 килограммов регистрируют по упрощенным правилам: требуется заявление от владельца и фотография устройства.
Правила учета беспилотных гражданских воздушных судов с максимальной взлетной массой от 0,25 килограмма до 30 килограммов , ввезенных в Российскую Федерацию или произведенных в Российской Федерации, утверждены постановлением Правительства Российской Федерации от 25.05.2019 № 658, которое вступило в силу по истечении 120 дней со дня его опубликования –27.09.2019.
Для постановки беспилотного воздушного судна на учёт владелец беспилотного воздушного судна представляет в Федеральное агентство воздушного транспорта заявление о постановке беспилотного воздушного судна на учёт с приложением фотографий этого беспилотного воздушного судна, содержащие следующие сведения:
а) информацию о беспилотном воздушном судне и его технических характеристиках:
— тип беспилотного воздушного судна (наименование, присвоенное изготовителем);
— серийный (идентификационный) номер беспилотного воздушного судна (при наличии);
— количество установленных на беспилотном воздушном судне двигателей и их вид (электрический двигатель, газотурбинный двигатель, двигатель внутреннего сгорания);
— максимальная взлетная масса беспилотного воздушного судна;
б) информацию об изготовителе беспилотного воздушного судна:
для юридического лица — наименование;
в) сведение о владельце беспилотного воздушного судна:
номер телефона (телефакса), адрес электронной почты;
для юридического лица — полное наименование, основной государственный номер, идентификационный номер налогоплательщика, адрес;
для индивидуального предпринимателя — фамилия, имя, отчество (при наличии), основной государственный регистрационный номер записи о государственной регистрации индивидуального предпринимателя, идентификационный номер налогоплательщика, адрес места жительства.
Заявление о постановке беспилотного воздушного судна на учёт представляется в Федеральное агентство воздушного транспорта в следующие сроки:
а) в случае приобретения беспилотного воздушного судна на территории Российской Федерации — в течение 10 рабочих дней со дня приобретения;
б) в случае ввоза беспилотного воздушного судна в Российскую Федерацию — в течение 10 рабочих дней со дня ввоза.
В соответствии с пунктом 13 Правил учета БВС для постановки БВС на учет,владелец БВС представляет ЗАЯВЛЕНИЕ О ПОСТАНОВКЕ БВС НА УЧЕТ с приложением фотографии этого БВС.
Заявление о постановке беспилотного воздушного судна (БВС) на учёт представляется в Федеральное агентство воздушного транспорта посредством направления почтового отправления или в форме электронного документа с использованием федеральной государственной информационной системы «Единый портал государственных услуг) по электронному адресу в информационно-телекоммуникационной сети «интернет» или портала учёта беспилотных воздушных судов [14].
2.2.2. Разрешение на использование воздушного пространства.
Порядок использования воздушного пространства Российской Федерации, в том числе и беспилотными воздушными судами, установлен Федеральными правилами использования воздушного пространства Российской Федерации, утвержденными постановлением Правительства Российской Федерации от 11.03.2010 № 138 [15].
Структура воздушного пространства включает в себя следующие элементы:
а) зоны и районы (зоны и районы Единой системы, районы полетной информации, диспетчерские районы, диспетчерские зоны);
б) маршруты обслуживания воздушного движения;
в) районы аэродромов (аэроузлов, вертодромов);
г) специальные зоны (зоны отработки техники пилотирования, пилотажные зоны, зоны испытательных полетов, зоны полетов воздушных судов на малых и предельно малых высотах, зоны полетов воздушных судов на скоростях, превышающих скорость звука, полетов воздушных судов на дозаправку топливом в воздухе, полетов воздушных судов с переменным профилем и т.д.);
д) маршруты полетов воздушных судов;
е) запретные зоны;
ж) опасные зоны;
з) зоны ограничения полетов;
и) другие элементы, устанавливаемые для осуществления деятельности в воздушном пространстве.
Границы элементов структуры воздушного пространства устанавливаются по географическим координатам и высотам. Границы и условия использования элементов структуры воздушного пространства публикуются в документах аэронавигационной информации [15].
Разрешение на использование воздушного пространства (ИВП) выдают в Главном или зональном центре Единой системы организации воздушного движения (ЕС ОрВД). Срок подготовки документов – пять дней или три дня соответственно. Заявление на ИВП должно содержать следующие данные:
— дату полета;
— тип беспилотника;
— границы района полета (координаты с указанием градусов, минут, секунд);
— высоту полета;
— время полета (по стандарту UTC);
— номер разрешительного документа от органа местного самоуправления или исполнительной власти.
Если полет проводит юридическое лицо, то заявление надо подать на бланке организации.
Документы можно представить по авиационной наземной сети передачи данных или на бумажном носителе (в том числе по факсу).
В полученном в ответ разрешении будет указан номер временного или местного режима ИВП [16].
Представления на установление временного и местного режимов подаются пользователями воздушного пространства в соответствии с Инструкцией по разработке, установлению, введению и снятию временного и местного режимов, а также кратковременных ограничений, утвержденной приказом Минтранса России от 27.06.2011 № 171 .
В представлениях указывается достоверная и полная информация о планируемой деятельности по использованию воздушного пространства.
Разработка временного режима главным центром Единой системы или местного режима зональным и региональным центрами Единой системы начинается с получения представления от пользователя воздушного пространства, которое содержит следующую информацию:
а) дата проведения мероприятия (не более трех основных и трех резервных дней) и вид деятельности;
б) при установлении временного или местного режимов для района проведения мероприятия:
границы района, обозначаемые в системе географических координат (градусы, минуты, секунды), и диапазон используемых высот (метры);
время начала и окончания мероприятия (всемирное координированное время);
предлагаемые эшелоны для полетов воздушных судов по маршрутам обслуживания воздушного движения и в районах гражданских аэродромов, находящихся в границах района проведения мероприятия;
предлагаемые ограничения в районах гражданских аэродромов (в случае, если деятельность по использованию воздушного пространства осуществляется в районе гражданского аэродрома на высотах от поверхности земли (воды) до эшелона 3050 м включительно в радиусах от контрольной точки аэродрома:
30 км — для аэродрома при внутренних полетах по расписанию,
50 км — для аэродрома, открытого для международных полетов);
резервный эшелон для обеспечения безопасности полетов в особых случаях при проведении мероприятия;
в) при установлении временного или местного режимов для обеспечения полетов воздушных судов по маршруту (маршрутам):
маршрут полета (маршруты полетов) воздушных судов шириной, установленной пунктом 28 Федеральных правил, с указанием пунктов маршрута в системе географических координат (градусы, минуты, секунды) для каждого из его участков, которые по своей длине эквивалентны участкам с полетным временем не более 25 минут;
г) разрешения на использование воздушного пространства запретных зон и зон ограничения, полученные в соответствии с Федеральными правилами;
д) данные о воздушных судах и аэродромах (вертодромах, посадочных площадках), с (на) которых разрешается их взлет (посадка) при проведении мероприятия;
е) порядок обслуживания воздушного движения (управления полетами) воздушных судов, участвующих в мероприятии, с указанием географического месторасположения пунктов управления, частот воздушной радиосвязи и порядка установления связи с ними;
ж) фамилия, имя, отчество, должность руководителя мероприятия и способ связи с ним;
з) фамилия, инициалы, должность лица, разработавшего представление на установление режима, и способ связи с ним [17].
Федеральными правилами использования воздушного пространства Российской Федерации установлен разрешительный порядок использования беспилотниками воздушного пространства, который предусматривает сообщение владельцами БПЛА в оперативные органы (центры) Единой системы организации воздушного движения Российской Федерации (далее — ЕС ОрВД) о плане полета беспилотного летательного аппарата и получение разрешения на использование воздушного пространства.
Разрешение выдается региональными, зональными и районными центрами ЕС ОрВД в зависимости от зоны воздушного пространства, которая будет использоваться при полете. При необходимости использования воздушного пространства над населенным пунктом дополнительно необходимо также получить разрешение органа местного самоуправления этого населенного пункта.
Эксплуатация беспилотного воздушного судна при отсутствии соответствующего разрешения влечет за собой привлечение Федеральным органом исполнительной власти, осуществляющим государственный контроль (надзор) в области использования воздушного пространства — Федеральной службой по надзору в сфере транспорта (ее территориальными подразделениями) к административной ответственности по ст. 11.4 КоАП РФ с назначением штрафа на граждан в размере от 20 тыс. до 50 тыс. рублей, на должностных лиц — от 50 тыс. до 150 тыс. рублей, на юридических лиц — от 250 тыс. до 500 тыс. рублей [18].
2.2.3. Согласование плана полета
За 24 часа до запуска беспилотника следует представить в ЕС ОрВД на согласование план полета(Рис 2). В нем указываются:
— границы (координаты) района полета;
— тип летательного аппарата;
— данные оператора;
— номер временного или местного режима ИВП.

Рисунок 2. Форма оформления на получения местного режима полётов
План полёта БПЛА и представление на установление временного и местного режимов воздушного пространства подавали на ниже указанные номера телефонов и адреса электронной почты оперативных органов ЕС ОрВД:
Непосредственно перед запуском БПЛА следует сообщить о начале полета по телефону в Главный или зональный центр ЕС ОрВД. О завершении использования беспилотника необходимо их также уведомить звонком (Рис 3).
За тем, чтобы беспилотники не запускались нелегально, следят полиция и Ространснадзор. Также отдельные зоны контролируют сотрудники ФСО, ФСБ, Минобороны, служб авиационной безопасности аэропортов.

Рисунок 3. СХР Полётного задания
Производить запуск, взлет БПЛА без установления связи с ЕС ОрВДзапрещается!
О всех изменениях в режиме полета БПЛА производится доклад в ЕСОрВД.
После приземления производится доклад в РЦ ЕС ОрВД о временипосадки и сообщается дальнейший план работы.
При потере связи с БПЛА производится немедленный доклад в РЦ ЕСОрВД. В докладе сообщается время и место потери связи, высота полетаБПЛА, предполагаемые оставшееся время полета и курс следования, районприземления (падения) БПЛА.
2.2.4. Требование к составу команд операторов управляющим БПЛА
К работе с комплексами дистанционного мониторинга на базе БПЛАдопускаются лица, годные к работе по п.п. 1, 3, 7, 13 «Перечня работ, привыполнении которых проводятся предварительные и периодическиемедицинские осмотры (обследования), приказ Министерстваздравоохранения и социального развития РФ № 83 от 16 августа 2004 года»,прошедшие обучение по утвержденным программам по эксплуатации БПЛАданного типа, усвоившие навыки практической работы с комплексом идопущенные к самостоятельной работе приказом по организации.
Для выполнения всех полетных задач, включая предполетный контроль,взлет, полет по маршруту, посадку, требуется расчет в составе 2-хоператоров.
При установке НСУ на автотранспортном средстве в состав расчетаможет включаться водитель.
Допускается эксплуатация комплекса одним оператором (если этооговорено в руководстве по эксплуатации данного типа БПЛА).
Операторы должны знать:
— порядок и правила эксплуатации БПЛА;
— основы самолетовождения, аэродинамики, метеорологии;
— специфику применения БПЛА
— правила ведения радиосвязи;
— правила техники безопасности при выполнении работ с БПЛА.
2.3. Требования к местам проведения взлета-посадок БПЛА
1. Порядок выбора точки старта БПЛА
1.1. изучить местность в предполагаемой точке старта, при этомнеобходимо учесть:
1.1.1. точку старта следует выбирать максимально высокойотносительно предполагаемого маршрута с минимальным удалением от исследуемых объектов для увеличения полезного времени работы и достижения максимальных результатов. Также в зависимости от требуемого объекта полета необходимо выбрать площадную или линейную аэрофотосъемку. В данном опыте мы использовали площадную аэрофотосъёмку. (Рис 4)
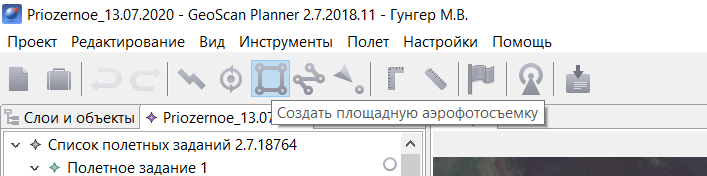
Рисунок 4 — Создание площадной аэрофотосъемки
Задайте на карте угловые точки исследуемого участка местности. Программа автоматически рассчитает маршрут обхода полигона. При построении маршрута отображаются наборвысоты и снижение БЛА в виде цилиндров, если разница высот соседних точек превышает30 метров. Если БЛА набирает высоту, то цилиндр залит оранжевым цветом, иначе – синим (Рис 5).
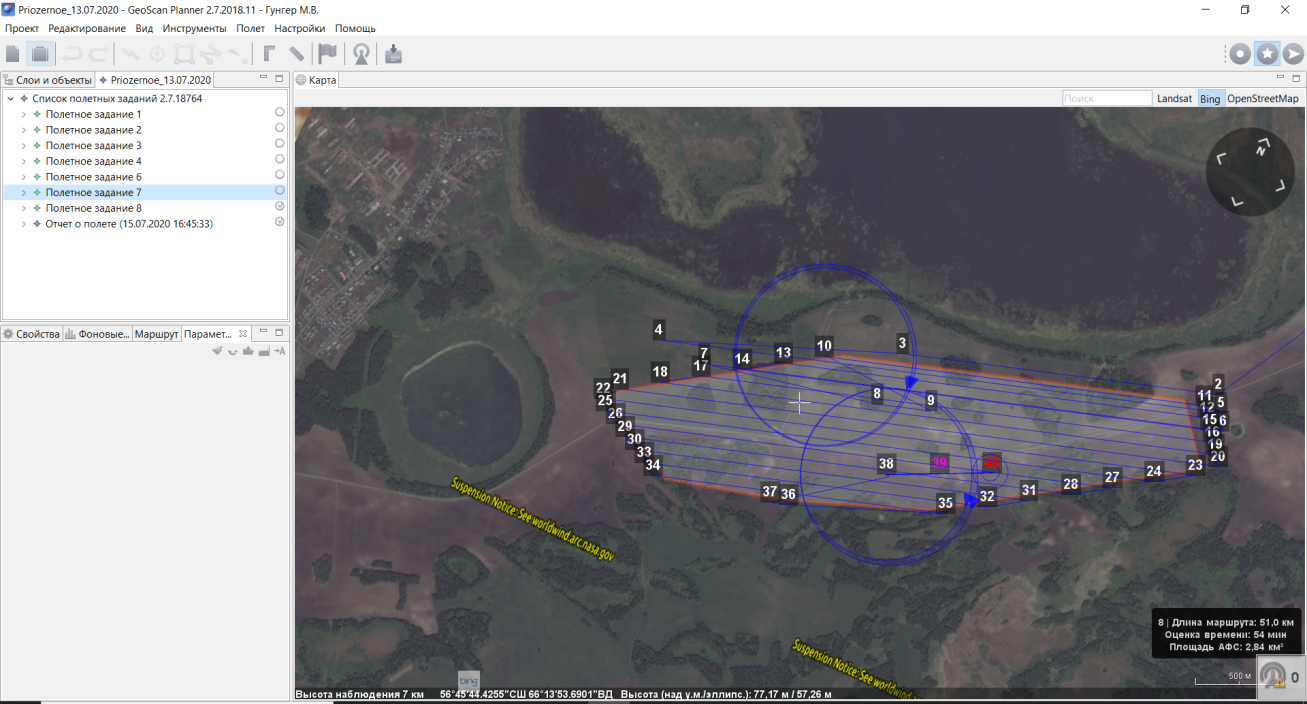
Рисунок 5 — Площадная аэрофотосъёмка
1.1.2. площадку для старта предпочтительно выбирать с травяным покрытием. Размер площадки должен быть не менее 100х100 м с условием, чтобы на прилегающей местности не находилось объектов препятствующих штатному режиму взлета, посадки и поиску БПЛА (реки, озера, овраги, строения, мачты, вышки и т.п.) в радиусе до 400 м.
1.2. определить положение сторон света;
1.3. определить направление и скорость ветра (направление и скоростьветра у поверхности земли и на рабочей высоте могут отличаться);
Команда Создать точку ожидания служит для того, чтобы БПЛА удерживало точку на высоте втечение отрезка времени. Позволяет измерять направление и силу ветра на высоте.
Нажмите на значок Создать точку ожидания на панели инструментов (Рис 6).

Рисунок 6 — Создание точки ожидания
Щелчком мыши на карте задайте точку, в которой должно осуществляться ожидание.
В экспертном режиме можно изменить свойства: задать высоту точки ожидания, длительностьожидания, направление движения и активировать функции измерения ветра и бесконечногоожидания.
Планер будет на заданной высоте «удерживать» точку в течение указанного времени (по умолчанию 300 секунд), после чего отправится по запланированному маршруту.
При активации варианта «Измерение ветра» длительность автоматически выставляется в значение 0. При этом точка ожидания окрасится в желтый цвет. Самолет выполняет полный оборот спостоянным измерением ветра (Рис 7).
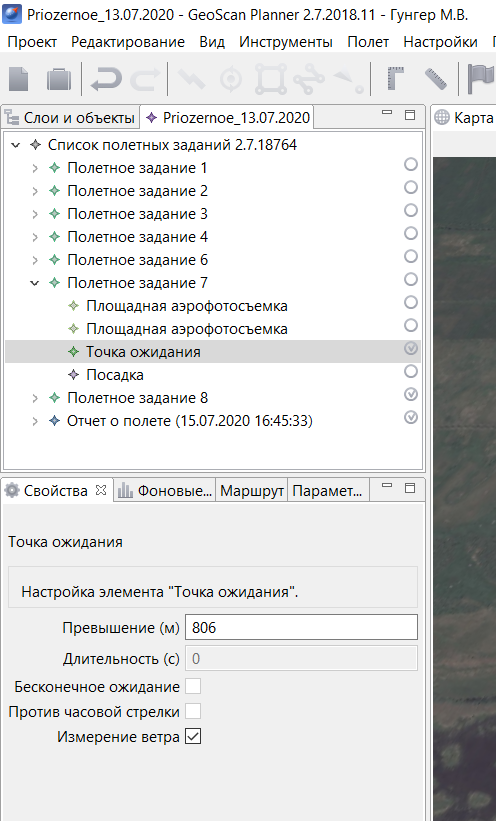
Рисунок 7 — Точка измерения ветра
Функция бесконечного ожидания служит для постоянного удержания точки (пока не сработаетотказ по низкому заряду АКБ, приводящий к автоматическому возврату). При этом цвет точкиожидания сменяется на темно-синий (Рис 8).
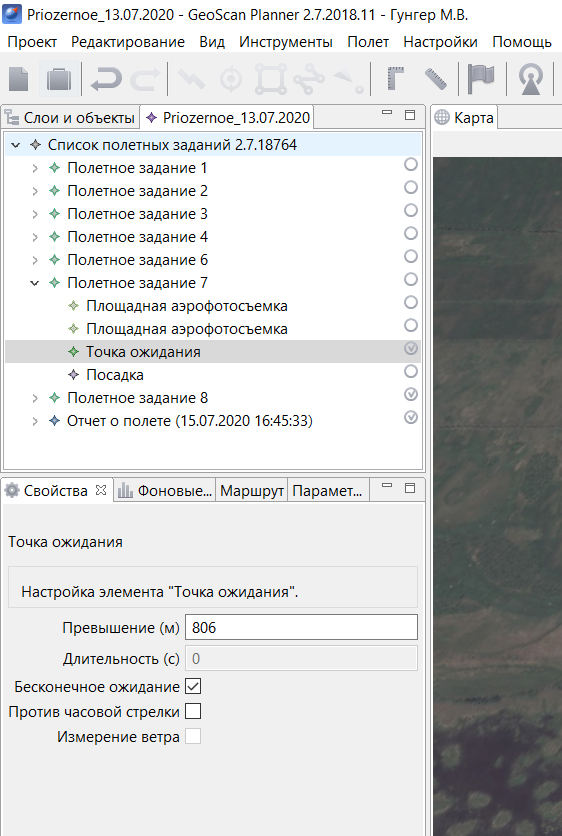
Рисунок 8 — Точка бесконечного ожидания
1.4. определить направление маршрута относительно НСУ и убедитьсяв отсутствии препятствий в этом направлении для обеспечения прямой радиовидимости;
1.5. определить направление запуска и убедится в отсутствиипрепятствий в этом направлении;
1.6. убедиться в отсутствии препятствий в зоне посадочной глиссады. Следует учесть, что на посадку аппарат заходит против ветра, точка захвата координат является точкой открытия парашюта в режиме автоматической посадки и аварийной посадки в случае потери связи;
1.7. для безопасного запуска и посадки БПЛА необходимо отсутствие препятствий: строений, мачт, вышек, заводских труб высотой более 100 м.
2. Выбор площадки посадки.
Площадка посадки выбирается вблизи точки старта из учета возможности визуального контроля оператором захода на посадку и посадки БПЛА.
Для посадки БПЛА выбирается ровный участок местности размером 100х100 м. На площадке не должно быть предметов, при приземлении на которые возможно повреждение БПЛА, а именно: кустов и деревьев, пней и камней, столбов и линий электропередач, зданий и сооружений, водоемов и тому подобное.
2.1. при посадке в ручном режиме точка выпуска парашюта определяется оператором исходя из текущих метеоусловий, размера, места и особенностей посадочной площадки.
2.2. Посадка в автоматическом (полуавтоматическом) режимевыполняется только при визуальном контроле БПЛА оператором.
Команда Создать посадку служит для построения маршрута посадки.Это обязательное действие при построении полетного задания.
Нажмите на значок Создать посадку на панели инструментов (Рис 9).
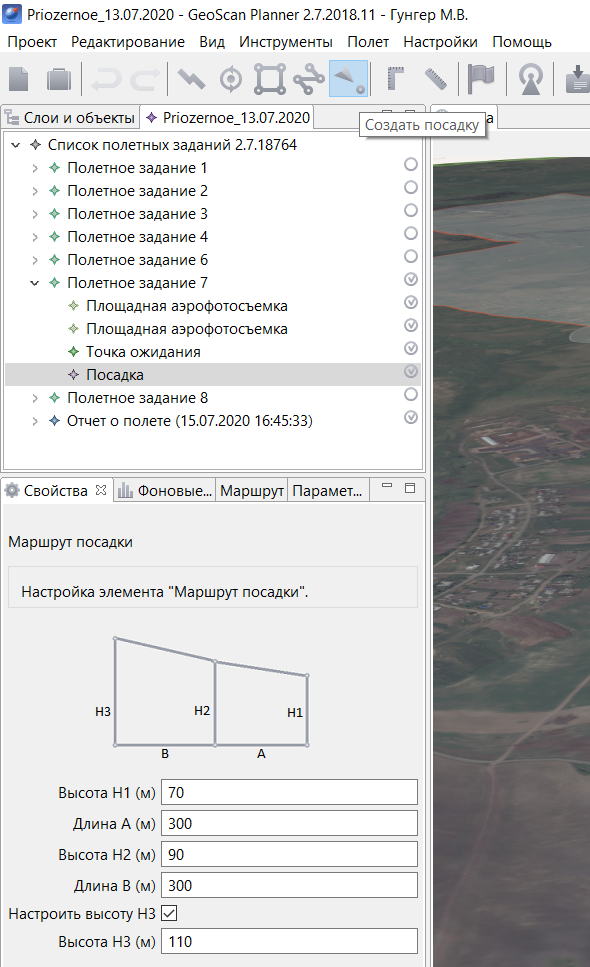
Рисунок 9 — Создание посадки
Щелчком клавиши мыши выберите сначала точку посадки, затем точку захода на посадку.Программа автоматически создаст маршрут посадки из трех точек (промежуточная точка создается автоматически) (Рис 10).

Рисунок 10 — Пример посадки
2.4. Процесс пилотирования Геоскан 201 Агро
Процесс пилотирования Геоскан 201 Агро проводится в автоматическом режима при помощи программы GeoscanPlanner.
1. Запускаем программу GeoscanPlanner.
2. В окне ввода логина и пароля вводим свой логин и пароль пользователя продуктаGeoscanPlanner.
3. Во вкладке Полет выбираем Подключить БЛА (Рис 11).
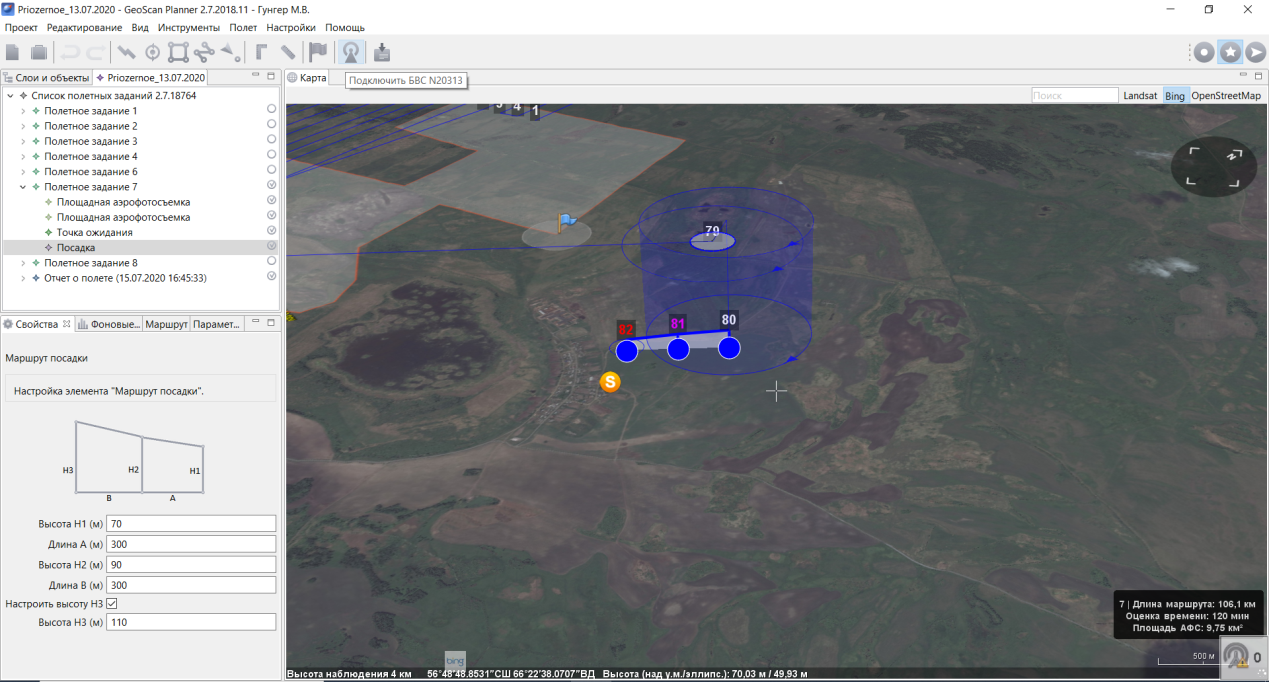
Рисунок 11 — Подключение БПЛА
Составление полёта происходило в соответствии с составленной нами методики. В данном хозяйстве при оцифровке полей мы использовали площадную аэрофотосъёмку.
Перед запуском БПЛА производилась сборка пусковой установки в соответствии с инструкцией по эксплуатации. Пусковая установка нужна для стартового разгона БПЛА до скорости, на которой оно может поддерживать устойчивый полёт. Перед полетом проводим предстартовую подготовку, запускаем Мастер предстартовой подготовки (Рис 12).
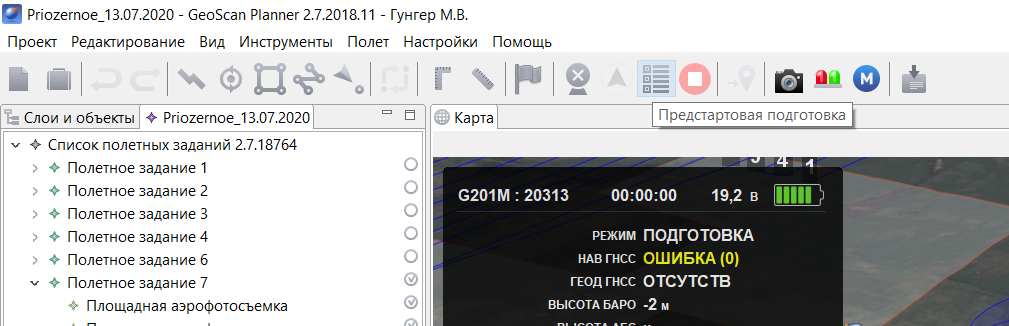
Рисунок 12 — Запуск мастера предстартовой подготовки
Мы следовали указаниям мастера предстартовой подготовки (большинство проверок выполнялось автоматически). Задали радиус автоматического отцепа парашюта и время автономного полёта (время, в течение которого осуществляется полёт независимо от наличия связи между НСУ иБПЛА). После прохождения предстартовой подготовки установили БПЛА на пусковую установку.
Чтобы произвести полёт необходимо нажать на кнопку старт в программе GeoscanPlanner, БЛА перейдет в стартовый режим. На панели телеметрии отобразится режим КАТАПУЛЬТА. Сняв предохранитель и активировав пусковую установку, потянув за спусковой шнур, БПЛА осуществит взлёт.
Запуск производится против ветра в соответствии с инструкцией по эксплуатации данного типа БПЛА. После набора заданной высоты полет БПЛА производится в автоматическом режиме. Оператору необходимо только контролировать полёт, а встроенные программные задачи обеспечивают безопасный взлёт и посадку при каждом запуске.
После завершения полёта посадка производится в автоматическом режиме в соответствии с полётным заданием и садится в радиусе 100м от заданной точки посадки.
После приземления БПЛА необходимо произвести:
1. отключение источника питания
2. запись фото информации с НСУ и БПЛА* на съемный носитель
3. Практическая апробация использования беспилотного летательного аппарата для мониторинга сельскохозяйственных угодий
Цифровые технологии также имеют определенную последовательность их выполнения в аграрном секторе. Базисом их являются геоинформационные системы. Сбор информации о земных и космических факторах продуцирования агроценозов, установлении их роли для роста и развития сельскохозяйственных культур дает основу разработки технологических операций с использованием систем спутниковой навигации [4, 5, 6].
Беспилотные летательные аппараты на первом этапе высокоточных технологий выполняют важную роль механизма проведения оцифровки полей. Ранее нами разработана методика создания электронных карт полей методом объезда [11]. Она апробирована в хозяйствах Тюменской, Свердловской, Курганской областях на площади более 224 000 га. Данный подход позволяет реально оценить ситуацию использования земельных угодий – метод точен в определении конфигурации полей, площади их, учитывает природные и искусственные объекты внутри сельскохозяйственных угодий. Но метод объезда полей трудоемок и имеет ряд ограничений при выполнении работ (сезонность, погодные условия, возделывание культур на полях и т. п.).
Формирование карт сельскохозяйственных угодий с географической привязкой к координатам при использовании беспилотного летательного аппарата «Геоскан 201 Агро» имеет более широкий временной диапазон проведения работ. Из обследованных 206 полей в хозяйствах Свердловской и Тюменской областях различие в площади, определенной методом объезда и с использованием БПЛА составляло 0.1-0.3 га (Рис13).

Рисунок 13. Оцифровка полей с использованием метода объезда и беспилотного летательного аппарата
В зависимости от размера земельного участка колебания в площади определенной этими методами были в интервале 0.3-1.2%. Например, площадь поля № 72, которая определена при облете беспилотного летательного аппарата Геоскан 201 Агро составила 22,9 га, а при использовании метода объезда – 23.0 га, площадь поля № 73 соответственно – 25.2 и 25.5 га. Однако, при оцифровке сельскохозяйственных угодий с использованием Геоскан 201 Агро на облет 100 га тратилось 8.6 минут, а при объезде в зависимости от конфигурации полей, состояния границ поля, погодных условий, наличия искусственных и естественных внутрипольных объектов – до 24-33 минут, т.е. в 3-4 раза больше.
Сопоставление данных результатов дает основание отдавать предпочтение беспилотным летательным аппаратам при проведении оцифровки полей. Для построения цифровых моделей сельскохозяйственных угодий используются спутниковые системы высокого разрешения. При дешифровании космических снимков прямыми признаками являются цвет (тон), структура и текстура изображения. Изучение, анализ их позволяет установить пространственные взаимосвязи между территориальными комплексами [8, 9].
Формирование электронных карт полей с использованием космических съемок способствует сокращению сроков их выполнения, затрат труда, получать оперативно сведения, биометрических показателей о культурах, так как искусственные спутники Земли снимают одну и ту же территорию несколько раз в течение суток.
Вместе с этим, построение границ полей с помощью космических спутников может искажать их расположение с нарушением географических координат (рисунок. 14, 15).

Рисунок 14 Треки объезда и оцифровка границ полей на ортофотоплане

Рисунок15 Смещение границ полей на космоснимкеЯндекс
Причиной этому может быть временной источник заимствования космоснимков из архивных баз данных различных спутниковых систем (ГУГЛ, ЯНДЕКС, БИНГ и др.), их технические возможности и режим работы.
При космоснимках основным объектом для нас служит земная поверхность с её агроландшафтной спецификой. Космоснимок центральной проекции, когда проектирование местности осуществляется прямыми (перпендикулярными) линиями, идеально отображает геометрические свойства (форму, размер) сельскохозяйственных угодий. В процессе же формирования изображения объекта, из-за наклона оптической оси в момент снимка, границы поля искажаются, т.е. координатные точки на ортофотоплане получаются смещенными относительно центральной сцены космоснимка. На качество космоснимка также оказывает влияние высота полета космических спутников, неровныйагроландшафт, погодные условия.
Так, космоснимок поля № 72 имеет размытое изображение внутрипольного естественного объекта (лесной колок), что затрудняет определить его точные границы и площадь (рис 16а). Причиной этому явилось снижение разрешающей способности снимка, которая связана с высотой полета искусственного спутника Земли, а также неравномерность светораспределения горизонтальной проекции объекта. Применение Геоскана 201 Агро для получения ортофотоплана позволило получить более четкое изображение внутрипольного лесного колка (рис 16 б).
 |
 |
| Рисунок16: а – Космоснимок поля № 72; | б – Снимок поля № 72, полученный с использованием беспилотного летательного аппарата |
На точность определения границ полей при использовании космических аппаратов оказывают погодные условия. Дистанционное зондирование Земли спутниковыми системами имеет ограничения из-за облачности в приземных слоях. Данное природное явление в условиях Западной Сибири случается часто – продолжительность солнечного сияния (когда солнце не закрыто облаками, туманами) составляет лишь 18,5-37,4% [9]. Растровые снимки, полученные с помощью искусственных спутников Земли в таких случаях не могут использованы при оцифровке полей, так как не имеют сплошных границ (рис 17).

Рисунок17. Снимок, сделанный спутниковой системой в облачный день
Решение аналогичных прикладных задач с использованием беспилотного летательного аппарата Геоскан 201 Агро в подобных ситуациях вполне приемлемо. Согласно технической характеристики БПЛА с максимальной высотой полета 4000 метров может проводить снимки на минимально безопасной высоте полета (под облаками) – 100 метров над сельскохозяйственными угодьями в необходимые сроки (рис. 18).

Рисунок 18. Снимок полученный БПЛА
4. Построение ортофотоплана, интерпритация состояния посевов по коэффициенту NDVI
В период летнего периода нами обследовано 20 028 га сельскохозяйственных угодий хозяйств Тюменской и Свердловской области с использованием беспилотного летательного аппарата Геоскан 201 Агро сформирован ортофотоплан 206 полей площадью 5552 га. На рисунке 19 приведен ортофотоплан полей СПК «Калининский» Свердловской области площадью 3500 га. Высокое качество ортофотоплана полей достигнуто при высоте съемки 700 метров и пространственном разрешении 12 см/пиксель.

Рисунок19. Ортофотоплан полей СПК «Калининский» Свердловской области
При формировании ортофотопланов полей хозяйств были определены границы их с географической привязкой к координатам, вычислены площади каждого поля в севообороте с учетом внутрипольных естественных и искусственных объектов.
СПК «Калининский» расположен в предгорном районе (Уральских гор) Свердловской области, где смыв почвы при увеличении наклона поверхности с 3 до 5 может возрасти в 2 раза. При разработке адаптивно-ландшафтных систем земледелия целесообразно учитывать невыравненный рельеф в многомерной системе координат. Намибыласформированацифроваямодельрядаполей (рис. 20)
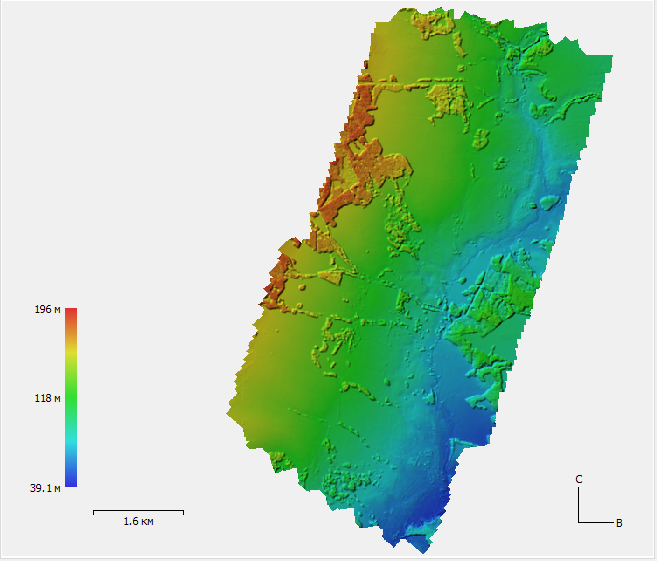
Рисунок 20. Цифровая модель поля СПК «Калининский» Свердловской области
Цифровая модель полей носит информативный характер и является основой рационального использования сельскохозяйственных угодий. Отображается характер рельефа, особенность расположения природной гидросети, модель помогает разработать ресурсосберегающую систему земледелия на этих полях, которая обеспечит воспроизводство плодородия почв и рост продуктивности агроценозов.
В процессе разработки практического использования БПЛА были сделаны ортофотопланы. Дистанционная фотометрия позволила получить вегетационные индексы. Обработку и построение карт NDVI проводили на примере поля № 72 площадью 23 га. Для сбора данных содержания хлорофилла в листовом аппарате на беспилотникеустановлен фотоаппарат с инфракрасным фильтром.
Первоначально карты отображаются в красных оттенках. Используя в программе функцию раскрас по палитре для карт NDVI отображение переводится в зеленый цвет. В формате КML (KeyholeMarkupLanguage) формируются границы полей, оцифрованные при облете сельскохозяйственных угодий.После получения контура границ поля, с помощью программы производится расчет нормализованных индексов NDVI, которые отражают содержание хлорофилла в растениях (рис.21).

Рисунок 22.Ортофотоплан нормализованных вегетационных индексов (NDVI)
Результаты обследования посевов яровой пшеницы показали, что поле имеет высокую вариабельность плодородия почвы и это отражается на состоянии культурных растений. Только на 0,4 га (из 23,0 га) индекс NDVI составил 0,4, то есть вегетационная масса имела хорошее состояние по обеспеченности азотом на 1,7 % площади. На 5,1 га (22,2% площади) состояние агроценозов удовлетворительное, на 11,9 га (51,7 % площади) – не удовлетворительное, а на 5,8 га (25,2 %) растения находились в депрессивном состоянии.
В целях оптимизации азотного питания агроценозов на поле следует наложить сетку (разбить на элементарные участки). При выборе размера ячейки необходимо учесть пестроту почвенного плодородия и рабочую ширину захвата агрегата, который будет вносить минеральные удобрения. В наших исследованиях подкормку яровой пшеницы проводили AMAZONE-1500 с шириной распределения удобрений 25 м, соответственно ширина сетки составила аналогичную величину. Пересчет индексов NDVI содержания хлорофилла на обеспеченность культурных растений азотом по элементарным участкам является основной для дифференцированной подкормки минеральными удобрениями посевов в режиме off-line с использованием систем спутниковой навигации.
Для полной картины оценки использования значений NDVI при расчете доз удобрений мы сделали сравнение и взаимосвязь определения содержания N в листьях культурных растений и содержание элементов питания в почве. Средняя связь установлена в фазу кущения яровой пшеницы (R2 = 0,60) между содержанием азота в листьях культурного растения и содержанием N-NО3 в почве (R2 = 0,27).
Сопоставление коэффициента NDVI полученного при облете Геоскан 201 на кукурузе 4-5 листьев и с использованием космоснимков имело тесную связь (R2 = 0,90), что свидетельствует о возможности использования БПЛА для оценки состояния агроценозов
Заключение
Дана сравнительная оценка различных методов проведения мониторинга за состоянием сельскохозяйственных угодий.
Обследование 20286 га сельскохозяйственных угодий в Тюменской и Свердловской областях, из них 206 полей площадью 5552 га.
Установлено, что создание электронных карт полей при пилотировании БПЛА Геоскан 201 Агро является более точным методом, оперативным в сравнении с использованием метода объезда и космических спутников.
Формирование карт сельскохозяйственных угодий с географической привязкой к координатам при использовании беспилотного летательного аппарата имеет более широкий временной диапазон проведения работ. Обоснованные поля БПЛА и методом объезда имела незначительные различия -0,1-0,3 га (0,3-1,2%).
При оцифровке сельскохозяйственных угодий с использованием Геоскан 201 на облет 100 га тратится 8,6 мину, а при объезде в зависимости от конфигураций поля, состояния границ поля, погодных условий, наличия искусственных и естественных внутрипольных объектов до 24-35 минут, т.е. в 3-4 раза больше.
Дистанционное зондирование Земли спутниковыми системами имеет ограничения из-за облачности в приземных слоях. При технической характеристике БПЛА с максимальной высотой полета 4000 метров проведены снимки на минимально безопасной высоте полета (под облаками) – 100 метров над сельскохозяйственными угодьями в необходимые сроки.
Беспилотный летательный аппарат быстро и эффективно помогает формировать нормализованный вегетационный индекс (NDVI) содержания хлорофилла, что является основой для дифференцированной подкормки культурных растений минеральными удобрениями.
Библиографический список
- Федоренко В.Ф. Цифровое сельское хозяйство: состояние и перспективы развития / В.Ф. Федоренко, Н.П. Мищуров, Д.С.Буклагин, В.Я.Гольтяпин, И.Г. Голубев // М.: ФГБНУ «Росинформагротех», 2019 – 316 с.
- Astapov A.YU.Unmanned aerial vehicles for estimation of vegetation quality/ A.YU. Astapov,K.A. Prishutov,I.P. Krivolapov, S.YU.Astapov,А.А. Korotkov//Amazonia Investiga. 2019. Т. 8.№23. С. 27-36.
- Abramov N.V.,Semizorov S.A., Sherstobitov S.V., Gunger M.V.,Petukhov D.A. Digitization of agricultural land using an unmanned aerial vehicle // Всборнике: 3 International Scientific Conference: agritech – 3 – 2020: Agribusiness, Environmental Engineering and Biotechnologies. Krasnoyarsk science and Technology City Hall of Engineering Associations. Krasnoyarsk, Russia, 2020. c. 32002
- Фирсов А.П. Применение беспилотных летательных аппаратов при геолого-геофизическом картировании / А.П.Фирсов, И.Н.Злыгостев, А.В.Савлук, П.А.Вайсман, А.К.Вальд, П.Г.Дядьков, А.С.Колесов, А.С.Шеремет// В сборнике: Геология и минерально-сырьевые ресурсы Северо-Востока России. Материалы Всероссийской научно-практической конференции. 2015. – С. 529-533.
- Сметнев А.С. Использование беспилотных летательных аппаратов в сельскохозяйственном производстве / А.С.Сметнев, В.К.Зимин, Ю.Б.Юдин, И.Н.Скобеев// Вестник Российского государственного аграрного заочного университета. 2015.№ 18(23). С. 51-56.
- Зулькарнаев В.У. Практическое применение беспилотных летательных аппаратов в современном мире / В.У.Зулькарнаев, В.Р.Камалова // Инновации в науке. 2016.№ 56-2. С. 23-27.
- Чащин А.Н. Оценка сельскохозяйственного использования почв по данным дистанционного зондирования (Пермский край на примере ООО «Крона-Агро») / Чащин А.Н.,Жижилев В.П. // Социально-экологические технологии. 2020. № 1. – С. 76-96.
- Абрамов Н.В. Земледелие с использованием космических систем / Н. В.Абрамов, С. А.Семизоров, С. В.Шерстобитов // Земледелие, 2015. №6. С. 13-18.
- Клепач Д.П. Беспилотные летательные аппараты / Д.П. Клепач // Новая наука: Опыт, традиции, инновации. 2016. № 4-2 (77). С. 128-130.
- Abramov N.V. Innovative Technologies of Cultivation of Crops in the Era of the Digital Economy / N. V. Abramov, S.A. Semizorov // International scientific and practical conference “Agro-SMART-Smart solutions for agriculture” (Agro-SMART, 2018), Atlantis Press/ Advances in Engineering Research, Volume 151. 2018, pp. 1-5. https://doi.org/10.299/agrosmart — 18.2018.1.
- Абрамов Н. В., Семизоров С. А., Шерстобитов С. В. Создание электронных карт полей / Н. В.Абрамов, С. А.Семизоров, С. В.Шерстобитов //Тюмень, 2019. – 84 с.
- Сухих В. И. Аэрокосмические методы в лесном хозяйстве и ландшафтном строительстве / В. И.Сухих //Йошкар-Ола, 2005. – 390 с.
- Федосеев А.П. Справочник агронома по сельскохозяйственной метеорологии / А.П. Федосеев, В. М. Пасов // Л. Гидрометиздат, 1986. 526 с.
- Правила учёта беспилотных гражданских воздушных судов с максимальной взлетной массой от 0,25 кг до 30 кг, ввезенных в Российскую Федерацию или произведенных в Российской Федерации: утв. постановлением Правительства Российской Федерации от 25 мая 2019 г. №658
- Федеральные правила использования воздушного пространства Российской Федерации: утв. постановлением Правительства Российской Федерации от 11 марта 2010г. №138: в ред. Постановлений Правительства РФ от 05.09.2011 N 743 (ред. 27.09.2011), от 19.07.2012 N 735, от 08.07.2015 N 685, от 04.08.2015 N 787, от 18.02.2016 N 112, от 12.07.2016 N 668, от 14.02.2017 N 182, от 02.12.2017 N 1460, от 30.01.2018 N 84)
- Новые правила для беспилотников: как реагировать и где запускать [Электронный ресурс] URL: https://mosreg.ru/sobytiya/obzory/novye-pravila-dlya-bespilotnikov-kakregistrirovat-i-gde-zapuskat-v-podmoskove (дата обращения 22.05.2020).
- Инструкции по разработке, установлению, введению и снятию временного и местного режимов, а также кратковременных ограничений: уст. приказом Министерства транспорта Российской Федерации от 27 июня 2011 г. №171: в ред. Приказа Минтранса России от 10.08.2017 г. №294 // Соб. законодательства Рос. Федерации. 2010. №14. ст. 1649
- Порядок регистрации и использования беспилотных летательных аппаратов // Независимое издание Консультант Плюс [Электронный ресурс] URL: http://consultantkhv.ru/newspaper/poryadok-registracii-i-ispolzovaniya-bespilotnyx-letatelnyx-apparatov/ (дата обращения 24.05.2020).